Modeling and Trajectory Tracking Control for Flapping-Wing Micro Aerial Vehicles
2021-04-14WeiHeSeniorMemberIEEEXinxingMuLiangZhangandYaoZou
Wei He, Senior Member, IEEE, Xinxing Mu, Liang Zhang, and Yao Zou
Abstract—This paper studies the trajectory tracking problem of flapping-wing micro aerial vehicles (FWMAVs) in the longitudinal plane. First of all, the kinematics and dynamics of the FWMAV are established, wherein the aerodynamic force and torque generated by flapping wings and the tail wing are explicitly formulated with respect to the flapping frequency of the wings and the degree of tail wing inclination. To achieve autonomous tracking, an adaptive control scheme is proposed under the hierarchical framework. Specifically, a bounded position controller with hyperbolic tangent functions is designed to produce the desired aerodynamic force, and a pitch command is extracted from the designed position controller. Next, an adaptive attitude controller is designed to track the extracted pitch command, where a radial basis function neural network is introduced to approximate the unknown aerodynamic perturbation torque. Finally, the flapping frequency of the wings and the degree of tail wing inclination are calculated from the designed position and attitude controllers, respectively. In terms of Lyapunov’s direct method, it is shown that the tracking errors are bounded and ultimately converge to a small neighborhood around the origin. Simulations are carried out to verify the effectiveness of the proposed control scheme.
I. INTRODUCTION
BIOMIMETIC robots are popular research subjects in many fields of robotics [1]-[3]. In recent decades,flapping-wing micro aerial vehicles (FWMAVs), as a type of innovative flying robots, have received considerable attention in the aviation community [4], [5]. Characterized by good agility, ability for concealment and high flight efficiency, they have extensive potential applications in military and civil fields including disaster investigation, intelligence collection,anti-terrorism reconnaissance and so forth [6], [7]. The research of the FWMAVs is comprehensive and integrates multiple disciplines, e.g., control, computer science,mechanics and informatics, etc.
Researchers have made great efforts in developing FWMAVs over the past few years [8], [9]. By imitating different creatures, FWMAVs are generally categorized into insect-scale micro aerial vehicles (MAVs) and bird-scale micro aerial vehicles (MAVs). Currently, typical representatives of the insect-scale FWMAVs are the “Robobee” [4] and“nano hummingbird” [10 ]. Wood’s team from Harvard University invents an insect-scale FWMAV “Robobee” by using high-performance piezoelectric actuators, and such an FWMAV is capable of hovering at a fixed height [4].However, “Robobee” cannot be powered sufficiently for longduration maneuvers by the limitation of load capacity.AeroVironment, Inc. develops an insect-scale FWMAV “nano hummingbird” [10], which can finish some specific tasks. e.g.,vertical take-off and landing, hovering, free flight forward and backward. For the bird-like FWMAVs, researchers first built a bat-like “Bat Bot2” by imitating the limb structure and flight mode of a bat [11]. To facilitate the flight, “Bat Bot2” adopts a boundary control method to make its wings flutter in accordance with the desired trajectory. Festo designs a lightweighted bird-like FWMAV “Smartbird” by taking a streamlined shape and wing twist into account, which is able to fly stably by remote control [12]. He’s team from the University of Science and Technology Beijing developed a bird-like FWMAV “USTBird” driven by 2 servo motors,which changes course by asymmetric flapping of its wings.Although these FWMAVs show good flight performance,having an autonomous flight mode is not taken into account.
To achieve autonomous flight, it is crucial to determine the driving behaviors of the FWMAVs. For the insect-scale MAVs, a flapping frequency is set to around 20-600 Hz for providing sufficient thrust to allow them to hover [13]. To adjust their flight attitude, they are generally steered by fluttering the wings asymmetrically [14]. The flapping frequency of most bird-like MAVs is below 10 Hz for level flight. Their lift mainly results from the aerodynamic force generated by the forward flight speed, and in the meantime,their flight orientation is altered by adjusting both the flapping and tail wings [15]. For dynamic analysis and modeling, the power curves associated with different flight modes and speeds of several certain species have been extracted in [16],[17]. Meantime, some relevant analysis has been given therein. In addition, the leading-edge vortex effect on the tail wing in the aerodynamic performance has been formulated in[18]. Besides, the external disturbances have an important influence on the performances of FWMAVs and is considered in practice [19], [20]. In this paper, we focus on the modeling of bird-like FWMAVs, which is characterized by nonlinearity,parametric coupling, and uncertainty.
