太阳系边际探测飞行任务规划
2021-03-31田百义王大轶张相宇周文艳朱安文黄美丽
田百义,王大轶,张相宇,周文艳,朱安文,黄美丽,王 颖
(北京空间飞行器总体设计部,北京 100094)
0 引 言
太阳系边际通常以日球层为分界(如图1所示),其内部是主要受太阳风控制的区域,其边缘距离太阳约80~150 AU。日球层之外是广袤无垠的星际空间,充满了等离子体、中性原子、宇宙尘埃以及宇宙线等星际介质。开展太阳系边际探测任务有利于探测日球层内部结构,揭示银河系起源和演化,对我国空间科学与技术水平的全面发展、进入和探索宇宙空间能力的提升具有重要意义[1-3]。

图1 日球层及旅行者号探测器位置示意图Fig.1 Diagram of heliosphere and the position of the Voyager 1 and Voyager 2 probes relative to the heliosphere
实施太阳系边际探测不仅要求探测器在短时间内达到极高的飞行速度,而且对极远距离深空测控通信技术、大功率空间核电源技术、长期自主健康管理与自主运行技术等均有较高要求。目前国际上还尚未有专门的太阳系边际探测任务,但先驱者号[4]、旅行者号[5-6]及新地平线号[7]等探测外太阳系天体的探测器已经达到太阳系逃逸速度,在完成主任务后将继续飞往更远的太阳系边际。其中先驱者10号和11号的主任务是飞临木星和土星,它们分别于1973年12月和1979年9月完成其主要历史使命,并继续朝深空飞去,分别于2003年2月(约80 AU)和1995年11月(约45 AU)与地球失去联系。旅行者1号和2号的设计任务是飞临太阳系的行星系统,在完成其设计任务后,继续向日球层边缘飞行,但由于旅行者1号和2号的设计目标并不是探测太阳系边际空间,再加上因电力供应不足而提前关闭了一些探测设备,太阳系边际的关键物理参量仍有待于进一步的任务来获取。2006年1月,NASA发射了新视野号探测器,旨在对冥王星、冥卫一等柯伊伯带天体进行考察,目前在轨飞行速度约16.5 km/s,预计将于2038年飞临日球层边缘。由于新视野号携带的大多是一些光学成像测量设备,并且缺少磁场探测手段,因此也不适合专门的太阳系边际探测。
在太阳系边际探测飞行任务轨道研究方面,Craig[8]以太阳系逃逸时间为优化目标,研究了直接逃逸、木星借力逃逸和地球+木星借力逃逸飞行任务轨道;Douglas等[9]学者以探测器在给定时间内飞抵200 AU为目标,利用小推力直接转移轨道优化设计方法(Direct trajectory optimization method,DTOM)对比研究了直接飞行、1次借力和2次借力的飞行任务轨道(借力天体包括木星、土星、天王星和海王星),并选择1次木星借力的飞行任务方案,在此基础上给出了探测器的方案设计;Zeng等[10]学者提出了一种新型的双星太阳帆探测器的时间最优轨道设计方法,研究了时间最优的太阳系逃逸轨道设计;Matloff等[11]学者提出了太阳帆推进探测器在0.2 AU近日点的双曲轨道展开太阳帆、在椭圆轨道的近日点0.2 AU展开太阳翼和木星借力这三种可能的星际太阳帆探测方案设想。