Towards a Theoretical Framework of Autonomous Systems Underpinned by Intelligence and Systems Sciences
2021-04-14YingxuWangSeniorMemberIEEEMingHouSeniorMemberIEEEKonstantinosPlataniotisFellowIEEESamKwongFellowIEEEHenryLeungFellowIEEEEdwardTunstelFellowIEEEImreRudasFellowIEEEandLjiljanaTrajkovicFellowIEEE
Yingxu Wang, Senior Member, IEEE, Ming Hou, Senior Member, IEEE, Konstantinos N. Plataniotis, Fellow, IEEE,Sam Kwong, Fellow, IEEE, Henry Leung, Fellow, IEEE, Edward Tunstel, Fellow, IEEE,Imre J. Rudas, Fellow, IEEE, and Ljiljana Trajkovic, Fellow, IEEE
Abstract—Autonomous systems are an emerging AI technology functioning without human intervention underpinned by the latest advances in intelligence, cognition, computer, and systems sciences. This paper explores the intelligent and mathematical foundations of autonomous systems. It focuses on structural and behavioral properties that constitute the intelligent power of autonomous systems. It explains how system intelligence aggregates from reflexive, imperative, adaptive intelligence to autonomous and cognitive intelligence. A hierarchical intelligence model(HIM) is introduced to elaborate the evolution of human and system intelligence as an inductive process. The properties of system autonomy are formally analyzed towards a wide range of applications in computational intelligence and systems engineering. Emerging paradigms of autonomous systems including brain-inspired systems, cognitive robots, and autonomous knowledge learning systems are described. Advances in autonomous systems will pave a way towards highly intelligent machines for augmenting human capabilities.
I. INTRODUCTION
AUTONOMOUS systems (AS) are an advanced intelligent system for implementing complex cognitive abilities in machines aggregating from reflexive, imperative, and adaptive intelligence to autonomous and cognitive intelligence [1]-[7].The ultimate aim of AS is to implement a brain-inspired system that may think and work with a human counterpart in a hybrid system without imperative instructions. Various AS have been demanded to address the pertinacious challenges to AI due to lack of cognitive, intelligent, computational,systematic, and mathematical readiness for a wide range of real-time and mission-critical applications [1]-[3], [6].
AS research in early AI, robotics, and control theories has focused on human-system interactions in an intelligent system where humans are in-the-loop cooperating with intelligent machines [2]. Defence Research and Development Canada refers to an AS to be a system that “exhibits goal-oriented and potentially unpredictable and non-fully deterministic behaviors [7].” In the basic research of intelligence and systems sciences, the field of AS investigates intelligent systems for realizing advanced human intelligence by computational systems and neural networks [1], [3], [6],[8]-[26], which embodies high-level machine intelligence beyond those of imperative and adaptive systems with deterministic or prescriptive behaviors. A study of the mechanisms of autonomous organization in social networks[23] identified that social organization is a field of AS where collective intelligence plays a centric role in social computing.
In the past 60 years of AI and systems engineering, few full AS were developed, because the theoretical foundations for autonomous intelligence and systems were not sufficiently mature [1], [10], [18], [27]-[29]. It is found that the classic mathematical means of logic, numerical methods, probability,and analytics was inadequate to deal with the entities in the brain (see Fig. 1), because they have been out of the domain of real numbers (R) [27], [30]. Many AI systems are still bounded by the intelligence bottleneck of adaptive mechanisms where machine intelligence is constrained by the lower-level reflexive, imperative, and deterministic intelligent abilities [24], [25], [28]. Therefore, it is a fundamental challenge to explore a roadmap to extend the intelligence power of current AI systems towards a highly autonomous level of natural intelligence.

Fig. 1. Fundamental cognitive entities represented in the brain.
This work explores the nature and a theoretical framework of AS. A survey of the architecture of intelligence science underpinning AS is introduced in Section II in order to explain the expected type of intelligent power for AS. Then, a theoretical framework of AS is developed in Section III for elaborating the generation of system autonomy and the role of human intelligence in hybrid AS. Section IV derives a set of principles and properties of AS. The relationship between AS and humans in hybrid systems is explained. Paradigms of AS demonstrated in Section V include brain-inspired systems,cognitive robots, and autonomous knowledge learning systems towards smart engineering applications and the emerging hybrid human-machine systems and societies. An index of mathematical symbols and notations used in this paper is provided in the Appendix.
II. RELATED WORK AND KEY CONCEPTS
Intelligence is the paramount cognitive ability of humans that may be mimicked by AS implemented by computational intelligence. Intelligence science studies the general form of intelligence, formal principles and properties, as well as engineering applications [8], [10], [20], [21], [24], [25], [28].Typical emerging AS are unsupervised computational intelligence, cognitive systems, brain-inspired systems, general AI,cognitive robots, unmanned systems, human intelligence augmentation systems, and intelligent IoTs [1]-[6], [11], [12],[16], [22]-[36]. Several AS projects undertaken in our labs address abstract intelligence [24], intelligent mathematics for AS [30], a tripartite framework of trustworthy AS [3],autonomous decision making [31], a transdisciplinary theory for cognitive cybernetics, humanity, and systems science [4],cognitive foundations of knowledge science [33], and the abstract system theory for AS [5].
