螺旋驱动式粮仓机器人行走机构设计与试验
2021-04-02靳航嘉吴文福吴子丹
靳航嘉,吴文福,2,吴子丹,韩 峰,董 平,徐 岩※
(1. 吉林大学生物与农业工程学院,长春 130022;2. 吉林工商学院粮食学院,长春 130022)
0 引言
粮食是民生之本,粮食生产关系到国家安全和社会稳定,粮食储藏是保证粮食安全的重要工序[1-2]。粮食入仓之后,存在较多凹凸不平的粮堆,需及时对粮面进行平整[3];储粮过程需要监测粮情信息以预防虫害和霉变,此外,粮面施药、粮面翻倒、粮面再平整等都需要一种方便快捷的方式来完成[4-5]。
目前,大部分粮面作业靠人工完成,存在成本高、费时费力、工作环境差等缺点[6];且由于人工作业的效率低,在集中入粮时,难以在短时间内完成所有入粮仓房的平仓作业,容易错过最佳粮情处理时机,导致粮食发热、生虫,增加熏蒸、通风等作业成本,影响作业效果,甚至影响储粮安全和粮食品质[7]。仓储粮食的虫霉防治遵循“局部有虫,局部处理”的原则,传统的局部杀虫处理方法操作不便、效率低,且对工作人员身体有损害[8]。国内外适于粮面作业的机械行走机构较少,现有的粮面作业机械多采用履带式行走机构,因存在结构复杂、质量大、体积大、易下陷、易倾覆、挤碾粮、转向不便、能耗高、控制水平不高等缺陷[9-10]。因此,亟需一种粮面行驶能力强的粮面作业机构来辅助人工或独立完成粮面平整、粮面施药和粮情探测等作业[11]。
仓储粮面属于松软地面,其承压能力和抗剪切强度低,导致行走机构严重下陷、打滑甚至无法行驶[12-13]。国内外学者在改变地面机械行走机构设计参数如加大轮胎尺寸、加大履带宽度、改变轮胎气压等研究方面取得了一定进展,结合仿生学理论研发的仿生步行轮、仿生步行轮式气垫车等在保证良好的牵引性能和提高行驶平顺性等方面取得了重要进展,但结构相对复杂,制造成本较高[14]。因此,提高机械在松软路面上的通行能力仍然具有重要研究意义[15]。
螺旋驱动方式最早被应用于水陆两栖车、沼泽地行驶车、雪地车等特种车辆,具有很强的地形适应能力,在水中、松软路面和坚硬路面都能行驶,在松软路面的行驶能力最强[16-18]。相比轮式和履带式驱动,螺旋驱动的车辆在湿地、沙地、沼泽等松软路面的性能十分优异[19]。螺旋驱动轮的设计参数对整车的行驶能力起到至关重要的作用。Cole[20]对螺旋升角分别为20°、30°和40°的3种螺旋驱动车在松散沙地上进行了行驶试验,结果表明,在相同条件下,螺旋升角为30°时,行驶能力最强且更节能。螺旋叶片高度太小车辆不能获得足够的牵引力,太大则会增加车辆前进阻力,需要更大的驱动力驱动车辆前进,针对不同螺旋叶片高度与浮筒直径的比值,Chryler在泥地上进行了比例分别为0.125、0.167和0.208的3组试验,得出的结论是:螺旋叶片高度越大,捕获的泥土越多,但前进的阻力也随之增加,0.125是较为理想的螺旋叶片高度与浮筒直径的比值[21]。此外,浮筒直径、浮筒长度、螺旋的数量、螺旋叶片厚度、车辆重心位置、2个浮筒中心距、浮筒两端的锥度和浮筒的形状(圆柱体或椭圆体)都影响车辆的行驶能力[22]。这些研究对螺旋驱动式粮仓粮面行走机构具有重要参考价值。
