Leveraging the UAV to support Chinese Antarctic expeditions: a new perspective
2021-04-09LITengZHANGBaogangCHENGXiaoHUIFengmingLIYuansheng
LI Teng, ZHANG Baogang, CHENG Xiao, HUI Fengming & LI Yuansheng
• Trend •
Leveraging the UAV to support Chinese Antarctic expeditions: a new perspective
LI Teng, ZHANG Baogang, CHENG Xiao, HUI Fengming& LI Yuansheng
State Key Laboratory of Remote Sensing Science, College of Global Change and Earth System Science (GCESS), Beijing Normal University, Beijing 100875, China;School of Geospatial Engineering and Science, Sun Yat-Sen University, Zhuhai 519082, China;Southern Marine Science and Engineering Guangdong Laboratory, Zhuhai 519082, China;Polar Research Institute of China, Shanghai 200136, China
Recent developments in Unmanned Aerial Vehicles (UAVs) and their applications in various subjects are of interest to polar communities. Due to the harsh climate and dangerous environment, these regions pose challenges for the expedition teams. Several countries have tested the UAV technology to support Antarctic research and logistics. In this trend paper, we provide insightful reviews and discussions on such a prospective topic. Based on a comprehensive literature survey, we firstly summarize the key research progress of UAV in Antarctic studies. Then the examples of risk scenarios during the field exploration are given, after which several promising applications of the UAVs in safety guarantee are illustrated. In particular, we present a case of site-selection for the Chinese first ice sheet airfield, using the data collected in the 34th Chinese National Antarctic Research Expedition (CHINARE). In the end, we highlight the unique value of the UAVs in the popularization of polar science before concluding the advantages and limitations. Considering their excellent performance, we expect more innovations for UAV’s applications in the following Antarctic expeditions.
Unmanned Aerial Vehicle (UAV), Antarctic expedition, remote sensing, polar research, logistics support
1 Introduction
Antarctica is characterized by extremely low temperatures and humidity, consistently strong wind, the lack of solar radiation, and limited available resources on the endless ice fields. Such areas have long been notorious for explorers since the Heroic Age when they suffered from the scarce supplies. Due to the aggravated global warming and iconic climate change during the last decades, the 21st century witnessed drastic and profound transitions in Antarctica and the Southern Ocean. On one hand, such a delicate system attracts more scientists worldwide to investigate; on the other hand, the hostile environments pose serious challenges for logistic supporting capabilities.
The logistic building-up has made remarkable progress since China first set foot on the Antarctic in the 1980s (Chen et al., 2017). Besides four immovable Antarcitic stations, the Chinese polar team currently holds a suite of expedition infrastructure, including two icebreakers, namely R/Vand R/V, one fixed-wing aircraft, three helicopters,, and the, and dozens of heavy snowcats. All these resources are unitedly managed and operated by the Polar Research Institute of China (PRIC) in Shanghai.
The Unmanned Aerial Vehicle (UAV), as a cost-effective and easy-to-use platform, is emerging as a useful tool in various scientific researches. They can be divided into multiple categories depending on the power source, size, sensors, and/or propulsion system. Such tools have also demonstrated their values in cold environment disciplines, such as glaciology (Bhardwaj et al., 2016), geomorphology (Bliakharskii et al., 2019), and ecology (Miranda et al., 2020). As an ideal bridge between satellite observation and grounded measurement, UAVs could, to some extent, replace the traditional airborne survey with expensive fixed-wing aircrafts.
In this paper, we briefly summarize the trend of UAV’s applications in Chinese and international Antarctic expeditions based on a literature survey, and then suggest the UAV could also play an advantageous role to support the Antarctic explorations. Particularly, our paper features several experimental cases in different expedition scenarios during the Chinese National Antarctic Research Expedition (CHINARE). At last, we elucidate their unique advantages and problems. Although still in their early stage nowadays, the excellent performance of the UAVs convinces us of the great prospects for future development.
2 Scientific applications: at home and abroad
To accurately capture the trend of UAV’s development in Antarctic scientific researches, we did a literature review with the keywords on ‘UAV’, ‘drone’, ‘UAS’ (Unmanned Aerial System), ‘RCV’ (Remote-Controlled Vehicle), ‘RPV’ (Remotely Piloted Vehicle), and/or ‘RPAS’ (Remotely Piloted Aircraft Systems). Together with the above synonyms, ‘Antarctic(a)’ or ‘Southern Ocean’ was also input into the Beijing Normal University’s academic engine as the spatial constraint. This inclusive engine incorporates most common databases such as CNKI, Elsevier ScienceDirect, Scopus, Web of Science, etc. The period is set after 2000. Finally, more than one hundred relevant academic items were collected, which reveals an increasing trend of UAV’s development since 2004 (Li et al., 2020a). To present the state of the art, we select a couple of latest and representative progress in certain fields, both at home and abroad. However, it is worth noting that the UAV’s applications cover much more diverse researches, such as geomagnetism (Funaki and Hirasawa, 2008), aerodynamics (Goraj, 2014), and environment management (Leary, 2017), which cannot be elaborated in details here. Readers are encouraged to find more interesting topics in other related reviews (Gaffey and Bhardwaj, 2020; Li et al, 2020a).
2.1 Glaciology
The low-cost optical camera is capable of resolving the small-scale structures and parameters on the ice surface, such as albedo, moraine, and crevasses. Based on the repeated surveys, some features of glacial dynamics could be deduced. As shown in Figure 1, a group of Chinese researchers systematically compared the performance of UAV-based photogrammetry and laser scanning methodology for the ice doline features (Li et al., 2020b). The vertical dimension information is also critical for glacier mass balance calculation, but few experiments were conducted so far due to technical difficulties. As the only successful example of covering the deep ice layers, Leuschen et al. (2014) from the University of Kansas employed a large and stable UAV platform carrying ice penetrating radar.