Many intelligent methods have been developed and applied in various fields [21]-[24], and many control approaches are applied in the FWMAVs to achieve autonomous flight[25]-[27]. In [25], a DelFly Explorer equipped with a 0.98 gram autopilot unit and a 4.0 gram onboard stereo vision system is established, and a stereo vision algorithm is developed to achieve autonomous obstacle avoidance. In [28],the location of the trailing edges at the wing roots is adjusted to generate control torques through an angular rate feedback control scheme for the insect-scale tailless FWMAV, which achieves stable vertical flight and hovering. In [26], the authors propose a hybrid control policy which combines model-based nonlinear control with model-free reinforcement learning. The model-free reinforcement learning policy is trained to accomplish fast evasive maneuvers on the hummingbird robot. In [27], neural network based control strategies with full state and output feedback are developed for the attitude and position tracking of the FWMAV. In particular, a model-based nonlinear controller based on hybrid control strategy is proposed therein to guarantee the stability of the closed-loop FWMAV system.
Although multiple mathematical models and control strategies have been proposed for the FWMAVs, most of them just consider aerodynamic force and torque as control inputs and do not establish their aerodynamic relationship with respect to actual physical actuators. Therefore, it is important to use these control strategies in practice for reliable flight. In this paper, we develop a bird-like FWMAV, which has 2 degrees of freedom (DOFs) of flapping frequency and tail wing inclination to achieve automatous trajectory tracking on the vertical plane. It is important to formulate the relationship of the aerodynamic force and torque with respect to flapping frequency and tail wing inclination for real applications.Moreover, we also consider the airflow effect of flapping wings in the aerodynamics of the tail wing in the modeling of the FWMAVs. Based on the established model, a neural network control scheme is proposed under the hierarchical framework such that trajectory tracking of the FWMAV on the longitudinal plane is achieved. Specifically, a position controller with control input saturation in [29] is synthesized,and the frequency of flapping wings and a pitch command are extracted from the synthesized position controller. Further, an attitude controller is synthesized by introducing a radial basis function neural network for the pitch to track commands,where the neural network is used to eliminate the aerodynamic effect caused by the airflow of flapping wings. Finally, the tail wing inclination is extracted from the synthesized attitude controller. With Lyapunov’s direct method, it is shown that tracking errors driven by the proposed control scheme are bounded and ultimately converge to a neighborhood around the origin. The main contributions of this paper are enumerated as follows:
1) This paper formulates the aerodynamic force and torque generated by the actual flapping frequency of flapping wings and tail wing inclination when constructing the system model of the FWMAV. Moreover, a hierarchical framework is introduced to exploit the cascaded structure of the established model for control scheme development.
2) This paper considers the unknown aerodynamic perturbation of flapping wings on the torque generated by the tail wing. A radial basis function neural network is introduced to estimate and compensate for this perturbation and for improving tracking accuracy.
3) This paper designs a bounded position controller with hyperbolic tangent functions to guarantee a bounded aerodynamic force. Also, this design effectively alleviates the coupling between the closed-loop position and attitude error systems, and thus facilitates the stability analysis greatly.
The remaining sections of this paper are organized as follows. Section II states the model and control objective of the FWMAV. Section III presents the main results of this paper including the control scheme development and the stability analysis. Section IV performs simulations to validate and highlight the performance of the proposed control scheme. Finally, Section V makes conclusions and draws future works.
II. PROBLEM STATEMENTS
A. System Models
Generally, an FWMAV is modeled in three reference frames (shown in Fig. 1) as follows:
Inertia frame: Si= oixiyizig , origin oiis fixed at a point on the ground, axes xiand zipoint to the north and east, and axis yiis determined by the right hand rule.
Track frame: St= otxtytztg, origin otis located at the center of mass (c.m.) of the fuselage, axis xtis along the velocity direction, axis ztis perpendicular to the plane containing axis xtand pointing to the right, and axis ytis determined by the right hand rule.
Body frame: Sb= obxbybzbg, origin obcoincides with ot,axis xbpoints towards the head, axis zbis perpendicular to the plane of symmetry containing axis xband points to the right,and axis ybis determined by the right hand rule.

Fig. 1. Reference frames of a typical FWMAV.
For the convenience of modeling, some reasonable assumptions are made as follows:
Assumption 1: The aerodynamic force of the tail wing and the torque generated by the drag of the tail wing are so small that it is negligible.
Assumption 2: The increments of thrust and lift are proportional to the flapping frequency.
Remark 1: Studies in [18], [30] indicate that the bird’s tail has nearly no effect on lift and drag. By considering the short arm with respect to c.m., the torque generated by the drag of the tail wing can be negligible. However, the lift generated by the tail wing still contributes to the pitch torque arising from its long arm with respect to c.m.. Generally, the aerodynamic force of the FWMAV is related to the flapping frequency[31]-[33]. There exists almost a linear relationship between the flapping frequency and the average of lift, and the thrust is almost proportional to the flapping frequency [34]. In this paper, the FWMAV’s tail is designed with a biological tail structure, therefore, Assumptions 1 and 2 are reasonable.
