智能电动车辆横纵向协同运动控制
2021-04-16史鸿枫刘明春黄菊花
史鸿枫,刘明春,黄菊花
(南昌大学机电工程学院,江西 南昌 330031)
智能车辆将智能制造技术与基于线控系统的电动车辆相结合,融合了两种领域各自不同的特点与优势,将驾驶员从复杂的驾驶环境中解放出来,大大减轻其驾驶过程中的压力,同时显著提升车辆的行驶安全性、稳定性和舒适性[1-3]。智能车辆的研究作为未来汽车工业发展的新方向,其具体过程包括:通过车载传感器采集环境信息,针对不同工况与行驶要求进行决策并规划轨迹,最后控制车辆按照既定轨迹平稳行驶。而运动控制作为智能车辆研究的核心问题,其主要内容包括横向控制和纵向控制[4-5]。
横向运动控制主要研究车辆对轨迹的跟随能力,同时对行驶过程中车辆的安全、稳定性能进行要求;纵向运动控制则将重点放在对目标车速的跟踪或与前方车辆保持期望的距离。在单独进行横向运动控制方面:李寿涛等[6]设计滑模变结构控制策略对横摆角速度及质心侧偏角参量进行跟踪,实现车辆横向控制。Guo等[7]采用分层控制策略,首先基于自适应滑模控制律得到前轮转角和附加横摆力矩,然后采用线性二次型调节器(linear quadratic regulator,LQR)进行各轮转矩分配来实现对目标状态量的跟踪。Li等[8]基于道路环境信息,通过使用Sigmoid函数得到期望的偏航角与障碍物信息,然后采用非线性模型预测控制(nonlinear model predictive control,NMPC)算法对前轮转向角进行优化。以上横向运动控制方法主要将车辆状态量作为控制目标,忽略对轨迹跟踪精度的要求,虽提高了运动过程中的行驶稳定性,但未考虑轨迹约束条件。在纵向控制方面:Cao等[9]基于反馈线性化理论和滑模控制理论,设计了一种适用于车辆速度控制系统的滑模控制器,与传统的PID控制器相比,该控制器在参数和环境参数扰动下具有更好的鲁棒性和动态性能。Xiong等[10]提出一种考虑加速度需求的车速自适应巡航控制方法,该方法基于车辆纵向动力学模型,并使用条件积分方法设计耦合的车速和加速度控制律。目前大部分纵向运动控制所涉及的行驶工况较为简单,较少考虑车辆在横向加速度下的横纵向耦合特性。以上控制策略仅考虑车辆行驶过程中单一方向上的运动,即横向控制策略忽略纵向车速的变化对横向运动的影响、纵向控制策略未考虑到车辆转向的需求。而智能车辆作为典型的多输入-输出的复杂耦合系统,具有参数不确定及高度非线性等动态特性。单独的横向或纵向运动控制策略无法考虑到车辆的横纵向耦合特性。
考虑车辆动力学横纵向的耦合特性,一些学者对车辆横纵向运动进行协同控制。管欣等[11]在预瞄跟随模型的基础上,提出了一种以PD开环模型作为主校正模型、以BP神经网络PID进行补偿校正的复合矫正模型,实现了变车速情况下对轨迹的跟踪。Yu等[12]建立基于车辆坐标系下的横纵向误差方程,对误差方程简化后进行解耦,并基于此分别设计横纵向运动控制方法。Xie等[13]提出了一种基于模型预测控制(model predictive control,MPC)的横纵向综合控制方法:纵向控制器通过模型预测控制计算期望加速度和纵向速度,然后利用逆纵向动力学模型协调驱动和制动;横向控制器根据车辆状态量和纵向速度,求解车辆前轮转角,实现车辆的稳定控制。以上控制方法均未考虑到极限工况下的运动控制问题,而在本文中通过增加控制自由度条件如直接横摆力矩控制来解决这一问题。
针对以上问题,本文针对不同路面附着系数下的变车速轨迹跟随问题,考虑车辆横纵向动力学之间的关联关系,建立横纵向耦合的车辆三自由度动力学模型,然后将实际轨迹和期望轨迹的误差与前轮转角的增量设置为目标函数,并基于模型预测控制求解前轮转角;考虑横纵向轮胎力设计滑模函数,求得横摆力矩与总驱动转矩,并基于直接横摆力矩控制与规则转矩分配得到各轮转矩,使车辆安全稳定地跟踪期望轨迹。
1 车辆动力学建模
为了描述车辆动力学特性及车辆性能,建立考虑车辆纵向、横向及横摆运动的三自由度非线性车辆模型[14],如图1所示。

