一种炮位侦校雷达目标模拟方法及系统
2021-04-20焦辰泽余建宇石伯翔
焦辰泽 余建宇,2 王 超 石伯翔
(1. 西安电子工程研究所 西安 710100;2. 西北工业大学自动化学院 西安 710072)
0 引言
炮位侦校雷达作为重要的战场情报侦察设备,在确定敌方炮位阵地及校正我方弹丸落点方面发挥着不可替代的作用。随着新技术、新体制的不断应用,炮位侦校雷达在研制、使用和后期维护过程中难免要进行性能测试和操作训练,以检查炮位侦校雷达的性能、提高装备操作人员的技能水平等。传统的做法是采用外场试验的方式进行上述操作,外场试验通过选定的炮位发射炮弹对炮位侦校雷达进行性能检验、测试等工作,虽然可以较好地满足要求,但是存在测试时间长、费用高、协调困难等问题,且测试炮位和弹道单一,不能很好地重现战场上可能出现的种种复杂情况,同时存在装备边界能力测试不充分的风险。
雷达目标模拟是指通过接收雷达的发射信号并进行调制转发以模拟雷达目标回波信号的技术手段,该技术是系统模拟技术与雷达技术相结合的产物[1],主要用于模拟待测目标与目标所处测试环境的各类信息,目的是将包含目标及环境信息的回波信号进行复现[2]。雷达目标模拟的主要参数有:距离、速度、散射截面积等[3],分别对应回波延时、多普勒频率和回波信号幅度。通过控制对接收雷达信号的延时调制可以在近距离模拟远距离处的雷达目标,通过控制对接收雷达信号的多普勒频率调制可以模拟各种速度的机动目标,通过控制对接收雷达信号的幅度调制可以模拟具有不同RCS(散射截面积)的目标,通过叠加多组不同调制参数的信号可以模拟具有多散射点的扩展目标。灵活的信号调制方式使得雷达目标模拟器可以模拟各种复杂的雷达目标回波信号,从而代替实弹射击对炮位侦校雷达进行测试。
传统射频雷达目标模拟器最大的缺点是无法进行合适的角度模拟,即在地面架设后难以灵活移动,只能模拟某一固定角度的目标,这显然无法满足对炮位侦校雷达进行目标模拟的要求。现有的针对炮位侦校雷达的目标模拟也有采用滑动天线和天线阵的方案,滑动天线方案因其运动控制困难、风险大等问题劣于天线阵方案,一维天线阵只能模拟俯仰角度的变化,模拟弹道逼真度不足,二维天线阵虽然可以模拟俯仰和方位两维角度的变化,但天线阵体积巨大,灵活性不足,且难以实现同时多批次目标的模拟。
1 雷达目标模拟基本原理