The exploration of the cognitive and intelligent foundations of AS has shown a wide range of theoretical preparations and engineering paradigms. We introduce a formal description of fundamental AS concepts and notations in order to provide a coherent platform for elaborating the essences of AS and the differences between AS and nonautonomous systems.
where (2.a) denotes the narrow sense of intelligence, while both (2.a) parallel (||) with (2.b) represent the broad sense of intelligence.
Definition 3: Intelligence science is a contemporary discipline that studies the mechanisms and properties of intelligence, the theories of intelligence across the neural,cognitive, functional, and mathematical levels, and other cognitive applications.
The advances of AS are driven by the theoretical and technological development across intelligence science, brain science, cognitive science, robotics, and computational intelligence. The natural and machine intelligence underpinning AS may be inductively generated through the four levels of fundamental cognitive entities: data, information, knowledge,and intelligence as illustrated in Fig. 1. Fig. 1 indicates that intelligence may not be directly aggregated from data as some neural network technologies inferred, because there are multiple inductive layers from data to intelligence. Therefore,a matured AS would be expected to be able to independently discover a law in sciences known as the inductive intelligence or autonomously comprehend the semantics of a joke in natural language known as the inference intelligence. None of them is trivial towards extending the intelligence power of AS beyond traditional data aggregation abilities.
The cognitive foundations of intelligence, as shown in Fig. 1,explain how intelligence is generated in the brain from lowlevel cognitive entities [8], [10], [24], [25], [28]. The relationship among the cognitive entities in the brain may be formally described by a hierarchical model in general system theories.

A classification of intelligent systems may be derived based on the forms of inputs and outputs dealt by the system as shown in Table I. The reflexive and imperative systems are able to process deterministic stimuli by deterministic or indeterministic algorithms, respectively. The adaptive systems are designed to deal with indeterministic stimuli by deterministic behaviors predefined at the design time.However, AS are characterized by both indeterministic stimuli and indeterministic (problem-specific or goal-oriented) behaviors pending for run-time contexts.
Basis on Definitions 1-4 and Table I, the intention and extension of AS may be rigorously expressed as follows.

TABLE I CLASSIFICATION OF AUTONOMOUS AND NONAUTONOMOUS SYSTEMS
Definition 5: Autonomous systems (AS) are a category of advanced intelligent systems that function without intervention of humans for implementing complex cognitive abilities aggregating from reflexive, imperative, and adaptive intelligence to autonomous and cognitive intelligence.
A hierarchical intelligence model (HIM) shown in Fig. 2 is created for revealing the levels of intelligence and their difficulty for implementation in computational intelligence based on the abstract intelligence (αI) theory [24]. In the HIM, the levels of intelligence are aggregated from reflexive,imperative, adaptive, autonomous, and cognitive intelligence with 16 categories of intelligent behaviors. Types of system intelligence across the HIM layers may be formally described in Definition 6 using the pattern of stimulus/event-driven behaviors as summarized in the Appendix.

Fig. 2. The HIM of AS.
where T is the type suffix of different forms of intelligence as listed in the Appendix.


Fig. 3. The mathematical framework of hierarchical AS intelligence.
III. THE FRAMEWORK OF INTELLIGENCE SCIENCE UNDERPINNING AUTONOMOUS SYSTEMS
Based of the conceptual models and literature survey in the preceding sections, the theoretical foundations of AS may be elaborated based on a rigorous framework of intelligence science [24]. The conceptual HIM formalized in this section is summarized in Fig. 3 as a theoretical framework of general AS. The AS framework provides an explanation of how the advanced intelligence for AS is generated from the bottom up based on the transformability within the five-level hierarchy of system intelligence. It may be rigorously implemented as a part of a real-time intelligent operating system.
A. Reflexive Intelligence


where the type suffixes |REF and |PM of a reflexive event and a process model are defined in the Appendix.