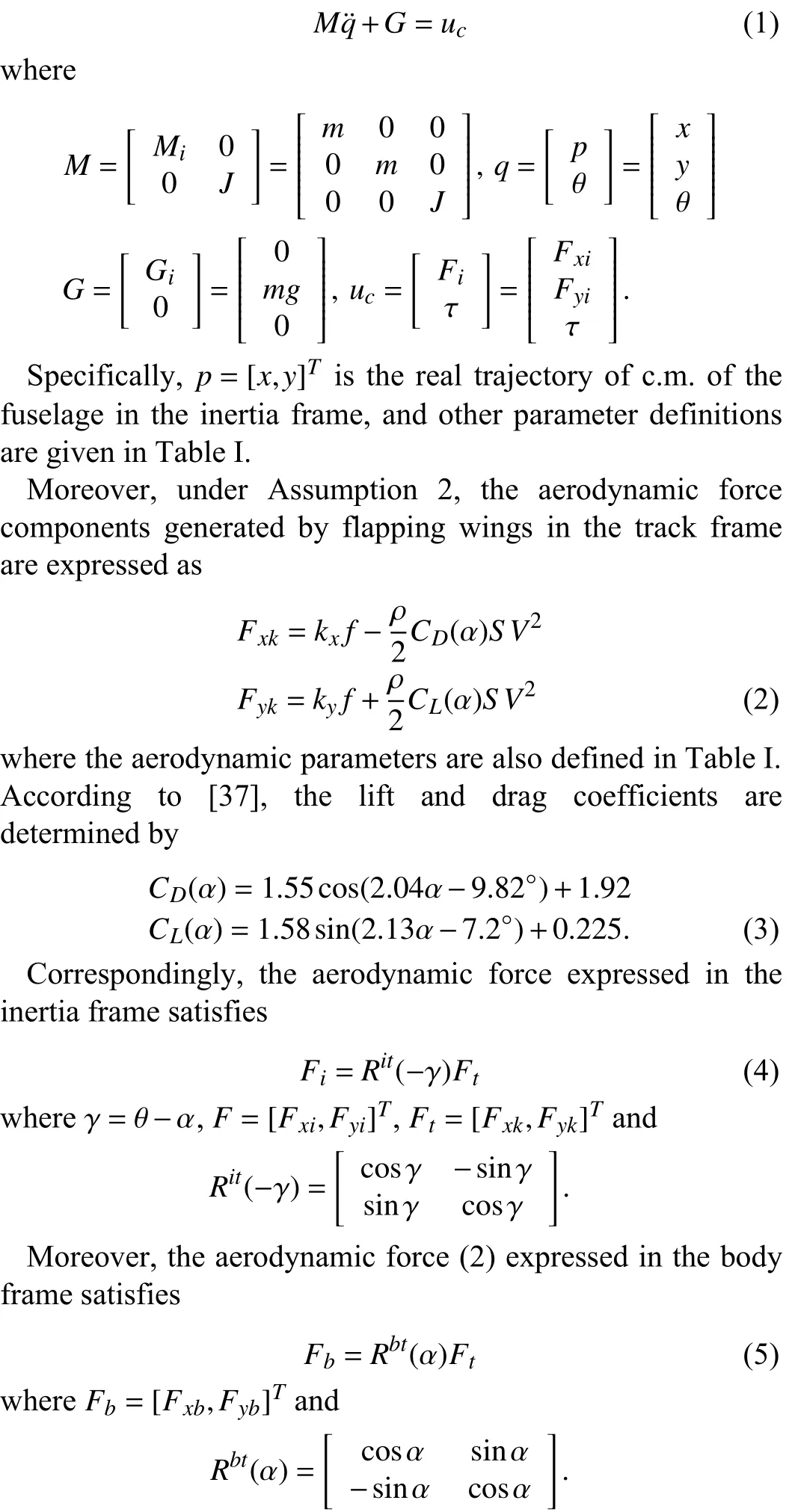
Under Assumptions 1 and 2, and according to Newton’s second law, the longitudinal motion of the FWMAV can be formulated as follows [35], [36]:
In addition, the aerodynamic force of the tail wing, which isperpendicular to the body axis on the plane of symmetry of the tail wing, is expressed as this paper, the aerodynamic perturbation δis assumed to be unavailable and is approximated by a neural network.

