前视扫描声呐成像径向误差分析和补偿
2021-04-06刘烨瑶李欣国涛郭卫振廖佳伟
杨 波 汪 伟 刘烨瑶 李欣国 梁 涛郭卫振 廖佳伟 潘 锋
①(中国科学院声学研究所 北京 100190)
②(北京海洋声学装备工程技术研究中心 北京 100190)
③(中国科学院大学 北京 100049)
④(中国科学院信息工程研究所 北京 100093)
1 引言
单波束前视扫描声呐广泛应用于水下机器人、载人潜水器等运动平台。由于其机械扫描的工作特性产生了以下两个问题:为了获取较快的成像速度,机扫声呐角度步进较大,导致分辨率较低;水下载体快速航行引起声学中心的位置变化,影响成像效果。这些影响将会增加后续避障[1]、目标检测[2]、特征提取[3]、目标识别[4]、跟踪[5–7]等功能的难度。
针对第一个问题,许多研究者引入了插值的方法获得高分辨率图像。最邻近插值法[8]用距离待插值点最近的整数坐标点像素值替代该点,算法简单、速度快,但图像会出现方块效应和锯齿效应。双线性插值法[9]将待插值点的灰度用与该点周围4个点的灰度值线性拟合而成,比最邻近插值平滑、运算速度较快,但平滑操作损失了图像中许多重要的高频信息。Keys[10]提出了用待插值点周围16个相邻点的灰度值加权平均来计算插值,相比双线性插值提高了插值精度,但不能很好地保持图像的细节部分。Trucco等人[11]将线性插值引入前扫声呐成像中,在极坐标中根据不同距离进行分段波束插值。Zhang等人[12]在Trucco的基础上进行改进,在波束域做拉格朗日2次插值,提高了图像质量。前面介绍的声呐图像都是基于前向映射,将极坐标系点映射到直角坐标系中得到的是非整数点,经四舍五入后导致极坐标系中点与直角坐标系中点形成多对一映射。寇贤聪[7]在前视声呐成像中引入了后向映射,解决了上述问题,图像更加平滑。Wang等人[13]在采用后向映射的同时,分别在波束域以及每个波束内进行了8点2次插值,解决了采样点稀疏的问题。本文在研究前人方法的基础上,采用后向映射方法映射出需要绘制的像素点在极坐标系的坐标,在极坐标系作双线性插值得到准确位置像素点的值,然后重构图像。
