用于集装箱病媒生物的探寻抓取机器人设计
2021-04-04滕新栋陈晓光王林涛孙高峰
滕新栋 ,张 涛 ,陈晓光 ,王林涛 ,孙高峰
(1.青岛海关,青岛 266071;2.黄岛海关,青岛 266071;3.大连理工大学,大连 116000)
0 引言
病媒生物指能直接或间接传播疾病,危害、威胁人类健康的生物。近年来,随着国际贸易的发展,集装箱作为一种运输工具被广泛用于各类货物的运输,每天国内各口岸都有大量集装箱入境,然而其中有很多集装箱中带有病媒生物,根据口岸卫生处理要求,这些集装箱需要进行卫生处理后才可放行[1,2]。
集装箱如要判断有无病媒生物,需要将货物搬出和人员进入集装箱检查,工作量繁重,耗费大量人力、物力、财力和时间,并且人员进入密闭的集装箱具有一定的危险性,降低了企业通关的效率,增加企业的经营成本,不利于加快口岸的通关速度。在发现病媒生物存在的痕迹时,需要对集装箱进行熏蒸,对集装箱的熏蒸效果评价也比较困难。
该研究研发了一种探寻抓取机器人,可在集装箱内部将死亡的病媒生物探寻抓取出来:如未发现活的病媒生物,则无需进行集装箱熏蒸;如发现活的病媒生物,则需要进行集装箱熏蒸,在熏蒸完成后,该机器人可在集装箱内部探寻是否还存活病媒生物,从而有效判断对集装箱的熏蒸效果。该研究从实用性角度出发,介绍了一种用于集装箱病媒生物的探寻抓取机器人系统设计。
1 探寻抓取机器人系统组成结构
探寻抓取机器人系统由探寻抓取机器人、探寻抓取机器人远程控制平台组成。探寻抓取机器人和探寻抓取机器人远程控制平台由无线方式进行通信(如图1所示)。
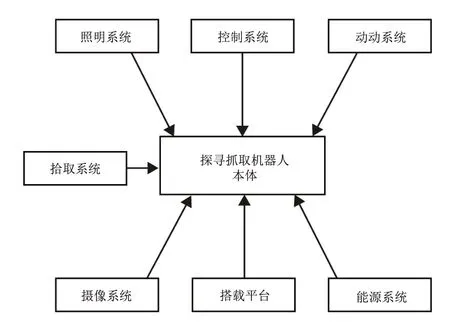
图1 探寻抓取机器人设计图
1.1 探寻抓取机器人
探寻抓取机器人是探寻抓取机器人系统的主体部分,主要包括抓取机构、视觉检测装置和底盘;机器人长150mm,宽100mm,高75mm(木质托盘上下木板之间的间距一般高100mm,机器人可有效的在木质托盘间运动)(如图2所示)。
抓取机构包括抓手、拉臂、配重盒、抓手底座、升降臂、升降装置底座和升降电机,抓手底座上安装有两个抓手,抓手底座上还固定安装有配重盒,抓手连接有拉臂,拉臂远离抓手的一端固定连接有抓手电机的抓取机构包括抓手、拉臂、配重盒、抓手底座、升降臂、升降装置底座和升降电机,抓手底座上安装有两个抓手,抓手底座上还固定安装有配重盒,抓手连接有拉臂,拉臂远离抓手的一端固定连接有抓手电机的输出轴;抓手底座铰接有升降臂,升降臂远离抓手底座的一端与升降电机铰接,升降电机固定安装在升降装置底座上,升降电机启动能够带动抓手底座和升降臂上下移动,且抓手电机能够带动抓手实现对死亡隐匿病媒生物的抓取,升降装置底座通过螺栓固定连接有底盘[3,4]。
视觉检测装置上安装有探照灯和监控相机,探照灯和监控相机与视觉检测装置的连接方式为卡接[5]。从监视器引出电源线和视频信号线,与视频WiFi模块连接;视频WiFi模块通电,与本地WiFi信号建立连接;电脑(手机、平板)与本地WiFi建立连接,打开软件,搜索目标设备,接收目标设备信号;电脑(手机、平板)上观看实时传输画面(根据网络状况,会有一定延时)。监视器通过图像接收天线,利用EM78P153K单片机接收视频信号和TW8831单片机解析视频信号,显示机器人摄像头所摄图像。
底盘安装有抓取机构,底盘上方设置有视觉检测装置,底盘底部安装有多个滚轮。底盘上还安装有前盖板、上盖板和驱动电机,上盖板通过定位螺丝与底盘连接,底盘上设置有电池仓,电池仓和上盖板之间通过定位螺丝固定连接,电池仓上安装有充电口;驱动电机与底盘通过卡箍固定连接[6];底盘的侧壁安装有用于散热的扇热装置。底盘的底表面开设有卡槽,卡槽内安装有红外相机,底盘上还安装有电子调速器,电子调速器的右侧安装有无线图传,电子调速器和无线图传与底盘的连接方式均为卡接,无线图传上安装有摄像头图像传输发射天线,无线图传和摄像头图像传输发射天线的连接方式为螺纹连接;上盖板的上表面安装有遥控信号接收机,遥控信号接收机通过胶连接固定于上盖板上,遥控信号接收机通过接收和发射天线无线连接有遥控手柄,接收和发射天线与遥控信号接收机为焊接,遥控信号接收机的左侧设置有摄像云台旋转电机,摄像云台旋转电机和通过定位螺丝固定于上盖板上,摄像云台旋转电机与视觉检测装置通过螺栓固定连接。
