星载电场仪传感器设计与空间应用研究
2021-04-16雷军刚马勉军
刘 泽,雷军刚,马勉军,李 诚
(兰州空间技术物理研究所,甘肃 兰州 730000)
目前我国正在开展的空间等离子体环境的电场探测不仅为研究全球空间电离层、电磁场分布及相互作用效果等提供了科学数据,同时还为研究与地震相关的电磁场变化提供了科学依据[1-4]。发达国家从20世纪后半期就进行了多次以空间环境研究为目的的卫星发射任务,对与空间电磁场环境变化有关的各种自然现象进行了大量研究[5-11],例如2004年法国发射的DEMETER卫星和2000年欧洲航天局发射的欧洲磁层观测星座“星团”——Cluster系列卫星等[12]。科学家通过观察空间电场数据的变化来分析研究与火山喷发、太阳活动、天气变化等有关的电离层变化,尤其是与地震活动相关的电离层前兆现象。2018年2月2日中国发射了以空间电场探测仪为主要载荷之一的电磁监测试验卫星,卫星在轨观测、获取并成功传回了大量的中国及邻区空间电场的各种探测数据。电场探测仪空间工作环境为低轨道稀薄冷等离子体环境。空间等离子体环境下较为成熟的电场探测方法主要是双探针式和电子漂移式电场测量法[13]。根据卫星总体对探测载荷任务的需求,电场探测仪采用主动式双传感器测量原理。因此用于空间电场信号探测的球形传感器就变得尤为重要,从而对球形传感器结构设计原理的分析及工程实现的高精度、一致性、互换性等提出了较高的要求。
本文设计的电场探测仪采用主动式双传感器探测原理,以突破高精度星载电场探测仪关键技术为目的,研制符合我国电磁环境监测试验卫星工程化设计指标要求的空间电场探测载荷产品,并为后续相关任务提供技术基础。
1 传感器工作原理及组成
将4个不共面的传感器安装在卫星不同位置[14],采用主动式双传感器进行空间电场测量,其测量精度高、适用范围宽,可应用于低密度等离子体环境。双传感器测量法常用的传感器形状是规则的球形或圆柱型。电场探测仪采用球形传感器,双传感器测量原理如图1所示。

图1 双传感器测量原理示意图
设球形传感器A和B所处的空间环境的电势分别为Vpa和Vpb,则两传感器在等离子体环境的电势差Uab可表示为:
Uab=Vpa-Vpb=E′d
(1)
由于空间等离子体环境电势受到传感器实际测量电势和卫星地电势的综合影响。因此传感器测量的空间电场可表示为:
(2)
式中:Vxa,Vxb为传感器A和B表面电势分别相对于卫星地的电势差,V;Va,Vb为传感器A和B表面电势分别相对于周围等离子体环境的电势差,V。
考虑卫星在空间沿轨道运动会切割地球磁场,双传感器法测量到的空间电场E′需扣除切割磁力线产生感应电势的影响,实际空间电场E表示为:
(3)
