舰载相控阵雷达跟踪模式收发波形时间分配方法
2021-04-10李军侠
李军侠
(中国船舶工业系统工程研究院,北京 100094)
0 引 言
波形设计[1–2]是舰载雷达系统设计的重要环节,其中发射接收时序是雷达波形主要因素之一。从发射接收时序上现代雷达包括脉冲雷达和连续波雷达2 种体制,军用舰载雷达大部分采用收发分离的脉冲体制,脉冲体制增强发射与接收的隔离度有利于提高探测距离。脉冲体制分成了功能相对独立的发射与接收2 个时间段,发射段发射机辐射信号,接收段不辐射信号接收并处理辐射信号的目标回波。发射时段占整个工作周期的百分比就是雷达工作波形的重要参数脉冲占空比,不同占空比的波形与雷达工作模式紧密相关,雷达按照脉冲占空比分为低占空比、中占空比和高占空比三类[3]。这种传统划分方式可利用收发分配措施提高脉冲使用密度,相控阵雷达逐渐具有高占比波形。
相控阵雷达[4–5]多采用脉冲模式,为雷达多功能即多目标跟踪和搜索提供了最佳时间分配手段,相控阵雷达也多被定位为整条舰船甚至编队中最重要的探测预警设备。相控阵雷达调度多项任务时需要合理优化时间资源,这是相控阵雷达显著的工作特点。这里从雷达波形角度采用一定自动调整的方式分配收发时间,进一步提高雷达波形的收发效率。雷达一旦进入目标指示状态或目标跟踪状态,目标的距离已经获知,那么基于发射时间点与接收时间点也相应确定,因此接收段正确匹配雷达发射的脉冲即可获得目标信息。传统雷达由于机械扫描式运动制约了波形效能发挥,跟踪目标模式采用单目标逐次跟踪方式,必然容易造成时间资源浪费。对比传统机械扫描方式,相控阵雷达采用电子波束:控制切换雷达波束,波束的赋形与指向调整都是在瞬间完成,这一控制时间远小于目标机动周期,与雷达波形的切换时间相当或处于同一量级。
从计算机操控角度讲,传统跟踪目标模式属于信号层面的串行进程[6],一个目标回波接收后开始照射接收另一目标回波;使用相控阵跟踪雷达后目标跟踪转为并行进程,减少了雷达收发之间的等待时间。从相控阵雷达执行任务角度讲,相控阵雷达的任务调度与这里波形层面的收发时间分配有一定交叉。相控阵雷达调度方式包括固定模版法、多模版方法、部分模版法和自适应调度法四类[7],其中自适应调度法的脉冲交错方式[8–10]考虑了迭代双脉冲交错提高时间效率,该方法是完全时间自适应方法,而本文基于大时间片划分多目标批处理的思路在硬件时序和操作系统设计上存在较大差异,属于一种新的设计思路。
1 相控阵雷达收发波形时间分配方法
1.1 波形收发时序逻辑
相控阵雷达是多功能性表现为可以搜索可以跟踪,其最突出的优势是跟踪能力,尤其体现对抗饱和攻击的态势情况下,这时仅相控阵雷达有能力完成“一对多”的目标跟踪任务。传统跟踪雷达某个时间段内只能跟踪单一目标,相控阵雷达通过波束快速切换实现多任务、多批次、多目标“同时跟踪”。