2.2 Geomorphology
The UAVs have already revolutionized landform research because of their three-dimensional capability for terrain characterization. The meso-scale digital elevation models (DEM) generated by UAVs cover the spatial gap between macro-scale spaceborne observations and micro-scale in-situ measurements. For the first time, the Chinese surveyors provided the centimeter-scale DEM and orthophoto ofDalk Glacier, East Antarctica, to reveal the ice micro-topography and support geomorphological research (Yuan et al., 2020). Researchers developed an automated method to detect and delineate sorted stone circles in the permafrost landscape (Pereira et al., 2020). UAV has also stretched its functionality into the continental interior, for example, Heritage Range (Westoby et al., 2016). In general, UAVs suffice geomorphological mapping purposes both on the coast and inland Antarctica.
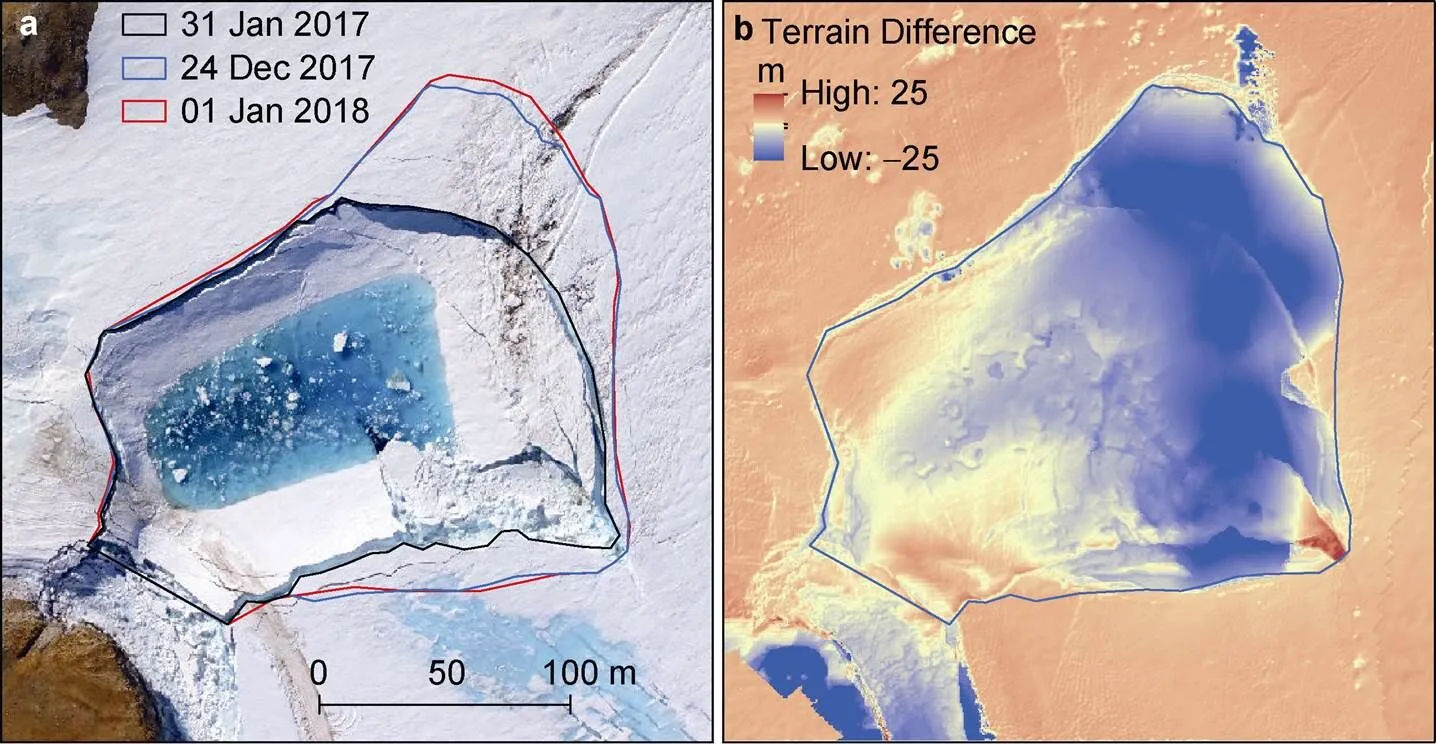
Figure 1 The evolution of an ice doline in East Antarctica was mapped by the repeated UAV surveys. a, Area expansion; b,Surface subsidence. Adapted from Li et al. (2020b).
2.3 Biology and ecology
Due to the fragile environment, the ecological survey in Antarctica is prohibitively difficult and strictly managed by international organizations. UAVs, however, offer new opportunities for wildlife and vegetation investigation in a non-intrusive way. Dozens of studies target the iconic species of the southern continent – penguins (Figure 2). The image processing software can extract the penguins’ colony and count their population from high-resolution orthomosaics in an unprecedentedly efficient way (Ji et al., 2019). On the other hand, UAVs are also used in lower vegetation monitoring. King et al. (2020) acquired spectral information by drones to determine the biodiversity status of the polar ecosystem. In sum, UAVs meet the spatial scale requirement of ecological investigation and alleviate the threat of disturbing behaviors.
2.4 Atmospheric and oceanic sciences
Equipped with appropriate payloads, the UAV can be leveraged to precisely sample the key variables in meteorological and oceanographic studies. Such metrics help to deepen our knowledge of air-sea-ice energy interactions. For example, scientists from the University of Colorado sampled seven parameters over Terra Nova Bay polynya, including air temperature, wind, pressure, relative humidity, radiation, skin temperature, and GPS coordinates (Cassano et al., 2016). To improve the weather forecasting skills, recently Chinese, Finnish and Norwegian meteorologists recently collaborated to assimilate radiosonde and UAV data into the Polar version of the Weather Research and Forecasting (Polar WRF) models. Dependent on the specific case, the UAV data revealed small to moderate impacts on on-site numerical weather prediction (NWP) (Sun et al., 2020).
3 Safety guarantee
Undoubtedly the life security of expedition members is the most critical consideration in any field operations. The UAV could contribute to the safety guarantee in the planning phase.
