基于进场程序选择的进场航空器航迹规划
2021-04-06宋祥波
宋祥波,牟 磊,杨 越
(1.中国民航大学空中交通管理学院,天津 300300;2.中国民用航空西南地区空中交通管理局重庆分局,重庆 401120)
终端区空域范围内航空器的飞行活动以进离场为主,管制员在对终端区内进离场航空器进行管理时,对于进场航空器的调整所占比重较大。因此,规划好进场航空器飞行航迹,便于管制员快速高效地调配进场航空器流,提高终端区内航空器运行效率。
近年来,进场航空器的航迹规划问题得到广泛关注。目前,对终端区进场航空器航迹的研究主要集中在进场航空器的航班排序方面,研究人员通过运用相关算法为进场航空器生成相应的优化航迹,从而减少航班延误、减轻管制员工作负荷。Balakrishnan 等[1]将进场航空器调度问题演化为图论中的最短路径问题,引入约束位置转换限制并运用动态规划算法进行求解;Zhang 等[2]基于飞机性能数据库(BADA,base of aircraft data)数据对空管自动化进行建模和仿真,提出的运动学航迹生成器可为航空器生成从起飞机场到目的机场的整条航迹;Félix 等[3]利用性能数据库中给出的航空器模型提出了垂直剖面和水平导航算法相结合的航空器航迹优化方法;张军峰等[4]在精确四维航迹预测的基础上,结合管制运行约束,采用分支定界法对时间窗内进场航空器进行动态排序与调度研究。为提高算法运行速度,杜实等[5]利用元胞传输理论,以系统运行时间最短为目标,构建终端区进场航班规划模型;梁曼等[6]通过混合动态规划算法减小了计算量,实现了进场航空器的分组排序;张勰等[7]基于协同进化遗传算法解决进场航空器调度问题中的较多约束,克服了问题规模剧增导致的计算效率低下的难题。已有研究较好地解决了进场航空器的调度与排序问题,一些研究也给出了相应的航迹规划方案,但当前空管运行中航空器因受空域限制无法自由选择飞行路径而需要沿进场程序飞行,并辅之以管制员速度调整和适当雷达引导[8-9],优化后的航迹与实际情况仍有一定区别,使得优化结果虽然较好,但优化策略与实际一线管制单位运行需求相差较大,无法被管制员所接受。
考虑到中国当前空域环境,为提高进场航空器航班数量及减小飞行冲突,对终端区内进场航空器航迹进行规划研究。在机场现有进场程序的基础上建立航空器进场程序自动选择分配模型并仿真,计算得出的进场路径分配结果可在减轻管制员工作负荷与压力的同时保证进场航空器在终端区内安全高效运行。
1 问题描述
进场航空器进入终端区内,管制员会根据其进入的位置、时机和分布情况等,指挥其按预设程序完成进场、进近与着陆。在进场阶段,航空器通常采用标准仪表进场程序(STAR,standard instrument arrival),可采用传统导航方式,也可采用基于性能的导航(PBN,performance based navigation)方式。与传统导航方式相比,PBN 进场程序在设计时对进离场航空器的飞行程序进行了较好的分离,减少了进离场程序航段的重叠及不同程序共用同一航路点的情形,可有效解决航空器的汇聚冲突、进离场航空器的逆向冲突,减轻管制员对进场航空器进行调配时的压力和工作负荷[10]。由于目前各大中型机场终端区内均已具备PBN 程序的运行条件,以PBN 运行程序为基础对进场航空器的飞行航迹进行分析与规划具有重要的现实意义。
根据终端区管制要求,管制员需要为所有航空器配备水平间隔或垂直间隔[11],而对于进场航空器,由于航空器间有着陆间隔需求,为方便对其排序与最后进近着陆,管制员在指挥中通常更倾向于保证航空器之间的水平间隔。因此,对于进场航空器航迹规划的目标为:在实现终端区内进场航空器最大流量前提下,通过合理选择进场航空器的进场程序尽可能减少进场航空器的飞行冲突,辅助管制员对进场航空器进行排序,保证所有进场航空器在到达起始进近定位点(IAF,initial approach fix)后均具备足够的尾流间隔和着陆水平间隔,从而降低管制员的指挥难度和工作负荷。
在此目标下,当进场航空器到达进港点时,首先优先给航空器选择路径最短的进场程序,以使航空器进场飞行时间最短,加速终端区内空中交通流动。在进场航空器通过进港点后,通过计算找出进场航空器与其他航空器在每个进场航路交叉点是否存在冲突,当在航路交叉点遇到飞行冲突时,根据其预计进近时间进行冲突调配。首先,通过调整两架航空器的速度尝试解决(调整航空器速度时要根据进场航空器实际运行特点,在考虑航段速度限制的同时避免航空器先减速后加速),计算进场航空器到达IAF 点前是否具备足够的尾流间隔和着陆水平间隔。根据调整后的速度再次进行航路交叉点飞行冲突判断,当速度调整无法满足条件时,则调配后到达IAF 点的航空器选择使用其他进场程序,将坐标转化到调整后的进场程序上再次计算是否存在飞行冲突并按照该方法继续调整,直到该航空器比其他航空器先到达IAF 点或已无可调程序为止。如果航空器先到达IAF 点,则返回输出其进场路径,程序结束;如果航空器没有可调整的程序,表示航空器此时没有分配到进场路径,需要在进港点等待,直到有可用路径方可进场。算法流程如图1所示。
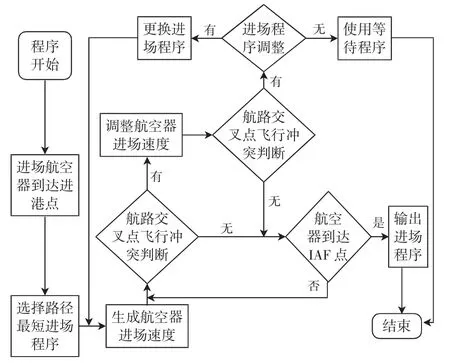
图1 算法流程图Fig.1 Algorithm flow chart
2 模型构建
2.1 模型描述
设定模型变量如表1所示。
首先,求解出终端区内所有进港点和航路交叉点坐标(xi,yi)。根据已知航段j 磁方向Ψj、航段j 起点坐标(xj,s,yj,s)和终点坐标(xj,e,yj,e),建立该航段方程为

