无人机RGB影像中人工林单木位置的提取
2021-03-31李晨李佳王明果段平王云川
李晨,李佳*,王明果,段平,王云川
(1.云南师范大学地理学部,昆明 650500;2.云南省地质科学研究所,昆明 650501;3.云南省地矿测绘院,昆明 650218)
人工林单木位置提取是指将人工林中每一棵树木都标记在地图上,便于林业管理者统计、查询以及后续应用。单木位置的准确提取有助于评估林区树木产量、监测林区树木数量变化等,同时,也是单木树冠提取、林区郁闭度计算、植被健康监测的前提条件[1-2]。
传统的单木位置信息获取方式是人工实地测量。该方式效率较低、成本较高,且提取精度难以满足要求[3]。随着无人机技术的不断发展,低成本、便捷地获取高空间分辨率、高时间分辨率的影像成为可能。目前大多数无人机通过搭载可见光相机获取研究区域的影像[4],采用影像信息提取的方式,可以从无人机RGB影像中获取单木位置[5]。研究方法可以分为2类。第1类方法是根据影像中树冠中心像素值最大的原理来获取树冠中心点,并将其表示为单木位置。这种单木位置表示方法与采用树干作为单木位置的原理相似[6],都是以一棵树的单体特征来表示单木位置。最常用的树冠中心点获取算法是局部极大值,通过设定一个移动的窗口,从影像中寻找最大像素值点作为单木位置[7-8]。第2类方法是根据树冠的像素值与其他地物像素值的差异,直接提取树冠轮廓,从而实现单木位置的提取,如谷地跟踪法[9]、模版匹配法[10]、多尺度分割法[11]等。但是,由于无人机RGB影像空间分辨率较高,存在树冠内部像素差异大、树冠与非树冠植被颜色相似、树冠粘连等问题,直接导致使用无人机RGB影像提取的人工林单木位置精度较低。
无人机RGB影像除了能生成数字正射影像(digital orthophoto map,DOM),还可生成数字高程模型(digital elevation model,DEM)和数字表面模型(digital surface model,DSM)。基于此,笔者以无人机RGB影像为基础数据源,首先构建其DOM、DEM、DSM;利用可见光波段差异植被指数(visible-band difference vegetation index,VDVI,公式中记为IVDV)对DOM进行植被与非植被的区分;结合DEM和DSM模型数据,构建冠层高度模型(canopy height model,CHM),应用CHM模型区分树冠与非树冠植被;为进一步提高精度,利用形态学图像细化算法去除树冠间的粘连;最后对人工林区单木位置进行提取。
1 研究区域与研究数据
1.1 研究区域