雷达目标模拟的主要参数有:距离、速度和目标散射截面积等,下面分别对其模拟原理进行介绍。
1.1 距离模拟
雷达靠发射电磁波并检测目标散射回来的电磁波来发现目标。通常认为,电磁波在均匀介质中的速度约等于光速c,雷达发射的电磁波在接触到目标后无延时地被散射回来,因此雷达接收到直线距离R处的目标的回波需用时2R/c,雷达便靠检测这个时间来确定目标的距离。假定雷达目标模拟器距雷达的直线距离为Rs,则雷达收到雷达目标模拟器的回波需用时为2Rs/c,通常雷达目标模拟器的摆放位置距雷达很近,位于雷达的盲区内,因此雷达不会接收雷达目标模拟器的回波。雷达目标模拟器的回波比距离R处的目标的回波提前2(R-Rs)/c到达雷达,因此雷达目标模拟器只要将接收到的雷达信号延时2(R-Rs)/c后再转发出去,即可模拟距雷达直线距离R处的目标的回波信号。
1.2 速度模拟
雷达信号遇到径向速度为VR的运动物体时,散射回来的电磁波频率会在雷达发射信号频率f0的基础上产生fd=2VRf0/c的频率偏移,偏移的频率称为多普勒频率,雷达靠检测回波信号的多普勒频率来识别动目标及动目标的运动速度。假定雷达目标模拟器相对雷达是静止的或者径向速度非常小的,则雷达目标器只要在接收到的雷达信号基础上增加fd=2VRf0/c的频率调制,即可模拟相对雷达径向速度为VR的运动目标。
1.3 目标等效散射截面积模拟
目标的等效散射截面积(RCS)[4]是雷达目标的一个重要特征,用于描述目标的后向散射特性,雷达收到的回波信号的强弱与此特性密切相关。目标散射截面积随目标在运动过程中的速度、方向、姿态等参数发生变化,通常用一个接近而又合理的模型来估计这种变化带来的影响,可分为点目标模型和扩展目标模型两大类[5]。为了简化设计,论文采用非起伏的点目标模型,假定目标的散射截面积是常数,将雷达目标模拟器的输出功率与输入功率设计为线性等比关系,利用等比关系模拟目标散射截面积对雷达信号回波幅度的影响。由雷达方程推导可得,雷达目标模拟器的输出功率Ps_t与输入功率Ps_r的线性控制因子为
(1)
其中:F和Fs分别为模拟目标环境方向传播因子和雷达目标模拟器航线环境方向传播因子,σ为模拟弹丸的RCS,Ds和Gs分别为雷达目标模拟器天线的有效接收孔径和发射增益。通过公式(1)计算值控制雷达目标模拟器输出与输入功率的比例,即可模拟在模拟器与雷达主瓣指向方向上距离为R处、RCS为σ的目标。