国内学者钱航等[12]以太阳帆在20年内飞行至200 AU以远星际探测为目标,研究了太阳帆通过行星借力和太阳借力的轨道全局优化问题,提出采用行星借力和太阳借力太阳帆轨道优化思路。
本文针对中国开展太阳系边际多目标探测任务的飞行任务规划问题,以给定时间内飞抵日心距100 AU为目标,采用小推力星际转移轨道的混合优化设计方法,系统研究了2024-2030年之间多次行星借力的飞行任务轨道方案,给出了地球-地球-木星(EEJ)、地球-地球-木星-冥王星(EEJP)、地球-地球-木星-海王星(EEJN)、地球-地球-地球-木星-海王星(EEEJN)和地球-火星-地球-木星-海王星(EMEJN)等飞行方案,为中国首个太阳系边际探测任务的实施提供参考。
1 任务约束分析
1.1 顶层任务约束
1) 发射日期约束:2024/1/1-2030/12/31。
2) 探测器在2049年1月1日的日心距不小于100 AU。
3) 鼻尖探测任务要求探测器到达100 AU处的位置矢量与日球层鼻尖矢量夹角优于10°;尾部探测任务要求探测器到达100 AU的位置矢量与日球层尾部矢量夹角优于45°。其中,日球层鼻尖矢量在J2000.0坐标系下的赤经为255°,赤纬为5°。
1.2 运载约束
1) 基础运载:发射C3小于30 km2·s-2,入轨质量为2800 kg@ C3=30 km2·s-2和3400 kg@C3=20 km2·s-2。
2) 基础运载+上面级:发射C3小于40 km2·s-2,入轨质量为2800 kg@C3=40 km2·s-2和3400 kg@C3=30 km2·s-2。
1.3 探测器约束
1) 探测器干重≥1950 kg。
2) 电推进系统推力:320 mN。
3) 电推进系统比冲:3500 s。
4) 考虑到探测器热防护问题,应避免地球内行星借力。
2 星际转移轨道优化设计方法介绍
利用探测器自身携带的核电推进系统,一方面需要完成相邻两次借力之间的轨道拼接,另一方面需要完成最后一次借力之后的加速逃逸。核电推进转移轨道设计的核心问题是确定地球发射日期、借力天体飞越时间、电推进弧段和电推进推力方向,而这一问题恰好可以转化为含有多个非线性约束的多参数优化问题,之后再利用优化算法进行求解,从而解决该问题。优化的参量即为整个任务设计过程中的时间变量,优化的目标为推进剂消耗最优,优化约束包括2049年1月1日的日心距不小于100 AU、行星飞越高度限制、行星借力的C3能量匹配,以及探测器飞行方向与日球层鼻尖或日球层尾部的夹角。待优化问题建立之后,可以利用目前比较成熟的智能优化算法进行搜索寻优,从而快速地找到一些满足要求并且性能较优的任务轨道[13-15]。