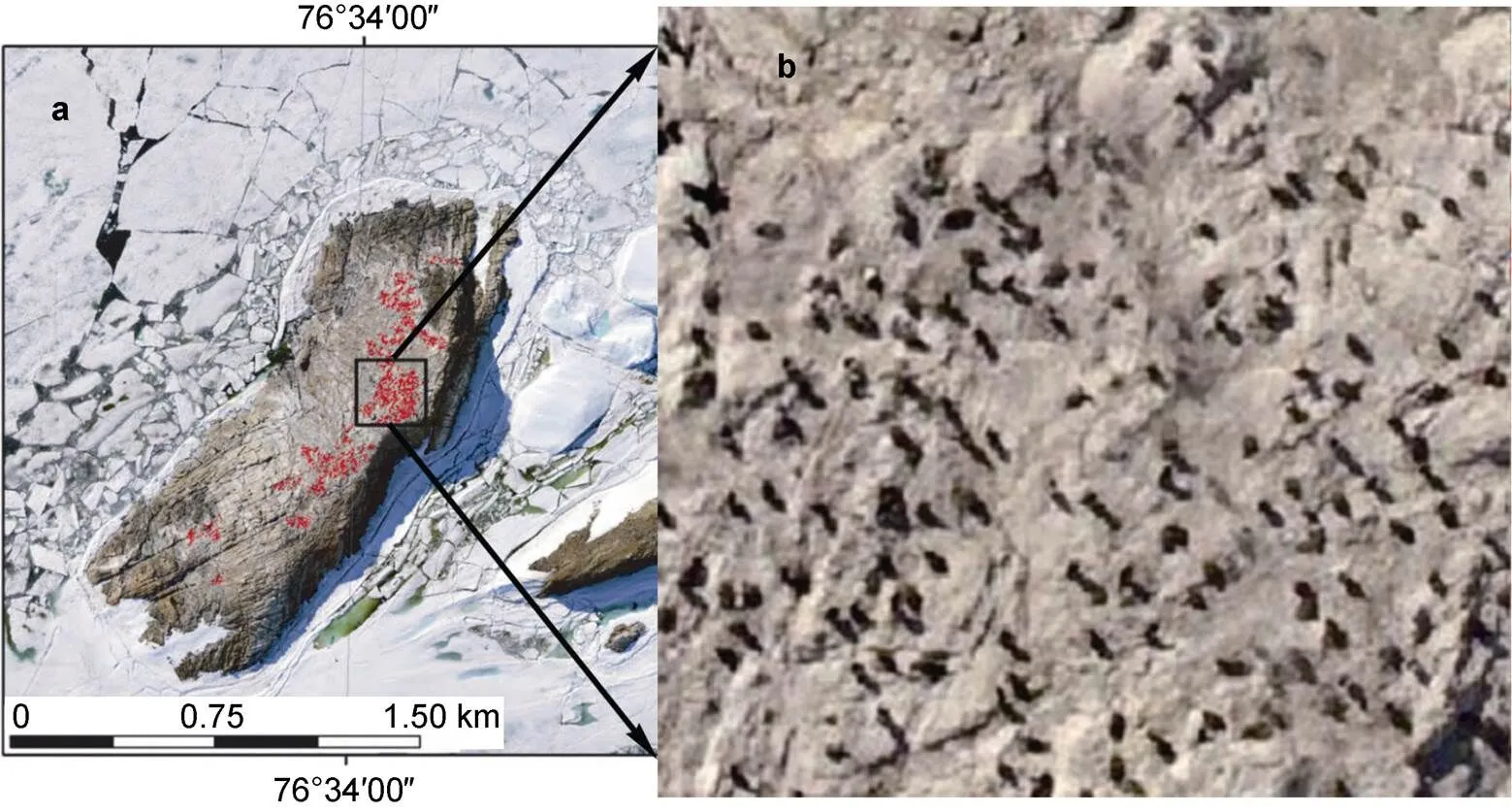
Figure 2 The wildlife population survey by UAV. a, An Adelie penguins’ colony on a small rock island; b, Zoomed scene to count the individual penguin. Adapted from Ji et al. (2019).
3.1 Icebreaker navigation
Accurate knowledge about meteorological and oceanic conditions is required for ship navigation in the polar ocean. In this respect, it is convenient for the UAVs to probe the nearby atmosphere (Sanderson, 2008), sea ice (Rennie, 2015), and iceberg (McGill et al., 2011) in a near-real-time manner. Traditionally, the weather forecaster needs accurate observations about the atmosphere and ocean status to guide the icebreaker in the Southern Ocean. By far these parameters rely on coarse satellite imagery and onboard instruments (Hui et al., 2017; Sun et al., 2018). Alternatively, the UAV can operate at the intermediate level between them. From Holland et al.’s successful tests (2001), it is feasible to employ the UAV collecting atmospheric variables, therefore assisting the forecaster to analyze the final-scale weather system and making better predictions. Sea ice conditions and drifting icebergs could threaten the shipping in the polar ocean as well. For example, the iceberg collision accident that occurred on 19 Jan 2019 indicates the deficiency of the onboard radar and personal experience (Li, 2019). The timely UAV surveys may help to identify and track nearby risks. The captain could adjust the course to avoid similar tragedies according to the inspection products.
3.2 Transportation on sea ice
The R/Vusually re-supplies for the Antarctic stations by snowcat transportation on sea ice. When the vessel approaches the station every austral summer, pathfinders have to travel on unstable fast ice to search for the commute course (Figure 3a). To avoid such arduous work, we tested the sea ice mapping capability of the fixed-wing UAV in the 33rd CHINARE (Li et al., 2019) (Figure 4a). Figures 5a and 5b show that the orthophotos can resolve the fine-scale surface features, which helps the experts to locate a faster and safer passage on the sea ice between the icebreaker and Zhongshan Station. When optimizing the ice path, experts aim to achieve three objectives at the same time, namely: (1) to improve the transit efficiency, (2) to save the energy consumption, and (3) to reduce unnecessary in-situ access (Dammann et al., 2018). To some extent, the UAV surveys avoid the drawbacks of the dangerous field investigations and the costly helicopter inspections.