式中,xj,s<X <xj,e,yj,s<Y <yj,e。
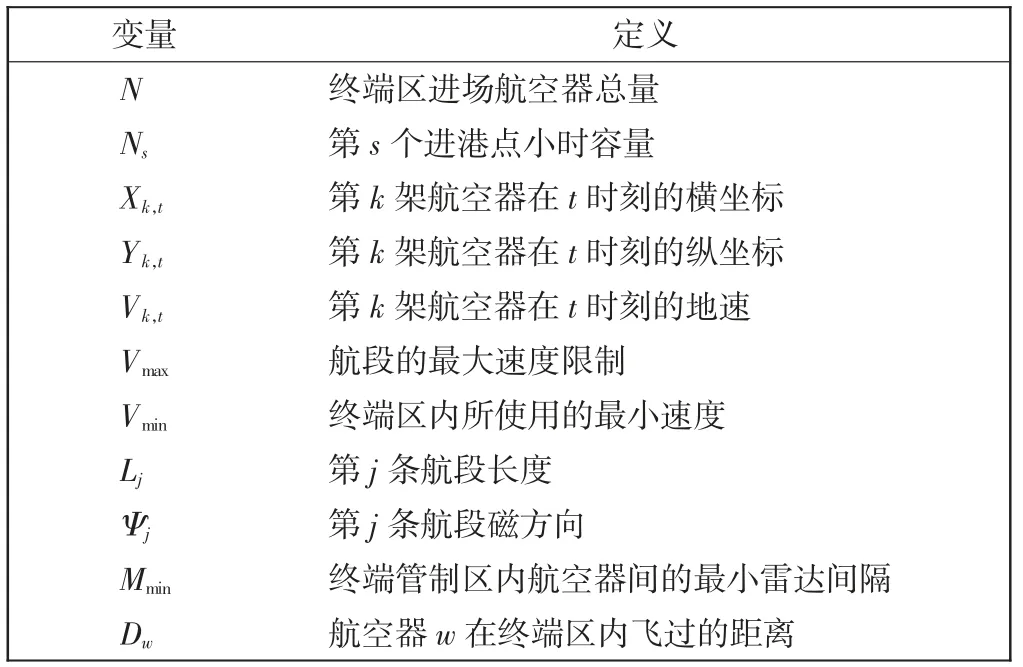
表1 变量描述Tab.1 Description of variables
为了修正空中风、高度差异等因素引起的航空器地速的变化,又满足航空器正常运行,将在航段最大速度和航空器进近速度(即在终端区内所使用的最小速度Vmin)之间生成随机数,代表航空器k 飞行的地速Vk,即Vmin<Vk<Vmax。在航空器实际飞行过程中,管制员会调整航空器速度,使航空器之间不存在明显追赶,因此,要控制生成随机数的区间大小。
航空器k 沿进场程序飞行,求解该航空器下一时刻位置为
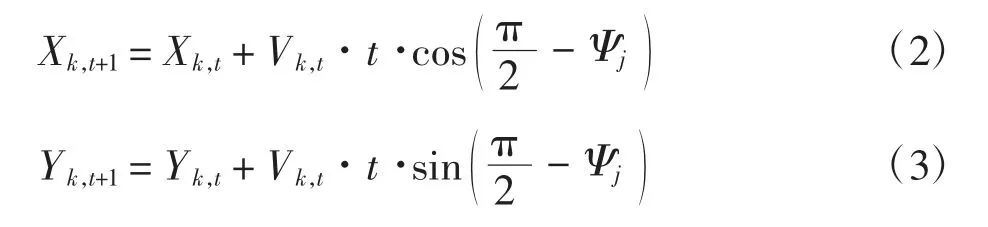
判断是否过点,转到下一航段运行。若航空器上一时刻的横、纵坐标满足该航段j 起点和终点横、纵坐标限制,而下一时刻不满足,则认为航空器过点,即