2.1 轨道动力学及优化模型介绍
采用间接优化方法进行轨道优化设计,推进段采用的轨道动力学模型[16-17]如下所示:
(1)
式中:r,v为飞行器的位置、速度矢量,m为探测器总质量,μ为中心天体引力系数,T为推力大小,α为推力方向的单位矢量,g0为海平面重力加速度,Isp为发动机比冲。
小推力飞行轨道的优化,即是求解最优控制问题:在满足各种约束的条件下,找寻小推力最优方向矢量α*,使探测器推进剂消耗量Δm达到最优
J=Δm→min
(2)
利用Pontryagin极小值原理,哈密尔顿函数可以表示为:
(3)
则最优推力方向α*可以通过式(4)获得,
(4)
将哈密尔顿函数对状态求偏导数可得到协状态方程,形式如下:
(5)
2.2 行星借力模型介绍
探测器在太阳引力场中近距离飞越借力天体时,由于借力天体的引力作用,探测器相对借力天体的双曲线剩余速度V∞方向会发生一定偏转,记为借力转角θ,其表达式为
(6)
式中:μp和Rp分别表示借力天体的引力常数和赤道半径,h为借力高度。

图2 两类借力飞行轨道Fig.2 Two kinds of planet gravity trajectories

本文采用基于B平面参数的行星借力模型[17],该模型以B平面角b(定义如图3所示,图中矢量M为B平面与日心黄道坐标系的交线)和近心点距rp为参数。取探测器飞入行星的双曲线剩余速度为V∞in=[vx∞-,vy∞-,vz∞-]T,则由B平面参数的几何关系,可以得到探测器的飞出双曲线剩余速度的矢量V∞out。
V∞out=[vx∞+,vy∞+,vz∞+]T
(7a)
(7b)
其中,

(8)
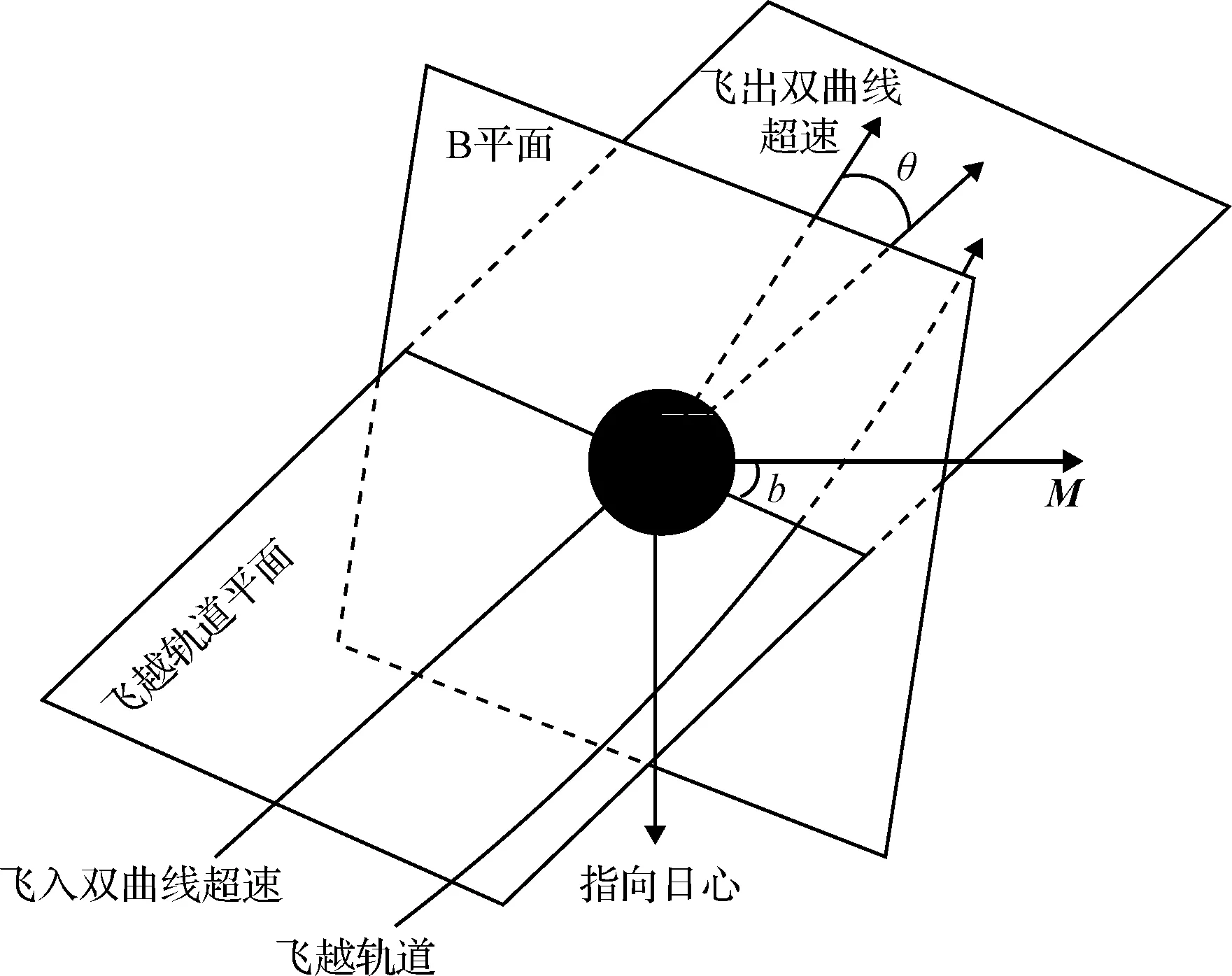
图3 B平面角示意图Fig.3 Diagram of B-plane angle
根据上述原理,若已知探测器的飞入双曲线剩余速度矢量、借力轨道近心点距rp和B平面角b,则可以得到探测器在飞越行星之后的双曲线剩余速度矢量。
2.3 小推力飞行控制策略设计方法介绍
本文取相邻两借力天体之间的小推力发动机工作序列为“滑行-推进-滑行”。以EEJ-100AU飞行轨道为例,图4给出了小推力飞行序列示意图。木星借力之后,以实现探测器加速逃逸太阳系为目标,不妨取小推力发动机沿速度方向连续推进,因此,木星借力之后的轨道无需进行一步优化。
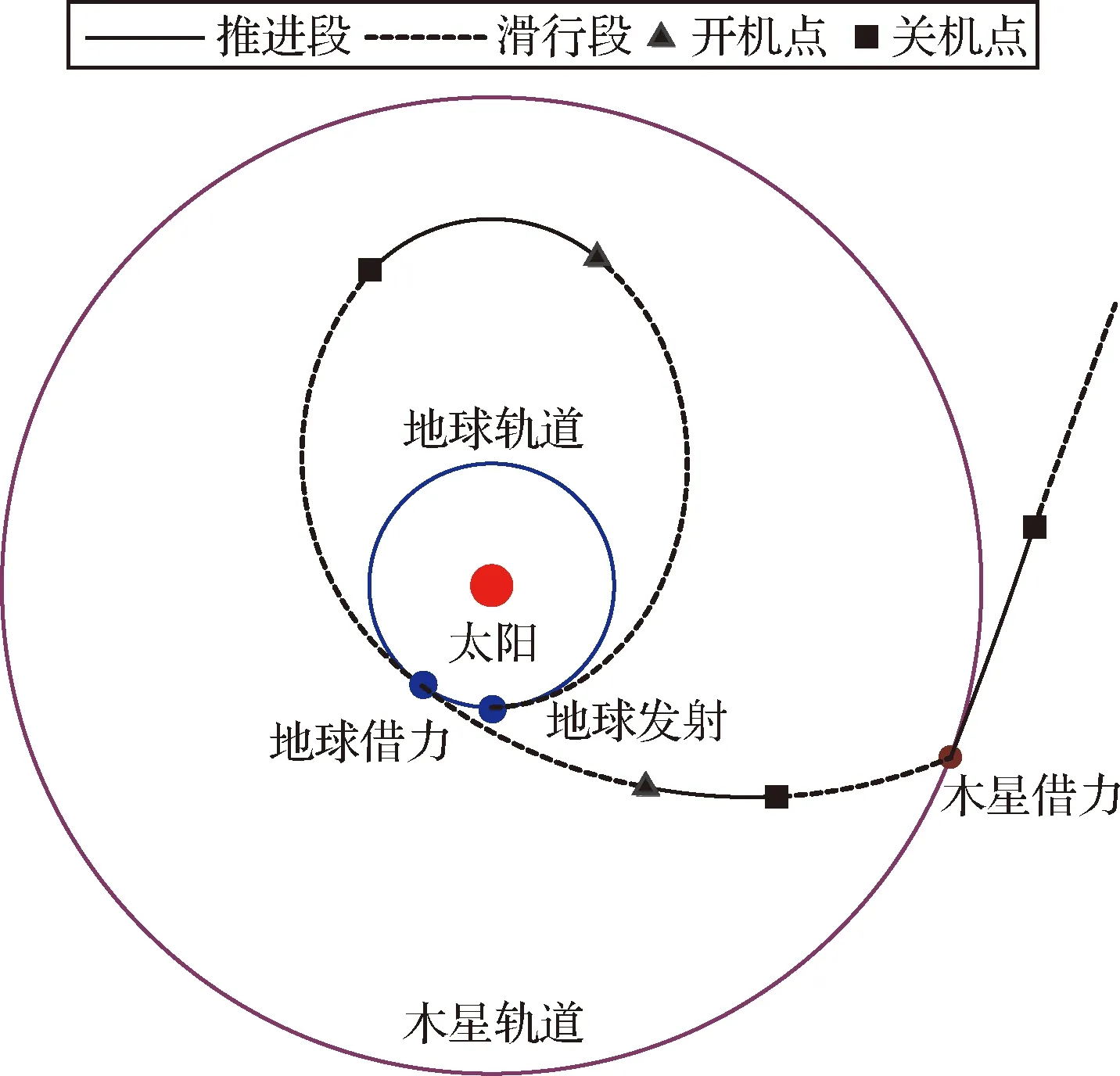
图4 探测器飞行序列示意图(EEJ-100AU)Fig.4 Diagram of the explorer flight sequence (EEJ-100AU)