2 外弹道理论分析与仿真
炮位侦校雷达发现目标弹丸后,通过多次测量目标的位置、速度等信息获取到多组有效数据,然后通过外推算法确定敌方炮位或弹丸落点,若炮位侦校雷达检测到目标的运动规律不符合弹丸的运动规律,则将其认为是虚假目标并剔除。因此,为了逼真地模拟出炮位侦校雷达的目标,即炮弹弹丸及其外弹道,雷达目标模拟器必须获取模拟目标弹丸的实时具体位置和相对于雷达的径向速度。下面对炮弹的外弹道进行仿真分析。
外弹道方程主要是在弹丸质心运动和刚体运动两方面[6],只考虑弹丸质心运动的外弹道方程有质点弹道方程组、修正质点弹道方程组等,考虑弹丸刚体运动的方程称为刚体弹道方程组。质点弹道方程是实际弹道的最简单模型[7],但易于揭示弹丸质心运动的基本规律,由于目标模拟只关心弹丸的空间位置和速度,因此质点弹道方程可以满足要求。考虑空气密度随高度变化的质点弹道方程组为
(2)
式(2)中,(x,y,z)为弹丸的位置坐标,vx、vy、vz分别为弹丸在三个坐标轴方向的速度分量,v为弹丸的速度,g为重力加速度;ccoef为弹丸的弹道系数,与弹丸的形状、材质等有关;H(z)是空气密度函数,与海拔高度有关,在标准气象条件下有近似的经验公式为
(3)
G(v,cx)为空气阻力函数,它是弹丸的速度v和阻力系数cx的函数,为了便于计算,通常引入一个弹丸的虚假速度(简称虚速)vτ,并有
(4)
式(4)中,cs为本地音速,con为地面标准音速。vτ的含义是:本地音速是cs时和弹丸马赫数Ma相同的弹丸设想速度。同时,弹丸的虚速vτ和空气温度有关,为了消除湿度的影响,假设存在干燥的空气,它的温度只与海拔高度有关(称为虚温τ),虚温的经验公式为
(5)
式(5)中,G=6.328×10-5,A=230.0K,B=6.328×10-3,C=1.172×10-6;τon为地面上的虚温,常取288.9K。弹丸的速度v、虚速vτ和空气虚温τ的关系为
(6)
同时,将空气密度函数H(z)也变为干空气密度函数Hτ(z)
(7)
最后,得到空气阻力函数G(v,cx)的变形G(vτ)
(8)
至此,考虑空气密度随高度变化的质点弹道方程组变形为
(9)
对于外弹道方程组的计算,通常使用龙格库塔(Runge-Kutta)法进行求解,其优点是计算精度高、步长可变,但计算量稍大。四阶龙格库塔法基于公式(10)计算下一个状态值yn+1
