基于正则极限学习机的鞋面缺陷图像识别方法研究
2021-03-29陈耀东邓三鹏佘明辉白晋红陈辉煌
陈耀东 邓三鹏* 佘明辉 白晋红 陈辉煌
(1 天津职业技术师范大学机器人及智能装备研究院,天津,300222;2 天津市智能机器人技术及应用企业重点实验室,天津,300352;3 湄洲湾职业技术学院,福建莆田,351119)
0 引言
当前,制鞋企业在鞋面质量检测时通常采用人工检测[1],存在劳动强度大、效率低等问题。人工测量时,还易因个体差异造成检测误差,合格率降低。因此,将机器视觉技术引入鞋面检测过程,可大大提高生产的效率和检测精度,降低工人的负担和企业生产成本。
机器视觉技术可实现对鞋面特征点域进行分割,确定鞋面缺陷轮廓,通过多特征值提取,进行相应的缺陷识别。其中,特征值常用识别算法主要包括:
1)支持向量机特征识别法[2];山东理工大学的崔欣团队通过对玉米种粒破损的16 个特征值进行支持向量机的算法训练,结果达到了识别的精度要求,但在计算上花费大量的时间造成训练数据结果极其不稳定。
2)极限学习算法识别[3];重庆大学的王见团队对棉花的数据集特征提取,利用极限学习算法(ELM)对棉花进行识别,达到了模型识别的利用率,但基本的ELM算法容易过拟合或不太稳定。
因此,考虑到训练时间和算法拟合的稳定性,本文引入正则极限学习算法(RELM),通过添加惩罚因子(套索法[4])或惩罚因子(山脊回归[5])来克服上述问题。
RELM 算法[6]可以利用或惩罚得到稀疏的或稳定的解,并利用弹性网络惩罚修剪神经网络的结构。本文将机器学习中的RELM 算法模型运用到鞋面缺陷检测中,对特征值进行训练识别,为制鞋企业实现自动化缺陷检测奠定了基础。
1 鞋面缺陷识别检测RELM 算法
鞋面缺陷识别方法主要包括:
1)多特征值训练样本和测试样本分类;
2)对训练样本进行RELM 算法训练;
3)训练样本训练后,建立RELM 算法识别模型;
4)根据训练好的算法模型对测试样本进行RELM 算法识别;
5)最终显示测试样本的准确率和训练时间结果。