2.2 飞行程序交叉点处理
对于飞行程序中的交叉点,首先判断是否为同一条程序交叉点,若为同一程序交叉点,则判断变量P=0,如图2所示。若为两条及以上不同程序交叉点,则P=1,如图3所示。
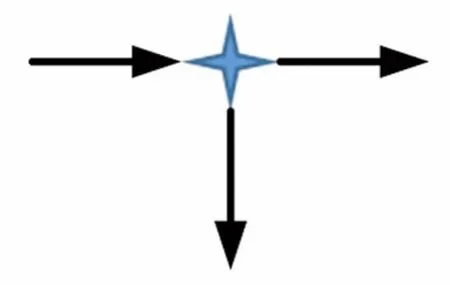
图2 同一程序交叉点Fig.2 Intersection of same procedure
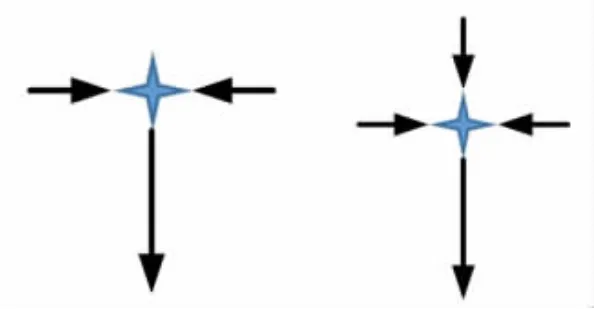
图3 不同程序交叉点Fig.3 Intersections of different procedures
当P=1 时,则需要判断航空器k 与其他路径上的航空器w 是否存在冲突。若存在冲突,则不同路径的航空器水平间隔不满足最小间隔标准,即

