无人机地面撞击风险评估体系构建及趋势展望
2021-04-06赵嶷飞
韩 鹏,赵嶷飞,刘 宏
(中国民航大学空中交通管理学院,天津 300300)
近年来,随着无人机在农林植保、搜寻救援、环境监测和物流配送等多个领域的成功应用,中国无人机保有量和飞行小时数增势迅猛。截至2018年底,民航全行业无人机有效驾驶员执照达44 573 本,无人机达28.7 万架,无人机经营性飞行活动达37 万小时[1]。据美国国家航空航天局(NASA,National Aeronautics and Space Administration)和美国联邦航空管理局(FAA,Federal Aviation Administration)联合成立的无人机研究团队预估,无人机数量将持续大幅增加,并有可能在2035年超过有人驾驶航空器。但与此同时,无人机运行风险事件也时有发生,无人机系统失效对地面人员和财物造成了严重损失,危害国家安全和普通民众生命财产安全。在迎来无人机数量爆发性增长之前,开展无人机运行风险研究工作具有前瞻性意义。
1 无人机地面撞击风险及事故诱因
无人机数量和应用的迅猛增加导致干扰航班和坠毁伤人等诸多问题的发生。近年来国内外已发生多起无人机地面撞击事故,造成重大的人员伤亡和经济损失。
2017年,无人机规章制定联合体(JARUS,Joint Authorities for Rulemaking of Unmanned Systems)针对无人机运行场景发布了特许运行风险评估指导材料(SORA,specific operations risk assessment)并给出了无人机运行风险评估的研究要素。如图1所示,SORA 将无人机运行安全风险分为3 类:对空中第三方的伤害、对地面第三方的伤害、对地面关键基础设施的破坏,明确将后两者定义为无人机运行的主要风险,并提出无人机地面撞击风险评估的主要指标。

图1 无人机地面撞击风险评估要素Fig.1 Key points of UAV ground impact accident research
中国民用航空局2019年无人机云数据统计显示,中国无人机主要在1 000 m 以下的低空空域运行,3.4%的无人机在120~1 000 m 空域内运行,96.5%在120 m以下空域运行。由于航线中载人飞机的运行高度通常在3000 m 以上,在低空空域内,无人机坠落对地面撞击点附近人员安全造成威胁的事故已成为低空空域无人机运行的首要风险。
同时,对无人机安全事故的统计[2]也印证了上述结论。机上无人的特性决定着无人机运行的安全风险已由对机上人员安全的影响转移到对地面人员和财物的安全威胁。
因此,近年来学界研究方向聚焦于无人机地面撞击风险评估[3-5],包括无人机地面撞击概率和地面危害程度的评估。就地面撞击概率而言,无人机对某一区域地面造成的影响主要有两方面:①无人机之间、无人机与有人机、无人机与障碍物之间发生碰撞后,无人机或其碎片坠落到地面,对地面造成危害;②无人机系统发生故障,直接坠落。如图2所示,无人机在某区域内的地面撞击事故发生概率为各因素之和。

图2 无人机地面撞击事故诱因Fig.2 Inducements of UAV ground impact accident
当前无人机运行密度较低,且多数国家对无人机进入有人机的空域采取严格管控,一般采用无人机在隔离空域独立运行的模式。因此,发生无人机与有人机或其他无人机相撞的事故较少,极少出现由无人机空中相撞导致的对地面安全的威胁,无人机系统故障成为无人机地面危害的首要诱因。无人机发生地面撞击事故的概率在大部分情况可以用无人机故障导致失控坠落的概率估算。因此,计算事故概率的首要工作就是建立无人机系统故障模型,确定无人机系统常见的高风险失效模式。
就危害程度而言,无人机对人体的伤害主要有两类:①因无人机动能造成的撞击伤害;②因无人机旋翼造成的割裂伤害。伤害类型与无人机和人体相撞的位置和姿态有关。目前交通事故中普遍以每小时伤亡人数作为评价指标。据统计[5],目前汽车运输风险(包括驾驶员)概率为1.5×10-7人/h,航空运输风险概率为1×10-6人/h,各研究机构普遍将1×10-8人/h 作为无人机运行的可接受风险程度。
为便于梳理,在国内外学者相关研究基础上,对无人机地面撞击风险相关术语进行归纳和解释,如表1所示。