粮面同属于松软路面,所以利用螺旋驱动轮的优势特点或可克服现有粮面行驶机械易下陷、易倾覆、易打滑等行驶困难。因此,本文从结构设计和行驶控制方面对螺旋驱动机构进行研究,将螺旋驱动轮作为行驶机构,以提高粮仓作业机械在粮面上的通行能力及自动化作业能力。
1 粮面行走机构结构设计
1.1 整体结构
图1为螺旋驱动式粮面行走机构三维模型,2个具有一定中心距的旋向相反的螺旋浮筒作为驱动装置,与电机及传送动装置、机架和罩壳组成机构主体。主体前后可根据作业需求增加悬挂装置。
1.2 工作原理
螺旋驱动轮在粮面行进的过程可以看作是螺旋叶片对散粮的切割过程,驱动轮依靠粮面对螺旋叶片的作用获得推力,因两螺旋驱动轮的螺旋叶片旋向相反,当驱动轮转速大小和方向变化时,左右驱动轮的推力也随之变化,机构的行驶方向也随之改变。
平粮作业时,以机构主体作为粮面行驶平台,前端设置双向绞龙用于分散粮堆,快速降低粮堆高度;后端悬挂可调角度的刮粮板,根据粮面情况,调整刮粮板角度,达到最佳的平整效果。前后悬挂件均可拆卸,当机器人用于其他粮仓作业工作时,如粮面翻倒、粮面喷药、粮情探测等,只需更换悬挂部件。
2 关键参数设计
螺旋驱动轮是行走机构的核心部件,如图2所示,主要由圆柱体(也称为浮筒)及缠绕在圆柱体上的螺旋叶片组成,圆柱体为中空设计以便减轻质量并获得足够的“浮力”。螺旋叶片形状为阿基米德螺旋,具有一定高度,螺旋叶片可以设计为单头或多头。
2.1 浮筒直经与轴心距
在堆粮高度较高的情况下,行走机构利用仓门入仓作业难度较大,因此,从粮仓窗口进出较为合适。根据粮库仓房建设标准,窗口宽度为1.2 m,高度为0.9 m,为满足装仓机械从窗口伸入仓内进行补仓作业,因此,为方便顺利进出,机构尺寸不能超过窗口尺寸。
浮筒直径大小直接影响螺旋驱动轮与粮面的接触面积,较大的浮筒直径可以使机构获得较大的支撑力,是保证机构抗沉陷能力的关键。综合考虑,初步确定浮筒直径为300 mm,两浮筒轴心距为750 mm,机构主体宽度约1000 mm,高度约600 mm,可保证机构可顺利进出窗口,同时有较好的抗沉陷能力。
2.2 螺旋叶片高度与浮筒直径之比
机构在粮面行驶时,螺旋叶片对粮层有切割作用,螺旋叶片越高,所切割的粮层越厚,螺旋驱动轮所需扭矩越大。这里引入螺旋叶片高度与浮筒直径的比值α:
式中D为旋螺旋驱动轮浮筒直径,mm;h为螺旋叶片高度,mm。
根据文献[21],当α值接近0.125时,机构的行驶性能好于α值为0.167和0.208。考虑较高的螺旋叶片高度会降低其抗屈服能力,因此,本文取α=0.1,略小于0.125。将浮筒直径D=300 mm带入式(1),可得螺旋叶片高度为30 mm。
2.3 螺旋升角与螺距
螺旋叶片的螺距与螺旋升角的关系为
式中P为螺距,mm;r1为浮筒半径,mm;h为螺旋叶片的高度,mm;η为螺旋叶片升角,(°)。
根据Cole的研究[20],当螺旋升角为30°时,机构的行驶性能和节能效果均较好,由式(2)计算得出螺距为598.55 mm。