3.3 Inland crevasse detection
Crevasses, as a direct result of englacial stress, scatter around the ice sheet. They reflect the dynamic history of glacier flows but could cause serious logistic troubles during the inland explorations (Whillans and Merry, 2001) (Figure 4b). Like route planning on the sea ice, traditionally expedition teams rely on human inspection to detect and circumvent those hazards. In the unexplored inland, we cooperated with the Russian team and set up a specially-designed flight on 16 Dec 2018 to detect potential risk on the way towards the Amery Ice Shelf. A group of crevasses is discernible from the UAV orthomosaic, which serves as the early warning before directing the heavy snowcats (Figure 3c). This case manifests that the UAV overcomes the weak photogrammetric matching over the featureless ice fields. Compared with the previous pathfinder methodology, UAV could uncover the danger zone at a large spatial scale (Florinsky and Bliakharskii, 2019).

Figure 3 Two representative safety risks during the Antarctic exploration. a, The pathfinders encountered a narrow tidal crack (Hui et al., 2016) when they were trying to find a feasible transportation course on the landfast sea ice; b, The snowcat just passed across a hidden surface crevasse on the way to Dome A.

Figure 4 In-field photos. a, Launchingon sea ice, with R/Vicebreaker about 400 m behind (03 Dec 2016); b, Modulating ground station in a joint inland Antarctic Ice Sheet expedition with Russia (16 Jan 2018). Adapted from Li et al. (2019).
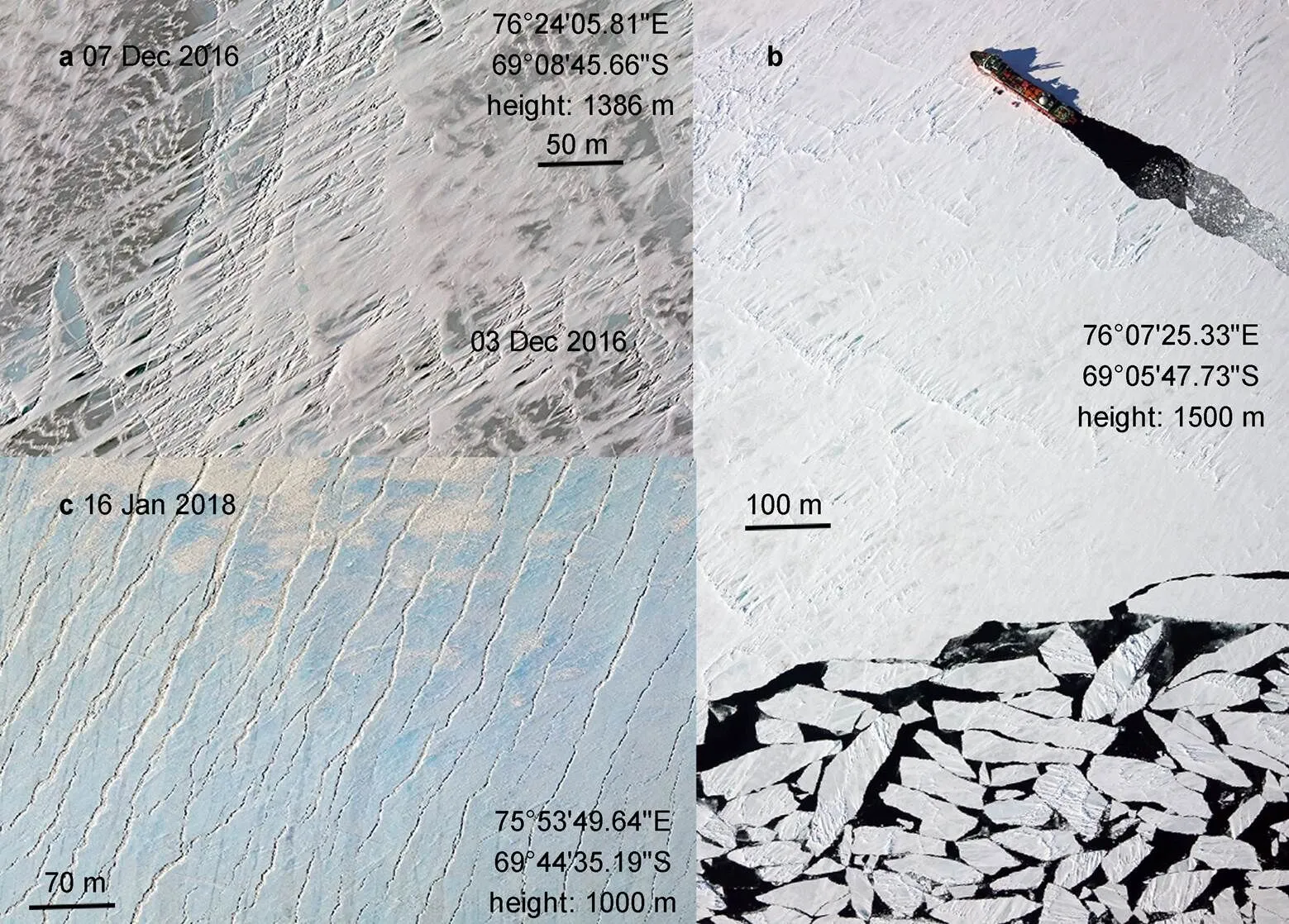
Figure 5 The added value of UAV to guide logistical planning on ice. a, The rough pressure ridges with dotted melting depression on landfast ice, which is not suitable for snowcat travelings; b, The UAV captured the moment when R/Vwas trying to break into the collapsing landfast ice outside of Zhongshan Station; c, High-resolution UAV orthomosaic reveals a group of parallel surface crevasses on the way from the Zhongshan Station to the Amery Ice Shelf.