具体算法识别流程如图1 所示。
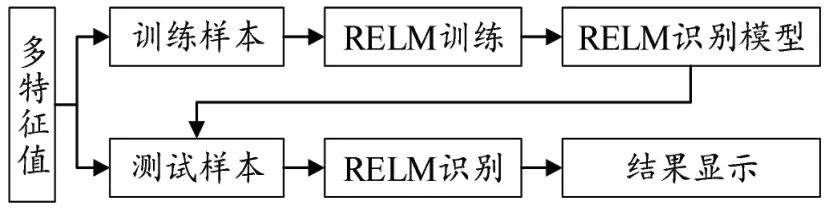
图1 RELM 算法识别流程
极限学习算法是由南洋理工大学黄广斌教授团队提出的[7-8]。传统的BP 神经网络算法需要大量的训练网络参数,而且容易产生局部最优解。ELM 算法设置网络的隐层节点个数,在算法执行中不需要调整网络的输入权值和隐性神经元的偏置,便可产生唯一的最优解。其数学模型如式(1)所示。

结果如公式(2)所示:

为缩短检测时间,需对识别分类系统进行简化。本文选择使用正参数和正则化因子的RELM 分类器。将1000 张实验采集到的鞋面图像分为800 张训练样本和200 张测试样本。用训练样本进行训练,一共16 个特征值,将待检测的鞋面图像分为两类,“1”代表的是合格,“0”代表的是不合格。模型训练中的16 个特征值代表输入,是否合格代表输出。选择RBF 核函数[2],将输入类特征图像样本进行归一化和构造核函数矩阵H{1,1},计算出正参数和正则化因子,最终构造出RELM 最优识别模型。
2 鞋面图像采集及预处理
2.1 鞋面缺陷图像采集
鞋面图像采集均在鞋面采集实验平台装置上进行。鞋子的尺码大小是40-43 码(中国尺码),共采集带有缺陷鞋面图像与完整鞋面图像各800张,进行图像预处理、多特征值的提取、对RELM 进行训练及识别缺陷检测等工作,鞋面缺陷图像主要包括:鞋面溢胶(200 张)、鞋面污渍(200 张)、鞋面开裂(200 张)、涂层脱落(200张),鞋面缺陷图像如图2 所示。

图2 鞋面缺陷图像
2.2 图像预处理
进行鞋面特征提取之前,需对采集到的鞋面图像进行预处理。处理后的图像便于特征值的提取,可实现精确的图像特征识别[9]。
预处理具体流程如图3 所示。先将鞋面图像进行灰度处理,对灰度处理后的图像进行滤波降噪;图像降噪后,把灰度图像转换成二值化图像,二值化图像有利于进行缺陷边缘轮廓的提取,最后通过边缘化图像进行目标值的特征提取。
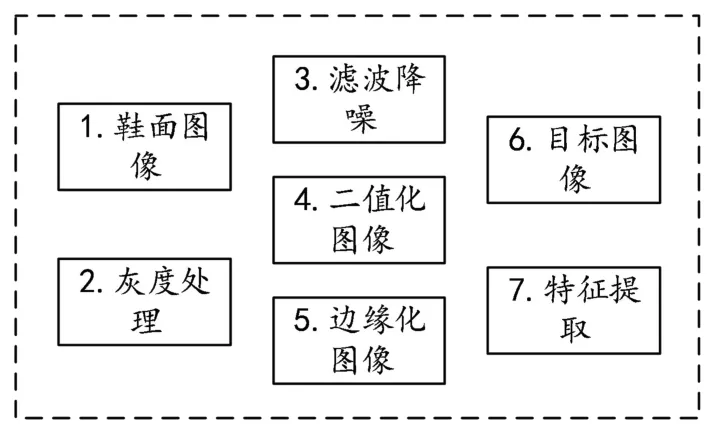