B. Imperative Intelligence
C. Adaptive Intelligence

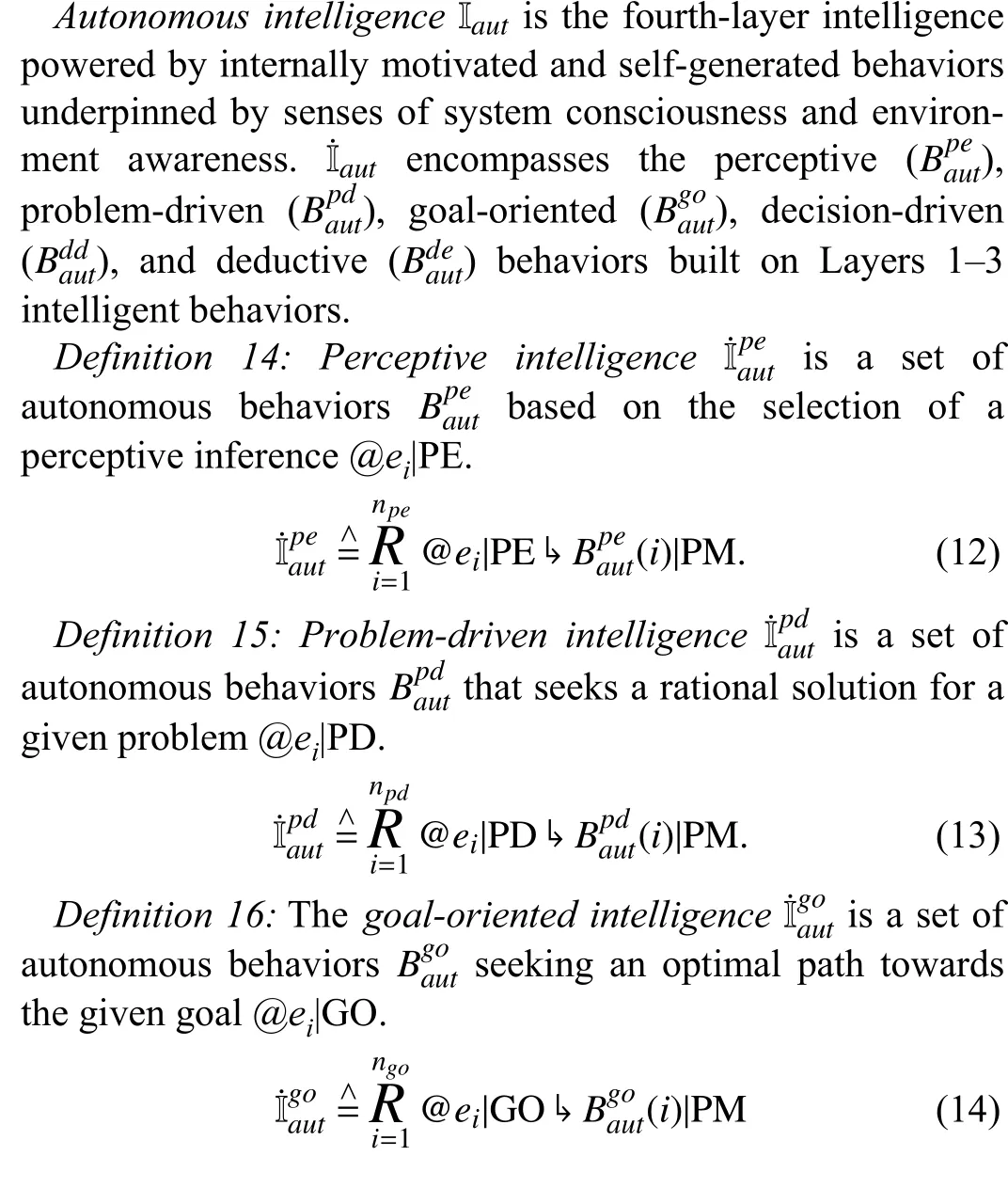
D. Autonomous Intelligence

E. Cognitive Intelligence
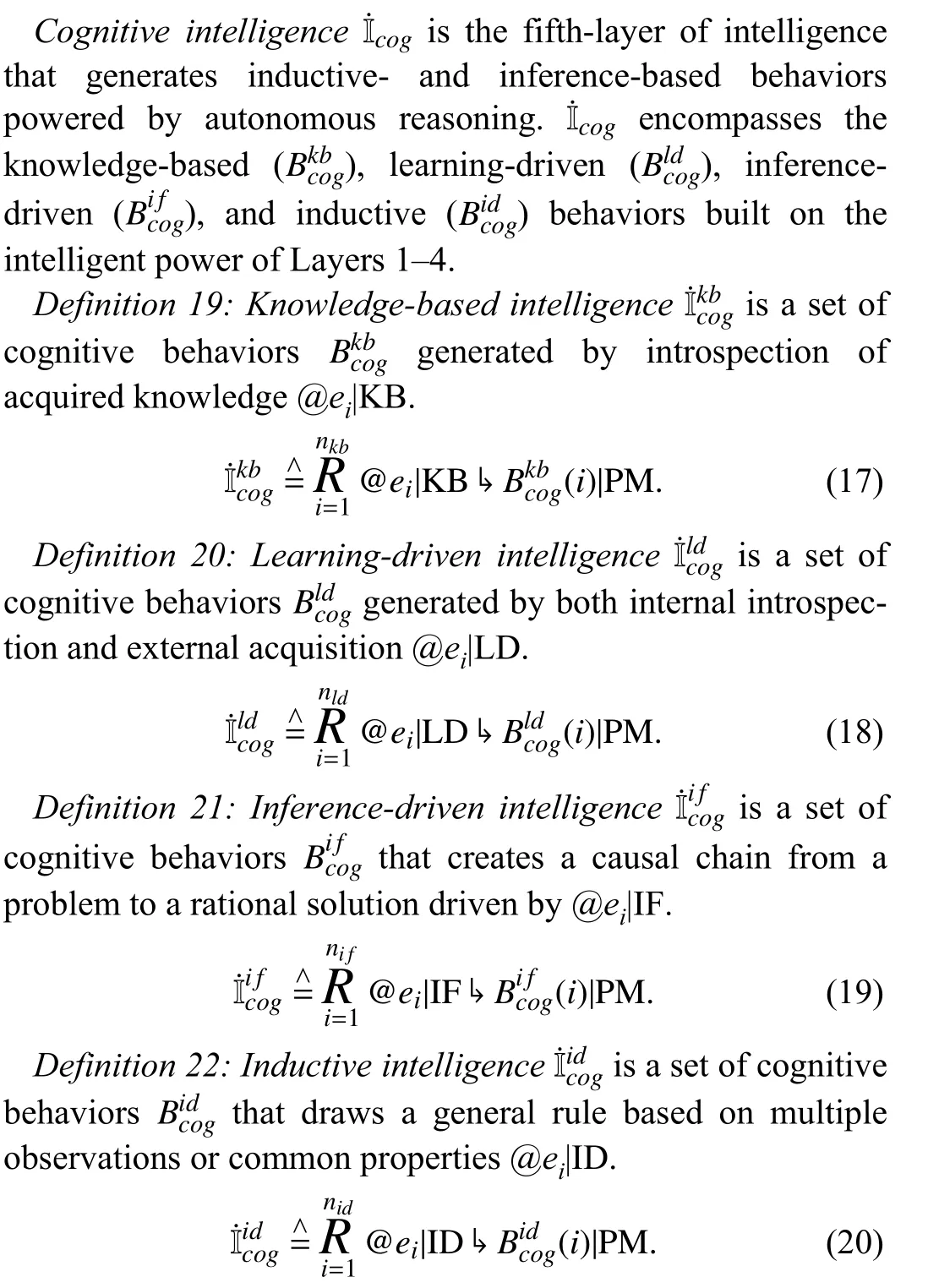
The mathematical models developed in Section III-E reveal
IV. PROPERTIES AND THEORY OF AUTONOMOUS SYSTEMS
On the basis of the HIM of intelligence science as elaborated in Section III, AS may be derived as a computational implementation of autonomous intelligence aggregated across the five layers from the bottom up.