研究区位于云南省昆明理工大学呈贡校区内,如图1所示,研究区面积为11 064.32 m2,单木数量为912,林区类型为人工林。研究区内一部分树冠生长茂密,树冠之间有粘连,在后续单木位置提取过程中,既会造成单木位置漏提,也会造成错提;树冠下面有一些草地、灌木等非树冠植被,易误判为单木树冠。
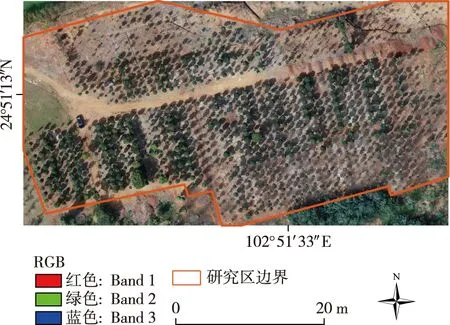
图1 研究区Fig.1 Study area
1.2 试验设备
1)采用大疆精灵4pro进行影像采集。无人机搭载的成像系统拥有2 000万像素的CMOS传感器和12档的动态范围,机械快门可以防止快速移动过程中的拖影;搭载了位置与姿态系统(position and orientation system,POS),可以实时获取数据传感器位置与姿态信息。航拍时间为2019年10月26日,航拍时天气晴朗,风力较小。航拍高度为60 m,航向重叠度为85%,旁向重叠度为75%,共获取影像81幅,影像分辨率为2.4 cm。
2)采用徕卡“GPS RTK”采集像控点坐标。本次试验一共布设了9个像控点,其中5个像控点用于提高无人机产品数据的空间参考精度,4个像控点用于无人机产品数据精度验证。
1.3 无人机影像处理及精度验证
利用无人机RGB影像提取人工林单木位置时,首先需要生成研究区的DOM、DEM和DSM。本研究统一采用WGS84_UTM_48N投影坐标系构建无人机产品数据,方法分为5个步骤。
1)对无人机RGB影像进行空中三角测量,将POS数据,即记载的无人机航摄瞬间影像的空间位置与姿态作为带权观测值引入空中三角测量的数学模型中,与5个地面像控点坐标,即摄影测量观测值进行联合区域网平差,以确定影像真实的空间位置与姿态,从而获取关键连接点的地面坐标,生成稀疏点云。
2)利用多视影像密集匹配技术,从多幅影像中识别出同名点,由此建立区域的密集点云。
3)将密集点云进行不规则三角网连接,生成DSM模型。
4)利用不规则三角网加密滤波算法对密集点云进行地面点与非地面点分离。首先构建一个规则格网,将密集点云划分为多个区域;然后基于每个区域内的最低点构建一个稀疏不规则三角网,设定一个角度阈值和距离阈值对剩余点进行迭代判别,将小于阈值的点划分为地面点,其余的点划分为非地面点;最后对地面点构建高程格网,生成DEM模型。
5)根据DEM模型,对无人机影像进行单幅影像正射纠正,然后经镶嵌、裁剪等处理得到整个区域的DOM[12]。
为检验无人机产品数据的精确度,以中误差作为评价标准[13],利用4个剩余的像控点坐标进行精度验证。以x、y表示平面误差,z表示高程误差,M表示整体误差,则本次试验获取的无人机产品数据精度较高,其中x方向的中误差为0.017 m,y方向的中误差为0.008 m,z方向的中误差为0.046 m,整体中误差为0.028 m,符合GB/T 23236—2009《数字航空摄影测量空中三角测量规范》中提出的1∶500比例尺平地的平面位置中误差不大于0.175 m、高程中误差不大于0.15 m的要求。