表1 无人机地面撞击风险相关术语Tab.1 Terms related to UAV Ground impact risk
2 地面撞击风险评估模型
根据上述无人机地面撞击事故的研究要点和分析流程,以地面撞击事故造成的人员伤亡为核心,建立无人机系统失效模型、撞击区域预测模型、地面人口分布模型和危害评估模型。
2.1 无人机系统失效模型
建立无人机系统失效模型的目标是描述无人机系统在特定系统配置、运行环境条件和任务剖面下出现故障的不确定性。如图3所示,模型输入为一系列可能出现的失效形式(如推力损失、动力损失、人因差错、鸟击事件等)、失效原因(如环境和任务因素)、失效持续性(如突发故障或持续失效等),模型输出为不同失效模式的风险概率及对人员和财产的伤害程度。
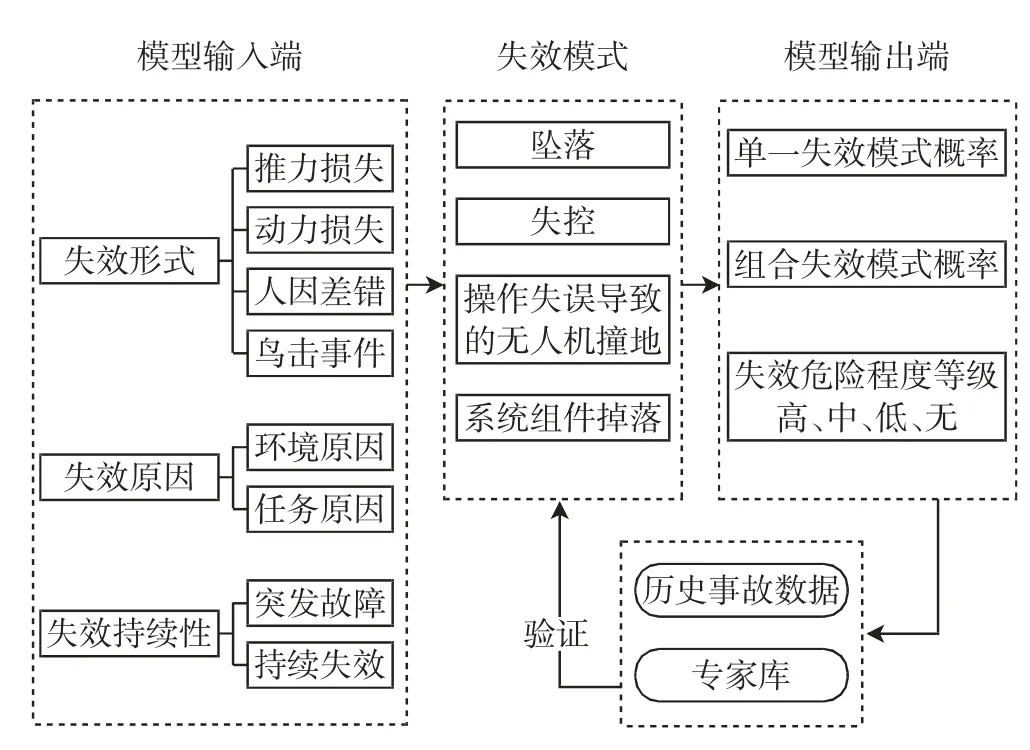
图3 无人机系统失效模型Fig.3 Failure model of UAV system
无人机系统常见高风险失效模式有以下4 类:
1)坠落,无人机系统失去维持安全高度或保持与人员及物体安全距离的能力;
2)失控,无人机系统故障导致无人机与地面人员及物体高速相撞的可能性;
3)操作失误导致的无人机撞地,可靠的无人机系统由于驾驶员失误出现的撞地情景;
4)系统组件掉落,无人机组件或吊挂货物掉落。
无人机系统失效模型可看作无人机系统整体或各子系统及相关组件的可靠性模型。无人机系统应用时间较短,历史事故数据掌握程度较低,故采用建模方法模拟无人机系统失效概率,建模方法包括可靠性框图法(RBD,reliability block diagram)、故障树分析(FTA,fault tree analysis)、事件树分析和失效模式(ETAFM,event tree analysis and failure mode)、影响度分析(EA,effects analysis)、贝叶斯网络(BBN,Bayesian belief networks)等。现有文献中具有代表性的无人机系统失效模型如表2所示,多为针对单一故障模式,缺乏对多种故障模式组合工况的研究,建模依据较多采用常规载人飞机的历史数据,较少根据无人机系统可靠性模型估算故障概率。