按照先到先服务的原则,如果该进场航空器k 比航空器w 先到交叉点且与航空器w 发生冲突,则将航空器w 调整到同一进港点的其他程序上。
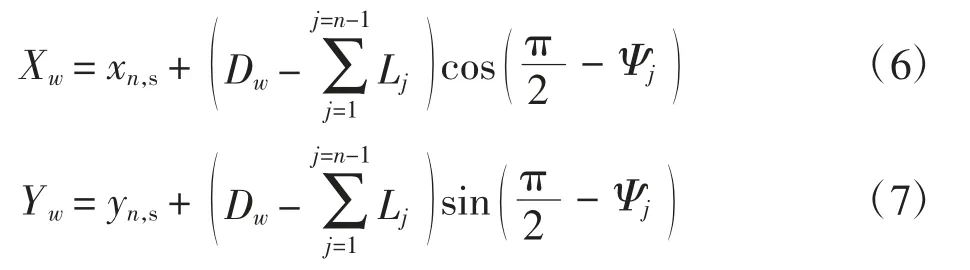
利用航空器w 已飞过的距离Dw,确定航空器w 转换程序后转换到哪一航段上,方法如下。
1)航空器w 的位置不在航路点上,介于两航路点之间,即

则航空器w 在第n 个航段上,航空器的横纵坐标为
2)航空器w 的位置正好在航路点上,即

此时航空器w 恰好在第n 个航段的终点上,航空器的坐标为终点坐标,即

在调整航空器路径时,按照先到先服务的原则,首先调配后到交叉点航空器的程序,当航空器有两条以上进场程序时,按照程序路径的长短,优先选择路径短的程序。其次,如果被调整航空器已没有路径可调配时,为了使系统容量增加,则选择调整先到交叉点航空器的程序,调整方法同上。如果先到交叉点的航空器也无路径可调配时,则后到交叉点的航空器实施等待,该进港点的容量减1。
航空器完成五边排序后,则视为整个进近指挥完成,此时航空器进场的进港点容量加1。统计每个进港点在时间段T 内完成进场的航班量Ns,最终可得出该时段内完成的终端区进场航空器总量N。
3 仿真分析
3.1 运行环境设定
重庆江北国际机场(简称江北机场)是重庆进近范围内的主要机场,其旅客吞吐量位列国内前十,且航班量逐年增加,致使重庆进近空域内航空器冲突增加。因此,以重庆进近空域为例,对江北机场向北运行时进场航空器的航迹进行仿真规划分析。
首先,应用Matlab 软件构建进场程序图。江北机场向北运行时共有QJG、SAKPU 和TOROD 3 个进港点,进场程序及程序点如表2所示,其中,SAKPU 进港点距离其他程序点位置较远,考虑到从SAKPU 进港的所有程序均先经过ISLIR 点,则将ISLIR 作为SAKPU进场航空器的程序起始点。

表2 进场程序及程序点Tab.2 Arrival procedures and procedure points
根据重庆终端区进场程序的分布特点,选取綦江QJG 为模型的坐标原点,根据航段长度和航段磁航向计算出所有程序点的坐标,如表3所示,构建重庆终端区进场程序,设置航空器运行路线如图4所示。
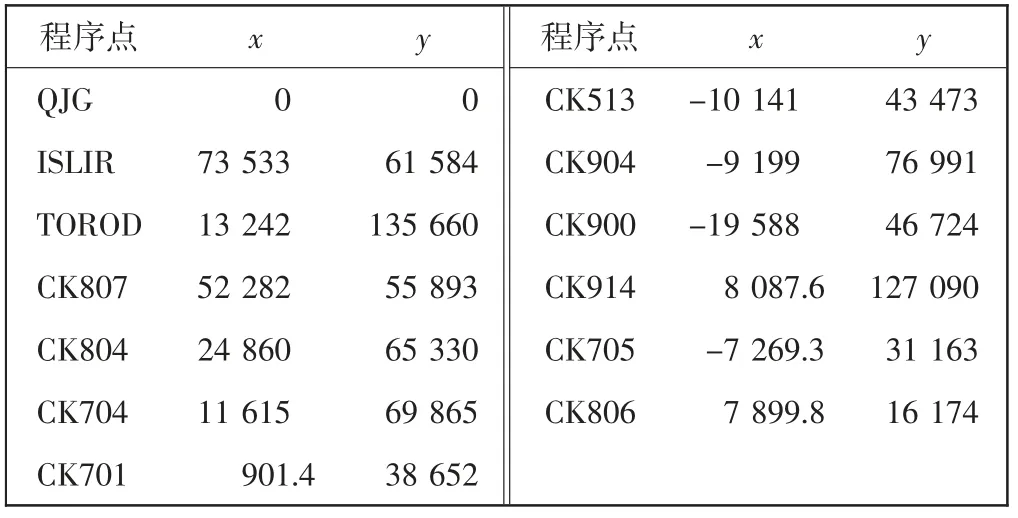
表3 程序点坐标Tab.3 Coordinates of procedure pointsm