2 试验方法
以无人机DOM、DEM、DSM等产品数据作为人工林单木位置提取数据源,方法如下:首先利用VDVI将DOM分为植被与非植被;其次结合DEM和DSM构建研究区CHM,利用CHM对研究区人工林树冠进行提取;为进一步提高精度,利用形态学图像细化算法去除树冠之间的粘连;最后对人工林区单木位置进行提取。具体提取流程见图2。

图2 人工林单木位置提取流程Fig.2 Flow chart of individual tree position extraction in the artificial forest area
2.1 植被与非植被分离
无人机DOM只含有红、绿、蓝3个波段信息。由于绿光波段的反射较强,而红光和蓝光具有吸收特性,因此,VDVI基于这一特性能够对DOM区分植被与非植被,且阈值在0附近,较易确定[14]。计算公式如下:
(1)
式中,R、G、B分别代表影像中的红、绿、蓝波段值。
2.2 人工林树冠提取
利用VDVI从DOM中提取的植被信息既包含人工林树冠,也包含非树冠植被,如草地、灌木。人工林树冠与草地、灌木在高程上具有差异,从高程差异上可以对树冠与草地、灌木进行分离。利用无人机RGB影像可以获得研究区的DSM与DEM。DSM记录了地表各类物体的高程信息,DEM记录了地面的高程信息。
将DSM与DEM做差值计算可获得CHM,CHM可以很好地描述不同植被的高程差异[15]。通过统计CHM中一部分草地、灌木的像素值,将平均值作为阈值,去除小于等于阈值的像素,保留大于阈值的像素值作为树冠,从而实现树冠与非树冠的分离。
2.3 树冠粘连去除
人工林中的树木之间虽然具有一定的间距,但仍然有部分树冠之间存在粘连,在后续单木位置提取过程中,树冠粘连既会导致单木位置漏提,也会导致错提。因此,去除树冠粘连能够提高单木位置提取精度。形态学细化算法可用于去除树冠粘连,主要分为图像二值化和形态学图像细化2个过程。
2.3.1 图像二值化
图像二值化是形态学细化的前提条件,是指将图像中的目标与背景进行分离,分别用0和1表示背景和目标。在CHM中,树冠与非树冠具有较大的差异,Otsu算法常用于对目标和背景差异大的图像进行二值化[16]。采用Otsu算法对CHM进行二值化,计算方法为:
(2)
μΤ=ω1μ1+ω2μ2
(3)

2.3.2 形态学图像细化算法
形态学图像细化算法以形态学原理为基础,通过不断地删除粘连树冠的边界像素,直到粘连树冠分离,且分离得到的独立树冠主体结构变化不大,基本原理是构建8个结构元素对[17],如图3所示。图3中,“1”表示目标图像上的点,“0”表示背景图像上的点,“x”表示既可以是图像上的点,也可以是背景图像上的点,“o”表示参考中心点。