3.4 Emergency rescue
The capabilities of the UAVs in emergencies have been already illustrated in natural disasters such as earthquakes (Xu et al., 2018), wildfire (Hossain et al., 2019), and landslides (Giordanet al., 2015). Without the clutter interference, the UAV, under the pre-defined courses, can reach out for more than 10 km in the Antarctic environment. This suggests the UAV could be readily deployed for physical contact over long-range, such as getting into and out of inaccessible sites. In other words, it might be unnecessary to ferry back and forth between the R/Vand the MVfor the helicopter, if the UAVs were equipped then in the rescue mission in December 2013 (Zhai et al., 2015). The UAV achieves the same goals in a more flexible way such as delivering a small amount of food, medicine, accessories, and other supplies in urgent need. Besides, the latest UAV model with a “life signs detector” can pinpoint the members who lose communication with the base camp via a broad screen (Al-Naji et al., 2019).
4 Construction management
Different from the conventional environment, the engineering work in Antarctica demands more special concerns considering the extreme climate and limited repairs. Below is shown an example of site-selection for an ideal runway, as one of important capacity building projects in Antarctica.
The Chinese polar expedition team is searching for an ideal site near the Zhongshan Station for the prospect ice sheet airfield, as the runway for the fixed-wing aircraftand forthcoming aircrafts. Glaciologists and construction engineers preliminarily narrowed down the ‘blue-ice’ extent by high-resolution satellite imagery based on a set of geospatial and mechanical criteria (Cui et al., 2019). To acquire the detailed surface texture and relief over one of these candidate sites, the Chinese and Russian team assigned a bespoke flight on 16 Jan 2018 (Markov et al., 2019). The UAV outputs facilitate discriminating the true blue-ice from hard blue firn, meanwhile, the flattening volume of such construction projects could also be estimated from the DEM. To sum up, our UAV data are serviceable to analyze 6 of 7 rules proposed in Cui et al. (2019) except for wind direction.
5 Education and outreach service
The public education and outreach services are the responsibilities of polar researchers, and the UAV records would promote such activities. For example, the exquisite 3D model of the polar environment would yield an interactive geospatial experience for anyone interested (Figure 6). Together with the augmented reality (AR), ROSETTA-Ice team realized the immersive visualization of ice shelf internal structures (Boghosian et al., 2019). In this recent publication, the authors claim that such new technology serves as an effective way for scientific communication to the public. The multi-scale and multi-disciplinary datasets collected by the UAV are promising sources to feed into similar platforms. It might not only help the new members to familiarize the strange environment before the deployment but also inspire the next generation of polar scientists.
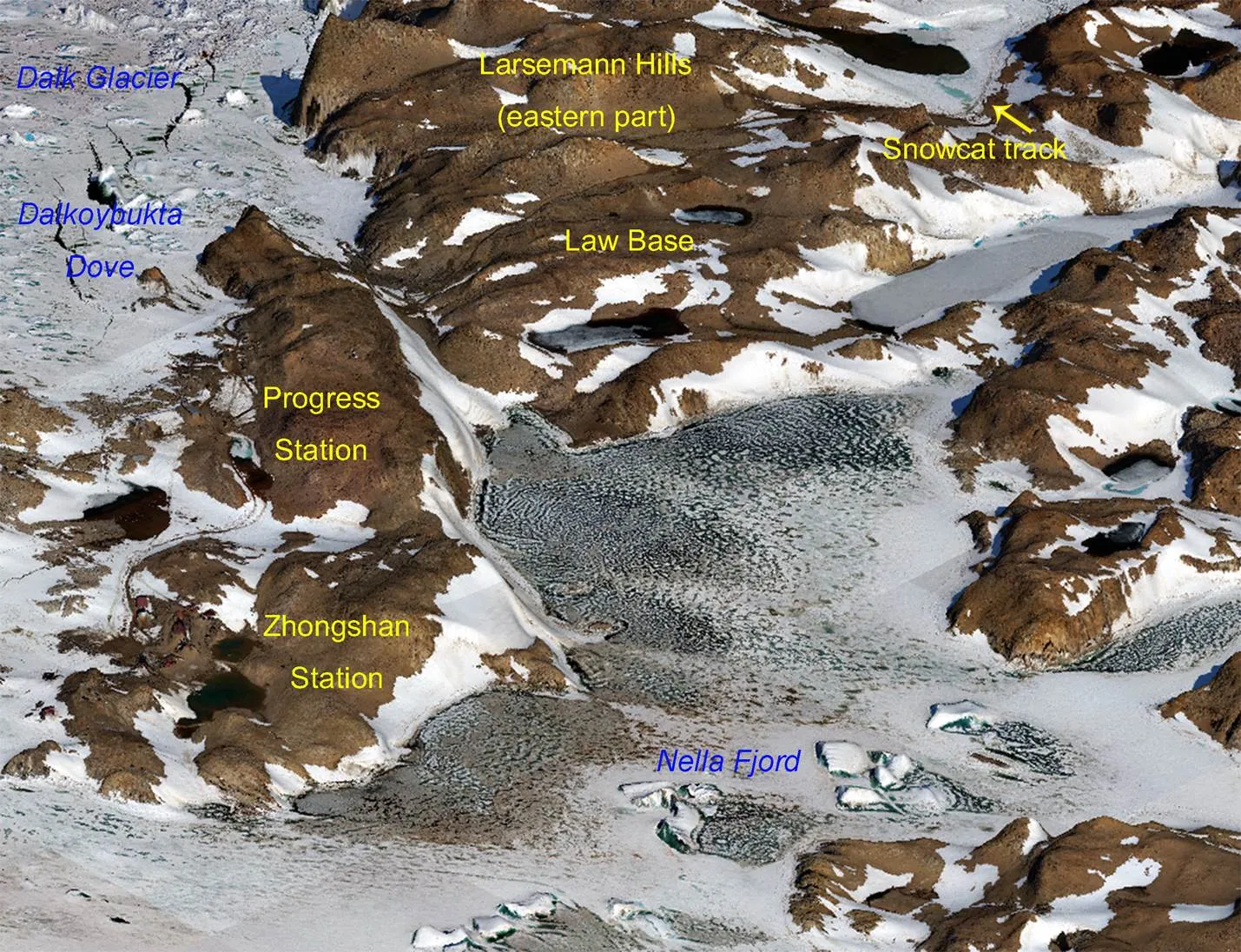
Figure 6 An overview of Zhongshan Station and surrounding eastern Larsemann Hills from the UAV’s perspective (01 Jan 2018).