TABLE I MODEL PARAMETER DEFINITIONS

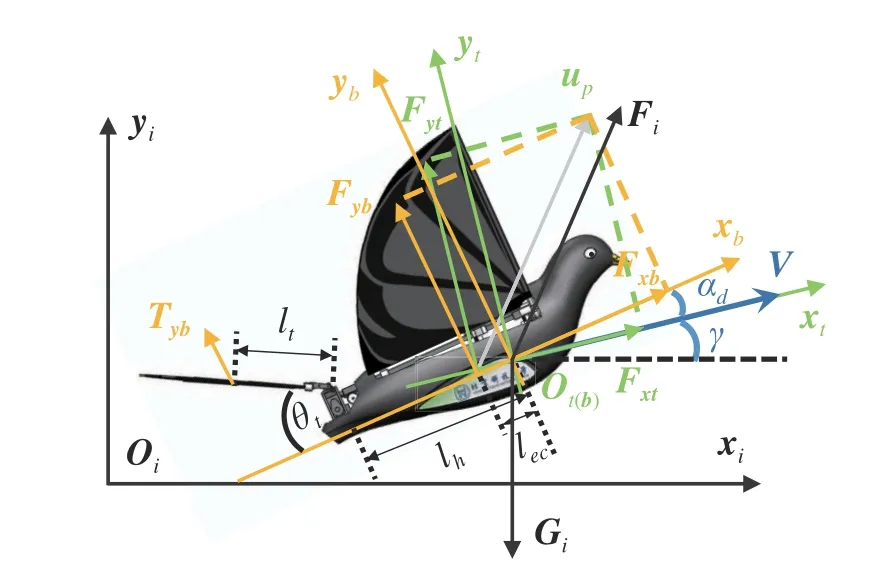
Fig. 2. Aerodynamic force analysis diagram.
B. Control Objective
In this paper, we focus on the solution to the trajectory tracking control problem of the FWMAV on the longitudinal plane. In particular, given a reference trajectory pd=[xd,yd]T,we intend to design flapping frequency f and tail wing inclination θtvia an adaptive control scheme such that limt!1jp(t)-pd(t)k ≤ϵ , where ϵ >0 is a sufficiently small constant. Since the FWMAV system (1) is of a cascaded structure consisting of an outer position loop and an inner attitude loop (see Fig. 3 for illustration), the control scheme design is under a hierarchical framework such that the position and attitude loops are studied in sequence. Also, note from (7) that, the pitch torque τ is subject to an unknown aerodynamic perturbation δ. We introduce a neural network technique to approximate and compensate for these perturbations which improves tracking accuracy [39]-[41].

Fig. 3. Cascaded structure of the FWMAV system.
III. MAIN RESULTS
In this section, an adaptive control scheme under the hierarchical framework is developed to solve the concerned tracking control problem of the FWMAV. In particular, a position controller with input saturations is synthesized for position tracking to pd. Then, the