表2 无人机系统失效代表性模型Tab.2 Typical UAV system failure model
2.2 撞击区域预测模型
无人机系统失效后,其撞击区域不能简单当作质点来处理,需根据飞行轨迹及失效模式来确定。撞击区域预测模型描述了时间域与空间域内失效事件发生的不确定性。简言之,即无人机故障后受撞击区域的概率分布。撞击区域预测模型通过无人机系统特性(如最大滑翔距离等)确定无人机失效的最大撞击区域,并给出该区域边界内产生撞击的时空域概率。
具体考虑因素如下:
1)故障发生时的初始条件,如位置、速度及姿态等;
2)无人机系统失效模式,如无人机失效、失控、人为操作失误等;
3)无人机类型,如固定翼、多旋翼等;
4)无人机操纵方式,如远程操作、预设飞行计划等;
5)有无应急设备,如降落伞、自毁装置等;
6)环境因素,如气象风、地形等。
现有文献对撞击区域预测模型的建模方法包括:①数值预测算法,依据空气动力学模型和几何模型建立无人机平面运动、滑翔运动及垂直运动模型,利用概率分布函数计算无人机失效后的撞击区域范围;②经验估算法,依据无人机的重量、尺寸及类别,参考载人飞机或无人机历史失事数据,估算无人机失效后的撞击区域。撞击区域预测模型具体假设和内容如表3所示。
分析表3可知,撞击区域与其类型及失效后的航迹有关。建模假设中应考虑无人机失效后的坠落航迹是垂直坠落还是存在水平运动。

表3 撞击区域预测代表性模型Tab.3 Typical forecast model for the impact area
2.3 地面人口分布模型
地面人口分布模型描述了地面人员在特定位置和时间分布的可能性。在航空风险管理中,应首先关注人员的伤害,航空器系统和地面财物的损坏放在次要位置。
地面对象可分为以下几类:
1)甲方,与无人机操纵直接相关的人员与财物,如驾驶员、观察员、运行保障设备等;
2)乙方,与无人机操纵无关,但可从无人机系统运行中受益的人员与财物,如无人机作业任务受益方、无人机检修设施等;
3)第三方,与无人机操纵无关、亦非无人机运行中受益方的人员和财物。无人机管理规则应将重点放在第三方的风险控制。
以第三方为重点的地面人口分布模型可分为统一模型(uniform exposure models)和全面模型(comprehensive exposure model)两类。统一模型忽略由时空条件引起的人口密度变化,将人口平均分布在总体区域中。全面模型则采用聚类分析等方法,解释人口分布的时空变化,考虑地理位置特点(如体育场、学校或游乐场等)及时域性特点(如季节性、昼夜性等),对地面人口分布特性建模。模型的准确性通常由人口普查数据、卫星图像显示的地理数据和专家库数据进行验证。各类人口分布模型如表4所示。

表4 地面人口分布代表性模型Tab.4 Typical ground object distribution model
2.4 危害评估模型
危害评估模型描述无人机在特定时间和地点对特定人员伤害或财物损坏的概率。模型主要考虑两种危险状况:①无人机与其他航空器在空中或地面的碰撞或接近碰撞;②无人机及其组件对地面人员或建筑物的影响。该模型将受损物体类别及受损类型作为风险评估依据,如评估无人机系统对人体的伤害时,需考虑无人机动能、动量或能量密度,如图4所示。