式中:u为卫星运动速度,m/s;B为卫星运动所处位置的地球磁感应强度,T。为了消除Va,Vb电势差的影响,需要从原理设计到工程实践中尽可能地保持两球形传感器的一致性。
2 球形传感器的设计
依据科学任务所要求的产品主要技术性能指标如下:频率范围为DC~3.5 MHz,分辨率为1 μV/m,灵敏度为0.1 μV/mHz-1/2;动态范围为120 dB。电场探测仪需要对ULF到HF各种频段信号进行测量,综合考虑选用球形传感器。如果想使用等离子体环境中不同位置的两个球形传感器进行宽频带高精度测量,必须使两传感器有较好的一致性,这样两传感器表面电势差可等效为其所处的周围等离子环境的电势差。在球形传感器结构设计上需要保证传感器表面功函数与球体表面积尽量一致[15]。
电场探测仪球形传感器由2个短杆结构、球壳结构、球壳表面涂层、电势引入结构等组成。结构材料主要采用硬铝合金,强度高、变形小,满足航空航天的结构研制需求。根据载荷任务要求设计的球形传感器结构如图2所示。
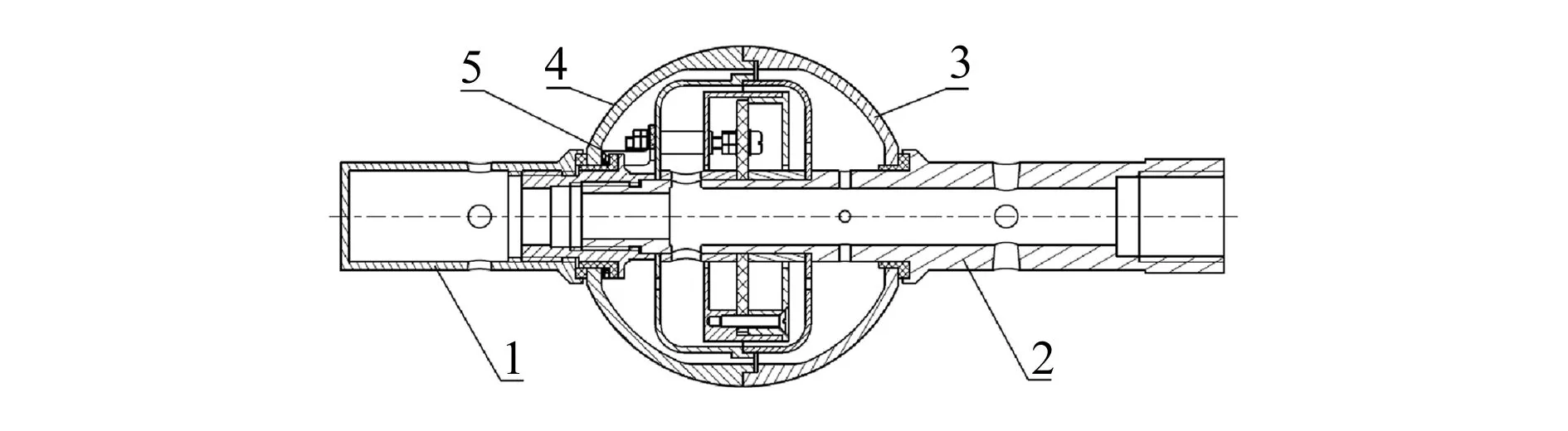
1—短杆1;2—短杆2;3—球壳;
2.1 球壳结构设计
球形外壳主要用于供表面涂层结构的涂覆和内部电路测量结构的支撑,并与表面涂层共同接触空间等离子环境从而感应等离子电势。由式(2)、(3)联合电子学物理参数得到与球壳最小半径的关系式为:
亲友源源不断地到来,桃花和梨花机械地干号,一波又一波。来得最晚的是三舅家,因为贫困早年三舅家就迁去了东沙围垦地,赶过来有八十多里路,到时天都黑了,晚饭也过了,人们已聚在凉棚下打牌、聊天;桃花和梨花傻呆呆地守着灵,突然听到有人喊:“三娘舅来啦!”桃花和梨花先是一愣,随即又干号起来,声音哑哑的。
(4)
式中:Rm为运算放大器输入阻抗,取Rm=2R≈7.5×1011Ω;r为球形传感器半径,m;rmin为球壳最小半径,m;α为传感器电势差的允许测量偏差,α=0.86×10-6;n为鞘层外等离子体密度,取n≈10 el/m3;e为电子电荷量,为常数;me为电子的质量,为常数;k为波尔兹曼常量;Te为电子温度,取Te≈2 500 K;V为浮点电势,V。
当其他参数确定时,根据卫星轨道等离子体参数及电路设计参数可得:

(5)
由式(5)计算得到rmin≈3×10-2(m)=30(mm)
球壳半径大小与等效耦合阻抗、热噪声、抗力学环境、立体角遮挡等有关,应综合考虑该值为半径在结构设计上的最优值。
2.2 球壳表面涂层结构设计
通过对不同材料进行表面功函数测试发现,掺碳环氧涂层DAG213一致性好,球壳表面涂覆掺碳环氧涂层对传感器表面光电流引起的耦合电势差、接触电势差都小。