flapping frequency f and the pitch command θdare extracted from the synthesized position controller. Next, the attitude controller introducing the neural network adaptation is synthesized for attitude tracking to θd. Finally, the tail wing inclination θtis extracted from the synthesized attitude controller. Besides these, a detailed stability analysis is also performed.
A. Position Controller Synthesis
Define p1=p and p2= p˙. It follows from (1) that


B. Attitude Controller Synthesis
Define θ1=θ and θ2= θ˙. Based on (1) and (7), their dynamics are derived as
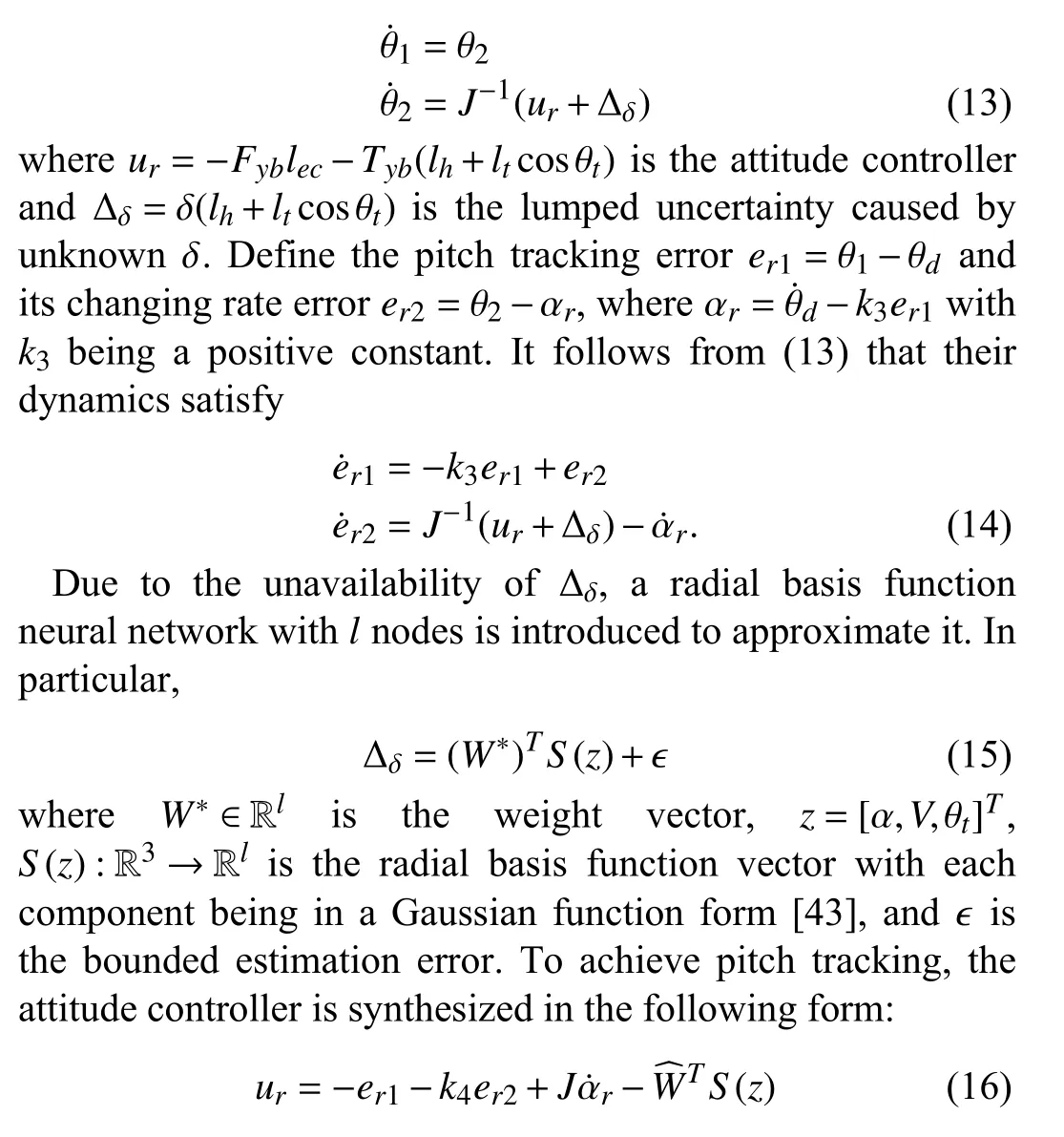

Fig. 4. Block diagram of control scheme.

C. Stability Analysis
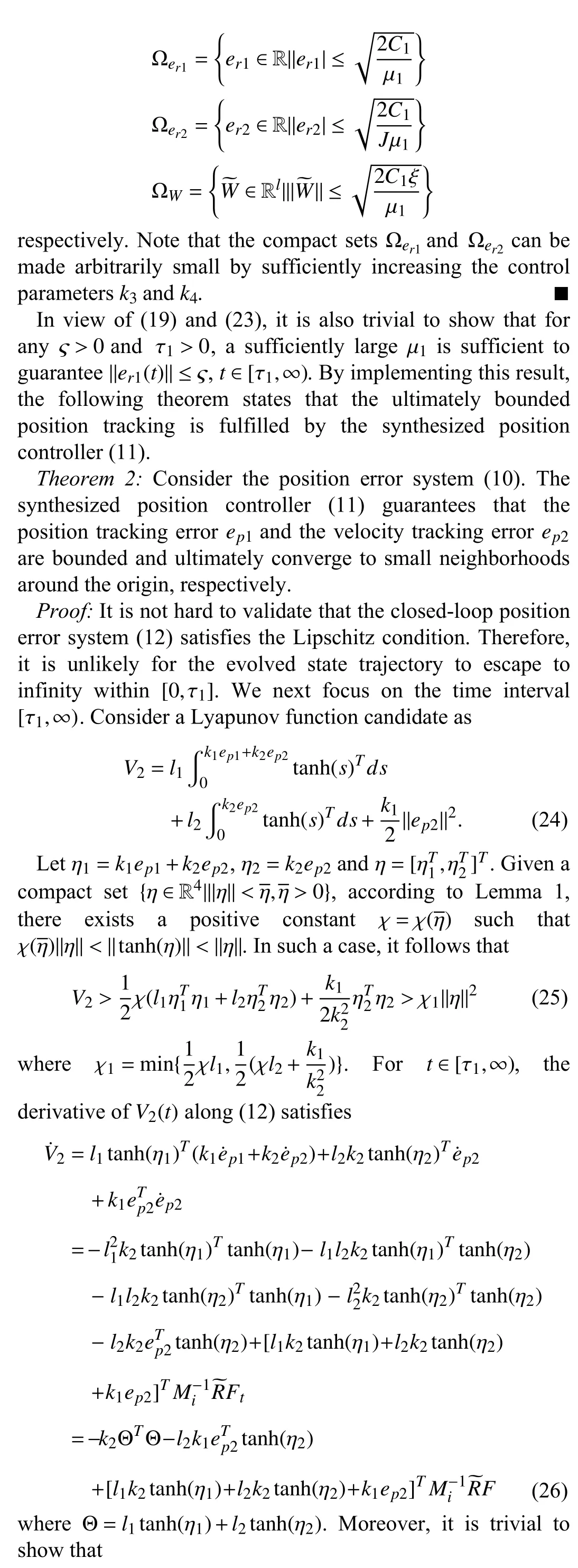
In this subsection, we focus on the stability analysis of the closed-loop system (12) and (18), which is examined to be of a cascaded structure. We carry out the analysis based on a hierarchical framework. In particular, we show that the attitude tracking error is bounded and ultimately converges to a small neighborhood of origin. Further, we show that the position tracking error is also bounded and ultimately converges to a small neighborhood of origin. Moreover, these neighborhoods can be tuned arbitrarily small by adjusting the control parameters. Before proceeding with the main results, a useful lemma is presented.