6 Discussions
Compared with other remote sensing platforms, UAVs seem to attain a balance between high efficiency and low cost, not to mention they are easy to transport and flexible to operate (E et al, 2018). However, UAVs, like all other technology, cannot solve all problems at once. It is necessary to discuss the concerns of present research then to point out the potential solutions and future directions.
Usually, the first problem UAV operators encounter in Antarctica is the severe weather conditions, especially the strong wind and low temperature. Nevertheless, it is reported that the special aerodynamic designing and storing body material can enhance the capabilities to resist winds (Goraj, 2014). Since the development of satellite navigation and micro-electronics have reformed the flight control system, the UAVs seldom suffer from navigation errors with onboard units. However, operators should check the geology map to avoid the geomagnetic anomaly, or re-calibrate the navigation system if necessary; otherwise, the azimuth direction would drift away from the pre-defined flight courses. If the mission requires positional accuracy of less than 1 m, stationary GPS bases are essential. Thanks to the pure electromagnetic environment in Antarctica, it is possible for long-range (>10 km) microwave communication between the vehicle and ground station.
It is worth noting that some challenges come from environmental management. As we mentioned before, the potential noise disturbing for wildlife during the UAV survey in Antarctica has already raised someone’s concerns (Rümmler et al., 2015). UAVs are burgeoning therefore the research on their environmental impacts still lacks. According to the Leary (2017), the vehicle and investigator have to keep at least 100 m to minimize the adverse physiological effects. We encourage further collaborative investigation, from which the international colleagues can share their experiences and set-up a comprehensive conduct protocol (COMNAP UAS Working Group, 2016).
Rotor-wing UAVs are another primary category although fixed-wing platforms are more widely used in professional scenarios. Both kinds of UAVs share certain similar advantages and limitations for Antarctic research, such as wind resistance and battery lifespan. Comparatively speaking, rotor-wing models are more flexible in small-scale applications but at the expense of stability and loading. Even only one expeditioner can take the model and handle most operations in the field. On the other side, cars or snowcats are inevitable to transport an industrial-grade fixed-wing UAV model, making it unwieldy to deploy. But the fixed-wing models manage to load heavy and professional sensors like radar, with a little refitting.
From the Chinese experiments so far, it is aware that new UAV models are not fully compatible with the existing infrastructure. For example, there is limited space to manipulate the UAV onboard R/Vor around the Zhongshan StationHowever, the icebreaker navigation studies by foreign colleagues lend us confidence in such utilities despite we have not tested it yet. To circumvent the problem, we are developing a new type of model – VTOL (Vertical Take-Off and Landing), which is less susceptible to the taking-off field (Jouvet et al., 2018). Another future direction points to the integration with diverse sensors. For example, it is not able to detect the hidden crevasses covered by the fresh snow for optical cameras. We intend to mount more advanced payloads, including the synthetic aperture radar (SAR) and ground-penetrating radar (GPR), from which the subsurface structures could be interpreted as well (Cui et al., 2017).
To summarize the status quo of UAVs used in Antarctica, we find that their consecutive voyage could range from ~1 km (battery-powered rotor-wing model) to more than 50 km (gasoline-powered fixed-wing model), the wingspan size could range from 0.5 m to 3 m, the net weight could range from about 1 kg to more than 30 kg, the carrying capacity could range from less than 1 kg to ~ 10 kg. Besides the two directions we mentioned above, namely the new VTOL model and multiple sensor integration, some more developments worth researchers’ attention as well. We put forward another three suggestions for the future: (1) Developing new models that could take off and land in water, which would extend UAV’s application scenarios; (2) Investing more resources to improve battery material, which would lengthen the time span of the UAV missions in a cold environment; (3) Promoting long-term monitoring projects, in which the time-series datasets allow for thorough scientific questions.
7 Concluding remarks
As the hardware and software become mature, the UAVs act more and more as a flexible airborne platform. In this trend paper, we summarize their contributions to assist the Antarctic expeditions in various scenarios. Although most of the practices are just exploratory, our founding sufficiently highlights the UAVs’ added-value in risk control, project management, and science popularization, et al. In certain dangerous zones, the UAV could rapidly respond to natural hazards or humanitarian disasters, avoid personal access and strengthen safety. The conventional atmospheric and oceanic observations and engineering work can also be benefited from the datasets acquired by UAV. Lastly, the derived products would attract more public engagement and help to raise community awareness of the urgent climate change crisis.
Although the UAVs enjoy the advantages mentioned above, it is worth noting that our intention is not to “replace” any adopted techniques. Instead, we claim the UAV as a valuable supplement to the existing logistical infrastructure, based on which systematic cooperation could further promote the capability of polar exploration and support scientific research. Based on various sensors and robust models, we facilitate establishing a collaborative and integrated framework to support the operational airborne surveying for the Chinese Antarctic expedition roadmap. Moreover, it is believed that in the near future, the UAVs would become strategically significant even as the indispensable equipment for the polar expedition of all countries, yet there is always room for improvement. We appeal to strengthen the related research and explore more practical applications.
Acknowledgments This work was supported by the National Natural Science Foundation of China (Grant nos. 41830536, 41676176 and 41676182), the Chinese Polar Environment Comprehensive Investigation and Assessment Program. Teng Li is also funded by the UK-China Joint Research and Innovation Partnership Fund PhD Placement Program. Gratitude ought to be expressed to all members in 33rd and 34th CHINAREs, Yueqian Tech. and Feima Robotics for their valuable support. We would like to thank three reviewers (Sergey Popov, and two anonymous reviewers) and Associate Editor, Dr Joohan Lee for their valuable suggestions and comments on further improvement of this article.