3 行驶性能评价
3.1 滑转率
滑转率是评价车辆在松软地面上行驶性能的重要指标,滑转率过大说明车辆行驶在此路面的通过性能不佳。 由于散粮颗粒群存在压实和下陷,螺旋驱动轮在行进过程中会出现滑转,滑转率为[23]
式中Sx为滑转率,%;v为行驶速度,mm/s。
由式(3)可得
由式(4)可知,当滑移率达到稳定时,行进速度v与转速ω成正比例关系,比例系数为P(1-Sx)/2π。
3.2 沉陷量
车辆在松软路面行驶的过程中,沉陷量也是车辆通行能力的重要指标,螺旋驱动轮的沉陷量越大,行驶阻力也将随之增加。在滑移率达到稳定的情况下,沉陷量也会达到稳定,且沉陷量与滑移率存在线性关系:
式中H为沉陷量,mm;c为斜率;h0为截距,mm。
3.3 偏航角
由于粮面的不平整,机构在行进过程中左右螺旋驱动轮与粮面的接触情况不一致,导致2个驱动轮在相等转速下获得的推进力不相等,致使行走机构偏离指定行驶方向,实际行驶方向与指定方向的夹角为偏航角,行走机构的实际行驶速度可分解为沿指定航向方向的纵向速度和垂直于航向方向的侧向速度两部分,则有
式中θ为偏航角度,(°);vy为行走机构行驶速度沿指定航向方向分解的纵向速度,m/s;vx为行驶速度垂直航向方向分解的侧向速度,m/s。
4 行驶方向分析
4.1 推进力分析
推力的大小与螺旋驱动轮的设计参数以及粮面本身的物理特性有关。散粮颗粒对叶片的作用力主要有促使行走机构移动的推力和与叶片运动方向相反的摩擦力。
此外,行走机构行驶过程中还将受到推粮阻力。推力方向沿叶片法向方向,可分解为沿螺旋驱动轮轴向方向的轴向力和水平方向垂直于轴向的侧向力。
取螺旋叶片上一微扇形,则其面积为
式中dA为微扇形面积,mm2;dθ为微扇形所对应的角度,(°)。
单个螺旋叶片所受总力F[24]为
式中τ为螺旋叶片对粮层的剪切力,N;σ为粮层对螺旋叶片的正压力,N;θ为单个螺旋叶片与粮层接触面的圆心角,(°)。
轴向力为
侧向力为
其中,以顺时针方向为正,则sgn(ω)的值为
式中ω为螺旋驱动轮转速,rad/s;Fy为粮层对螺旋驱动轮的轴向力,N;Fx为粮层对螺旋驱动轮的侧向力,N。
4.2 推进力与行驶方向的关系
2个旋向相反的左右螺旋驱动轮在不同的转速和转向组合下所受轴向力和侧向力的方向和大小也不同,螺旋驱动机构因而表现出不同的行驶方向。如图3所示,当2个驱动轮等速反向转动时,左轮所受的轴向力lyF和右轮所受的轴向力ryF方向大小和方向相同,左轮所受的侧向力Flx和右轮所受的轴向力Frx方向大小相等方向相反且作用在同一直线上,因而机构向前或向后行驶;当2个驱动轮等速同向转动时,左右轮的轴向力lyF和ryF大小相对方向相反且分别作用在左右轮轴线上,从而形成转矩使行走机构旋转运动;同理,当机构差速转向时,左右轮需有差速且转向相反,转弯半径与2个驱动轮转速差有关。
此外,螺旋驱动机构在不同硬度地面上的运动方式有所不同,在松软地面上(如沙土、散粮、雪地等),当2个驱动轮等速反向转动时,机构将前进或倒退,而同样条件下在坚硬的路面上行驶(如水泥路面),机构将无法前进或倒退;当2个驱动轮等速同向转动时,在松软地面上机构的运动表现为旋转运动,而在坚硬路面上为横向运动,原因在于螺旋叶片无法切割坚硬的路面,无法获得地面对螺旋叶片的推力,螺旋驱动轮仅获得与地面接触处的摩擦力。