图1 车辆动力学模型Fig.1 Vehicle dynamics model
图1中,XOY为惯性坐标系,xoy为车辆坐标系。根据牛顿第二定律,分别得到车辆沿x、y轴的力平衡方程及绕z轴的力矩平衡方程:
(1)

(2)
式中:δf为前轮转角,它与方向盘转角δ的转换关系为δf=δ/isw,其中isw为车辆转向系统的传动比;δr为后轮转角;Flf、Flr分别为地面对前、后轮胎的纵向作用力;Fcf、Fcr分别为地面对前、后轮胎的横向作用力,其表达式如式(3)所示。
(3)
式中:Clf、Clr分别为前、后轮胎的纵向刚度;Ccf、Ccr分别为前、后轮胎的侧偏刚度;Sf、Sr分别为前、后轮胎在地面上的滑移率;αf、αr分别为前、后轮胎的侧偏角。为使建立的动力学模型能够用于后文的模型预测控制策略中,需要在准确描述车辆状态的前提下尽可能进行简化,以减少计算量。在小角度下,有如下近似条件:cosθ≈1,sinθ≈θ,tanθ≈θ。

(4)
2 车辆横、纵向协同控制策略
2.1 协同控制策略框图
本文所提出的控制策略如图2所示,其中横向控制策略采用模型预测控制算法跟踪期望轨迹;纵向控制策略采用滑模控制算法跟踪期望车速。在横向模型预测控制器中,除期望轨迹外,还将车辆状态量,如横纵向车速、横纵向位移、横摆角及横摆角速度一同作为输入、输出方向盘转角作用给车辆和纵向滑模控制器。纵向滑模控制器将期望车速与方向盘转角作为输入、输出整车合力矩。下层转矩分配器根据方向盘转角得到整车横摆力矩,然后采用基于规则的制动转矩分配方法得到各个车轮之间的转矩差值,最后结合整车合力矩得到各个车轮的驱动转矩。
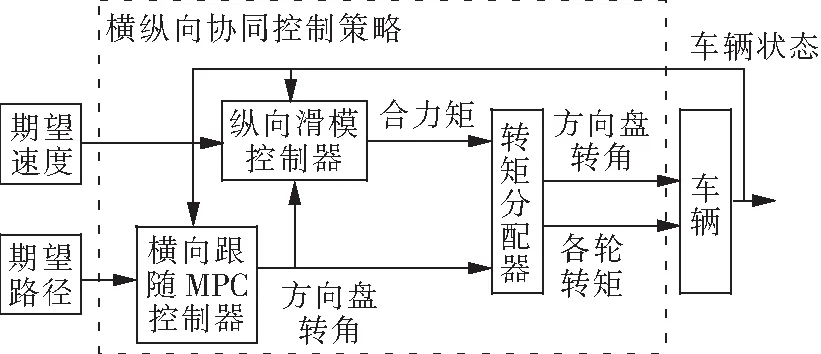
图2 智能车辆横纵向综合控制策略Fig.2 Integrated horizontal and longitudinal control strategy of intelligent vehicle
2.2 车辆横向运动控制器设计
由前文介绍的车辆动力学模型可以看出,在实际行驶过程中,车辆的横、纵向动力学之间存在耦合关系,其中车辆的纵向运动对车辆的横向运动有较大的影响。因此,本节设计的横向控制器考虑纵向车速的影响,将纵向车速作为横向控制系统的状态量,设计基于模型预测控制的车辆横向运动控制器[15]。MPC控制过程包括预测模型的建立与最小化目标函数的求解。在每个采样时刻,由车辆预测模型得到下一时刻车辆位置[16-18]。目标函数设定为轨迹偏差与转角增量的和,对目标函数求取极小值得到下一时刻的转角控制信号[19]。
2.2.1 预测模型建立
将前文提出的车辆非线性动力学模型转化为状态空间表达式:

(5)

首先对非线性动力学模型进行线性化:将式(5)在初始点[ξ0,u0]处进行泰勒展开,只保留一阶项得到线性时变方程为:
(6)
其中:A(t)与B(t)为系数矩阵,

采用一阶差商的方法将式(6)进行离散化处理,设第k时刻的状态量为ξ(k),第k时刻的控制量为u(k),由k时刻计算得到的k+1时刻的状态量记为ξ(k+1|k),得到离散的状态空间表达式如式(7)所示。
ξ(k+1|k)=Aξ(k)+Bu(k)
(7)
其中:A、B为系数矩阵,A=I+TA(t),B=TB(t),T为采样时间。
为方便控制车辆横向运动,设计MPC控制器的输出量为前轮转角增量。将控制增量作为系统输入量,则得到新的状态空间表达式如式(8)所示。
(8)

设计系统的预测时域为Np,控制时域为Nc,且满足Nc≤Np。则在k时刻,将k+1,k+2,…,k+Np预测时域内的输出量以矩阵形式表示为:
(9)

2.2.2 优化求解与反馈
为使每个时刻优化函数能够得到满足约束的可行解,在优化目标中加入松弛因子ε及权重系数Q、P、ρ[20],建立目标函数J如式(10)所示。
(10)
其中:η(k+i|k)为根据第k时刻计算得到的第k+i时刻的系统输出量,ηref(k+i)为第k+i时刻的期望轨迹坐标,Δu(k+i|k)为根据第k时刻计算得到的第k+i时刻的系统控制增量。
目标函数的目的是使系统能够尽快且平稳地跟踪期望轨迹。式中第1项反映系统对参考轨迹的跟随能力,第2项反映对控制量平稳变化的要求。在实际控制过程中需加入控制量、状态量等的约束条件。为使用求解二次规划的方法求解目标函数,将目标函数整理为二次型表达式为:

(11)

加入车辆行驶过程中的动力学约束条件,将模型预测控制策略在每一时刻的约束下求解最优控制量的问题转化为求解如下的二次规划问题:
(12)

ΔU*(k)=[Δu*(k) Δu*(k+1|k)…Δu*(k+
Nc-1|k)]T
(13)
其中:Δu*(k)、Δu*(k+1|k)…Δu*(k+Nc-1|k)分别为通过计算得到的k、k+1…k+Nc-1时刻的控制输入增量。将增量序列的第1个元素作为实际输入增量作用于控制器中,实现控制过程中的滚动优化:
u(k)=u(k-1)+Δu*(k)
(14)
2.3 纵向控制策略
为使智能车辆在跟踪期望轨迹的同时保持匀速或进行平稳的加减速运动,需对设计车辆纵向运动控制器[21]。滑模变结构控制对非线性系统的不确定性有良好的处理效果,鲁棒性强,所以本文基于滑模控制设计纵向控制器[22]。
将纵向车速的跟踪误差设置为滑模切换函数svx:
svx=vx-vxd
(15)

由式(1)、式(2)可得到:
(16)

对式(15)求导并将式(16)代入可得:
(17)

(18)

(19)
结合式(17)与式(19)得车辆合力矩可表示为:

(20)
2.4 转矩分配策略
为进一步实现车辆转向,采用直接横摆力矩控制方法。在控制纵向合力的基础上,对车辆需求的横摆力矩进行计算。同样采用滑模控制原理,将滑模函数sωz设定为横摆角速度的跟踪误差:
sωz=ωz-ωzd
(21)
其中ωz为实际横摆角速度;ωzd为期望横摆角速度,则有:

(22)
其中Db为轮距;Mzc为车辆横摆力矩。指数趋近率采用饱和函数:
(23)
得车辆横摆力矩表达式为:

(24)
为满足车辆横向运动的横摆力矩,本文使用传统方式通过控制各轮的制动力满足车辆行驶要求,本文在4种不同工况下对车辆转矩进行规则分配,4种工况分别如下。向左(右)转向不足工况:即|ωz|<|ωzd|,为了补偿转向不足,所需横摆力矩朝向内侧,内后轮作为主制动轮,内侧其他车轮作为次制动轮;向左(右)转向过度工况:即|ωz|<|ωzd|,为了克服转向过度,所需横摆力矩朝向外侧,外前轮作为主制动轮,外侧其他车轮作为次制动轮。
向左转向不足工况:
(25)
(26)
向右转向不足工况:
(27)
(28)
向左转向过度工况:
(29)
(30)
向右转向过度工况:
(31)
(32)
3 横纵向运动协同控制试验分析
本节通过仿真试验验证本文所提出的横纵向协同控制策略的有效性。其中MPC的控制参数设计如下:采样周期T设为0.02 s;预测时域步数Np与控制时域步数Nc分别设置为30、20;方向盘转角δ在-540°~540°范围内;单个采样周期内方向盘转角增量Δδ在-0.34°~0.34°范围内;转向系统传动比isw设为20;横向位移Y约束在-3.75~3.75 m范围内;车辆横摆角φ约束在-12°~12°范围内;松弛向量因子ε设为0.003,权重因子ρ设为1 000,权重矩阵Q设为diag(50,50),权重矩阵R设为500 000。
3.1 试验1:高附着路面实验
设置初始车速为80 km·h-1,1 s以后以0.5 m·s-2的速度减速行驶,期望轨迹为双移线,路面附着系数为1,实验结果如图3所示。
由图3(a)可以看出车辆对期望轨迹的跟随效果较好,且该控制策略下的车辆行驶轨迹较为平滑。由图3(b)可以看出车辆行驶速度曲线与期望速度曲线重合,即车辆在第1 s内保持匀速行驶,之后以每秒0.5 m·s-2的减速度行驶,行驶至10 s时匀速行驶。由图3(c)、(d)可以看出,行驶过程中每个时刻的方向盘转角增量值不超过4°,方向盘转角幅值不超过40°。由图3(e)、(f)可以看出车辆的横摆角速度较小,质心侧偏角与质心侧偏角变化率曲线收敛,车辆行驶过程稳定。综上,本文提出的横纵向协同控制策略能够控制车辆在变速情况下跟随期望的轨迹,并且能够满足车辆行驶过程中安全稳定的要求。

纵向位移/m(a) 车辆轨迹跟踪效果

t/s(b) 行驶车速
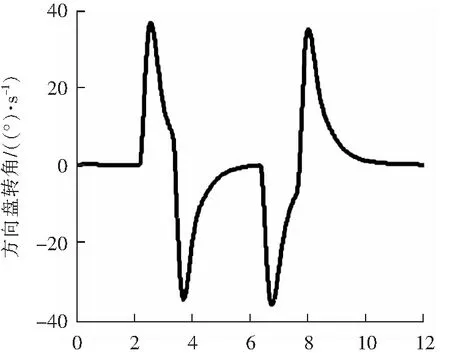
t/s(c) 方向盘转角

t/s(d) 方向盘转角增量

t/s(e) 横摆角速度

质心侧偏角/(°)(f) 质心侧偏角及其变化率图3 高附着路面下的车辆状态Fig.3 Vehicle status under highly attached road surface
本文提出的控制策略下各轮输出转矩如图4(a)、(b)所示,可以看出,在车辆直线行驶时,四轮转矩为平均分配,在左转弯时刻右侧车轮转矩增加,左侧车轮转矩减小,在右转弯时则相反,符合在行驶过程中车轮的转矩变化情况。在转矩分配过程中,本文提出的控制策略能够根据车辆状态有效地分配各轮转矩来满足行驶需求。车辆前进过程中所需的合力矩与横摆力矩如图4(c)、(d)所示,合力矩由4轮转矩共同提供给车辆,横摆力矩由4轮转矩的差值产生。从图4(c)可以看出,在车辆减速过程中,合力矩减小;在停止减速后,合力矩增大至原值;横摆力矩用于控制车辆转向,因此在车辆直线行驶过程中,横摆力矩为0,在车辆换道过程结束时横摆力矩达到最大值。