对于运动平台的前视扫描声呐成像,载体在水下航行时图像将会产生径向误差。载体运动对前视扫描声呐成像的影响,前人分析的多是载体的姿态变化对前视扫描声呐成像的影响。梁艳[14]介绍了利用DVL(声多普勒计程仪)测得的速度和姿态对前视扫描声呐图像中目标物的位置进行校正,补偿了由于载体运动造成的图像失真。但梁艳直接将前视扫描声呐测得目标数据当作目标在水平面中与声呐的距离,然后在水平面中对目标位置进行校正,忽略了声呐测得的目标距离是在空间中斜距。前视扫描声呐成像显示并不是目标在水平面中的距离,而是根据目标与声呐阵的距离映射到水平面中。本文通过建立载体运动模型,分析载体运动时目标成像的径向误差,推导出图像域运动补偿量,并用泰勒公式对补偿量进行化简。随后用简化的补偿量处理前视声呐回波数据,并与未经运动补偿的图像进行比较,经过运动补偿的图像能准确表示目标整体信息,验证了图像域近似运动补偿的有效性。
2 单波束前视扫描声呐成像系统
单波束前视扫描声呐每次定时发射一个具有一定脉宽的信号,在某个固定方向形成一个探测波束。接收回波就能获得该方向上物体信息。对回波信号进行采样并与本地信号进行相关,相关结果代表了该方向不同距离回波强度。在发射回波后经过一段固定时间,按固定角度步进自动转动声呐阵,进入第2个方向扫描。经过多次转动就可获得一个扇区的回波信息。
3 后向映射及插值成像
基于单波束前视扫描声呐工作特点,为提高成像速度需增大角度步进,从而导致波束间隔变大,生成的图像间隙较大,容易产生马赛克现象。成像前需要对波束数据作插值处理,再将极坐标数据转换成笛卡儿坐标数据。转换后的坐标需要进行四舍五入取整,导致近距离的像素点会被多次计算,产生像素模糊,远距离的像素点反而会缺失灰度值。坐标点经四舍五入后位置与真实位置会产生偏差。基于上述因素考虑本文采用后向映射成像方法[9],即在笛卡儿坐标系下对像素进行处理。将需要重绘的像素坐标映射至极坐标系,在极坐标系下查找以及插值。
具体实现时根据单波束前视扫描声呐机械扫描面的工作特点,每接收到1ping数据,只更新当前ping区域的图像灰度值。这样不仅加快了成像速度,也减少了计算量。首先要确定需要在笛卡尔坐标系下重绘的区域,如图1中两根红线之间的小扇形区域,可以根据前1ping和当前ping的角度来确定。
先计算出小扇形区域的两条边界线,即