但是相控阵雷达的传统模式未采用雷达目标的已知信息,前面目标探测后下一目标接着探测,接着后续目标接着探测;相比较而言,新模式采用了雷达目标的已知信息,根据目标位置的差异自动建立分层模式,并且根据目标距离远近尽量采用嵌入式即发射-发射-接收-接收模式。传统模式与新嵌入分层模式的差异采用图示说明更清晰,如图1 所示。
图中显示了3 个待跟踪目标,传统模式下顺次逐个跟踪目标,新模式下目标2 嵌入目标1 的收发周期内部,目标3 未能嵌入其中,目标3 在目标1 接收脉冲段后发射脉冲并接收回波脉冲,即目标3 与目标1 属于不同层次。根据上述图示原理,这里给出嵌入分层方法跟踪探测多目标的技术特点:
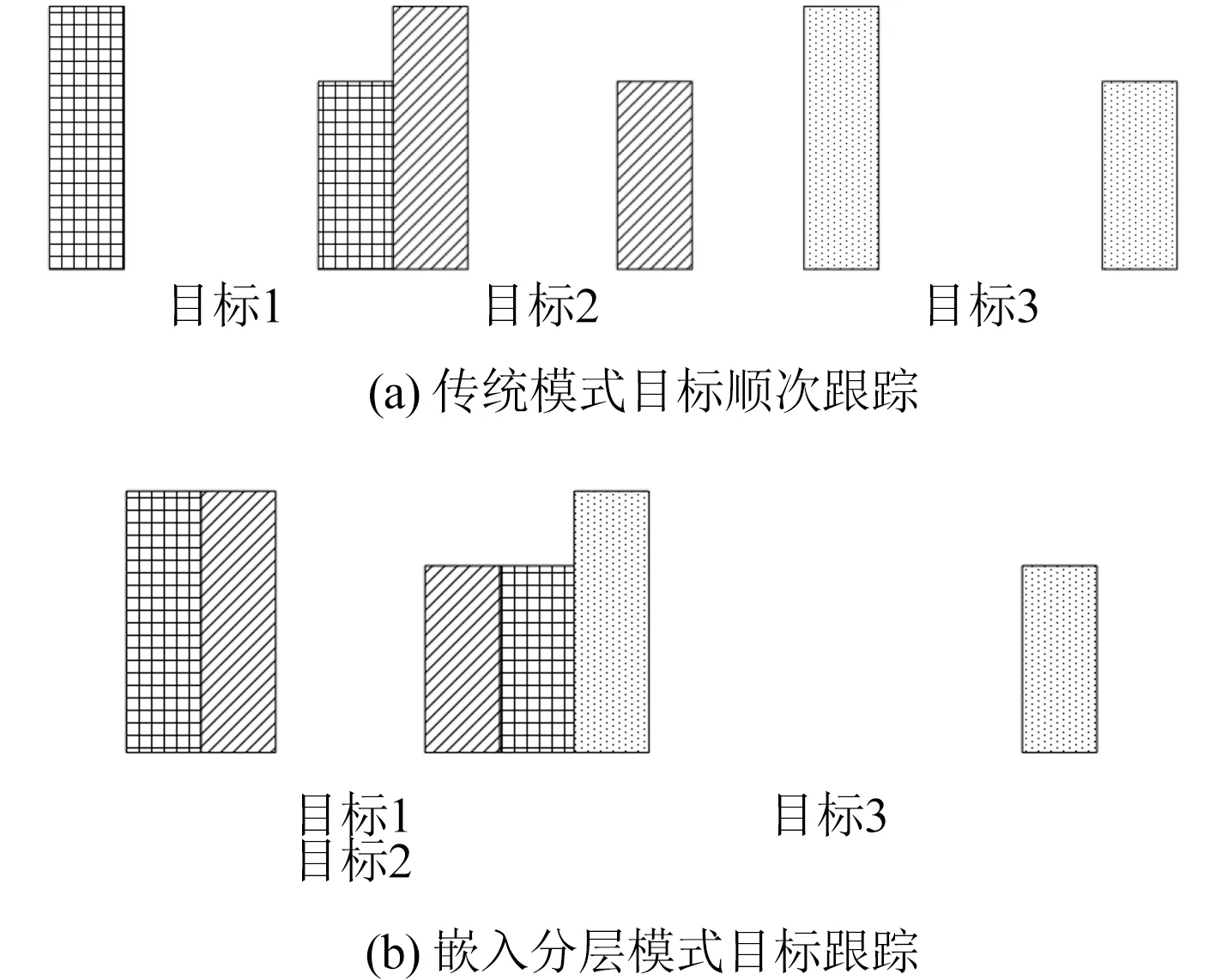
图1 嵌入分层模式的效果图Fig. 1 Effect picture of embedding layered pattern
1)根据雷达硬件特点,确定相控阵模式切换时间,相控阵雷达硬件调整时间、波形发射及脉冲宽度等因素决定目标照射过程需要一定的相控阵模式切换时间为:

其中:Tshi ft为雷达硬件调整的时间,Tτ为雷达发射脉冲宽度。
2)设计待跟踪目标间的时间嵌入关系
待跟踪目标i比待跟踪目标j(i,j为排序编号)的距离大两个时间分辨率,则满足双目标之间的嵌入关系,其计算公式如下:

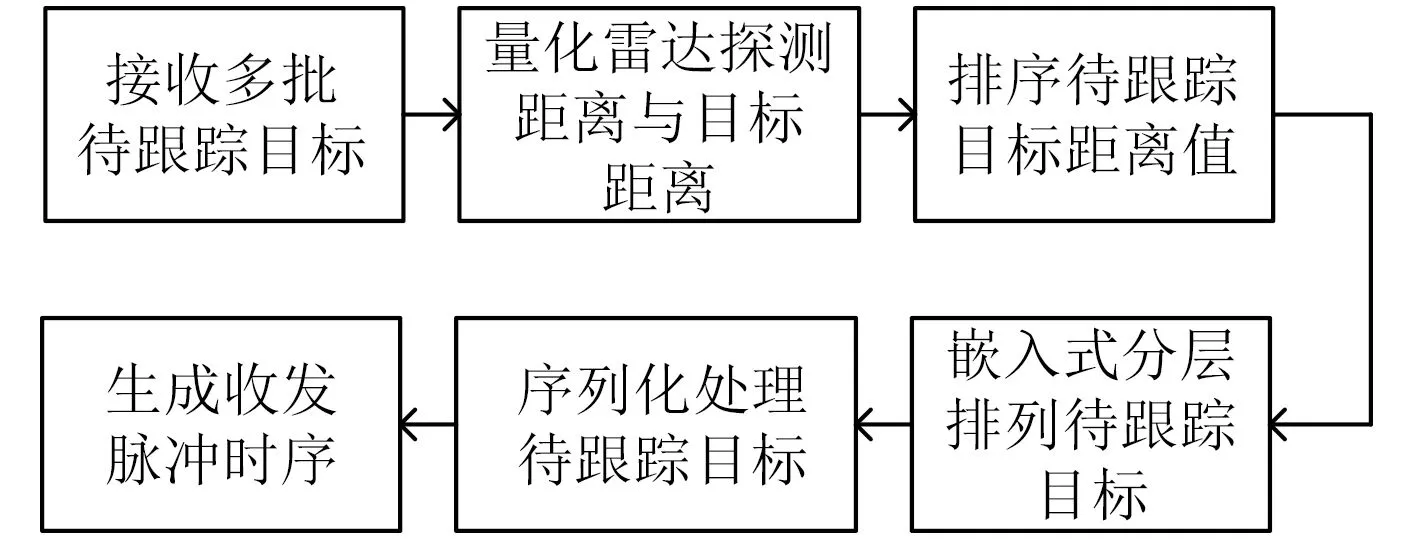
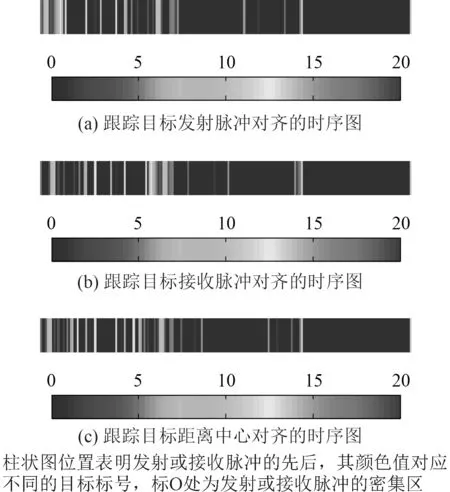
其中目标i,j满足排序关系i 基于嵌入分层的收发波形时间分配方法包含6 个基本步骤,其流程图如图2 所示。 图2 嵌入分层波形时序方法流程图Fig. 2 Flow chart of embedding layered waveform timing method 1)接收多批待跟踪目标 在允许时间内接收多批待跟踪目标,接收时段结束后将全部待跟踪目标一同处理,不采用文献[8]逐个目标接收的方式,这里在单位时间内分组形式接收尽量多的待跟踪目标。 2)量化雷达探测距离与目标距离 同时考虑到目标探测距离范围,将探测距离范围以模式切换时间为最小时间粒度划量化为整数个时间点; 根据波形切换时间与脉冲周期计算脉冲驻留时间,接收时段采用发射相同的时间长度。雷达探测范围决定了发射脉冲与接收脉冲之间隔为: 式中:R为目标相对雷达的距离;c为光在探测环境中的传播速度。 因此每个目标i对应一个时间点对满足: 式中:Ti1与Ti2分别表示发射脉冲时间点和接收脉冲时间点, round()表示四舍五入取整处理。 