t/s(a) 前轮转矩

t/s(b) 后轮转矩

t/s(c) 整车合力矩

t/s(d) 方向盘转角增量图4 高附着路面下车轮转矩与整车力矩Fig.4 Torque of wheels and vehicle under highly attached road surface
3.2 试验2:低附着路面实验
设置初始车速为50 km·h-1,1 s以后以0.5 m·s-2的速度减速行驶,期望轨迹为S曲线,路面附着系数为0.4,实验结果如图5所示。
图5(a)中可看出在变速行驶的过程中,车辆的实际行驶轨迹仍能够跟随期望轨迹。由图5(b)可以看出,车辆实际车速与期望车速曲线一致,即本文提出的控制策略在低附着路面上也能满足速度变化的要求。图5(c)中方向盘转角幅值不超过30°,满足车辆稳定性要求。图5(d)与图3(d)中方向盘转角增量均小于4°,这体现了控制策略在不同的行驶工况下对转角增量的控制均有较好效果,且由于车速降低,导致图5(d)中方向盘的转角增量小于图3(d)中方向盘的转角增量。图5(e)、(f)的横摆角速度幅值小于5°,质心侧偏角幅值小于0.4°,且质心侧偏角与质心侧偏角变化率曲线收敛,这表明在低附着路面工况下,车辆行驶稳定。

纵向位移/m(a) 车辆轨迹跟踪效果

t/s(b) 行驶车速

t/s(c) 方向盘转角

t/s(d) 方向盘转角增量
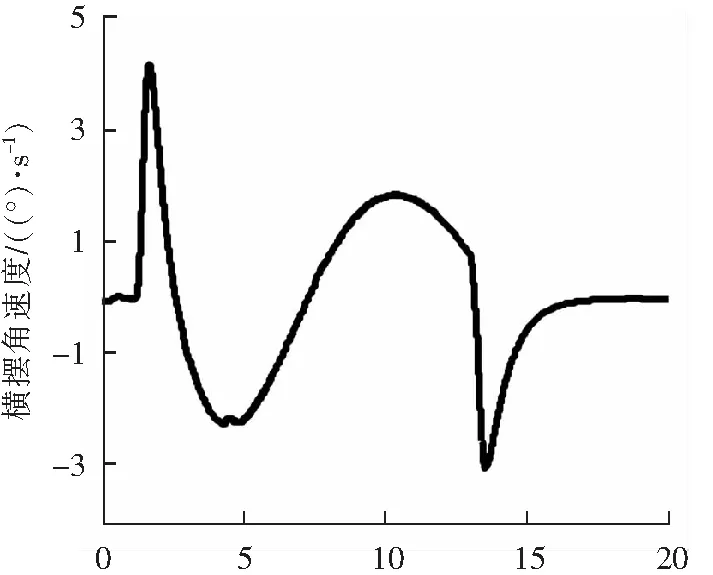
t/s(e) 横摆角速度

质心侧偏角/(°)(f) 质心侧偏角及其变化率图5 低附着路面下的车辆状态Fig.5 Vehicle status under low adhesion road
在此工况下各轮输出转矩如图6(a)、(b)所示,可以看出,在低附着路面上,车辆仍可根据具体的行驶工况下进行转矩的分配,完成对目标轨迹的跟踪。车辆前进过程中的合力矩与横摆力矩如图6(c)、(d)所示,合力矩在车速降低时减小,在匀速行驶时保持不变。横摆力矩在车辆转向过程中不断变化,最大值出现在车辆开始转S弯与S弯结束回到原车道时。
4 结论
本文以智能车辆作为研究对象,在不同路面附着系数下,对变车速下的车辆轨迹跟随控制稳定性进行研究,提出一种基于模型预测控制与滑模控制的车辆横纵向协同控制策略。在不同路面附着系数下的变速轨迹跟随试验中,本文所提出的控制策略能够满足对期望轨迹与期望速度的要求,并能根据不同工况进行对应的转矩分配,且每一时刻方向盘转角增量小于5°,质心侧偏角与质心侧偏角变化率曲线收敛,这说明在该控制策略下,车辆在变速时仍能够安全、平稳的跟踪期望轨迹。
t/s(a) 前轮转矩

t/s(b) 后轮转矩

t/s(c) 整车合力矩

t/s(d) 整车横摆力矩图6 低附着路面下车轮转矩与整车力矩Fig.6 Torque of wheels and vehicle under low adhesion road