A. Properties of System Autonomy and Autonomous Systems
According to Definition 5 and the HIM, autonomy is a property of intelligent systems that “can change their behavior in response to unanticipated events during operation [6]”“without human intervention [7].”
Definition 23: The mathematical model of an AS is a highlevel intelligent system for implementing advanced and complex intelligent abilities compatible to human intelligence in systems.

which extends the power of system intelligence from reflexive, imperative, and adaptive intelligence to autonomous and cognitive intelligence.
AS implement nondeterministic, context-dependent, and adaptive behaviors of machine intelligence. AS are a nonlinear system that depends not only on current stimuli or demands, but also on internal status and willingness formed by long-term historical events and current rational or emotional goals (Fig. 3). The major AS capabilities need to be extended to the cognitive intelligence level towards highly intelligent systems beyond classic adaptive and imperative systems.
Lemma 1: The behavioral model AS|§ of AS is inclusively aggregated from the bottom up.

where |§ is the system suffix and each intelligent behavior has been formally defined in Section III.
Proof: Lemma 1 may be proven based on the HIM definitions summarized in Fig. 3. ■
Theorem 1: The relationships among all levels of intelligent behaviors as formally modeled in HIM are hierarchical a) and inclusive b).
Theorem 1 indicates that any lower layer behavior of an AS is a subset of those of a higher layer. In other words, any higher layer behavior of AS is a natural aggregation of those of lower layers as shown in Figs. 2 and 3 as well as (22) and(23). Therefore, Theorem 1 and Lemma 1 reveal the necessary and sufficient conditions of AS.
B. The Roles of Humans in Hybrid Autonomous Systems
Because the most matured paradigm of AS is the brain,advanced AS are naturally open to incorporate human intelligence as indicated by the HIM. This notion leads to a broad form of hybrid AS with coherent human-system interactions. Therefore, human traits and factors play an irreplaceable role in hybrid AS in intelligence and system theories.
Definition 24: Human factors are the roles and effects of humans in a hybrid AS that introduce special strengths,weaknesses, and/or uncertainty underpinned by human traits.
The properties of human strengths in AS are recognized such as highly matured autonomous behaviors, complex decision-making, skilled operations, comprehensive senses,flexible adaptivity, perceptive power, and complicated system cooperation. However, the properties of human weaknesses in AS are identified as low efficiency, tiredness, slow reaction,error-proneness, and easy distraction. Furthermore, a set of human uncertainty revealed in AS includes productivity,performance, accuracy, reaction time, persistency, reliability,attitude, motivation, and the tendency to try unknown things even if they are prohibited.
We have found that human motivation, attitude, and social norms (rules) may affect human perceptive and decisionmaking behaviors as well as their trustworthiness known as the autonomous human behavior model (AHBM) as shown in Fig. 4. AHBM illustrates the interactions of human perceptive behaviors involving emotions, motivations, attitudes, and decisions. In AHBM, a rational motivation, decision, and behavior may be quantitatively derived before an observable action is executed. The highly matured human intelligence illustrated in AHBM may be applied as a reference model for AS and cognitive systems [5], [19].
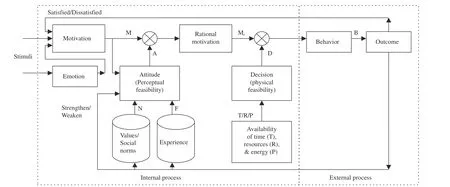
Fig. 4. The AHBM for explaining the roles of human intelligence in AS.