1.2 探寻抓取机器人远程控制平台
探寻抓取机器人远程控制平台,包括遥控手柄、显示器、内存结构、单片机等。人通过显示器判断机器人所处的环境,并通过遥控手柄实现对机器人的前进后退、抓取等操作。遥控手柄设计有STM32F072单片机将指令通过接收和发送天线传送给遥控信号接收机,遥控信号接收机将信号分发给电子调速器,电子调速器中设计有Microchip PIC12F单片机,然后通过PWM给驱动电路信号进而控制驱动电机,促使驱动电机工作,打开电源开关,使探照灯与电池仓相连,引起探照灯发光,监控相机将录取的图像通过无线图传传输给遥控手柄,显示在遥控手柄的显示器上,遥控手柄上可插入内存卡来存储录取的图像[7]。
遥控器与机器人配对:打开发射机(遥控器)电源,点击设置图标,向下滑动屏幕浏览设置菜单,然后选择RX bind。将对码线连接到接收机上的BIND/VCC接口。打开接收机电源,接收机指示灯开始快速闪烁,表示接收机进入对码状态。当指示灯开始慢速闪烁时,表示接收机和发射机配对完成。然后将对码线从接收机上断开,并断开接收机电源。然后重新打开接收机电源。检查发射机、接收机、机器人是否正常工作。如有异常,重复以上步骤重新配对。
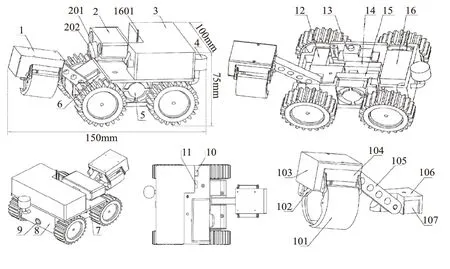
图2 探寻抓取机器人各个结构
2 功能与特点
2.1 前端高清摄像
为提高探寻抓取机器人的探寻识别能力,机器人前端装备有高清摄像头并配备探照灯,探照观察探照观察有效距离大约为2米,机器人携带电池的电量可维持机器人探寻识别和运动,前端高清摄像在机器人运动的过程中可有效了解集装箱内部的环境状况以及有无病媒生物的情况,满足机器人的探寻识别需求。
2.2 后端红外摄像
为减少电源损耗,不在探寻抓取机器人后端配备探照灯,而在探寻抓取机器人后端装备有红外摄像头,视野观察有效距离大约为1米,满足机器人在倒车过程中观察后部视野的需求。
2.3 抓取和避障功能
探寻抓取机器人前端装备有抓取机构,依靠升降臂和升降电机可上下运动,抓手可向内向外运动,在机器人到达死亡病媒生物面前时,通过调整抓取机构的上下位置和向内向外的宽度来满足抓取死亡病媒生物的需要,探寻抓取机器人的抓取机构可抓取不超过300克的死亡病媒生物,基本满足既定需求。抓取机构除了用来抓取死亡病媒生物外,在机器人前进或后退过程中遇到障碍,通过调整抓取机构的上下位置可增加机器人的越障能力和运行效率。
3 应用效果
集装箱内部的木质托盘与集装箱底部接触的部分厚度一般不超过3厘米,探寻抓取机器人能够快速在集装内部的木质托盘间运动,进出6米和12米长铺有木质托盘的集装箱只需要几分钟的时间,所携带的电池电量能够维持机器人的运动和探寻识别1小时,可快速探寻识别是否存活病媒生物(如图3和图4所示),从而有效判断对集装箱的熏蒸效果。在发现死亡的病媒生物时,可同病媒生物抓取出来(如图5所示),提高了在集装箱内部获得病媒生物的效率,从而避免了病媒生物污染集装箱。遥控器上的监视器可实时观察机器人实时采集到的视频图像,在遥控器上同时又设置有内存卡,可将拍摄到的视频图像储存起来。

图3 前置监控相机摄取图像
4 结语
该研究设计用于集装箱病媒生物的探寻抓取机器人实现了在集装箱内部将死亡的病媒生物探寻抓取出来的实际需要。在集装箱完成熏蒸后,该机器人可作为一种有效的工具在集装箱内部探寻是否还存活病媒生物,作为评判集装箱熏蒸效果的依据。
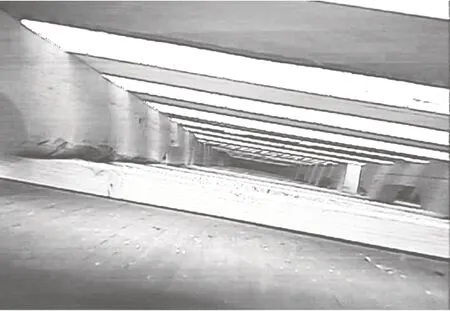
图4 后置红外相机摄取图像
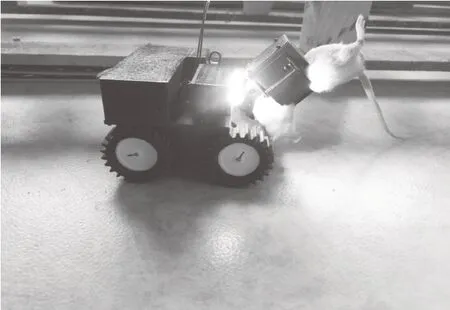
图5 探寻抓取机器人抓取图