图4 地面冲击危害评估模型Fig.4 Ground impact injury evaluation model
影响危害评估模型的因素包括以下几点:
1)伤害类型及伤害程度,伤害类型与无人机的类型有关,伤害程度与伤害方式有关,对人体的伤害方式包括钝力、渗透、爆炸、烧伤、撕裂等,如多旋翼无人机会对人体产生割裂伤害,固定翼无人机多产生钝力伤害;
2)受损物体类型,如人员、动物、车辆、建筑物等;
3)坠落位置及坠落时间,如燃油无人机重量会随着飞行时间减轻,冲击伤害也减轻;
4)无人机设计特性,如裸露的旋翼、易碎的部件等;
5)无人机性能及运行轨迹,如通过降落伞改变无人机故障后的坠落轨迹可有效降低其伤害程度;
6)二次伤害,如爆炸产生的碎片及冲击波等。
危害评估模型为无人机超视距飞行提供风险评估依据。通过对不同伤害机制的研究得出伤害阈值,为监管机构对无人机进行限制性飞行管理提供参考。国际现行的无人机管理规范大多依据重量对无人机进行分类管理,所建模型考虑不同重量无人机失效后动量差异引起不同程度的伤害,从理论上和技术上支撑了管理规范,也属于伤害模型对政策支撑的一部分。危害程度评估同时也为无人机设计提供了参考,如多旋翼无人机保护罩设计方案和增加降落缓冲装置等规范,都为减轻无人机伤害提供依据。
除上述文献外,还有部分研究成果考虑多种运行因素建立危害评估模型,如表5所示。
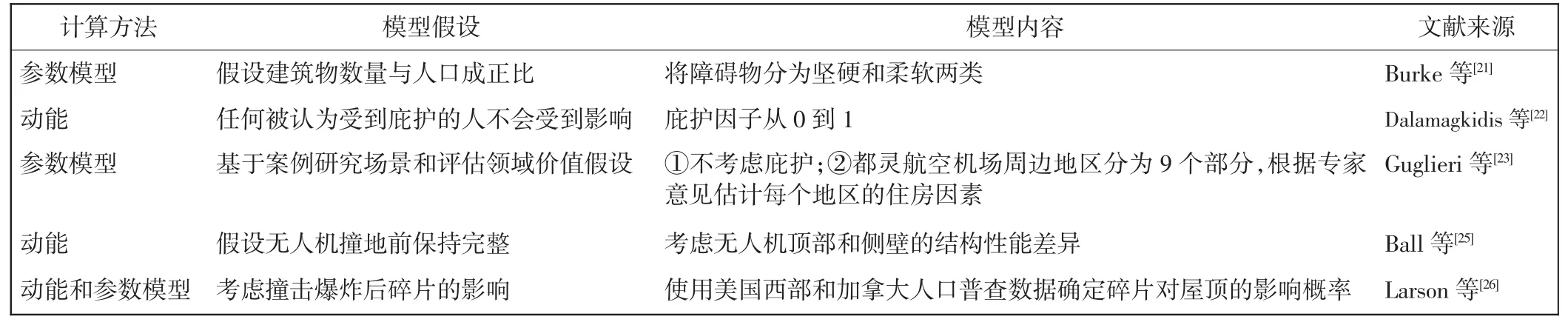
表5 危害评估代表性模型Tab.5 Typical ground impact injury evaluation model
现有危害评估普遍仅针对单一风险展开,重点包括:①估算无人机发生地面撞击事故的概率;②评估无人机及其组件坠落导致的地面危害程度。在此基础上,整合无人机系统失效模型、撞击区域预测模型、地面人口分布模型和危害评估模型,基于无人机坠落风险多要素考量,提出整体风险评估流程,如图5所示。
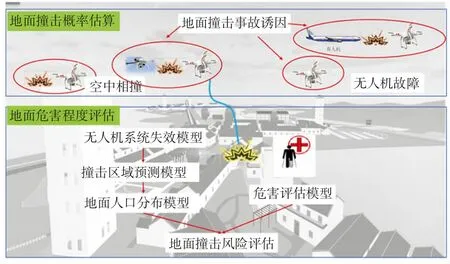
图5 地面撞击风险评估流程Fig.5 Risk assessment process of UAV ground impact accident
3 无人机运行风险研究趋势
3.1 无人机运行概念逐渐形成
现有文献较少考虑无人机系统运行流程,存在风险因素不全面的问题。基于无人机服役全流程的风险致因完善是风险评估的基础和关键,也是日后研究的趋势。
在无人机运行周期中,应以时间轴顺序,分别考虑飞行前、飞行中和飞行后的运行特点,建立从研发设计、生产制造、适航认证、运营作业、检修维护、人员培训到运营监管,覆盖各项配套服务的上下游产业全链条。从任务规划着手,考虑无人机航迹规划、飞行区域和时间、货物装载类型和方式等因素;考虑与飞行任务相关的飞行计划管理、飞行情报服务、运行空域规划、空中交通管制等;地面保障程序应考虑机场起降保障、无人机调度与周转,以及检修与维护等内容。建立无人机纵向全服役周期运行概念,如图6所示。