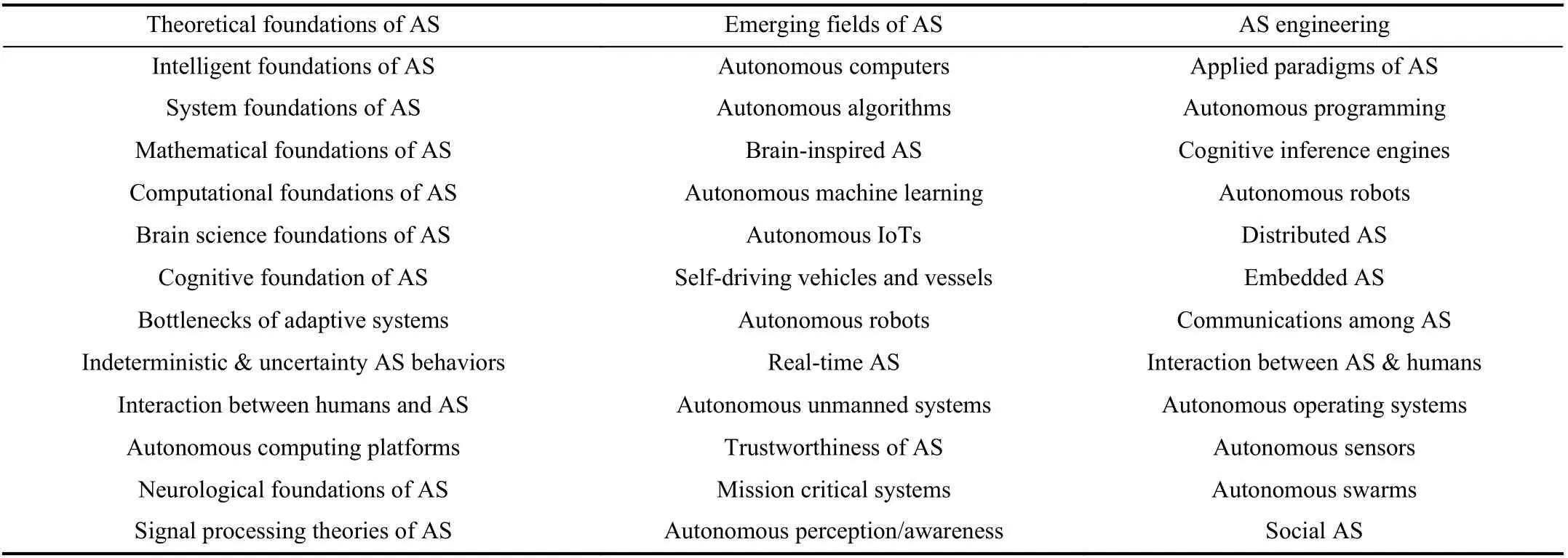
TABLE II THE DOMAIN OF AS AND THEORETICAL/TECHNOLOGICAL CHALLENGES
According to Lemma 1, Theorem 1, and the AHBM, a hybrid AS with humans in the loop gains strengths towards the implementation of cognitive intelligent systems. The cognitive AS sufficiently enables a powerful intelligent system by the strengths of both human and machine intelligence. This is why intelligence and system sciences may inspire us towards the development of fully autonomous intelligent systems in highly demanded engineering applications [1]-[3], [10], [12], [18], [20], [28], [34].
V. EMERGING PARADIGMS OF AUTONOMOUS SYSTEMS
The preceding sections have formally described AS and their theoretical and behavioral foundations. On the basis of the HIM and the theoretical structures of AS, an overall outlook on the domain of AS towards advanced general AI(GAI) systems is provided in this section. It then presents a set of emerging paradigms of AS including brain-inspired systems, cognitive robots, and autonomous knowledge learning systems.
A perception about the structure of the domain of AS embodying the advanced AI field may be classified into three categories encompassing theoretical foundations, emerging domains of applications, and AS engineering technologies as summarized in Table II. Many topics under study in Table II represent fundamental challenges to AS, which indicate the theoretical and methodological immaturity of AS or their constraints and bottlenecks. The following case studies towards AS demonstrate the scope of problems and the demand for advanced theories and technologies for AS development.
A. Brain-Inspired Systems
Brain-inspired systems (BIS) are a typical AS because basic research on the cognitive foundations of natural intelligence may shed light on the general mechanisms of various forms of machine intelligence [4], [33]. Modern cognitive computers,computational intelligence, cognitive robots, and intelligent internet of things (IoT) [11], [12], [17], [35] are typical paradigms of brain-inspired systems. Therefore, understanding the brain as perhaps the most matured intelligent system becomes a foundation towards AS design and implementation.It is recognized that as a computer may be elaborated by hierarchical reduction from its logical models to the chip-level implementations, the comprehension of the brain may also be achieved in a similar reductive approach to BIS development.
The logical model of the brain may be embodied by the layered reference model of the brain (LRMB) as shown in Fig. 5[25]. LRMB reveals the insights of the brain by a set of 56 cognitive processes at seven layers encompassing: 1)Sensation, 2) Action, 3) Memory, 4) Perception, 5) Cognition,6) Inference, and 7) Intelligence. The lower four layers are the fundamental subconscious functions of the natural intelligence known as the brain’s operating system; while the higher three layers are classified as the acquired conscious intelligent functions, which underpin all real-time behaviors and life functions of humans as a temporary composition of run-time instances. Therefore, the mechanism of the natural intelligence embodied by the brain may also be rigorously reduced from the top down as indicated by (3) and/or (22) and extended in Fig. 3 . Once all the cognitive processes are implemented by computational intelligence, we obtain a powerful AS and a GAI platform may emerge.