The next theorem indicates that the ultimately bounded attitude tracking is achieved with the synthesized attitude


IV. SIMULATIONS
In this section, simulations are undertaken to validate the proposed control scheme. Consider an FWMAV with its physical parameters listed in Table II. It is commanded to track a reference trajectory in the following form:
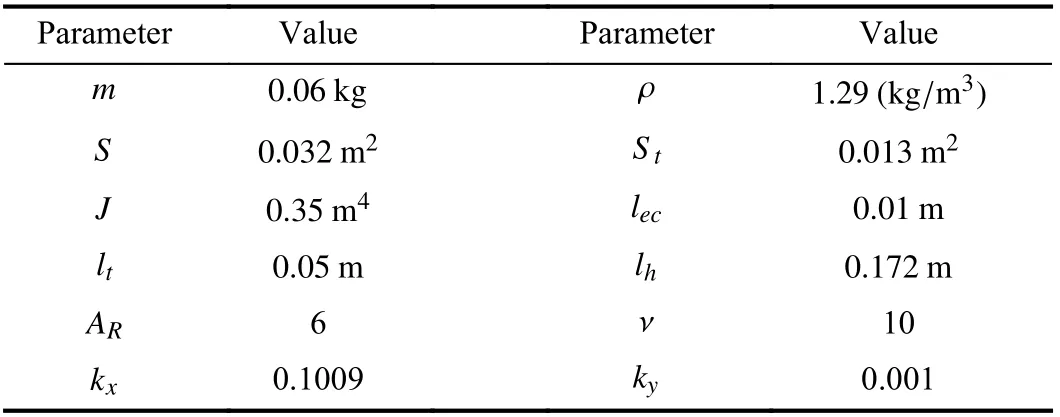
TABLE II PHYSICAL PARAMETERS

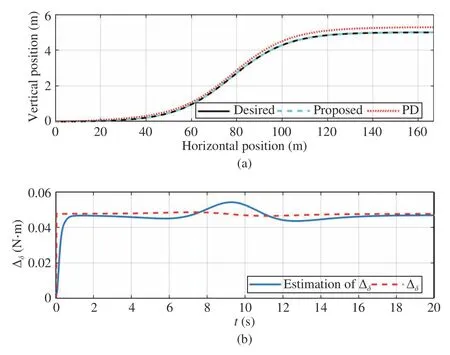
Fig. 5. Position tracking by the PD and the proposed control and the estimation of perturbation torque Δδ.
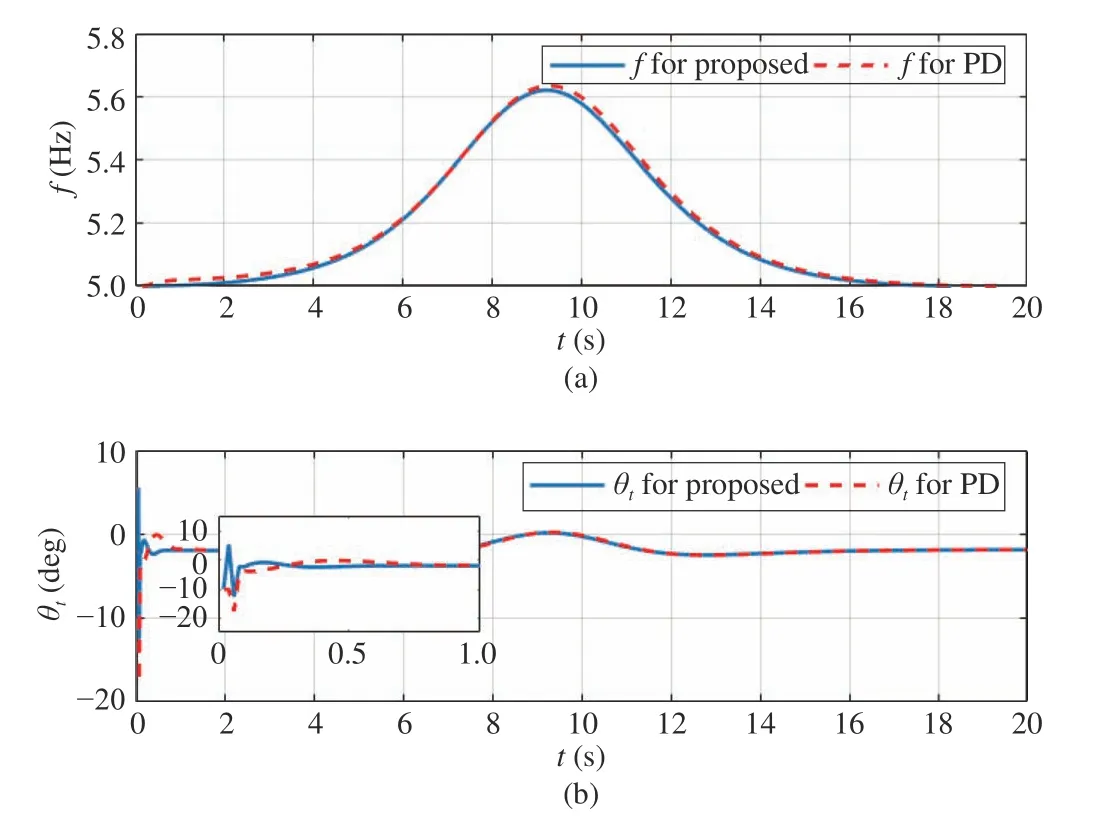
Fig. 6. Control inputs of the PD and the proposed control.