(10)
公式(10)中,yn是当前时刻的状态变量,f(x,y)是要求解的方程。对应到弹道方程中,则yn=[x,y,z,vx,vy,vz],f(x,y)即是公式(9)所代表的弹道方程。需要注意的是,f(x,y)中的x是指方程中的自变量,它的单位与步长h相同,在弹道方程中,它指的是时间。因此,只需将弹丸的初始状态y0和弹道方程(9)代入公式(10),选取合适的步长h,通过反复迭代即可计算出弹丸每一时刻的状态。
仿真采用文献[6]提供的参数,即弹丸初速v0=700 m/s、弹道系数ccoef=0.6617、初始方向(弹道倾角)θ=45°,以出炮口为原点,沿x轴方向射击,仿真步长0.001 s,外弹道仿真结果如图1所示。从图中可以看出,弹丸最大射程约16474 m,与文献[6]提供的标准射程16375 m相比,误差约为0.61%,仿真结果比较符合弹丸的实际飞行规律。
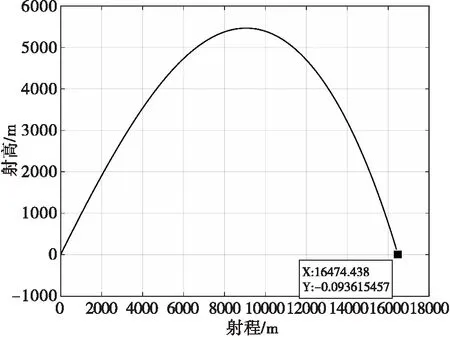
图1 外弹道仿真结果
3 模拟方法及系统组成
3.1 模拟方法
传统的雷达目标模拟器是静止不动的,难以实现方位和高度的模拟,因此难以实现逼真的炮位侦校雷达目标模拟。随着无人机技术的发展,尤其是大规模无人机表演技术的成熟,无人机的控制能力大幅提升,将无人机应用到雷达目标模拟上来成为可能。由无人机搭载雷达目标模拟器在空中按一定航迹机动,模拟弹丸角度和高度的变化,结合模拟器对收到的雷达信号的调制转发,从而实现逼真的弹丸和弹道模拟。下面以炮位侦校雷达的侦察模式为例介绍弹道模拟的原理,如所图2所示。

图2 炮位侦校雷达侦察模式下目标模拟原理示意图
以雷达所在位置为坐标原点、以雷达法线方向为X轴、垂直于雷达法线方向为Y轴、垂直于地面为Z轴建立空间直角坐标系,假设弹丸出炮口的位置为(PX0,PY0,PZ0)、出炮口速度为V0、射角为θ0、射击正向与雷达法线方向夹角为α,则出炮口弹丸的速度分量为
(11)
将设定的弹丸的初始位置、初始速度代入质点弹道方程组,利用龙格库塔法进行求解,求得模拟弹丸每一时刻t在空中的位置(PX,PY,PZ)和速度(VX,VY,VZ),则模拟弹丸在空中任一时刻t距雷达的距离和高度为
(12)
模拟弹丸在空中任一时刻t的速度V与弹丸和雷达连线方向的夹角为