Al-Naji A, Perera A G, Mohammed S L, et al. 2019. Life signs detector using a drone in disaster zones. Remote Sens, 11(20): 2441, doi: 10.3390/rs11202441.
Bhardwaj A, Sam L, Akanksha, et al. 2016. UAVs as remote sensing platform in glaciology: present applications and future prospects. Remote Sens Environ, 175: 196-204, doi: 10.1016/j.rse.2015.12.029.
Bliakharskii D P, Florinsky I V, Skrypitsyna T N. 2019. Modelling glacier topography in Antarctica using unmanned aerial survey: assessment of opportunities. Int J Remote Sens, 40(7): 2517-2541, doi: 10.1080/ 01431161.2019.1584926.
Boghosian A L, Pratt M J, Becker M K, et al. 2019. Inside the ice shelf: using augmented reality to visualise 3D lidar and radar data of Antarctica. Photogramm Rec, 34(168): 346-364, doi: 10.1111/phor. 12298.
Cassano J J, Seefeldt M W, Palo S, et al. 2016. Observations of the atmosphere and surface state over Terra Nova Bay, Antarctica, using unmanned aerial systems. Earth Syst Sci Data, 8(1): 115-126, doi: 10.5194/essd-8-115-2016.
Chen L Q, Liu X H, Bian L G, et al. 2017. Overview of China’s Antarctic research progress 1984–2016. Adv Polar Sci, 28(3): 151-160, doi: 10.13679/j.advps.2017.3.00151.
COMNAP UAS Working Group. 2016. Antarctic Unmanned Aerial Systems (UAS) operator’s handbook. https://documents.ats.aq/ ATCM39/att/ATCM39_att011_e.pdf.
Cui X B, Liu J X, Tian Y X, et al. 2019. GIS-supported airfield selection near Zhongshan Station, East Antarctica, based on multi-mission remote sensing data. Mar Geod, 42(5): 422-446, doi: 10.1080/ 01490419.2019.1645770.
Cui X B, Wang T T, Sun B, et al. 2017. Chinese radioglaciological studies on the Antarctic ice sheet: progress and prospects. Adv Polar Sci, 28(3): 161-170, doi: 10.13679/j.advps.2017.3.00161.
Dammann D O, Eicken H, Mahoney A R, et al. 2018. Traversing sea ice—linking surface roughness and ice trafficability through SAR polarimetry and interferometry. IEEE J Sel Top Appl Earth Obs Remote Sens, 11(2): 416-433, doi: 10.1109/JSTARS.2017.2764961.
E D C, Wang Z M, Zhang S K. 2018. Progress in Chinese Antarctic geodetic remote sensing. Adv Polar Sci, 29(2): 78-86, doi: 10.13679/j. advps.2018.2.00078.
Florinsky I V, Bliakharskii D P. 2019. Detection of crevasses by geomorphometric treatment of data from unmanned aerial surveys. Remote Sens Lett, 10(4): 323-332, doi: 10.1080/2150704X.2018. 1552809.
Funaki M, Hirasawa N. 2008. Outline of a small unmanned aerial vehicle (Ant-Plane) designed for Antarctic research. Polar Sci, 2(2): 129-142, doi: 10.1016/j.polar.2008.05.002.
Gaffey C, Bhardwaj A. 2020. Applications of unmanned aerial vehicles in cryosphere: latest advances and prospects. Remote Sens, 12(6): 948-988, doi: 10.3390/rs12060948.
Giordan D, Manconi A, Tannant D D, et al. 2015. UAV: Low-cost remote sensing for high-resolution investigation of landslides. 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). July 26–31, 2015, Milan, Italy. IEEE, 5344-5347. doi: 10.1109/IG ARSS.2015.7327042.
Goraj Z. 2014. A specialized UAV for surveillance in windy, turbulent environment of the Antarctic coast. Petersburg, Russia: Proceedings 29th Congress Int Council Aeronautical Sci.
Holland G J, Webster P J, Curry J A, et al. 2001. The aerosonde robotic aircraft: a new paradigm for environmental observations. Bull Amer Meteor Soc, 82(5): 889-901, doi: 10.1175/1520-0477(2001)082<0889: taraan>2.3.co;2.
Hossain M, Zhang Y, Yuan C. 2019. A survey on forest fire monitoring using unmanned aerial vehicles. Shanghai, China: 3rd International Symposium on Autonomous Systems (ISAS).
Hui F M, Li X Q, Zhao T C, et al. 2016. Semi-automatic mapping of tidal cracks in the fast ice region near Zhongshan Station in East Antarctica using Landsat-8 OLI imagery. Remote Sens, 8(3): 242-257, doi: 10.3390/rs8030242.
Hui F M, Zhao T C, Li X Q, et al. 2017. Satellite-based sea ice navigation for Prydz Bay, East Antarctica. Remote Sens, 9(6): 518-538, doi: 10.3390/rs9060518.
Ji M, Zhang B G, Zhang Y Y, et al. 2019. Sizing and trend analysis of penguin numbers in Antarctic from high resolution photography by unmanned aerial vehicles. J Beijing Norm Univ Nat Sci, 55(1): 25-35, doi: 10.16360/j.cnki.jbnuns.2019.01.004 (in Chinese with English abstract).
Jouvet G, Weidmann Y, Kneib M, et al. 2018. Short-lived ice speed-up and plume water flow captured by a VTOL UAV give insights into subglacial hydrological system of Bowdoin Glacier. Remote Sens Environ, 2018(217): 389-399, doi: 10.1016/j.rse.2018.08.027.
King D H, Wasley J, Ashcroft M B, et al. 2020. Semi-automated analysis of digital photographs for monitoring east Antarctic vegetation. Front Plant Sci, 11: 766-781, doi: 10.3389/fpls.2020.00766.
Leary D. 2017. Drones on ice: an assessment of the legal implications of the use of unmanned aerial vehicles in scientific research and by the tourist industry in Antarctica. Polar Rec, 53(4): 343-357, doi: 10.1017/s0032247417000262.