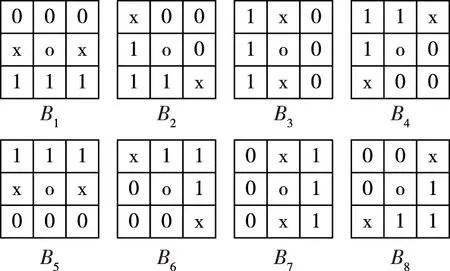
图3 8个方向的结构元素对Fig.3 Pairs of structural elements in eight directions
采用B1~B8对粘连树冠进行击中击不中变换[17],目的是分别选中图像中粘连树冠的北、东北、东、东南、南、西南、西、西北8个方向的像素,即选中粘连树冠的边界像素,然后删除。一直迭代此过程,直到粘连树冠分离。具体为:
f⊗B=f-(f*B)
(4)
{B}={B1,B2,B3,…,B8}
(5)
f⊗{B}=((…((f⊗B1)⊗B2)…)⊗B8)
(6)
式中:f表示包含粘连树冠的图像;B表示图3中的一个结构元素对;f⊗B表示采用B对f进行细化;f*B表示采用B对f进行击中击不中变换,即选中粘连树冠某个方向的像素,如采用B1选中了北面的像素。
式(6)表示一次细化过程:首先采用B1对f进行细化,删除了粘连树冠北面的像素;之后将得到的细化结果用B2继续细化,再将东北方向的像素删除,以此类推。当B8应用于上一次细化结果时,粘连树冠的边界像素被删除一次,通过对式(6)进行迭代,直到树冠粘连被去除。
2.4 单木位置提取
将去除非植被和去除粘连后的二值图像作为掩膜,提取VDVI中与“1”值相对应的区域,作为人工林单木位置提取的数据;利用ENVI crop science工具,通过设置最小作物直径、最大作物直径、增量数、高斯平滑因子、允许重叠度5个参数后可提取单木位置。这5个参数中,最小作物直径和最大作物直径可控制提取树冠的最小与最大直径;增量数是提取树冠直径的步长;高斯平滑因子用于抑制图像中的噪声,值域为0~1,图像中噪声越大,设定的值越接近1;允许重叠度根据树冠之间的粘连程度而定,值域为0~1,粘连程度越大,设定的值越接近1。
通过试验,量测获得影像中最小作物直径约为0.5 m,最大作物直径约为3.5 m,由此可知,研究区内树冠大小差异大。将增量数设定为20,确保0.5~3.5 m内每个类型的树冠都能被探测到,减小漏提率;将高斯平滑因子设定为0.5,减小影像中树冠内部和边缘的噪声影响;将允许重叠度设为50%,在已经去除树冠粘连的基础上,针对一些完全粘连的树冠,将其分离为单木树冠,从而提高单木位置提取的准确率。
3 结果与分析
3.1 树冠提取与去除树冠粘连流程和结果
树冠提取与去除树冠粘连的流程和结果见图4,其中,图4a~e表示树冠提取流程与结果,图4f~i表示去除树冠粘连的流程与结果。在图4中,图4a表示局部区域的DOM,区域内存在部分草地信息。采用VDVI以阈值0.027从DOM中得到植被信息,如图4b所示,植被与非植被分离效果较好,但草地与树冠具有相似的像素值。利用DSM与DEM构建CHM,如图4e所示,去除了植被图层中的非树冠信息。图4f表示局部区域的DOM,区域内显示树冠粘连。以CHM为基础,对其进行二值化,结果如图4h所示。采用形态学图像细化算法去除树冠粘连,结果如图4i所示。