(13)
则模拟弹丸相对雷达的径向速度为
(14)
化简后得
(15)
假设模拟器和无人机的空间位置坐标为(PXS,PYS,PZS),则无人机的位置与模拟弹丸的位置有如式(16)的比例关系。
(16)
同时,规定无人机只在垂直于雷达法线方向和垂直于地面方向上移动,即PXS为常数,解得
(17)
由此得到了无人机每一时刻在空中的具体位置。雷达目标模拟器再根据模拟弹丸的位置(PX,PY,PZ)、无人机的位置(PXS,PYS,PZS)和模拟弹丸相对雷达的径向速度VR计算出每一时刻相应的延时参数和多普勒频率
(18)
(19)
之后雷达目标模拟器实时将解算得到的预定位置命令参数传送给无人机,并根据延时参数和多普勒频率对接收到的雷达信号进行调制、转发,从而实现逼真的弹道模拟。
假定模拟炮位位于雷达法线方向上,与雷达水平直线距离20 km,射击正向与雷达法线方向夹角180°(即沿雷达法线方向射击),弹丸初速700 m/s,射角45°,弹道系数为0.6617,无人机距雷达水平直线距离100 m,图3、图4分别给出弹丸出膛后10 s内的模拟弹道、无人机的机动航迹、以及模拟弹丸和无人机的相关参数变化曲线。
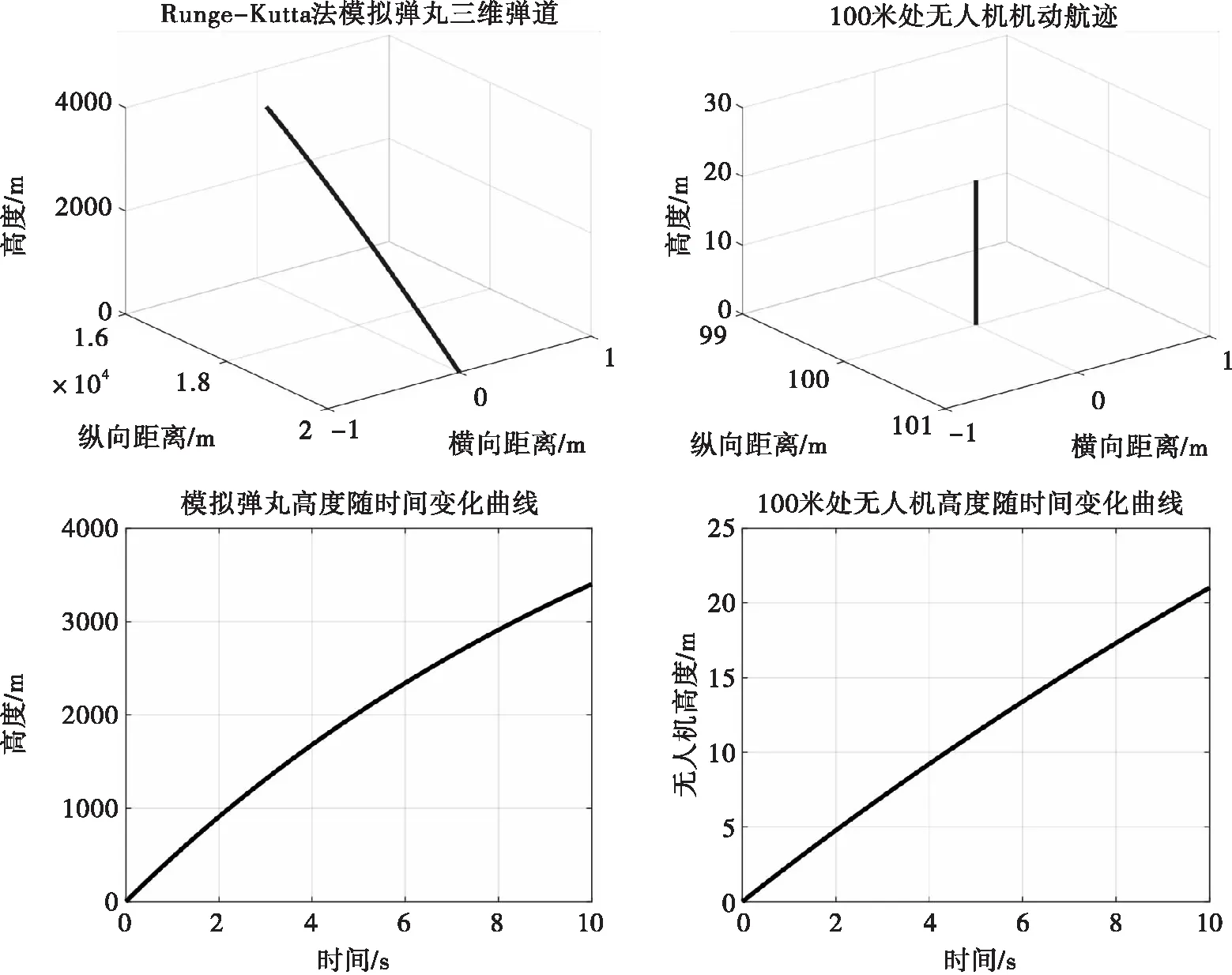
图3 模拟弹丸弹道、高度和无人机航迹、高度曲线图

图4 模拟弹丸径向距离、径向速度曲线图
3.2 系统组成
炮位侦校雷达目标模拟系统主要由雷达目标模拟器、旋翼无人机、地面控制站及地面差分定位基准站组成,其中,雷达目标模拟器包括天线、收发变频模块、信号处理模块、无线通信模块及电源等。系统组成框图如图5所示。
图5 系统组成框图
雷达目标模拟器主要由天线、收发变频模块、信号处理模块和无线通信模块组成。天线负责雷达信号的接收和发射;收发变频模块包括射频收发前端、上下变频和频综,负责与天线的信号交互、信号的上下变频和频率综合,模块的瞬时带宽为1 GHz,可以覆盖变频雷达的频率变化范围,为了减小模块体积和重量,上下变频和频综采用一体化设计;信号处理模块包括高速ADC芯片、高速DAC芯片、FPGA芯片、DDR3存储芯片、高速DSP芯片和时钟芯片等,负责雷达目标模拟器的工作流程控制、信号参数测量、控制参数解算、目标转发信号处理等工作;无线通信模块负责雷达目标模拟器和地面控制站、地面差分定位基准站之间的通信工作。