将整个距离区间段划分后必然造成某些目标回波存在跨区间段问题,通过适当增加区间段长度可以解决。需要特别指出,时间切换量化间隔过大或波形范围划分过粗将会导致超近距目标无法探测。 3)排序待跟踪目标距离值 将待跟踪目标距离值由大到小排序,这是嵌入分层方法的关键步骤,排序后目标距离之间的嵌入关系就呈现出来。 4)嵌入分层排列待跟踪目标 将排序后的目标第1 个目标置于首行第1 位置,第2 目标与第1 目标比较,若满足第2 目标嵌入第1 目标条件,则排在第1 行第2 列,否则,第2 目标排在第2 行第1 列,同理,第3 个目标先判断能否放置在第1 行,否则,考虑第2 行、第3 行,…,直到最后一个目标放置完毕。 嵌入分层排列处理将一维排列的目标距离值调整为两维排列的目标距离值。嵌入分层结构横向表示满足嵌入关系的目标集合,列向表示无法嵌入前面行的目标集合。 5)序列化处理待跟踪目标 经过嵌入分层排列后所有跟踪目标有明确的排列位置,接下来将层次目标序列化排列。 将目标沿着行向排列然后第2 行目标续第1 行后面,直到全面待跟踪目标串行序列化完成。这样,全部脉冲的前后次序排列完成,下面进一步确定脉冲发射与接收时间点位置。 6)生成收发脉冲时序 根据发射脉冲与接收脉冲的对齐关系,这里分为3 种时序:发射脉冲对齐,接收脉冲对齐和发射接收中心对齐。 发射脉冲对齐,将嵌入脉冲对的发射脉冲前后顺次发射,发射脉冲之间不留时间间隙,这种条件下发射资源更集中;接收脉冲对齐,将嵌入脉冲对的接收脉冲前后顺次接收,接收脉冲中间不留时间间隙,这种条件下接收段采集和计算资源更集中;中心对齐,发射脉冲和接收脉冲都不顺次连接,确保中间有一定的时间间隔,有利于抗干扰环境。确定待跟踪目标中心为Ci,满足: 式中:dk表示k层对应的常量。 中心对齐模式中发射资源与计算资源均不集中,有利于降低雷达系统资源的均衡配置。 嵌入分层方法是一类新的时序调度方式,本方法采用批处理的方式,一定时段内接收可以多个待跟踪目标;嵌入分层法采用嵌入和分层2 种措施优化了多目标的发射接收时序波形,新时序清晰简洁。 本节采用嵌入分层方法进行仿真验证,仿真实验模拟了20 个目标,其距离值随机产生,雷达的探测距离小于300 km,按照4 km 一个量化区间段(这里雷达模式切换的时间为6.7 us,脉冲宽度为20 us)。 目标与雷达的距离值由均匀随机数产生,目标距离值分别为73.71,190.44,234.06,218.95,176.02,159.45,153.63,87.24,262.67,249.35,247.48,127.22,47.69,256.92,153.82,291.14,294.77,252.80,273.10,189.10,单位为km;其对应的量化距离值分别为18,48,59,55,44,40,38,22,66,62,62,32,12,64,38,73,74,63,68,47。 