图3 预处理流程
2.2.1 图像滤波降噪
对鞋面图像灰度处理后,由图4 降噪前图像可知,采集到的鞋面图像表面极其不光滑,存在一定的细小颗粒,判断为椒盐噪声。
图像滤波降噪是为了把重要的细节特征保留,对图像的噪声进行抑制。由文献[10]可知,中值滤波是去除椒盐噪声的最好方法。因此,对鞋面图像降噪处理采用中值滤波的方法。经过中值滤波处理后,鞋面颗粒噪声点大大减少,如图4 降噪后图像所示,这有利于图片的进一步处理。
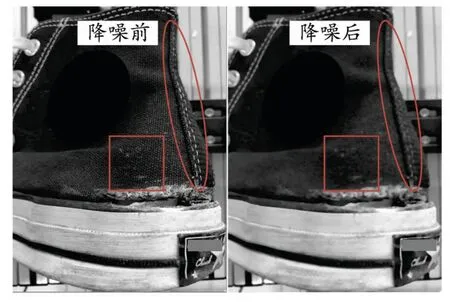
图4 灰度图像降噪前后对比
2.2.2 图像多特征提取
在鞋面缺陷图像的识别系统中,鞋面质量的识别精度取决于鞋面缺陷特征参数的选用和提取。由文献[11]可知,图像的特征值主要包括:几何特征值、形状特征值、颜色特征值等。
鞋面缺陷主要是溢胶、开裂、脱落、污渍,由鞋面存在的缺陷可知,鞋面缺陷颜色特征值与完整鞋面颜色特征值对比不明显,所以不适用颜色特征值的提取。几何特征值和形状特征值的提取是本次实现检测鞋面质量的重要指标。
1)几何特征提取。
有缺陷的鞋面图像与合格的鞋面图像存在不同的几何图像特征,对有缺陷的鞋面形态特征进行缺陷的周长、面积、长轴长度、短轴长度、长宽比、周长/面积6 个几何特征值提取,鞋面几何特征提取示意图如图5 所示,几何特征参数表如表1 所示。
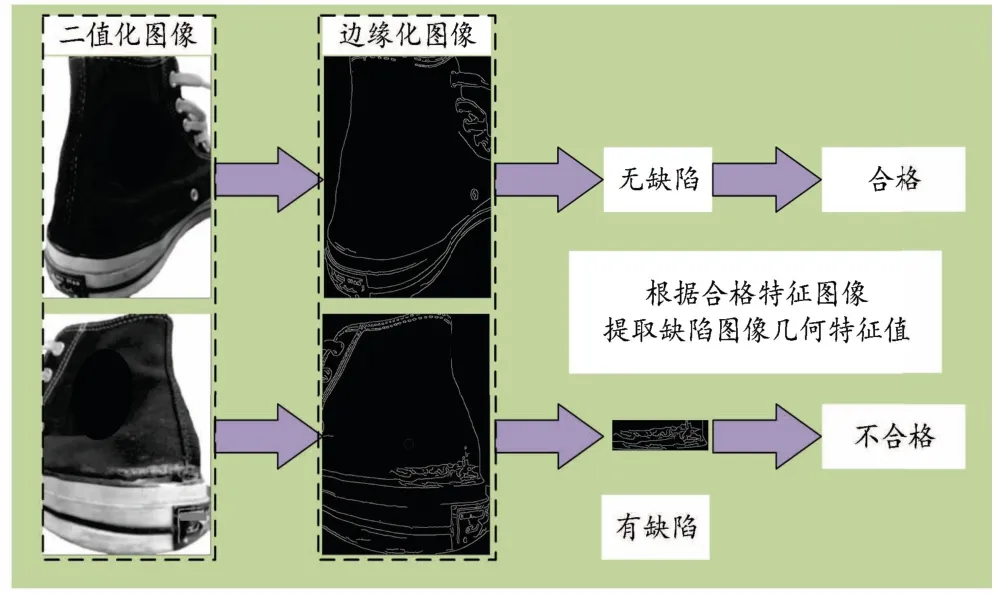
图5 几何特征提取步骤流程

表1 几何特征参数表
2)形状特征提取。
形状特征主要进行了4 个特征值的提取,包括Hu1-Hu7、矩形度、圆形度、紧凑度,如表2 所示。

表2 形状特征参数表
提取Hu 不变矩步骤:首先对灰度化图像进行零阶矩和一阶矩计算,通过零阶矩和一阶矩计算出三阶及以上中心距,对所有阶矩进行归一化处理,最终得出7 个Hu不变矩,具体流程图如图6 所示。
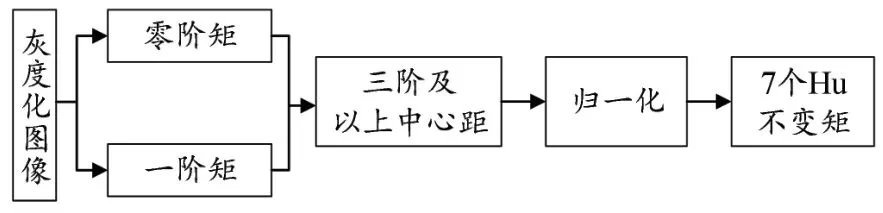
图6 提取Hu 不变矩流程