图4 江北机场向北运行进场程序示意图Fig.4 Northbound arrival procedure chart of Chongqing Jiangbei International Airport
其次,按照重庆区域与重庆进近移交协议,在每个进港点生成符合协议要求的航空器,进场航空器按照系统初始选定的进场程序运行。
为了达到模拟进场航空器实际运行效果,模型需要给定不同航空器不同的速度。经过调研,QJG、SAKPU、TOROD 3 个进港点最大速度限制均为250 kt(1 kt =1.852 km/h),重庆进近范围内航空器实际运行的平均速度一般介于210~250 kt。模型以中位数230 kt 按正态分布来生成航空器的速度。仿真运行中航空器出现冲突时,按照前文方法由系统进行进场程序的选择与调整。最后,由系统给出每架航空器的进场路径。
3.2 仿真结果分析
按照重庆进近实际的移交协议、航空器速度等因素进行仿真,统计了100 h 中3 个进港点进场航空器的数量,然后用均值法得到1 h 内进场航空器数量的最大值为22 架。
以CK513 程序交叉点为例,对冲突的航空器进行统计,如图5所示,得到第一次调整的航空器数量。

图5 CK513 交叉点飞行冲突统计图Fig.5 Flight conflict statistics chart at point CK513
图5中为需要调整程序的冲突航空器数量,其中,SQ 表示SAKPU 进场航空器与QJG 进场航空器有冲突,且SAKPU 进场航空器先到起始进近定位点(IAF),此时需要调整QJG 进港航空器的航迹,其他情况与此类似。
在对有冲突的航空器完成所有航迹调整后,得到每架航空器的进场程序,如表4所示,其中,程序为等待的航空器表示进场时需要按进港点附近的等待程序进行等待,实际运行中按照先到先服务原则,可为其分配同一进港点下一航班进场程序进场。最终可得到QJG、SAKPU、TOROD 3 个进港点无冲突的小时最大流量,分别为15、12、13。

表4 航空器进场程序分配表Tab.4 Aircraft arrival procedure allocation table
为与仿真结果进行对比,统计了QJG、SAKPU、TOROD 3 个进港点2018年3月20日—26日一周中每小时进场航空器的数量。计算一周中同一时段航空器数量的平均值,得出一天中进场航空器数量峰值,如图6所示。

图6 各进港点实际小时高峰流量图Fig.6 Actual hourly peak flow chart for each arrival point
从图6可看出,QJG 小时高峰进场航空器架次为11 架,SAKPU 为7 架,TOROD 为10 架。
通过对比可看出,通过优化选择分配进场航空器进场程序,模拟得出的3 个进港点小时进场航空器数量均大于每个进港点实际小时进港最大流量,3 个进港点进场航空器运行效率分别提升了36.3%、71.4%、30%,提升了终端区内进场航空器数量,减少进场航空器飞行冲突。
4 结语
终端区内进场航空器航迹规划是一个复杂问题。针对进场航空器进场程序选择问题进行建模分析,可为管制员提供更加合理的决策方案,在工作中参考模型所给出的结果可减轻决策压力,减少指挥过程中对飞行冲突解决的额外干预。同时,通过对仿真结果与机场实际运行数据对比,模型通过对进场航空器进场程序进行优化,在减少飞行冲突的基础上增加进场航空器数量,对解决终端区内空中交通拥堵问题有一定现实意义。