Fig. 5. The layered reference model of the brain (LRMB).
B. Cognitive Robots
Cognitive robots (CRs) are a highly representative paradigm of AS and BIS underpinned by transdisciplinary studies on computational intelligence, robotics, and brain sciences [32],[34]. A CR is designed to reflect the fundamental philosophy in contemporary robotics and AS. Although a CR does not necessarily appear humans, it is expected to be capable of learning, inferencing, precepting, thinking, and autonomous decision-making as humans compatible to the mechanism of LRMB in Section V-A.
It is recognized that traditional robots are implemented by program-controlled technologies at Level 2 to 3 of the HIM with imperative/adaptive intelligence as modeled in Lemma 1 and Fig. 3 . The key functions missed in non-autonomous robots are conscious environment awareness, cognitive inference, knowledge acquisition, semantic comprehension,rational decision-making, real-time behavioral generation, and creative problem-solving. However, CRs beyond classic robots are powered by an AS embodied by the essential ability of run-time intelligent behavior generation for unpredicted problem solving.
A CR is configured according to LRMB for mimicking the brain [25] as shown in Fig. 6 . The CR architecture encompasses sensory, learning, inference, and behavior generation engines [34]. These engines mimic the brain’s perceptive and conscious engines where the latter is refined by CR’s learning/inference/behavior generation engine, specifically. CR carries out autonomous learning and reasoning for implementing the cognitive, causal, recursive, and inductive intelligence as modeled in Section III. A cognitive knowledge base (CKB) is recognized as a necessary and common foundation for implementing all level intelligences across CR,AS, and the brain. In other words, no autonomous intelligence would be generated without the CKB as evidenced by various forms of memories in the brain as shown in Fig. 6. CR is expected to be capable to acquire deep semantic understanding of human knowledge. It is driven by formal intelligent mathematics (IM) [30] encompassing concept algebra, semantic algebra, real-time behavior process algebra,inference algebra, big data algebra, visual semantic algebra,and system algebra.
The CR theories and technologies pave a way to transfer human knowledge and their cognition to machines via AS.They enable CRs to coordinate with humans on the AS platform. Pilot experiments [33] have demonstrated that a CR is able to build its own CKB for quantitatively representing conceptual, semantic, and behavioral knowledge, which extends machine intelligence to the advanced level of autonomous and cognitive intelligence according to the HIM.CRs are expected to form the next generation of intelligent computing platform for AS applications.
C. Autonomous Knowledge Learning Systems
The design of CKB for CRs reveals that the essence of knowledge is a cognitive mapping between a newly acquired concept against all known ones in CKB of AS [5], [25].Furthermore, the basic unit of knowledge is discovered as a binary relation (bir) [33] as a counterpart to bit as the unit of information. Therefore, knowledge science has emerged as a contemporary discipline for explaining the mechanism of intelligence generation in both AS and human brains [3], [33].As a simulation of unsupervised and autonomous machine knowledge learning by a CR, the hierarchical and interconnected knowledge has been autonomously generated mimicking the neural clusters for knowledge representation in the brain as shown in Fig. 7 . It demonstrates a set of knowledge learning results by a CR for the first 600+frequently used concepts in English powered by the intelligent mathematics of concept and semantic algebras [27], [30]. It took the CR less than a minute to rigorously and quantitatively acquire such a large degree of knowledge, which would require several person-months in traditional ontology-based manual knowledge representation.
According to the HIM for AS, the ability for knowledge learning and reasoning is the foundation for intelligence generation for both humans and AS. In other words, the traditional data-driven approach may not necessarily lead to direct intelligence generation. This observation reveals a fundamental difference between AS and classical data regression technologies for AI. Therefore, the Bir theory for cognitive knowledge representation [31] has enabled the development of the CKB platform of AS and their shareability between machines and humans. This transdisciplinary theory paves a way to the development of the next generation computers as cognitive computers (CCs) for efficient knowledge processing for AS.