Leuschen C, Hale R, Keshmiri S, et al. 2014. UAS-based radar sounding of the polar ice sheets. IEEE Geosci Remote Sens Mag, 2(1): 8-17, doi: 10.1109/MGRS.2014.2306353.
Li L. 2019. No reported injuries after icebreaker’s collision with Antarctic iceberg. [2019-01-21]. http://www.chinadaily.com.cn/a/201901/21/ WS5c45b702a3106c65c34e5ac1.html.
Li T, Zhang B G, Cheng X, et al. 2019. Resolving fine-scale surface features on polar sea ice: A first assessment of UAS photogrammetry without ground control. Remote Sens, 11(7): 784-806, doi: 10.3390/rs11070784.
Li T, Zhang B G, Cheng X, et al. 2020a. Applications of the UAVs in the Antarctic scientific research: progress and prospect. Geomatics Info Sci Wuhan University, doi: 10.13203/j.whugis20200098 (in Chinese with English abstract).
Li T, Zhang B G, Xiao W, et al. 2020b. UAV-based photogrammetry and LiDAR for the Characterization of ice morphology evolution. IEEE J Sel Top Appl Earth Obs Remote Sens, 13: 4188-4199, doi: 10.1109/jstars.2020.3010069.
Markov A, Polyakov S, Sun B, et al. 2019. The conditions of the formation and existence of “blue ice areas” in the ice flow transition region from the Antarctic ice sheet to the Amery Ice Shelf in the Larsemann Hills area. Polar Sci, 22: 100478-100488, doi: 10.1016/j.polar.2019.08.004.
McGill P R, Reisenbichler K R, Etchemendy S A, et al. 2011. Aerial surveys and tagging of free-drifting icebergs using an unmanned aerial vehicle (UAV). Deep Sea Res Part II: Top Stud Oceanogr, 58(11-12): 1318-1326, doi: 10.1016/j.dsr2.2010.11.007.
Miranda V, Pina P, Heleno S, et al. 2020. Monitoring recent changes of vegetation in Fildes Peninsula (King George Island, Antarctica) through satellite imagery guided by UAV surveys. Sci Total Environ, 704: 135295-135305, doi: 10.1016/j.scitotenv.2019.135295.
Pereira F, Marques J S, Heleno S, et al. 2020. Detection and delineation of sorted stone circles in Antarctica. Remote Sens, 12(1): 160-174, doi: 10.3390/rs12010160.
Rennie J. 2015. Aurora Australis uses drone technology to navigate sea ice. [2005-12-23]. http://www.antarctica.gov.au/news/2015/aurora-australis- uses-drone-technology-to-navigate-sea-ice.
Rümmler M C, Mustafa O, Maercker J, et al. 2018. Sensitivity of Adélie and Gentoo penguins to various flight activities of a micro UAV. Polar Biol, 41(12): 2481-2493, doi: 10.1007/s00300-018-2385-3.
Sanderson K. 2008. Unmanned craft chart the Antarctic winter. (2008-03-18). https://www.nature.com/articles/news.2008.680.
Sun Q Z, Vihma T, Jonassen M O, et al. 2020. Impact of assimilation of radiosonde and UAV observations from the Southern Ocean in the Polar WRF Model. Adv Atmos Sci, 37(5): 441-454, doi: 10.1007/ s00376-020-9213-8.
Sun Q Z, Zhang L, Meng S, et al. 2018. Meteorological observations and weather forecasting services of the CHINARE. Adv Polar Sci, 29(4): 291-299, doi: 10.13679/j.advps.2018.4.00291.
Westoby M J, Dunning S A, Woodward J, et al. 2016. Interannual surface evolution of an Antarctic blue-ice moraine using multi-temporal DEMs. Earth Surf Dynam, 4(2): 515-529, doi:10.5194/ esurf-4-515-2016.
Whillans I M, Merry C J. 2001. Analysis of a shear zone where a tractor fell into a crevasse, western side of the Ross Ice Shelf, Antarctica. Cold Reg Sci Technol, 33(1): 1-17, doi: 10.1016/S0165-232X(01) 00024-6.
Xu Z H, Wu L X, Zhang Z X. 2018. Use of active learning for earthquake damage mapping from UAV photogrammetric point clouds. Int J Remote Sens, 39(15-16): 5568-5595, doi: 10.1080/01431161.2018. 1466083.
Yuan X H, Qiao G, Li Y J, et al. 2020. Modelling of glacier and ice sheet micro-topography based on unmanned aerial vehicle data, Antarctica. Int Arch Photogramm Remote Sens Spatial Inf Sci, XLIII-B3-2020: 919-923. 2020 XXIV ISPRS Congress (2020 edition), doi: 10.5194/isprs-archives-xliii-b3-2020-919-2020.
Zhai M X, Li X Q, Hui F M, et al. 2015. Sea-ice conditions in the Adélie Depression, Antarctica, during besetment of the icebreaker R/V. Ann Glaciol, 56(69): 160-166, doi: 10.3189/2015aog69a007.
20 June 2020;
2 March 2021;
19 March 2021
, ORCID: 0000-0001-6910-6565, E-mail: chengxiao9@mail.sysu.edu.cn
10.13679/j.advps.2020.0018
: Li T, Zhang B G, Cheng X, et al. Leveraging the UAV to support Chinese Antarctic expeditions: a new perspective. Adv Polar Sci, 2021, 32(1): 67-74,
10.13679/j.advps.2020.0018
杂志排行
Advances in Polar Science的其它文章
- Information for authors
- Editorial Note
- Assessment on India’s involvement and capacity-building in Arctic Science
- Complete genome analysis of bacteriochlorophyll a-containing Roseicitreum antarcticum ZS2-28T reveals its adaptation to Antarctic intertidal environment
- Seabird and marine mammal at-sea distribution in the western Bering Sea and along the eastern Kamtchatka Peninsula
- Biomarker records of D5-6 columns in the eastern Antarctic Peninsula waters: responses of planktonic communities and bio-pump structures to sea ice global warming in the past centenary