5 行驶控制
5.1 控制系统设计
机构在粮面行走时,如何控制机构行驶方向及行驶速度十分关键,如图4为螺旋驱动式粮面行走机构控制系统示意图,控制系统主要由无线遥控、控制模块、电动机及驱动模块、左/右旋螺旋驱动轮、转速传感器和六轴加速度传感器组成。遥控左右螺旋驱动轮对称布置且配备独立电机,可单独驱动;控制模块集成了无线接收装置用于接收无线遥控发送的指令,转速传感器测量螺旋驱动轮实际转速并输出给控制模块,六轴加速度传感器用来测量行走机构行驶方向(航向),电机驱动模块使用L298N逻辑支持PWM调速及电机正反转。
5.2 控制原理
基于粮面行走机构行驶原理,设计了控制系统流程,如图5所示,行走机构接受指令并分析得到行驶方向和速度,控制模块计算并分配左/右旋螺旋驱动轮的目标转向和转速以及获取转速传感器值,控制模块经PID运算向电动机驱动器发送调控指令,电机驱动器使用PWM脉宽调速方式,调整占空比控制转速。
行走机构在粮面上行驶过程中,由于粮面的不平整,左右螺旋驱动轮与粮面的接触情况不同,造成左右轮的沉陷量和滑移率也不相同,在直线行驶时不仅会导致其实际行驶速度与设定行驶出现较大偏差,还会导致行驶方向偏离原来航向,因此需根据行走机构实际行驶速度和航向不断调整左右轮的转速和转向使其接近目标行驶速度和方向,控制系统主线程如图6所示。
由转速分配运算决定螺旋驱动轮的转向及高、低转速分配结果,转速分配流程图如图7所示。将目标转速lω和rω分别输入PID运算部,结合转速传感器测量的实际转速lω"和rω",分别计算左右驱动轮目标转速和实际转速的偏差,经过PID运算输出电机控制指令,不断调整驱动轮转速。
6 粮面行驶试验
6.1 试验样机
为测试螺旋驱动式行走机构在粮面上的行驶能力,按照约3∶1的比例制作一台小型试验样机进行粮面行驶试验,如图8所示。其螺旋驱动轮为中空设计,由3D打印完成,为保证行走机构的重心能够靠近其形心,将电机及其传动部件内置于螺旋浮筒中;浮筒前端设计为锥形结构以减小行驶阻力;后置刮粮板用来刮平粮面且可拆卸。
粮面行走机构主要参数如表1所示,由表中数据可知,螺旋叶片高度与浮筒直径的比值为0.1,螺旋升角为30°,浮筒直径与浮筒长度之比为0.280。为确保行进过程的平稳性,螺旋头数设计为4个。
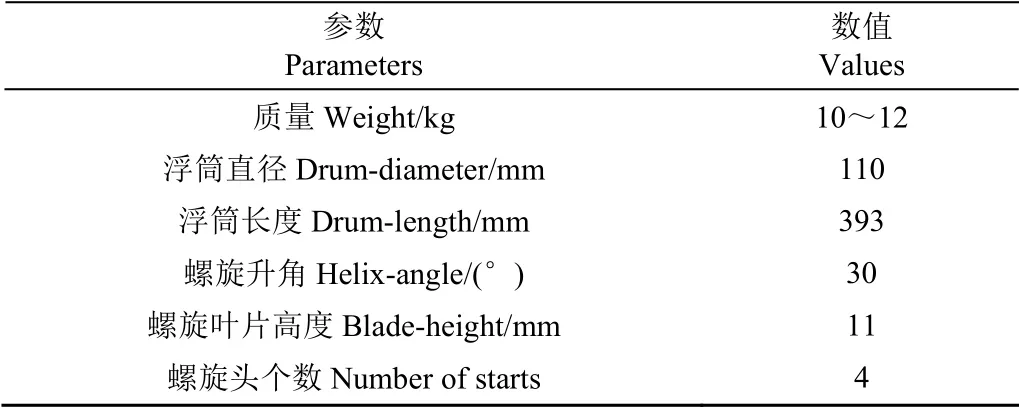
表1 粮面行走机构试验样机主要参数 Table 1 Main parameters of grain walking mechanism test prototype
试验材料:玉米。粮层厚度约600 mm,远大于螺旋驱动轮直径,玉米含水率约为14%。