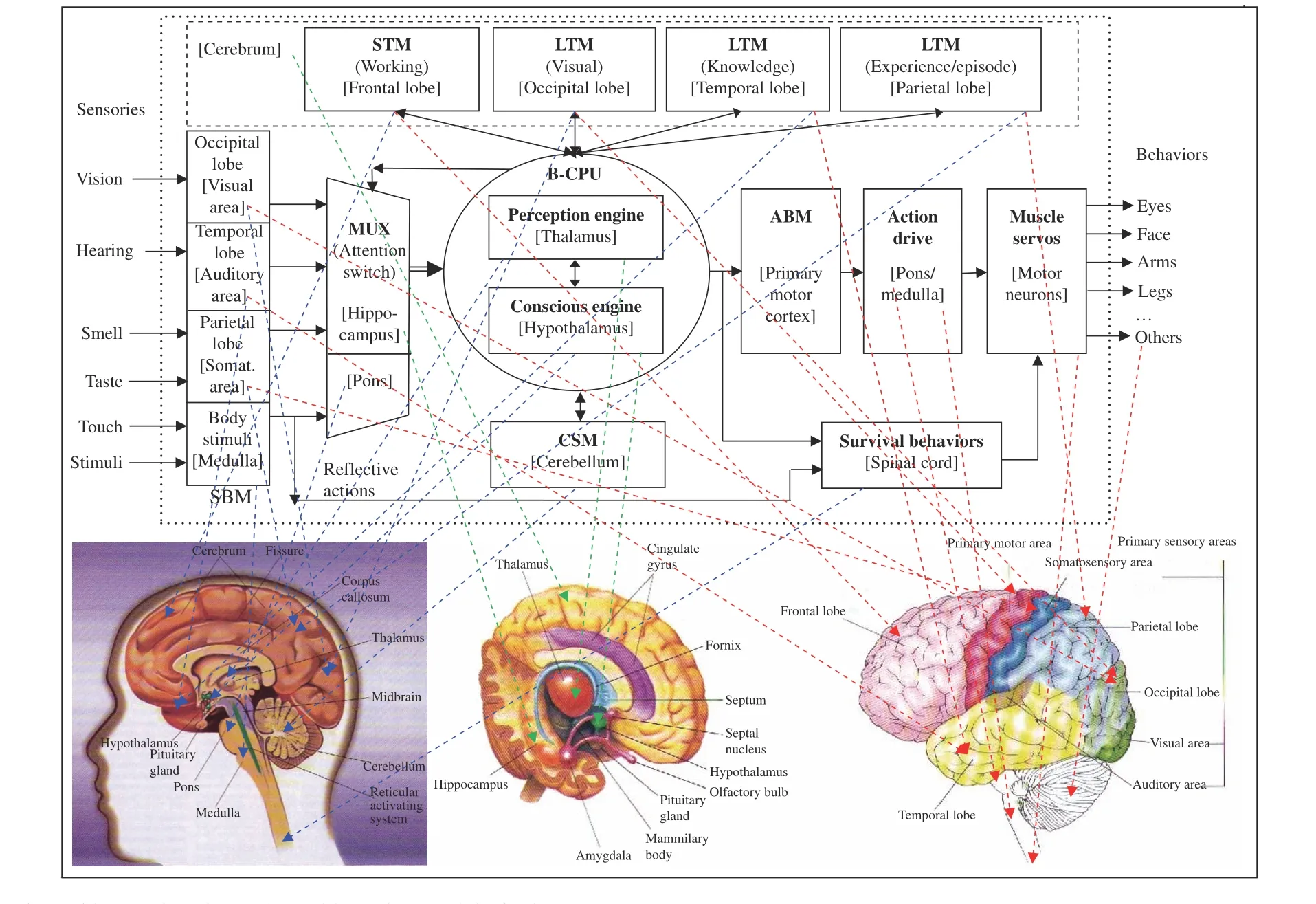
Fig. 6. The architectural analogy of cognitive robots and the brain.
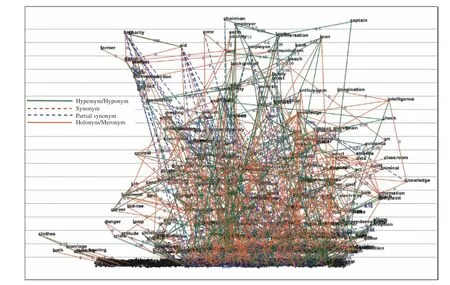
Fig. 7. Experiment on autonomous knowledge learning by AS.
AS theories and technologies shall lead to the design and implementation of advanced GAI systems coordinating humans and intelligent machines in a coherent framework in order to augment human intelligence. The expected advances in AS should enable machinable thinking and reasoning,unsupervised machine learning for knowledge acquisition and behavior generation, and autonomous assistants to human users for problem-solving and decision-making via downloadable intelligence enabled by AS in the future.
VI. CONCLUSION
This work has explored the intelligence, cognition, and system science foundations of AS towards the emerging field of general AI theories and methodologies. A hierarchical intelligence framework of AS has been developed for elaborating the properties of autonomous intelligence. Such properties and hierarchical models offer a roadmap toward the design and implementation of AS. The first finding of this work is that the fundamental challenges for AS have been deeply rooted in the fact that almost all AI problems have been out of the domain of real numbers R designated in classic mathematics. The second finding is that the current programming languages cannot express and implement autonomous behaviors, because the run-time indeterministic and uncertain behaviors cannot be expressed and implemented on traditional computing platforms. The third finding is that the basic unit of knowledge for AS and AI is a bir. As a result,a theoretical framework of AS has been developed towards highly demanded engineering applications including braininspired cognitive systems, cognitive robots, unmanned systems, autonomous vehicles, autonomous defence systems,and intelligent IoT.