地面控制站包括控制计算机和无线通信模块。控制计算机集成了无人机控制系统和雷达目标模拟器控制系统,可同时实现对旋翼无人机的控制和对雷达目标模拟器的控制;无线通信模块负责地面控制站和雷达目标模拟器之间的通信。
地面差分定位基准站包括定位模块和无线通信模块。定位模块负责接收GPS信号并解算自身位置;无线通信模块负责将解算后的位置数据发送给雷达目标模拟器用于差分校正,从而使无人机获得更加精确的位置数据。
系统工作时,在距离目标雷达一定距离的场地内,旋翼无人机搭载雷达目标模拟器在地面控制站的控制下升空,并根据GPS信号和地面差分定位基准站精确确定自身位置,之后雷达目标模拟模拟器开始接收目标雷达辐射过来的信号,并经下变频后传送给信号处理模块,信号处理模块对雷达信号进行参数测量并形成辐射源报告,经由无线通信模块发送给地面控制站;地面控制站可根据收到的辐射源报告显示雷达信号的相关参数,并决定是否开始进行目标模拟;目标模拟模式开始后,模拟器根据设定的工作模式计算目标模拟的相关参数,如延时量、多普勒频率、无人机的位置参数等,由信号处理模块完成模拟弹丸信号的调制,再通过变频模块传送给收发前端和天线,向目标雷达辐射,从而实现炮位侦校雷达目标弹丸的距离和速度模拟;同时,雷达目标模拟器和旋翼无人机实时共享精确的位置数据,由模拟器计算目标模拟时无人机的位置数据,实时发送给旋翼无人机,旋翼无人机根据收到的位置数据实时在空中小幅度机动,实现炮位侦校雷达目标的角度、高度模拟;最终,模拟器和无人机相互配合,完成炮位侦校雷达的逼真目标模拟。系统工作流程如图6所示。
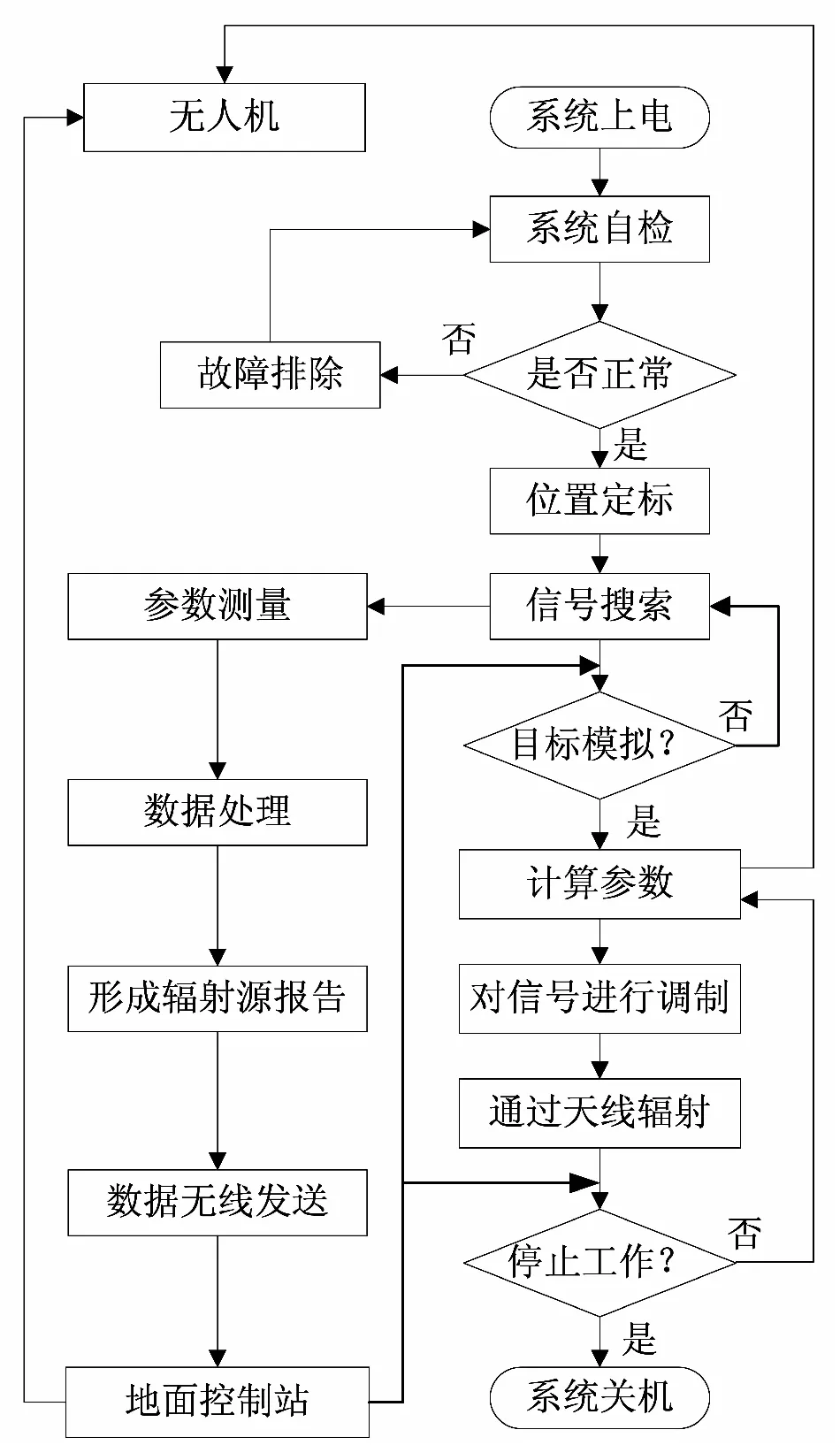
图6 系统工作流程图
4 结束语
本文针对炮位侦校雷达目标模拟的实际需求,在分析了目标模拟的基本原理和外弹道方程后,将无人机技术与雷达目标模拟技术相结合,提出了一种有效的炮位侦校雷达目标模拟方法及系统,该方法根据设定的模拟炮位和弹丸初速等初始值,实时迭代求解外弹道方程,并利用求解结果计算目标模拟的相关参数,通过无人机和雷达目标模拟器的协同控制实现逼真的炮位侦校雷达目标模拟,同时还具备检验炮位侦校雷达弹道外推精度和扩展同时多批次目标模拟的能力。论文最后给出了可行的系统组成和系统控制流程图,具有较强的工程可行性和使用价值。