为探究行走机构直线行驶速度和旋转行驶速度与驱动轮转速的关系,试验分别设置PWM调速占空比为40%、60%、80%和100%对驱动电机调速,对应驱动轮转速为0.33、1.06、1.72和1.92 r/s。在4种不同的螺旋驱动轮转速下对粮面行走机构进行直线行驶和旋转行驶试验。直线行驶试验时,使用秒表记录行驶时间,使用米尺测量行驶距离,计算出行驶速度;使用激光测距仪测量直线行驶沉陷量;旋转行驶试验时,记录机构旋转行驶2圈用间,计算出旋转行驶转速;为减小试验误差,每组试验重复3次,取平均值。
6.2 试验结果与分析
直线行驶和旋转转弯行驶试验如图9所示,直线行驶时螺旋驱动轮行驶之后在粮面上留下槽型轨迹,轨迹深度均匀,行进过程平稳。在旋转运动时,行走机构在粮面上留下圆形轨迹,由于试验样机重心与其形心不完全重合,导致旋转中心偏移而靠近后端,圆形轨迹半径约等于行走机构长度400 mm。
拟合出直线行驶速度与驱动转速的线性关系,如图10所示,4种转速下直线行驶速度分别为0.07、0.22、0.34和0.37 m/s,随着驱动轮转速的升高,行走机构直线行驶速度也随之升高,且成正比例关系,比例系数约为0.197,拟合决定系数为0.9995,两者线性相关性较高。
4种螺旋驱动轮转速下,行走机构旋转行驶速度分别为0.10、0.24、0.39和0.53 r/s,旋转行驶转速与驱动轮转速成比例关系,比例系数约为0.251,拟合决定系数为0.993,相关性较高,如图11所示。
有螺旋驱动轮转速和直线行驶速度可由式(3)计算出行驶滑转率,并对粮面行走机构在不同螺旋驱动轮转速下直线行驶沉陷量进行测量,结果如图12所示,随着驱动轮转速的增加,行驶速度增加的同时滑转率也随之增加,但4种转速下滑转率均不高,在驱动轮转速为1.92 r/s时,行驶速度为0.37 m/s,滑转率达到最大值为2.49%。沉陷量随着驱动轮转速的增加而逐渐减小,这是由于在这4种转速范围内,驱动轮转速大时行走机构行驶速度快,且滑移率比较小,螺旋叶片对同位置粮食颗粒作用时间短,而驱动轮转速较小时,螺旋叶片对同位置粮食颗粒作用时间长,在螺旋叶片作用下粮食可以移动的数量多,从而沉陷深度增加。最大沉陷量为70mm,为浮筒直径的63.64%。
受样机驱动电机输出能力限制,实际试验时,螺旋驱动轮的实际转速最大值为1.92 r/s,更高驱动轮转速下,行走机构行驶速度、滑转率、沉陷量的变化规律有待进一步研究。
7 结论
1)结合水陆两栖车辆的螺旋驱动方式,设计了可在松软粮面上行走的螺旋驱动式粮面行走机构,通过粮面行驶试验证明了该机构的粮面通行能力较好,可以实现前进、后退和自转转向,大幅提升了粮面行走机构的粮面行走性能。
2)对粮面对螺旋驱动轮作用的轴向力和侧向力进行了分析,确定了螺旋驱动轮与粮面行走机构行驶方向的关系,开发了粮面行走机构速度和航向动态调整控制系统。
3)对粮面行走机构在不同驱动轮转速下进行了直线行驶和旋转转向试验,拟合出直线行驶速度、旋转角速度与驱动轮转速的线性关系,结果表明,两者均与驱动转速成正比例关系比例系数分别为0.197和0.251。试验测得了行驶沉陷量与滑移率,结果显示,在一定范围内,随着驱动轮转速的增加滑转率逐渐增加而沉陷量逐渐减小,最大滑转率为2.49%,最大沉陷量为70 mm,约为浮筒直径的63.64%。