图6 无人机服役周期框架Fig.6 Operational conceptual framework for UAV in a full service cycle
3.2 风险评估理论体系不断完善
以无人机服役周期和运行概念为基础,围绕无人机系统、无人机运行空域和运行环境,完善无人机地面撞击风险评估理论,评估各运营场景安全风险,形成无人机地面撞击风险评估理论与方法。以无人机地面撞击概率和危害程度为评估目标,通过历史事故数据验证地面撞击风险评估理论的可靠性。
无人机地面撞击风险评估体系如图7所示。该体系充分考虑无人机系统空中运行风险和地面运行风险,将无人机运行相关的通信、导航和监视设备,以及地面控制站等纳入评价体系,融合风险识别、风险分析、风险评估、风险预警和风险处置等子系统。

图7 无人机地面撞击风险评估体系Fig.7 Ground impact risk assessment system of UAV
除在运行层面提供风险缓解方案外,风险评估理论已应用在无人机系统设计层面。大疆无人机设计时充分考虑了安全风险;谷歌也按照风险评估理论设计了物流无人机,考虑因素包括自动化地面保护路径规划、电池系统多重备份、机载设备失效监视和应急管理等。
3.3 产业及监管技术趋于成熟
无人机地面撞击风险评估体系为以下3 项工作提供支撑:①为无人机制造商提供基于风险和性能的无人机设计改进建议;②为无人机运行管理方提供缓解无人机运行风险的措施;③为无人机监管机构提供可信的法规制定依据。
作为无人机地面撞击风险评估体系的子模型,无人机系统失效模型在探究无人机失效模式和分析系统故障形式中起到关键作用。无人机制造商根据系统故障形式重点关注易引发故障的模块或零部件,通过异常状态动态监测等手段保证无人机性能和可靠性在可接受水平。
从无人机运行管理的角度,目前以美国FAA 发布的UAM(urban air mobility)规划和中国民用航空局发布的民用无人驾驶航空器综合管理平台(UOM,UAS operation management system)为代表。其核心是调配无人机运行冲突,缓解无人机运行风险。无人机地面撞击风险评估体系为后者提供理论依据,并已应用于UOM 前期工作,其重要组成部分——无人驾驶航空器空管信息服务系统(UTMISS,unmanned aircraft traffic management information service system)已于2018年在深圳地区启动运行管理试点工作。经中国民用航空局认可的无人机云系统已达11 家,以运行数据为中心的无人机监管体系逐步成形,覆盖全国各地区。
从监管政策和法规制定角度,纵观各国规章,其要义是通过评估无人机运行风险,降低无人机地面撞击概率,减轻地面撞击危害,保证无人机运行安全。降低地面撞击概率的途径通常是限制无人机的运行区域,使无人机避开人群飞行;减轻地面撞击危害的途径是控制无人机的运行参数(如质量、速度和高度),降低飞越人群的动能和势能。这些问题实质上可归结为对无人机地面撞击风险评估的研究,尤其是对无人机失效后撞击区域预测和危害评估[27]。欧洲航空安全局依据运行风险颁布了无人机运营规章框架,美国运输部(U.S.DOT)于2019年1月根据FAA 建议启动了一项草案(NPRM)以修订小型无人机运行规章,在地面人员风险可接受程度内,允许小型无人机系统飞越人群上空。中国民用航空局根据小型无人机运行风险发布了特定类无人机试运行管理规程(暂行)。
4 结语
在无人机应用蓬勃发展的大背景下,无人机运行概念正在形成,风险评估理论体系不断完善,产业和监管技术也趋于成熟。然而,现有无人机地面危害研究存在失效模式和风险因素单一、人口分布和致伤模型不统一、缺少风险评估体系顶层设计等问题。考虑无人机设计生产服役全流程及地面危害发生机理,多要素、全流程、一体化是今后无人机监管研究的趋势和重点。