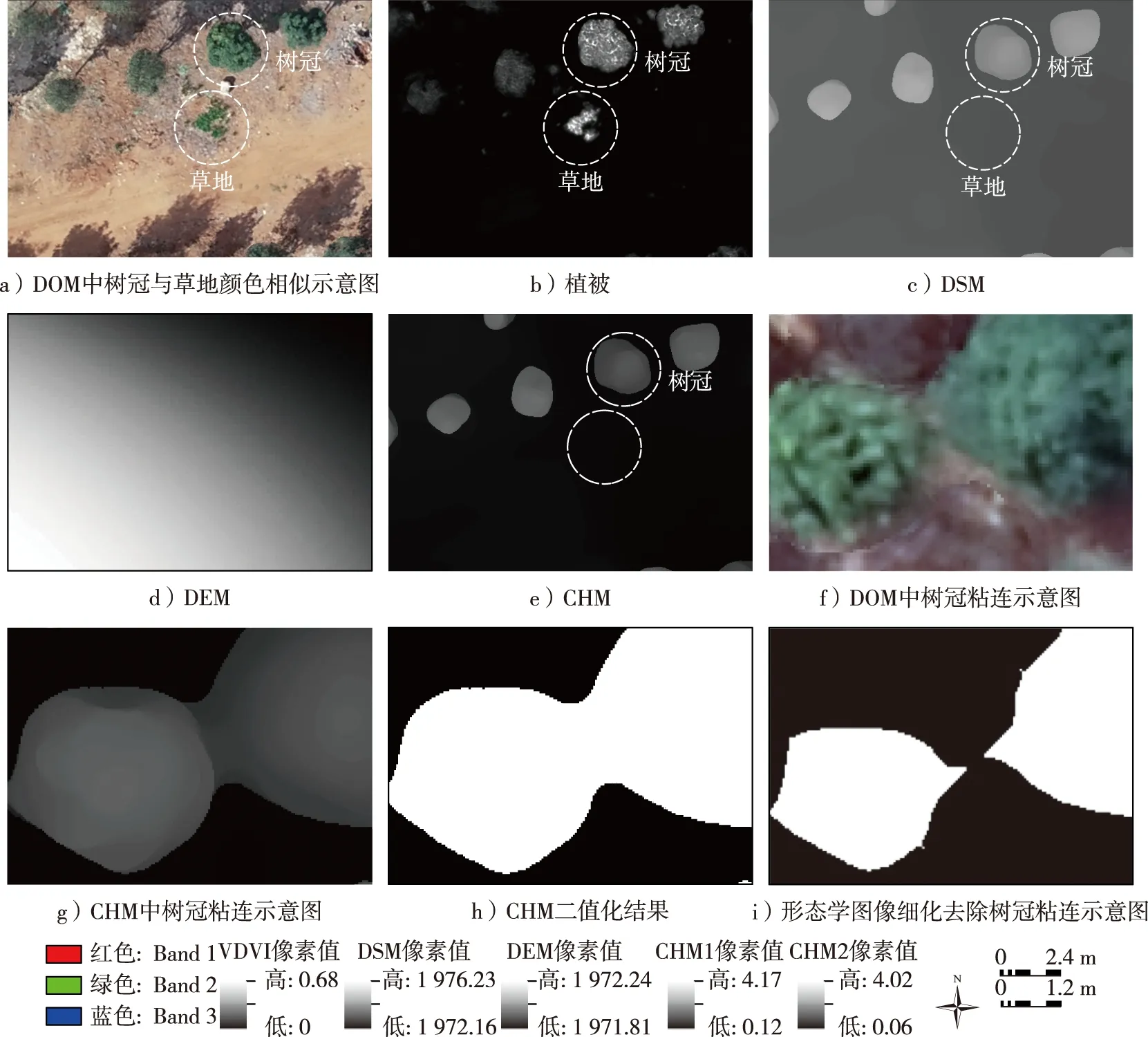
图4 树冠提取与去除树冠粘连的流程和结果Fig.4 Progress and results of crown extraction and removal of crown adhesion
3.2 单木位置提取结果
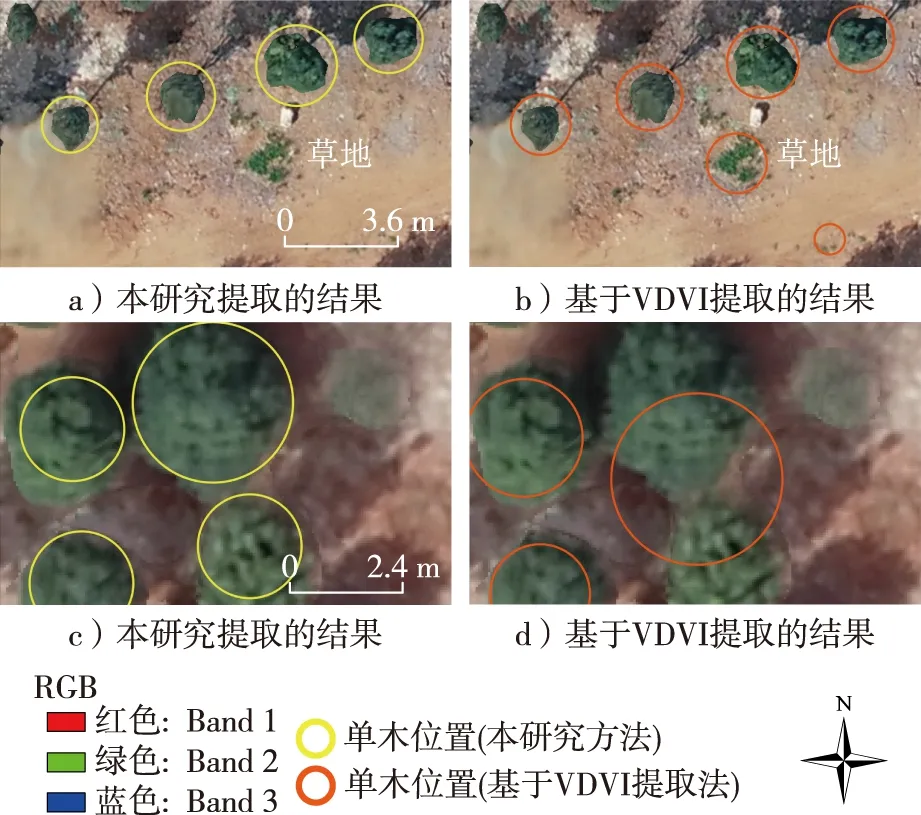
图5 局部区域试验结果对比Fig.5 Experimental result comparisons of local area
局部区域单木位置提取结果见图5,其中,图5a和c为本研究提取的结果,图5b和d为直接基于VDVI提取的结果,图中每个圆代表1个单木位置。对比2种方法的提取结果可以看到:图5b将草地误判为单木,而图5a结合了高程信息去除了草地,降低了错提率;图5d将2个粘连的树冠误判为1个树冠,而图5c去除了树冠粘连,2个粘连的树冠也得到正确提取,降低了错提率与漏提率。
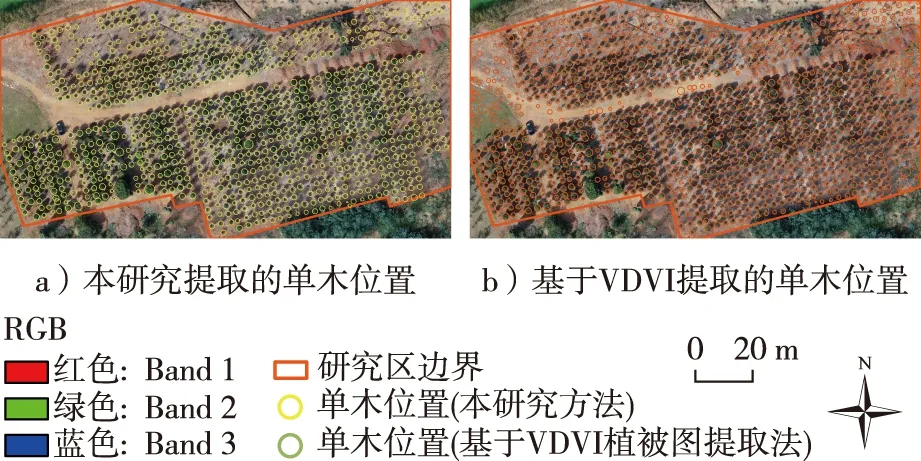
图6 单木位置提取结果及其对比Fig.6 Individual tree position extraction results and comparison
整体提取效果如图6所示。图6a为本研究提取结果,图6b为直接基于VDVI提取的结果。通过对比可以看到,在图6b中影像的中部(道路)、西北部、东部和东南部存在明显错提的情况,而与之对应的图6a中没有出现这种情况。通过分析可知,直接基于VDVI提取单木位置由于没有进行树冠与非树冠的分离,研究区内的草地、灌木被误判为单木;此外,没有进行去除树冠粘连,导致单木位置漏提与错提,其提取效果不如本研究方法。
3.3 提取精度分析
为定量化描述提取结果,采用目视解译的方式获取研究区中真实的单木位置作为验证数据。采用准确率(p)、漏提率(Oe)、错提率(Ce)3个指标进行精度验证[3]。p和Oe分别表示准确提取、漏提取单木占参考总单木的百分比;Ce表示错提取单木占试验提取总单木的百分比。其中,p与Oe之和为100%。计算方法为:
p=Nd/Nr
(7)
Oe=Ne/Nr
(8)
Ce=Nc/Na
(9)
式中:Nd表示正确提取的单木总数;Nr表示目视解译获得的单木总数;Na表示试验提取的单木总数;Ne表示漏提的单木数;Nc表示错提的单木数。