针对探测器主要经历的EE和EJ两个飞行阶段而言,每段轨道的第1段滑行段,可根据初始位置和速度求解,而探测器的初始位置和速度可由行星星历和飞出双曲线剩余速度获取;针对推进段,可根据卫星初始状态(包括位置、速度和质量)及协状态,通过对动力学方程和协状态方程积分得到;针对第2段滑行段,可根据探测器的始末端位置通过求解兰伯特问题获取。
综上分析,待优化参数至少应包括如下29个:
1)探测器的地球发射时间tL和地球逃逸速度矢量V∞L,4个变量,用于确定EE段的初始位置和速度。
2)EE和EJ阶段的飞行总时间Ttof、滑行段时间和推进段时间占比δ0,δ1,6个变量,用于第1段滑行段和推进段的轨道递推,以及小推力关机点的参数打靶拼接。
3)两次行星借力B平面参数b,rp,4个变量,用于借力逃逸双曲线剩余速度的求解。
4)EE和EJ阶段发动机开机时刻的协状态λ0,14个变量,用于推进段的轨道递推。
5)木星借力之后小推力发动机工作时长Ton3,1个变量,加速探测器逃逸。
给定上述参数之后,可将多次行星借力的小推力飞行轨道优化问题转化为多参数优化的问题。
待优化参数:
Z=[tL,V∞L,Ttof1,δ01,δ11,Ttof2,δ02,δ12,Ton3,
b1,rp1,b2,rp2,λ01,λ02]T
优化指标:J=-mf→min
非线性约束:
1)2049年1月1日的探测器日心距不小于100 AU。
2)行星际转移期间,小推力发动机关机处的速度矢量连续。
上述非线性规划问题可以通过遗传算法、差分进化算法、模拟退火算法等全局优化算法求解,在全局优化结果的基础上,再采用序列二次规划算法进一步优化,从而完成小推力飞行控制策略的优化设计。
3 飞行任务规划分析
3.1 木星借力规律
探测器脱离太阳系进入宇宙空间所需的第三宇宙速度高达16.7 km/s,对应地球发射C3需求高达154 km2·s-2,目前的运载能力远远无法满足这一需求。因此,为实现2049年飞抵日心距100 AU处,必须通过行星借力的途径实现。表1给出了太阳系8大行星和冥王星的引力常数情况,由表1可知,木星是引力常数最大的一颗行星,且是距离地球最近的一颗可以1次引力甩摆使得探测器飞离太阳系的行星,木星是本次太阳系边际探测任务的最佳借力天体。

表1 太阳系各大天体引力和公转半径Table 1 Gravitational constant and revolution radius of celestial bodies
木星借力之后,探测器以双曲线轨道逃逸太阳系,若不考虑发动机工作影响,则其飞行轨迹近似为一条直线,且与日木连线近似垂直,因此,探测器的飞行方向与木星位置(借力日期)密切相关,不同的木星借力日期,探测器飞行方位不同。图5给出了不同的木星借力年份对应的探测器飞行方位示意图。由图5可知:1)2026-2030年之间借力,探测器的飞行方位朝向日球层鼻尖方向;2)2032-2036年之间借力,探测器的飞行方位朝向日球层尾部方向。