3 实验验证与结果分析
3.1 实验平台
鞋面缺陷图像采集系统主要包括:鞋面图像采集平台、2 个光源灯、4 个CCD 摄像头和1 台计算机,相机的位置分别拍摄鞋面的左视图、右视图、俯视图、后视图,实验平台如图7 所示。
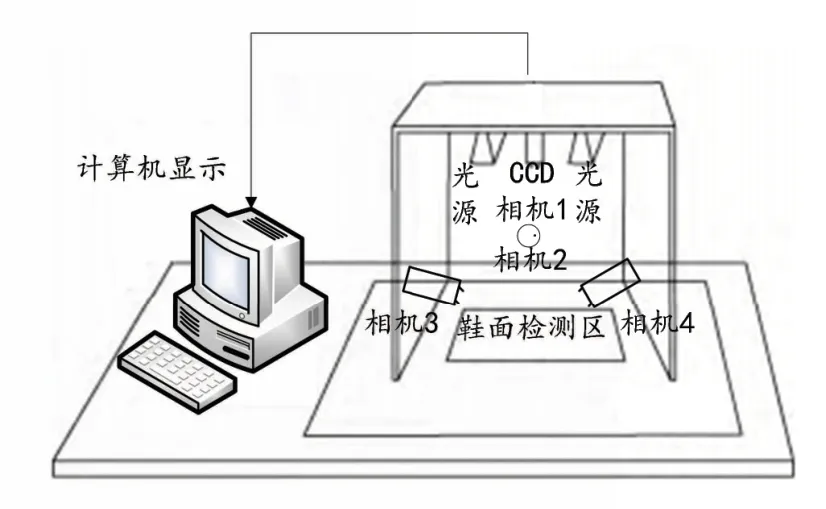
图7 鞋面采集实验平台
其中,相机采用工业面阵相机,分辨率为4096×3072,采集到的成像尺寸为60mm×45mm,特征最小尺寸0.2mm,相机镜头到鞋面检测台的垂直距离40cm。为防止外界光照对拍摄效果产生的干扰,开启LED 条形光源,照射在待检测鞋面的侧面,产生可调的LED 光。
3.2 RELM 模型实验
为验证鞋面缺陷图像识别方法的可行性与准确性,笔者设计了RELM 算法识别模型实验。
用16 个特征值对训练样本进行训练,以训练样本的正确率、识别时间作为衡量RELM 模型的指标。其中,训练识别率是指正确识别的鞋面缺陷数占所有鞋面的比值;训练时间指用RELM 算法识别模型对训练样本进行识别所需时间。试验反复训练20 次,除去正确率和识别时间的最大值和最小值,取18 次训练平均值,如图8 所示。
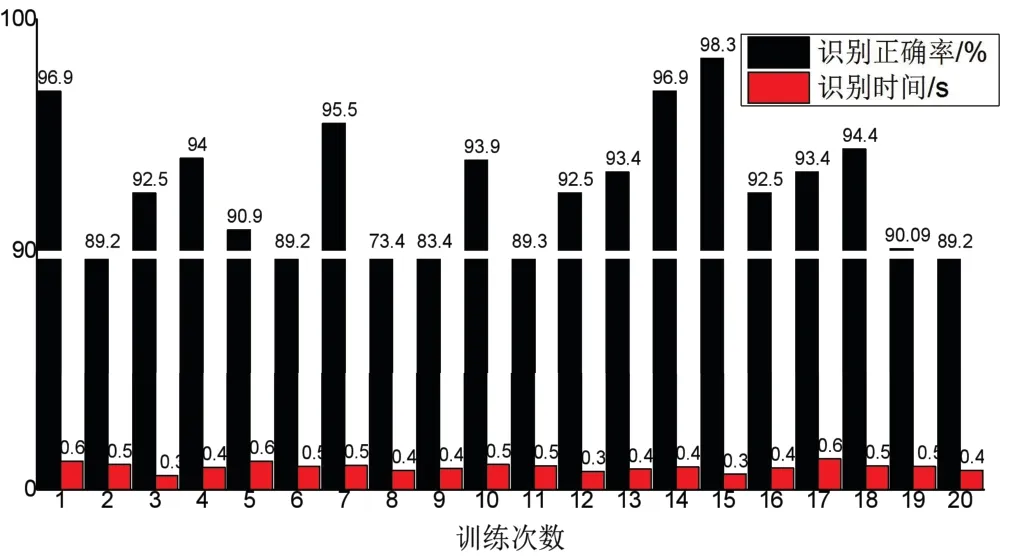
图8 训练过程
用200 张测试样本图像对RELM 算法模型验证,将测试的鞋面缺陷检测结果与实验前识别结果做对比。以实验前识别结果为基准,反复测试正确率与识别时间,取测试均值,最终得出模型识别的正确率和识别所需时间,结果如表3 所示。

表3 实验结果
4 结论
本文提出了一种基于正则极限学习算法识别鞋面缺陷的方法,主要结论如下:
1)利用中值滤波的方法对图像进行滤波降噪,降噪后对图像进行二值化和边缘化的处理,从而便于鞋面缺陷的特征提取。
2)提取了鞋面缺陷边缘图像的6 个几何特征值和4个形状特征值,实现了特征值对RELM 算法的样本训练和模型训练。
3)实现了RELM 模型对测试样本的测试,实验证明,该方法满足鞋面缺陷检测时间和正确率的要求。