研究表明,球壳表面状态受DAG213掺碳涂层附着力与涂层涂覆后球体表面最终状态的影响[16-17]。由此可知影响球壳表面状态的因素有表面粗糙度及表面轮廓度,表面粗糙度过大,则球壳表面涂层涂覆后球体表面最终粗糙度同样变大,引起球壳表面太阳光照面积的变化,从而影响球壳表面光电流的大小[18];而表面粗糙度过小,则会造成涂层附着力下降,加工难度增大。为了使球壳表面功函数具有好的一致性,粗糙度设计为0.3 μm,此时球壳表面具有良好的附着力,满足传感器环境使用要求,同样在涂层涂覆后对球壳表面进行二次机械加工时,粗糙度也可控制在0.3 μm以内。
球壳表面轮廓度反映了传感器真实外形与理想球体的差异。由主动式双传感器测量原理可知,对于半径均为r的两个球形传感器,表面轮廓度越小,两个球体表面积一致性越好;因其表面轮廓度的差异引起的真实球壳半径差异,在相同等离子体环境下引起的球体表面电势差同样也越小,从而使表面光电流差值越小,测量精度越高。当球壳半径r的变化为Δr时,产生的电势差ΔV为
(6)
式中:RS为球壳表面阻抗,Ω;I为电子电流,A;Ib为表面光电流,A。这些参数可以根据设计方案选取,其中Δr的大小对于两球壳表面引起的电势差与实际工程实施相互矛盾,为满足测量精度,同时根据球壳在实际工程加工中的难度,当Δr≤30 μm时,计算得到ΔV≤0.2 mV,满足工程设计要求,因此表面轮廓度设计值不得超过30 μm。
2.3 短杆结构设计
由图2可知,图中球形传感器短杆2主要用于与卫星伸杆的连接[19],由于该短杆及伸杆的存在,会影响传感器表面太阳光照面积的不同,从而导致球形传感器表面光电子流发射的差异,因此为了使各组传感器受太阳光照面积尽可能相同,有必要在球形传感器短杆2的对称方向设计同样长度的短杆1,保证球形传感器在同一时刻、同一轨道区间的光电子流发射的一致性。图3所示为附加短杆与太阳光入射角关系示意图。

图3 附加短杆与太阳光入射角关系示意图
当球形传感器半径r确定时,短杆1长度l与太阳光遮挡角α0之间的关系为
(7)
由式(7)可算得短杆1不同长度对应的太阳光遮挡角α0,见表1。

表1 短杆1不同长度对应的太阳光遮挡角
由表1可知,短杆1长度l在70~85 mm时,太阳光遮挡角α0变化缓慢,考虑结构抗力学环境要求,短杆1长度取70 mm。短杆2与短杆1沿球形传感器中心对称设计,且外形和直径都相同,才能保证太阳光照射产生的阴影面积相等。考虑到短杆2与卫星伸杆连接,长度可增加到85 mm。
3 传感器抗力学环境仿真分析
为了适应卫星发射段的力学振动环境,依据卫星对载荷力学试验的技术要求,试验条件设置如下:1)载荷单机产品的基频不小于100 Hz。2)正弦振动的频率为10~20 Hz时,振动幅值为6.25 mm;频率为20~100 Hz时,振动加速度为10g。3)随机振动的频率为10~130 Hz时,功率谱密度0.450g2Hz-1;频率为130~2 000 Hz时,功率谱密度0.055g2Hz-1。4)冲击响应的频率为100~4 000 Hz时,加速度为700g。