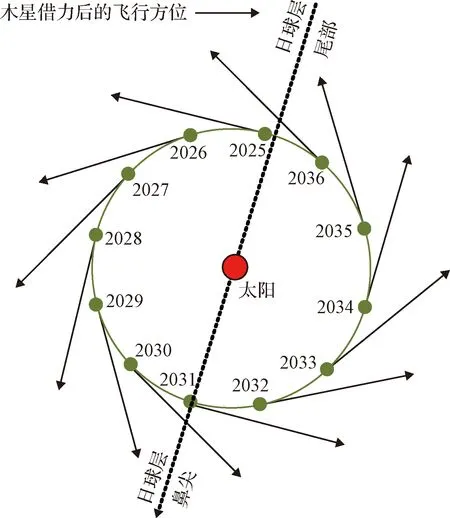
图5 不同木星借力日期对应的探测器飞行方位示意图Fig.5 Illustration of probes flying directions for different Jupiter’s gravity assist date
3.2 木星借力后行星飞越目标的确定
从行星相位的角度分析,图6给出了2029-2034年前后木星位置,以及2035-2040年之间土星、天王星、海王星和冥王星的位置情况。由于木星借力后以双曲线形式逃逸太阳系,若不考虑推力影响,其飞行轨迹近似为与日木连线垂直的一条直线。因此探测器可选的飞行区域如图6所示。
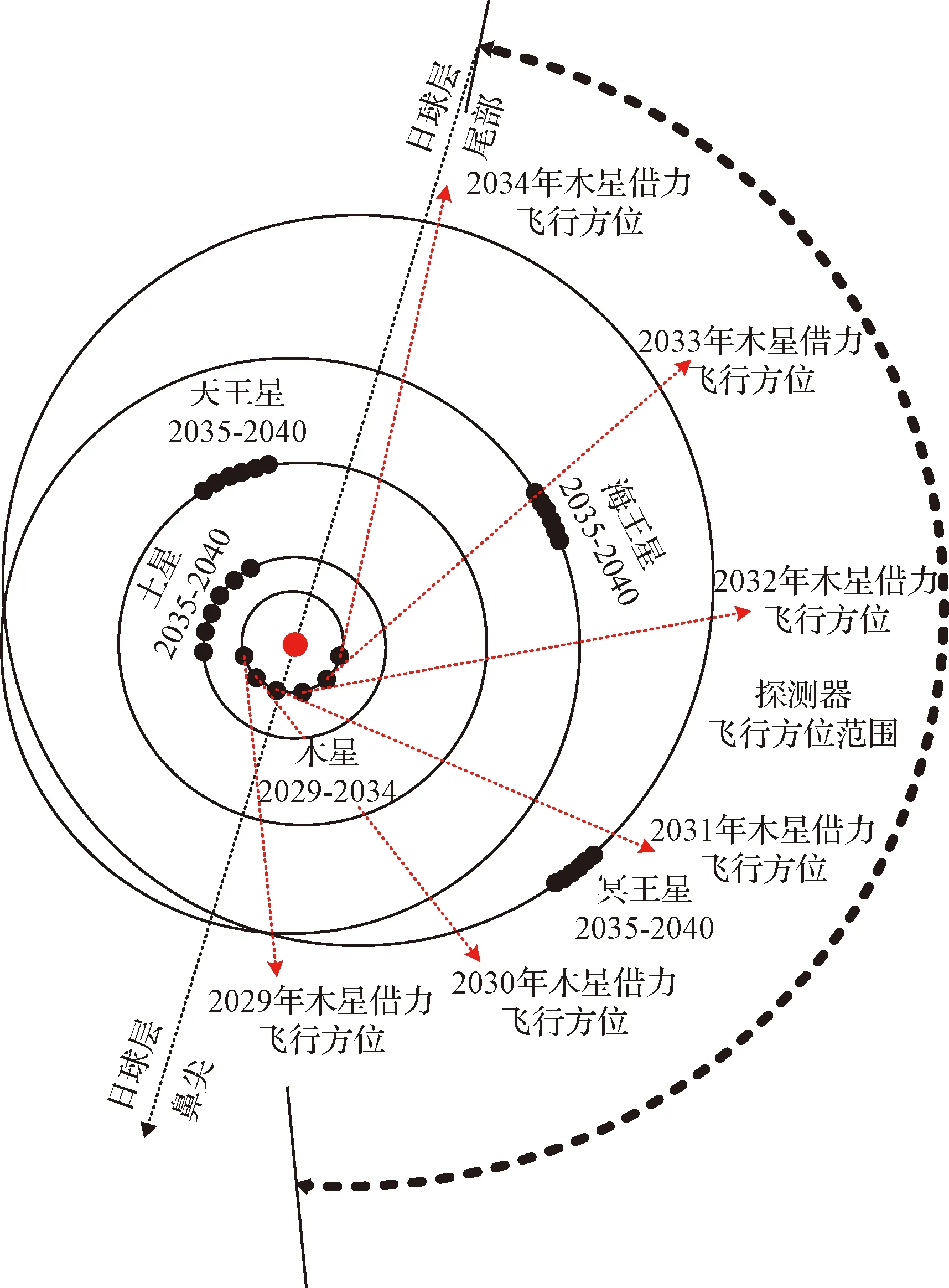
图6 木星轨道以外的行星位置分布Fig.6 Location of planets outside Jupiter’s orbit
由图6可知,探测器在木星借力之后可飞越的天体仅有海王星或者冥王星。
1)针对日球层尾部探测任务,可选择飞越海王星,海王星引力为地球引力的17倍,可对探测器逃逸太阳系形成进一步的加速效应。
2)针对日球层鼻尖探测任务,不具备木星以外行星飞越的条件;若必须飞越一颗行星,则建议选择冥王星,但会牺牲探测器位置方位与鼻尖方位的夹角(接近垂直);此外,冥王星引力较小,仅为地球引力的2.5%,对太阳系逃逸飞行任务帮助较小。
3.3 行星借力序列分析
考虑到探测器热防护问题,应避免地球轨道以内的行星借力。因此,在地木轨道之间,可选的借力天体仅为地球和火星。
3.3.1日球层鼻尖探测
针对日球层鼻尖探测任务,为实现探测器到达100 AU处的位置矢量与鼻尖矢量夹角小于10°的约束,木星借力的日期应在2030年之前。考虑到地木转移窗口的分布,可选的木星借力日期仅有2028年4月和2029年5月,因此,留给地球发射至木星借力之间的飞行时间较短,不足5年的时间。为缩短木星借力之前的飞行时间,行星的借力次数不宜太多,考虑到探测器发射C3约束,木星借力之前应再增加一次地球或火星借力,即采用EEJ或EMJ的飞行序列。
若采用EMJ飞行序列,则地火转移窗口决定了整个借力序列的窗口,根据地火转移发射能量图(见图7)可以很容易得到地球发射C3小于40 km2·s-2的窗口分布。地火转移轨道包括短转移和长转移,其中短转移表示探测器飞行的日心相角小于180°,其窗口见图7的下半部分;长转移表示探测器飞行的日心相角大于180°,其窗口见图7的上半部分。

表2 地木转移窗口分布情况Table 2 Distribution of Earth-Jupiter transfer windows