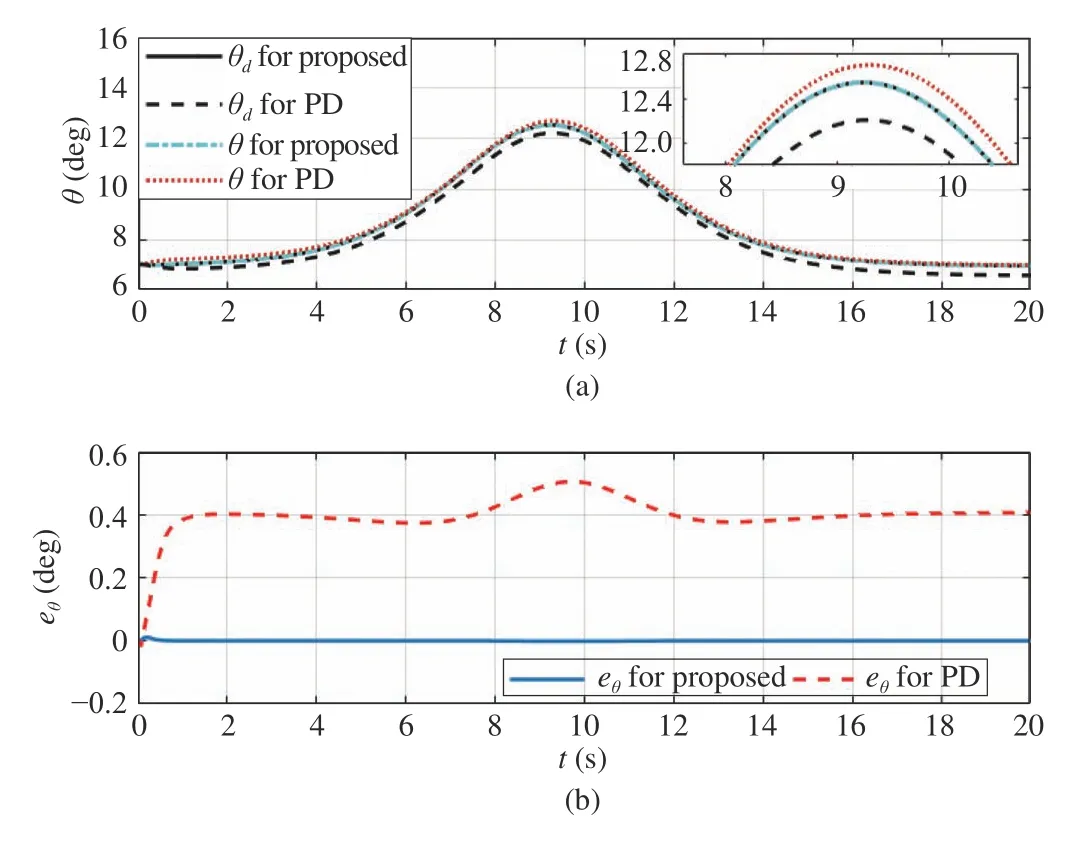
Fig. 7. Attitude tracking by the PD and the proposed control and the tracking errors.