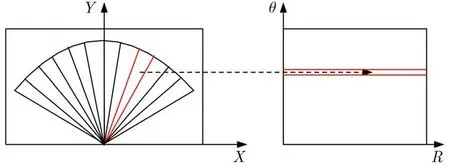
图1 坐标转换
其中, H是前视扫描声呐输出的转动方向,i 表示ping计数。然后在笛卡儿坐标系下矩形区域,逐行搜索需要映射的像素点。其中矩形区的像素为512×256。小扇形区的每一行的起始像素点可由l1计算出,终止像素点由l2计算出。第m 行的起始像素点为 (256 −m)/(tan(H(i)/180×π)),终止像素点 为 (256 −m)/(tan(H(i −1)/180×π))。实 际搜索的区域由小扇形区近似成三角区。然后在极坐标系中对径向距离超过250的点直接赋值0,从而删除超出小扇形区的点。后向映射的坐标转换公式为


其中, m, n 分别是像素点的行和列,α , r 分别是极坐标系下方向角和径向距离。由于接收的波束数据是以方向角为行、径向距离为列的矩阵进行存储,后向映射点的坐标 α需要转换成矩阵的行。具体转换公式为

其中,前视扫描声呐的波束数据的方向角范围为±67.2◦, 波束角度步进为2.4°, θ, r分别是存储矩阵的行和列。
本文采用的双线性插值在波束方向和径向都做线性插值。具体作法如图2所示。
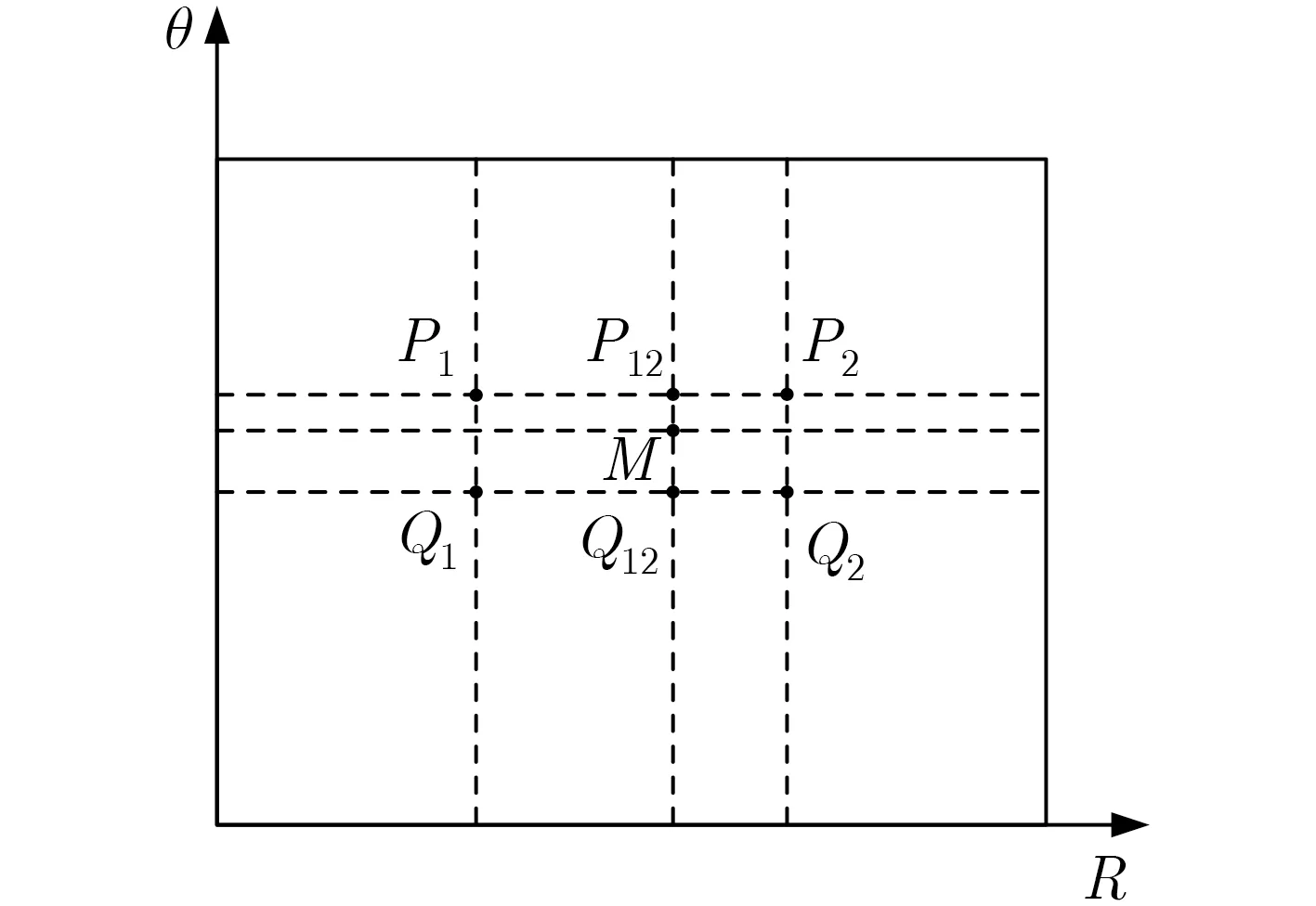
图2 双线性插值
根据后向映射求得 M点坐标,经过向下、向上取整找到相邻的 P1, P2, Q1和Q24 点。P1和P2作线性插值得到 P12, Q1和Q2作线性插值得到Q12,之后P12和Q12作线性插值得到M 。
4 图像域运动补偿
载体运动会使得声学中心与目标点的相对位置发生变化,同一目标点在不同ping的扫描角度也会产生差异。由于前视扫描声呐的工作特性是每更新1ping数据,刷新一次图像。这样更新一个完整的扇形图像,从第1ping到最后1ping需要一个较长的时间。更新时间计算公式为

其中, θ是机扫的半个扇区的角度,∆ θ是机扫角度步进量, ∆t表示机扫步进一次时长。“深海勇士号”载人潜水器在水下最大航速1.25 m/s,扇区范围± 67.2◦,角度步进2.4°,角度步进时长0.14 s,机扫整个扇区,潜水器会前进9.8 m。声呐实际工作距离50 m,对于一个扇形区内,第1ping和最后1ping成图在运动方向误差将近似达到作用距离的19.6%。