通过目视解译,研究区内共有树木912棵,本研究提取的树木数量为838棵,正确提取树木836棵,漏提76棵,错提2棵;直接基于VDVI提取的单木数量为1 024棵,正确提取树木803棵,漏提109棵,错提221棵。2种方法精度验证结果见表1。从表1中可以看出,直接基于VDVI提取的单木位置准确率为88.05%,漏提率为11.95%,错提率为21.58%;本研究方法提取的单木位置精度较好,其中,准确率为91.67%,漏提率为8.33%,错提率为0.24%。通过对比,采用本研究方法提取的单木位置准确率提高了3.62%,漏提率降低了3.62%,错提率降低了21.34%。主要原因是本研究方法结合了高程信息去除了非树冠信息,减小了草地、灌木等植被被误判为树冠的几率;同时,进行了去除树冠粘连,减小了错提率与漏提率。

表1 单木位置精度验证结果及其对比Table 1 Individual tree position accuracy verification results and its comparison
3.4 其他人工林单木位置提取结果
昆明理工大学呈贡校区内另一片人工林单木位置提取结果见图7,使用的影像采集设备和单木位置提取方法不变。
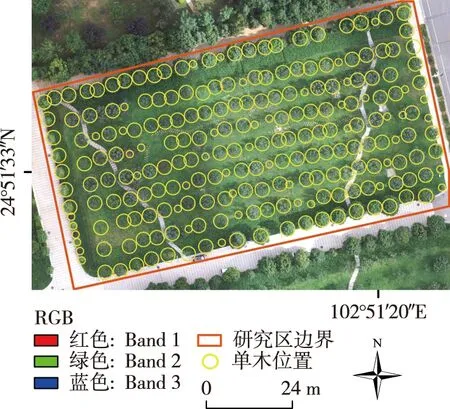
图7 其他人工林区单木位置提取结果Fig.7 Results of individual tree position extraction in another artificial forest area
影像采集时,受到旁边建筑物影子的影响,导致DOM中存在光照不均匀的现象,在图中表现为西侧亮度低、东侧亮度高;此外,研究区内树冠以下主要覆盖物为草地,其颜色与树冠相似。通过试验,获得的单木位置数量为227,通过目视解译及精度验证,图7中共有树木237棵,其中2棵树木属于错提,10棵树木属于漏提,准确率为94.94%,进一步证明了本研究方法的适用性。
4 结 论
以人工林区单木位置作为研究对象,以无人机RGB影像为数据源,在此基础上构建DOM、DEM和DSM产品数据。基于产品数据,采用VDVI从DOM中提取植被信息,结合DEM和DSM去除植被中的非树冠信息,然后采用形态学图像细化算法去除树冠粘连,最后提取单木位置。通过验证,提取的准确率为91.67%,漏提率为8.33%,错提率为0.24%,与直接基于VDVI提取的结果相比,本研究方法提取的单木位置准确率提高了3.62%,漏提率降低了3.62%,错提率降低了21.34%。研究得出以下结论:
1)基于无人机RGB影像获取的CHM可以从高程差异上区分树冠、草地、灌木,有效减小非树冠植被对单木位置提取的影响;
2)DOM中,树冠粘连极易导致单木位置漏提与错提,形态学图像细化算法可去除人工林树冠之间的粘连,对于提高单木位置提取精度较有效。