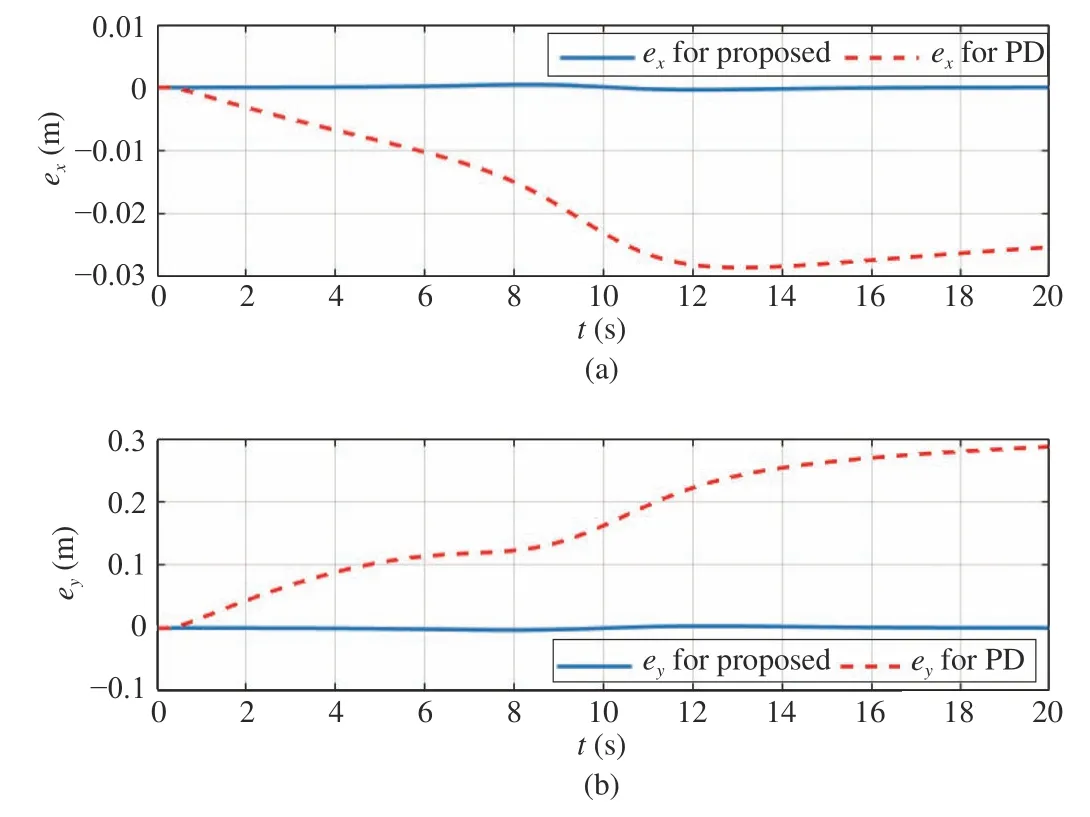
Fig. 8. Position tracking errors by the PD and proposed control.
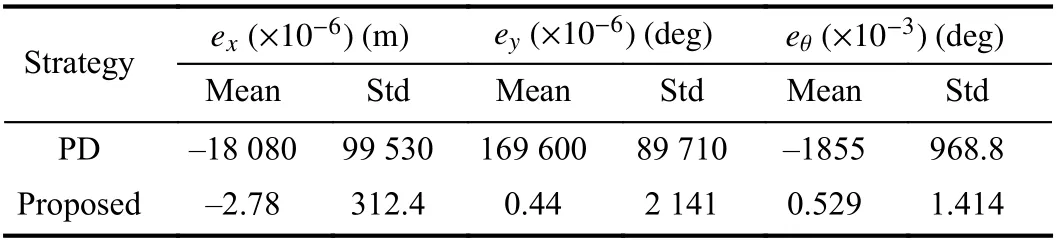
TABLE III PERFORMANCE COMPARISON
V. CONCLUSION
In this paper, the trajectory tracking problem of FWMAVs is studied on the longitudinal plane. The system model is established by formulating the aerodynamic force and torque generated by flapping wings and the tail wing. A neural network based control scheme is proposed in terms of a hierarchical framework. In particular, a saturated position controller is developed for position tracking, which guarantees a bounded aerodynamic force. Then, the flapping frequency of flapping wings and a pitch command are extracted from the position controller. Subsequently, an adaptive attitude controller is designed for the pitch to track the command controller, and a radial basis function neural network is implemented to approximate the aerodynamic perturbation torque. It is demonstrated that the tracking errors are bounded and ultimately converge to a small neighborhood around origin.
In the future, we will extend the proposed tracking control scheme for longitudinal motion to a general three-dimensional case with both longitudinal and lateral motions. Also, we will apply the proposed control scheme to a practical FWMAV platform for verification.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- A Multi-Layered Gravitational Search Algorithm for Function Optimization and Real-World Problems
- Dynamic Hand Gesture Recognition Based on Short-Term Sampling Neural Networks
- Dust Distribution Study at the Blast Furnace Top Based on k-Sε-up Model
- A Sensorless State Estimation for A Safety-Oriented Cyber-Physical System in Urban Driving: Deep Learning Approach
- Theoretical and Experimental Investigation of Driver Noncooperative-Game Steering Control Behavior
- An Overview of Calibration Technology of Industrial Robots