1)地火短转移。由地火发射C3能量图(见图7)可知,地火短转移的发射日期集中在2026年10月-2027年1月,飞行时间为4~10个月,因此,火星借力的日期应集中在2027年2月-2027年11月;而由火木发射C3能量图分布(见图8)可知火星的借力日期需集中在2028年4月之后。由此可见,地火转移和火木转移的窗口不存在交叉,因此不具备火星借力机会。
2)地火长转移。在地球发射C3小于40 km2·s-2的约束下,火星借力C3小于105 km2·s-2。而根据火木转移发射C3图可知,火星借力C3小于105 km2·s-2情况下的火木转移时间大于460天,对应木星借力的日期在2030年2月之后。而根据木星借力之后的飞行方位图(见图5)可知,探测器到达鼻尖时的位置矢量与鼻尖矢量夹角将大于50°,明显无法满足夹角小于10°的需求,因此,针对日球层鼻尖探测任务,火星借力不可取。

图7 地球-火星发射C3能量分布图Fig.7 Earth-Mars launch C3 energy diagram

图8 火星-木星发射C3能量分布图Fig.8 Mars-Jupiter launch C3 energy diagram
综上分析,日球层鼻尖探测任务应采用EEJ的飞行序列。
3.3.2日球层尾部探测
针对日球层尾部探测任务,木星借力的日期应在2032年之后,留给地球发射至木星借力之间的飞行时间较为充足(大于5年的时间)。除EEJ飞行序列之外,从减小探测器发射C3的角度考虑,探测器也可以采用2次地球借力的EEEJ飞行序列。此外,为增大任务的科学回报,木星借力之后,应再进行一次海王星借力。综上,探测器可选择EEJ,EEJN和EEEJN三种飞行序列。
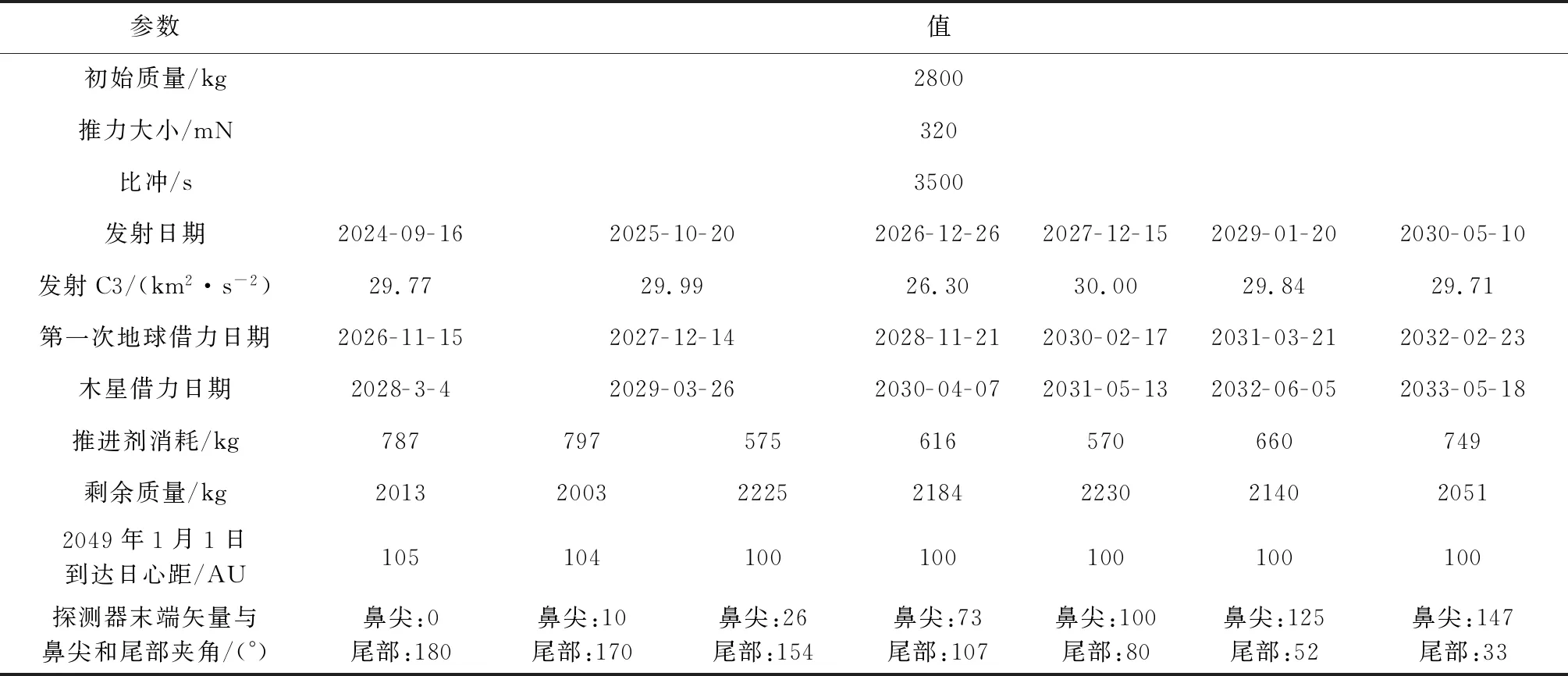
表3 EEJ飞行序列下不同发射日期的轨道优化结果Table 3 Optimal trajectories of EEJ flight series for different launch time
4 星际飞行轨道设计与优化
4.1 EEJ飞行轨道
表3给出了EEJ飞行序列不同发射日期对应的轨道优化情况,优化结果与前述分析结果一致。由表中数据可知:针对日球层鼻尖探测,满足任务需求的窗口出现在2024年9月和2025年10月;针对日球层尾部探测,满足任务需求的窗口出现在2030年5月。
其中针对日球层鼻尖探测任务的2025年窗口,由于探测器末端位置矢量与鼻尖矢量夹角为26.3°,不满足鼻尖探测任务提出的优于10°需求,但是探测器推进剂仅消耗了575 kg,仍有275 kg的余量,可以利用该余量进一步减小该夹角,图9给出了探测器末端位置矢量与鼻尖矢量夹角随推进剂余量的变化情况。由图9可知,当推进剂完全消耗后,可将该夹角减小至6.9°。取该夹角为10°时,对应的推进剂余量为53 kg。
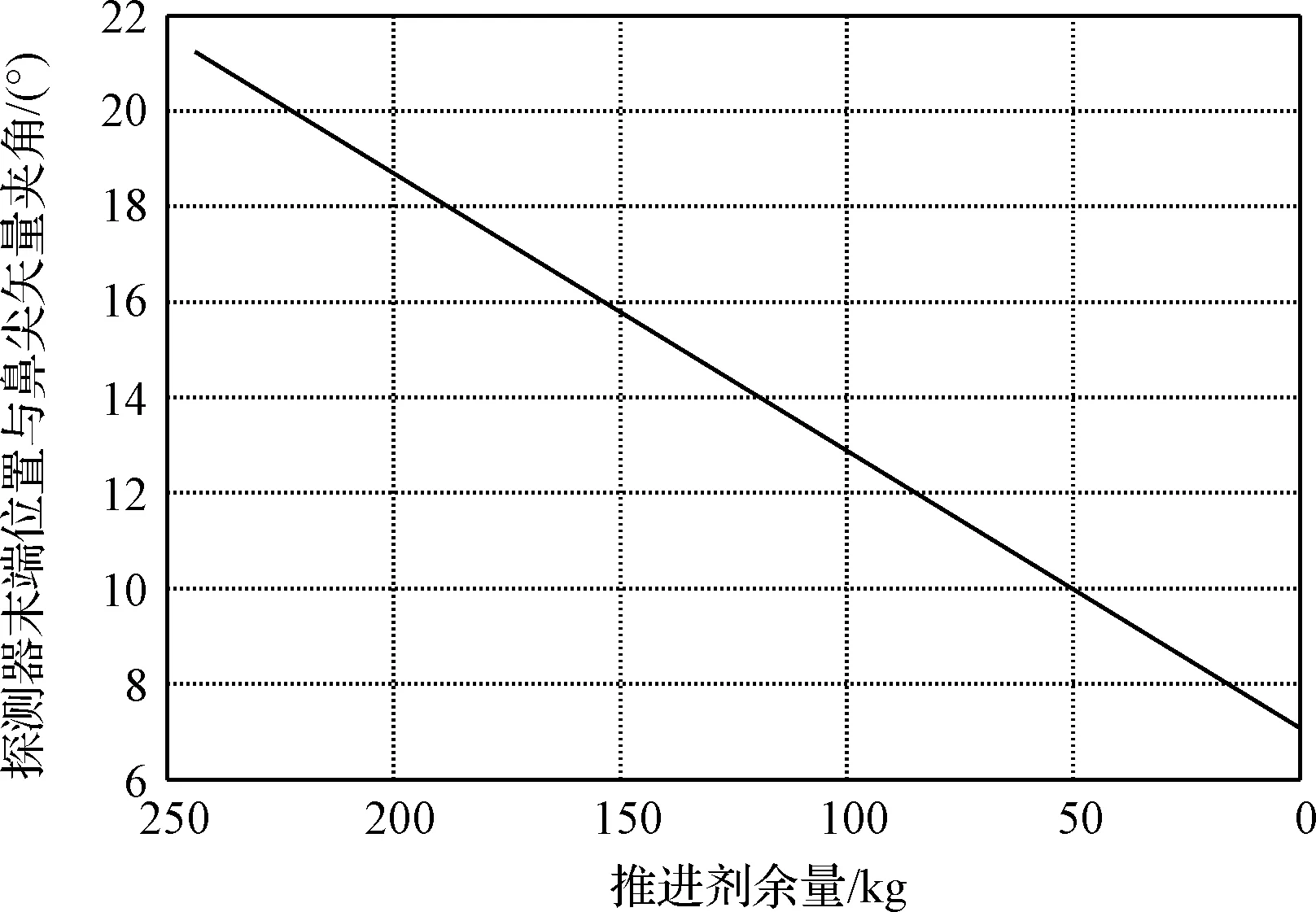