这将直接影响后续图像处理以及操作人员判断。针对上述问题本文提出图像域运动补偿,即在每次成图前,考虑航行器的运动对成像影响。由于前视扫描声呐成像显示的并不是直接在水平面的投影,Hurtos等人[15]分析了前视声呐的成像投影模型。由于前视声呐成像与前视雷达成像有许多相似之处,本文在Hurtos的成像投影模型的基础上同时参考了张寅的运动平台前视雷达成像[16],在此基础上进行成像的径向误差分析。载体运动几何示意图如图3所示。
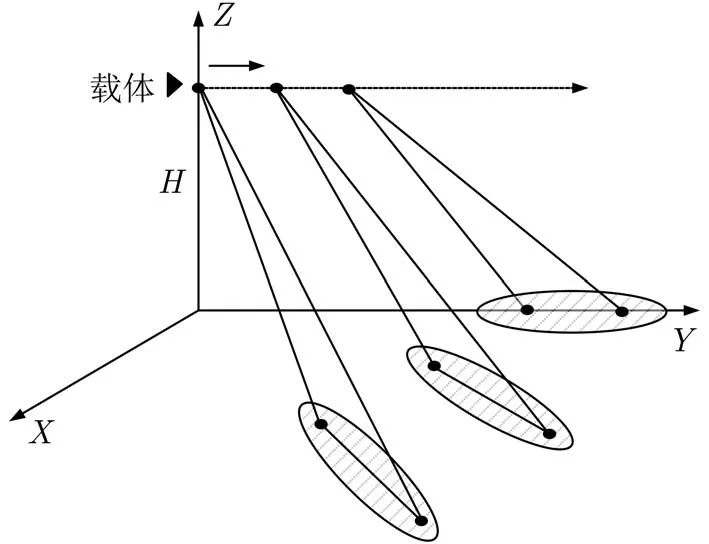
图3 前视声呐扫描成像几何示意图
载体在距底高度 Ht的 位置以速度vt沿箭头方向运动,前视声呐发射阵按速度 ω进行扫描。获得1ping载体与目标的距离后,将距离信息呈现在扇形图中。由于载体运动,在绘制当前ping数据时,上1ping的目标在当前图像中位置已发生变化。为了实时准确显示前视图像,需要知道目标在前视成像中不同ping的距离关系,并在当前ping成像时进行纠正。我们以前视成像区域中单个点目标为例,分析不同时刻载体与目标的距离如图4所示。
载体初始时刻 t0,与目标S (x,y)的 距离R0,发射阵的角度为θ 。在t 时刻,载体与目标的斜距可表示为
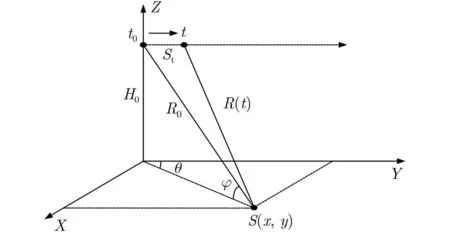
图4 不同时刻载体与目标的距离
径向误差表现在图像域,则体现在目标在载体运动方向的移动,如图5所示。
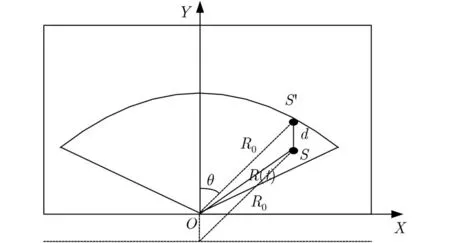
图5 目标在图像域径向误差
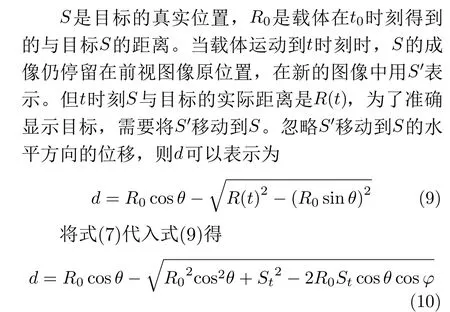
当 t 与t0的间隔为一个扫描步进时间间隔时,式(10)左边可以理解为∆ d,即为一次扫描步进需要补偿的量。当θ=0, φ =30, R0=20时,由式(10)可计算出 d =0.1514 m。前视声呐的频率f 为675 kHz,对应的波长λ 为0.0022 m。由此可见误差d 远大于波长,误差的补偿具有明显意义。可以对式(10)右边第2项进行泰勒展开,忽略2次项及高阶项得到:

当θ=0, φ =30, R0=20时,由式(11)可计算出∆d为0.1516,偏差仅为0.13%,能够满足补偿要求。式(11)可以理解为成像时显示的是一个与水平面夹角为 φ的平面,其中φ =arcsin(H0/R0), H0为t0时刻对底高度。水平面的移动需要对应拉伸到该平面内。每次成像在计算小扇区像素前,先将上次图像往声呐运动方向搬移 ∆d。加上运动补偿后再计算小扇区的像素,然后更新整幅图像。这样就能实时修正由载体运动带来的运动方向上误差。此处的∆ d 理论上需要根据目标的每个像素点对应的φ 计算得到,实际工作时可以根据声呐作用范围对∆ d 做近似处理,目标点取相同的∆ d 。
5 仿真结果
对一组实际采集的前视声呐数据分别进行前向映射不做插值、前向映射做2次插值、后向映射2次插值、后向映射双线性插值。具体的结果如图6所示。
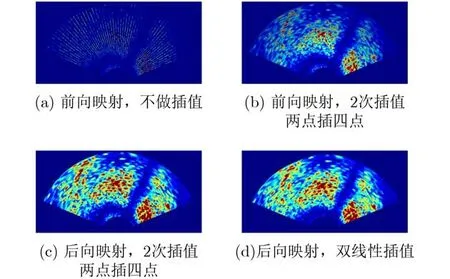
图6 4种插值成像
从图6(a)可以看出前向映射不做插值的图像中,各波束数据在远端有明显的间隙,经过2次两点插八点后图像间隙消除了,如图6(b)所示,但在远端形成了明显的蝶形图案。改为后向映射2次插值两点插四点后,可消除蝶形图案,但还存锯齿效应,如图6(c)所示。改为后向映射双线性插值后,可改善锯齿效应的影响,如图6(d)所示。
为了验证本文对前视声呐运动成像的补偿效果,选择一个长40 m的长条目标作为前视声呐成像的仿真目标。前视声呐设备距底高度10 m,目标位于前视声呐前方水平距离为20 m。分别对前视声呐静止、以1.25 m/s前进两种状态进行仿真。具体的仿真结果如下。
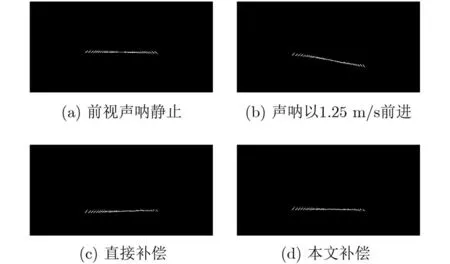
图7 声呐静止、前进、直接补偿、本文补偿对比
从图7(b)可以看出,前视声呐在前进时左侧的目标图像由于未及时更新而产生6.2 m的距离误差,约为工作距离的12.4%。图7(c)是直接利用声呐前进速度补偿未及时更新的目标的位置,左侧的目标与前视声呐的纵向距离偏差在减小,但补偿的量偏大,导致左侧目标与前视声呐的纵向距离更近,左侧目标图像距离误差达到约1.4 m,约为工作距离的2.8%。图7(d)采用的是本文的算法对目标进行补偿,可以看出左右两侧的目标与前视声呐的纵向距离基本一致,左右两端的偏差小于0.2 m,约为工作距离的0.4%。从上述仿真结果来看本文的算法能够补偿前视声呐前进造成的图像偏差,并且比直接补偿法效果更好。