根据以上试验条件,通过ANSYS分析软件对传感器基频、正弦振动、随机振动、冲击响应等进行抗力学环境仿真分析,其结果证明产品结构设计满足抗力学环境要求,能够保证产品工程实现的可控性及产品质量的可靠性。其分析结果如图4所示。

图4 传感器整机抗力学环境分析结果图
传感器主要外形结构采用硬铝合金材料,该材料具有比重较小,刚度、强度高,工艺性好,技术成熟,抗腐蚀性好等优点,从而改善了其在力学环境条件下的受力状况。将各工况最大应力值代入安全裕度计算公式,即可求得相应的安全裕度。
(8)
式中:MS为安全裕度;σmax为产品的最大作用载荷;f为常数。由式(8)计算可得,3种力学环境工况的安全裕度均大于零。其计算结果见表2。
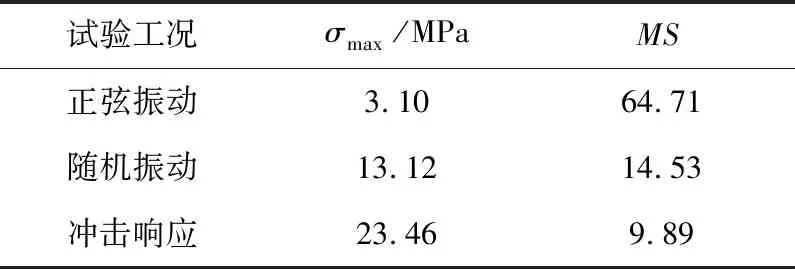
表2 各力学工况下结构最大应力
由图4可知,传感器结构1阶固有频率为123.6 Hz,满足卫星平台对单机产品基频大于100 Hz的要求,分析结果与传感器在试验台实际扫描基频一致,表明传感器力学仿真建模与参数设置准确,结构设计合理,整机结构刚度、强度满足抗力学环境的要求。
4 传感器性能测试
为了充分验证上述设计理论的工程可行性及实用效果,依据产品主要技术性能指标要求,对传感器进行了功能和性能测试,传感器实物如图5所示。

图5 球形传感器样机
电场探测仪球形传感器在经历力学振动试验与热学环境考核试验后,进行功能及性能测试。性能测试结果如图6所示,结果表明球形传感器工作正常,分辨率在低频范围达到了70 μV/m,灵敏度用功率谱密度(PSD)表示达到了0.1 μV/mHz-1/2,在试验前后信号输出无变化,整机结构无松动,连接可靠,符合规定的抗力学环境要求。
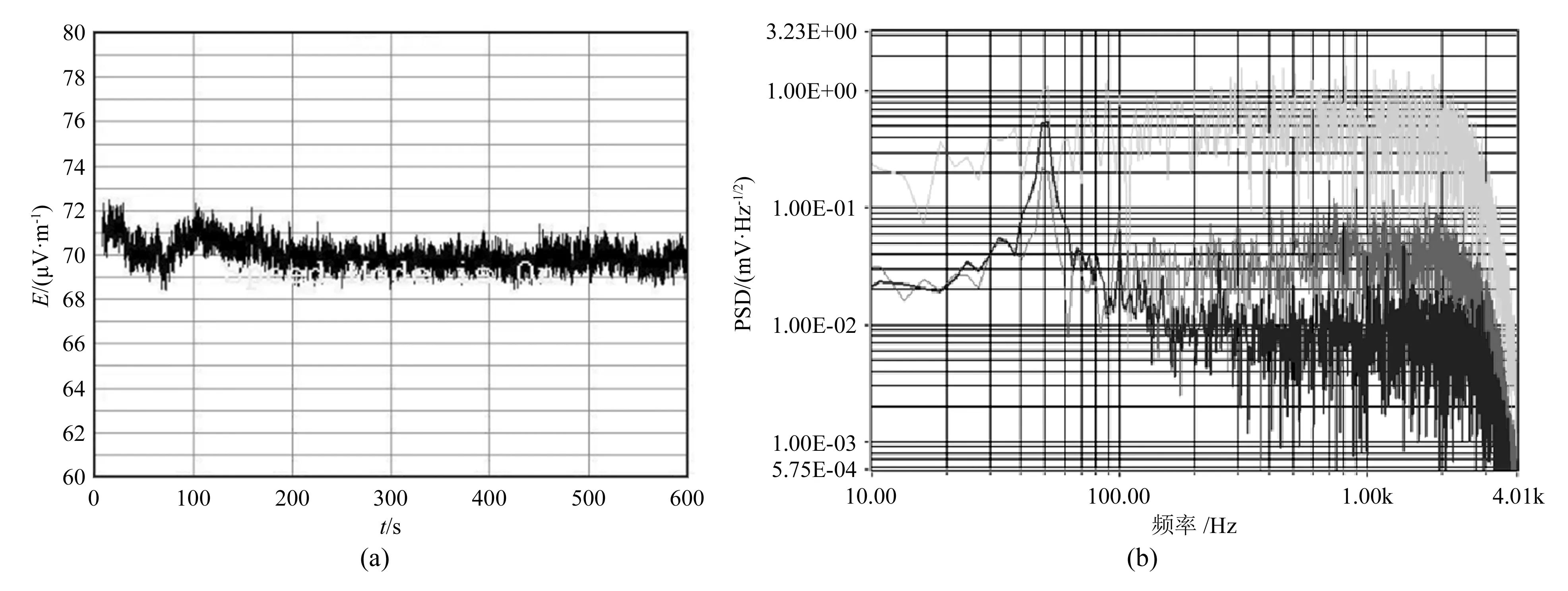
图6 球形传感器性能测试结果
5 结束语
空间电场探测仪球形传感器的成功研制,代表我国具有对地球周围空间等离子体环境电场变化的高精度探测能力。该仪器具有质量轻、测量范围宽、不受地面自然条件限制等各种优势,对研究地球电磁场空间环境变化有重要意义。测试结果分析表明,由于载荷在空间等离子体环境相比地面环境的干扰更小,因此各项性能指标远远优于地面环境测试结果,其指标与国外同类空间电场探测仪器相当,低频段分辨率、灵敏度等部分性能指标甚至优于国外同类在轨探测仪器。该传感器精度高,为国内首次实现的在轨成功应用,测试数据可供科学研究空间电场环境变化特性使用。