图9 末端位置矢量与鼻尖矢量夹角调整能力Fig.9 Probe’s ability of adjusting the angle between the end position vector and the nasal tip
图10给出了不同发射日期对应的EEJ飞行轨道示意图以及海王星和冥王星方位。由图10可知:针对2026年12月26日的轨道,可以微调木星借力日期,以较小代价实现冥王星探测;从探测器飞行轨道距离海王星远近的角度考虑,最容易实现海王星飞越的窗口为2029年1月20日,其后依次为2030年5月10日和2027年12月15日。
下面重点对EEJP和EEJN两种飞行序列进行优化分析。
4.2 EEJ-N/P飞行轨道
根据图10可知,以EEJ飞行序列为基础,可对冥王星和海王星进行飞越探测,其中2027年的窗口可飞越冥王星;2028年、2029年和2030年的窗口可飞越海王星,这与第3.2节的分析结论一致。表4给出了不同发射日期对应的EEJ-N/P轨道优化结果。

图10 EEJ序列下不同发射日期的飞行轨道示意图及行星位置Fig.10 Illustration of the optimal trajectories for EEJ flight series and planets location
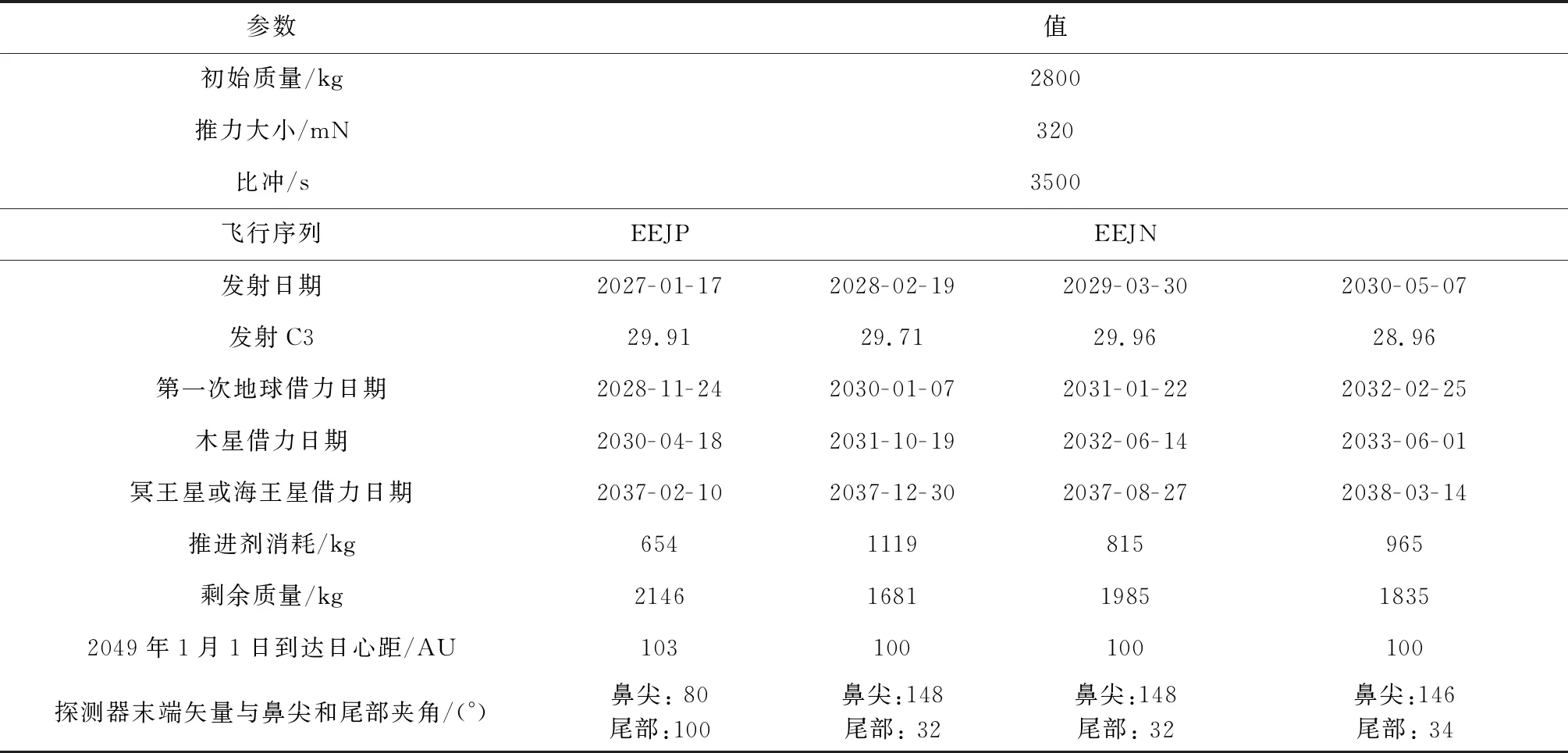
表4 EEJ-N/P飞行序列下不同发射日期的轨道优化结果Table 4 Optimal trajectories of EEJ-N/P flight series for different launch time
由表4可知:
1)EEJP序列最优的发射日期在2027年1月17日前后,可在2049年1月1日前到达103 AU,共消耗654 kg推进剂,但是探测器末端矢量与鼻尖夹角高达80°,无法满足日球层鼻尖或尾部探测的夹角需求。
2)EEJN序列最优的发射日期在2029年3月30日前后,且满足日球层尾部探测任务的发射、推进剂和夹角等约束条件,而2028年和2030年的发射窗口则不满足推进剂约束,这与图10所展示的EEJ飞行轨道和行星方位分布结论一致。
4.3 EEJN飞行轨道改进
由表4可知,日球层尾部探测最优的海王星借力日期在2037年9月左右。为达到这一最优的海王星借力条件,且将发射日期提前,可对EEJN飞行轨道进行改进。主要改进途径有如下4条:
1)在2028年2月19日的EEJN飞行轨道基础上,将探测器的推进剂携带量增至1450 kg,使其总质量达到3400 kg。
2)地球发射至地球借力之间多飞一圈,即将EE飞行时间增大约一倍。
3)在地球借力之前再引入一次地球借力,即采用两次地球借力的EEEJN的飞行序列。
4)在2029年3月30日的EEJN飞行轨道基础上引入一次火星借力,即采用EMEJN飞行序列。
上述四条途径均可将地球发射日期提前,表5给出了EEJN改进轨道的优化设计结果。
由表5可知:
1)采用改进途径1,探测器入轨的总质量为3400 kg,则消耗1250 kg的推进剂即可实现日球层尾部探测任务,且满足尾部探测器的各项任务约束。
2)针对改进途径2,EE飞行时间由原来的663天(约1.82年)延长至1733天(约4.75年),且发射C3需求增加至40 km2·s-2。探测器消耗800 kg燃料,可在2049年1月1日到达101 AU,满足任务各项约束条件。但是,与2029年3月30日的EEJN方案相比,该方案仅将发射日期提前至了2027年,其他条件并不如2029年3月发射的方案。
3)针对改进途径3,增加一次地球借力并没有进一步减小推进剂需求,反而增加了推进剂消耗,显得得不偿失。但是,可以极大地减小运载发射C3需求(由30 km2·s-2减小至0~5 km2·s-2),对应探测器的推进剂携带量可增至1450 kg,使其总质量达到3400 kg,则探测器消耗1286 kg的推进剂即可实现日球层尾部探测任务。
4)针对改进途径4,EMEJN飞行序列将发射日期提前到了2028年12月27日,且发射C3减少至20 km2·s-2,对应探测器初始质量可提高至3400 kg,极大地提高了探测器剩余质量。
5 结 论
文章针对太阳系日球层鼻尖和尾部探测任务进行了规划分析,并对星际转移轨道飞行方案进行了优化设计,表6给出了满足任务约束的星际飞行序列。
设计结果表明:
1)满足鼻尖探测任务需求的飞行序列为EEJ,发射窗口位于2024-2025年。
2)满足尾部探测任务需求的飞行序列可选EEJ,EEJN,EEEJN和EMEJN四种,发射窗口位于2027-2030年。
其中,日球层鼻尖探测任务与旅行者号相比,探测器在100 AU处的赤经、赤纬以及探测区域分布分别见表7和图11。旅行者号探测区域位于日球层鼻尖区的北边界和西南边界处,本次日球层鼻尖探测任务位于鼻尖中心区域,可与旅行者号探测器形成有效互补。后续,探测器系统需根据鼻尖区域的空间环境做好防护设计。
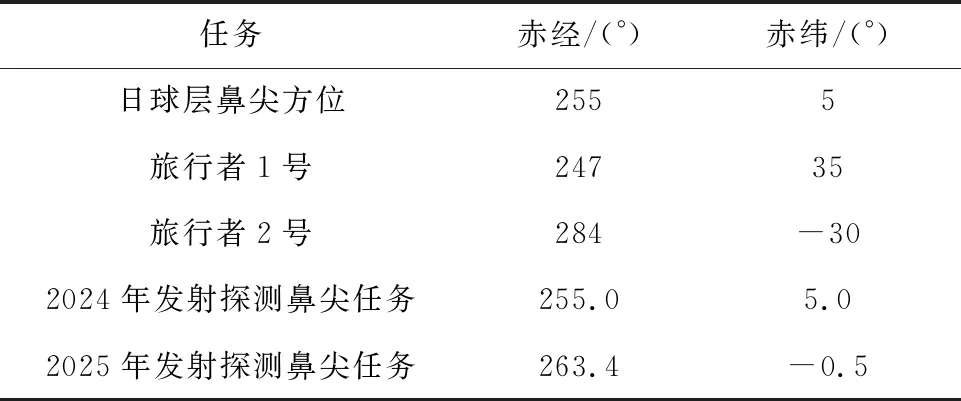
表7 探测器在100 AU处的赤经赤纬及与旅行者号对比Table 7 Probe right ascension and declination at 100 AU comparison between nasal tip explore misson and Voyager
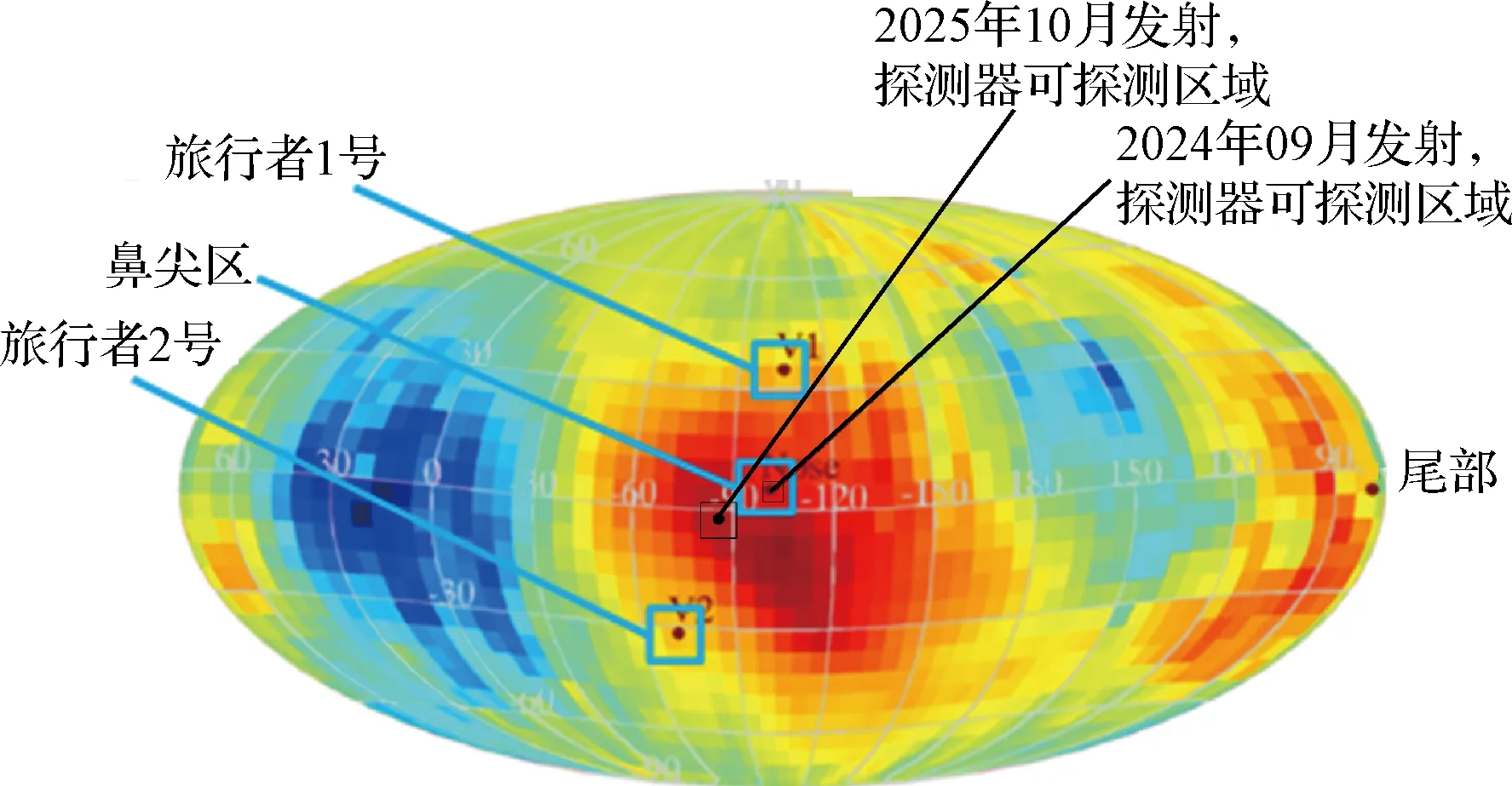
图11 日球层鼻尖探测任务对比情况Fig.11 The detection area comparison between nasal tip explore misson and Voyager
文章给出的飞行轨道设计方案能够为太阳系边际多目标探测任务实施提供参考,所采用的设计思路,可为太阳系边际探测的自主任务规划技术提供基础。