6 实验结果
实验采用是在南海1000 m深度区域的前视数据。前视声呐的具体工作参数如表1所示。
前视声呐具体的图像后置处理流程如图8所示。
先用更新的单ping数据作后向映射、双线性插值得到小扇形区的图像。其余区域的图像通过之前生成的图像先根据艏向角变化进行旋转调整,然后进行图像域运动补偿来更新。图像域运动补偿采用第4部分推出的式(11),其中 vt通过传感器实时获取, t是单波束前视扫描声呐的声呐阵转动的步进时间间隔,可以通过设备参数获取, φ是通过传感器实时获取对底高度,并通过公式φ=arcsin(H/R)来获得,其中 H为对底高度,R 为声源与目标点的距离。利用得到 ∆d对上一次整个图像整体往声呐运动方向作搬移。然后再用图8中更新的小扇形区的数据替换补偿后图像的相应位置数据。然后输出的就是经过实时运动补偿的前视图像。数据用的是海试实验对海底观测的数据。
图9、图10和图11分别是潜水器连续航行时声呐阵按逆时针转动至33.6°, 0°和–33.6°时的前视成像。每一个位置都显示了不补偿、直接补偿和本文补偿3种成像结果,具体的偏差数值如表2所示。
从表2可以看出本文算法和直接补偿算法都能够补偿前视声呐前进造成的图像偏差,本文算法比直接补偿法效果更好。

表1 前视声呐工作参数
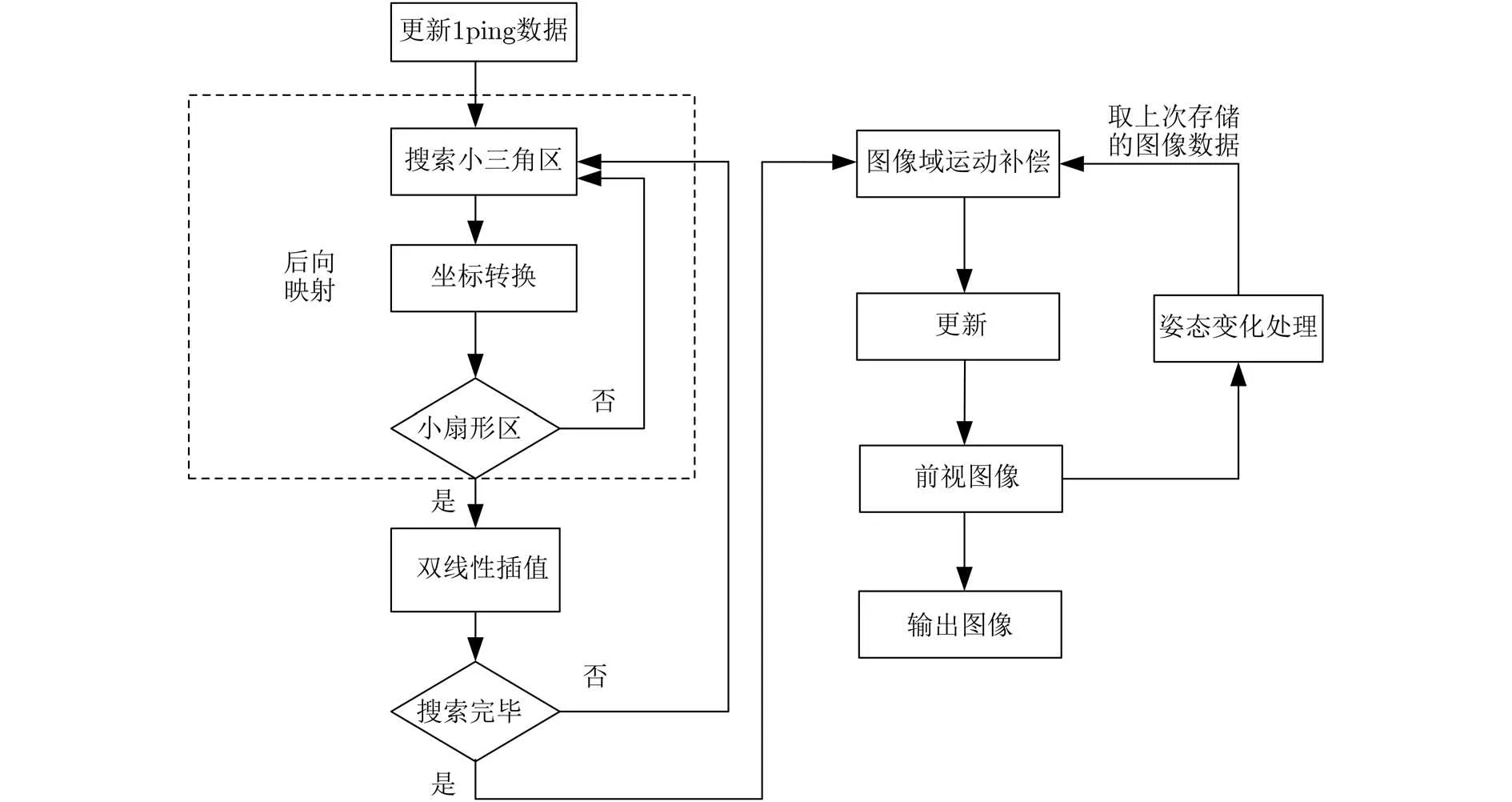
图8 前视图像后置处理流程

图9 逆时针转动至33.6°时成像

图10 逆时针转动至0°时成像

图11 逆时针转动至-33.6°时成像
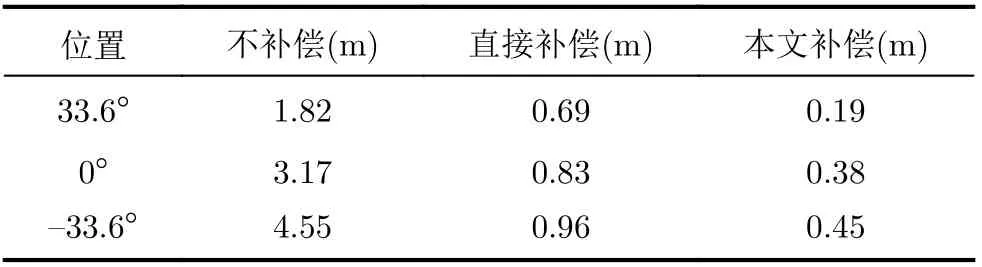
表2 前视声呐成像偏差
7 结论
本文分析了运动平台前视扫描声呐成像的各种插值方法的优缺点,在此基础上提出了一种基于后向映射、双线性插值和运动补偿相结合的成像方法。通过分析载体运动,推导出图像域径向误差和运动补偿量,并用泰勒公式展开进行简化。经过仿真和海试数据验证,经过运动补偿后的图像,纠正了不同ping之间的径向误差,能准确地表达目标信息。