APPENDIX
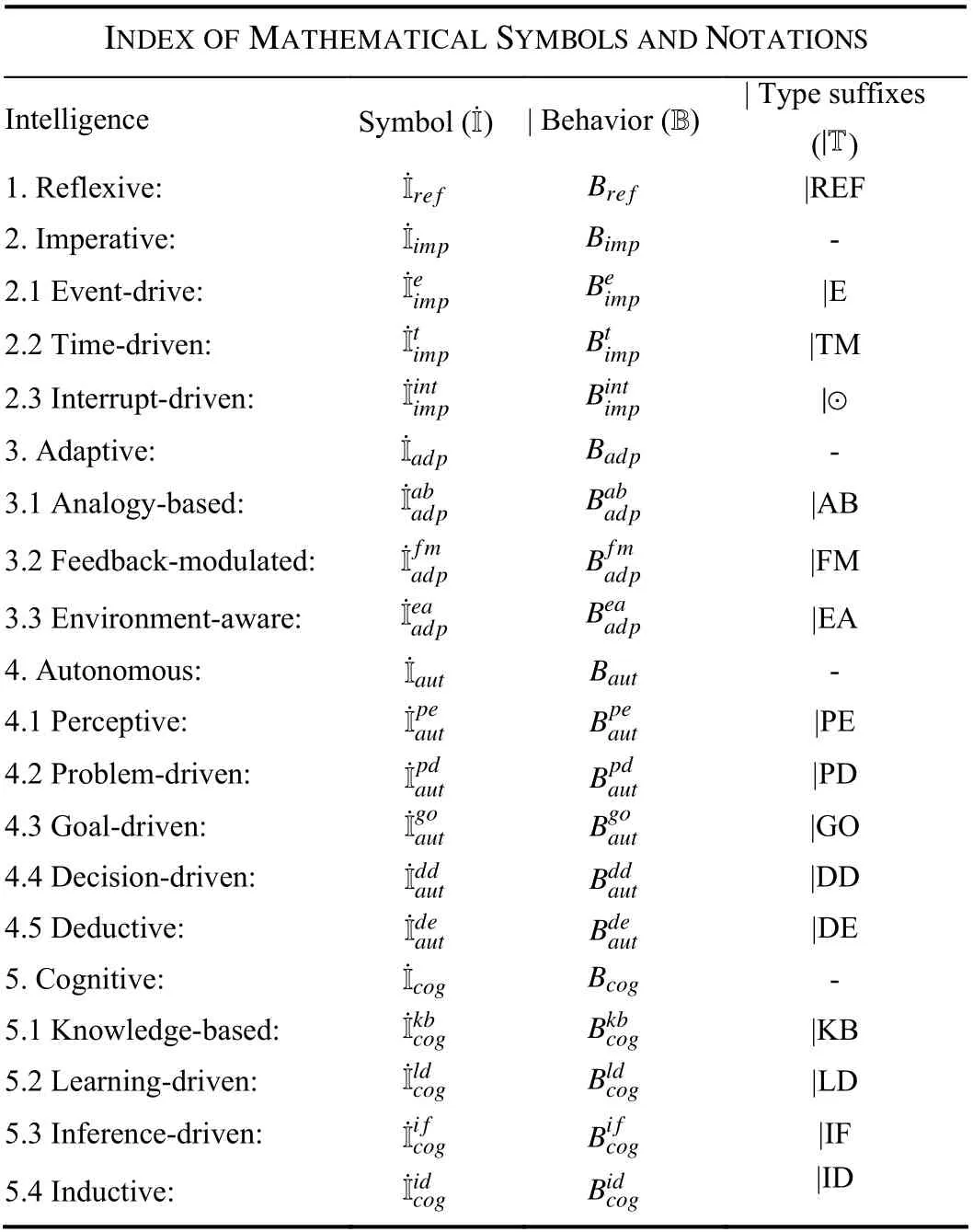
INDEX OF MATHEMATICAL SYMBOLS AND NOTATIONS| Type suffixes( )1. Reflexive: ˙Ire f Bre f |REF 2. Imperative: ˙Iimp Bimp -2.1 Event-drive: ˙Ieimp Beimp |E 2.2 Time-driven: ˙Itimp Btimp |TM 2.3 Interrupt-driven: ˙Iint Intelligence ˙I Symbol ( ) B| Behavior ( ) |T imp Bintimp |⊙3. Adaptive: ˙Iadp Badp -3.1 Analogy-based: ˙Iabadp Babadp |AB adp Bfmadp |FM 3.3 Environment-aware: ˙Ieaadp Beaadp |EA 4. Autonomous: ˙Iaut Baut -4.1 Perceptive: ˙Ipe 3.2 Feedback-modulated: ˙Ifm aut Bpeaut |PE 4.2 Problem-driven: ˙Ipd aut Bpdaut |PD 4.3 Goal-driven: ˙Igo aut Bgoaut |GO 4.4 Decision-driven: ˙Idd aut Bddaut |DD 4.5 Deductive: ˙Ide aut Bdeaut |DE 5. Cognitive: ˙Icog Bcog -5.1 Knowledge-based: ˙Ikbcog Bkbcog |KB 5.2 Learning-driven: ˙Ildcog Bldcog |LD 5.3 Inference-driven: ˙Iifcog Bifcog |IF 5.4 Inductive: ˙Iidcog Bidcog |ID
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- A Multi-Layered Gravitational Search Algorithm for Function Optimization and Real-World Problems
- Dynamic Hand Gesture Recognition Based on Short-Term Sampling Neural Networks
- Dust Distribution Study at the Blast Furnace Top Based on k-Sε-up Model
- A Sensorless State Estimation for A Safety-Oriented Cyber-Physical System in Urban Driving: Deep Learning Approach
- Theoretical and Experimental Investigation of Driver Noncooperative-Game Steering Control Behavior
- An Overview of Calibration Technology of Industrial Robots