最终产生的脉冲排列嵌入分层柱状图见图3,柱状图越高代表目标距离越远,图中前15 个柱状图为第1 层目标,后续4 个柱状图为第2 层目标,第3 层仅1 个目标。通过嵌入分层方法计算全部20 个目标的跟踪时间仅需要3 个大目标的跟踪时间,会节省雷达时间资源。 图3 20 个待跟踪目标形成的嵌入分层图Fig. 3 Embedded hierarchical graph formed by 20 targets to be tracked 图4为20 个待跟踪目标形成的收发波形时序图,图中深蓝色0 为空闲时段,标号1~20 对应20 个不同目标的标号,成对出现的柱状图分别表示待跟踪目标的发射时段和接收时段。其中,图4(a)为发射脉冲对齐时序图,图4(b)为接收脉冲对齐时序图,图4(c)为发射脉冲与接收脉冲中心对齐的时序图,可以看到图4(a)左侧发射时间内出现多条密集的条纹,图4(b)中间时间内出现多条密集的条纹,这段时间为雷达接收段,图4(a)中没有出现多条紧邻的条纹。 图4 雷达跟踪目标形成的收发波形时序图Fig. 4 Time sequence diagram of receiving and transmitting waveform formed by radar tracking target 这里使用时间占用率PT来衡量嵌入分层方法的时间效能: 式中:PT表示实际使用的时间。时间占用率越小,则时间效能越高。 本次仿真中图3 表明存在20 个待目标,实际使用了3 层,即实际使用时间不会超过3 个最远目标的时间总和,经具体计算20 个目标的时间占用率为21.1%。 嵌入分层方法是基于波形设计和任务调度两角度提出的收发波形时间分配方法,本方法没有使用固定的时序波形,同样没有采用完全的自适应技术,而是根据目标距离集合分层调整发射接收时序,文中仿真结果表明嵌入分层方法合理有效,适用于海洋密集目标环境下相控阵雷达的跟踪与探测,实际应用中结合发射机和信号处理机具体指标会提供一种非常有益且实用的波形切换策略。 本文提出的波形嵌入分层方法主要用于目标跟踪,实施搜索功能方面考虑不充分,算法中无法详尽相控阵雷达的具体细节。相控阵雷达会存在T/R 组件配置模式、波束控制方式、接收方式或采样方式的差异,具体使用过程中应对嵌入分层算法进行适当调整。舰载相控阵多功能雷达海战场应用情况复杂,合理优化算法参数应用于多种实际场景是后续的研究方向。1.2 嵌入分层波形时序方法



2 嵌入分层时序方法仿真
2.1 嵌入分层方法获取的发射脉冲时序

2.2 嵌入分层方法获取的接收脉冲时序
2.3 嵌入分层方法时间效能

3 结 语
