治疗性内镜机器人的历史与发展
2021-03-29周梦雨马以诺孙丽萍
周梦雨 马以诺 孙丽萍*
(1 上海健康医学院医疗器械学院,上海,201318;2 上海理工大学健康科学与工程学院,上海,200093)
0 引言
内窥镜技术相当于把医生的眼睛带入到患者体内,这项技术大约200 年前开始被人们使用[1-4]。内窥镜一开始只是简单被用于诊断消化系统类疾病的一种重要工具,随着机器人和计算机技术的发展,越来越多机器人内窥镜平台被开发、测试和应用,内窥镜的作用被极大地扩充,如今内窥镜在微创外科手术中成为不可替代的一部分。所谓微创医疗技术,旨在减少诊断或手术期间受损的外部组织的数量,从而缩短患者的恢复时间、减轻患者的不适并且减少有害的副作用。
传统的内窥镜腹腔手术需要医生手持器械,精准度不高,手腕容易颤抖且自由度非常有限,即使是非常有经验的医生操作起来也很难,所以只能选择一些便于操作的病例进行微创手术。例如内镜粘膜下剥离术(ESD),在传统ESD 手术中,存在单器械操作,手术耗时长,易出现并发症,如穿孔等现象;同时,传统手术对医师技术要求高,限制了ESD 手术在基层医疗中的推广。随着主从机器人与内窥镜结合,新的内镜机器人平台的出现给微创外科手术带来了无限的可能。如今很多复杂的外科手术都可以通过内镜机器人完成,而且较人精准度更高,执行力更强,术后潜在性并发症大大减少,相关医生也可以大大减少需要学习的时间,就能完成相对复杂的手术。
然而,内镜机器人要想成功获得广泛的临床应用,补充甚至取代现有的金标准内窥镜平台,必须实现三个重要的里程碑式的目标——展示该设备的临床安全性和成本效益,广泛提供定向培训机会以提高主刀医生的技术和临床决策能力,持续识别超出设备当前用途的新临床应用[5]。
目前主流治疗型内镜机器人系统有美国汉森医疗公司的Viacath 系统[6]、日本Keiichiro 团队研发的ETRS 系统[7]、韩国Kim 团队研发的REXTER 机器人系统[8]、新加坡南洋理工大学Thant 团队的Endo-Master 系统[9]、Donno 等人的STRAS 系统[10]、Tsutomu 等的RAFE 系统[11]。本综述主要就治疗性内镜机器人的手术模式划分为多端口内镜手术机器人、单端口内镜手术机器人和经人体自然腔道的内镜手术机器人,分别介绍这几类手术机器人的操作使用、独特优势以及需要克服的技术难点。
1 多端口内镜手术机器人
多端口内镜机器人手术是标准腹腔镜手术高级拓展延伸的具体体现。标准的腹腔镜手术是采用多个较小的切口代替传统开一个大切口的外科手术的方式,通过多个较小切口,将腹腔镜以及各种器械刀深入患者体内来进行手术。
标准腹腔镜手术相对于传统开腹手术的优势已经得到了充分的证明,用较小的腹腔镜端口代替大的腹部切口降低了病患发病率、切口疝的形成、住院时间、术后疼痛和恢复期。然而标准腹腔镜手术仍然存在许多不足的地方,它需要医生站在病床旁手持器械刀,医生容易疲劳,手臂容易颤抖,器械灵活度不够高,内镜成像会有局限性。机器人的出现就很好地解决了这些难点。
目前在机器人手术商用领域,占主导地位的仍然是达芬奇的多端口内镜机器人系统。使用该系统时,外科医生坐在远程控制手术台前,而机器人的多个手臂则位于手术台上患者的上方。这样大大降低了外科医生的疲惫感,而且手术能够更加精准,有效缩短手术时间。
多端口手术方法需要多个切口将各种腹腔镜器械插入患者的体内,相对于单点手术和经自然腔道手术方法而言,毫无疑问侵入性更多,不太美观,但是在手术过程中,该手术方法取出和重新插入器械更为简单快速。多端口机器人系统大部分采用的是外部驱动电机,因为机械臂不占用患者体内任何空间,所以多端口机器人系统的机械臂不需要过分追求尺寸的问题,而且多端口手术模式相对于其他两种手术模式应用更为广泛,能够解决的病例更多。然而,该系统模式需要克服的技术难点较多,如需要患者重新定位、机械臂碰撞、三角测量困难等问题[12]。
da Vinci Xi 是其公司2014 年推出的达芬奇第四代手术平台,如图1 所示,它具有四条机械臂, 可实现更轻松的对接、更广泛的运动,加上改进的人体工程学设计,可以实现多象限手术[13],从复杂的多象限结肠切除术到具有挑战性的骨盆直肠系膜解剖,它都可以胜任。该手术系统解决了达芬奇前几代产品的局限性,无需重新对接机器,避免了机械臂一些不必要的碰撞。
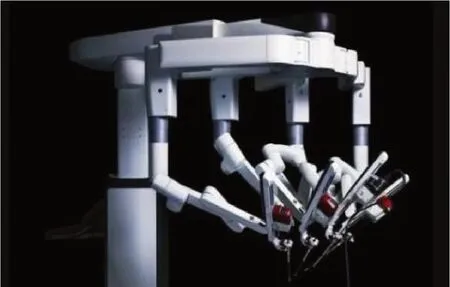
图1 da Vinci Xi 手术机器人
2 单端口手术的内镜机器人
机器人微创手术时代开启以来,限制切口的数量和大小继而减少外科手术的侵入性等话题获得人们的广泛关注。单端口手术就是通过单个切口部署接入端口,其应用最广泛的是通过单个端口将一个视觉单元和两个操纵臂插入患者体内,分别用于可视化和手术操作。
这种单端口手术方法的侵入性水平取决于机器人端口直径大小,直径的大小又会影响机械臂的性能。首先,较小端口会要求机器人的机械臂电子部件必须做的足够小;其次,具有较小直径的端口会限制机械臂的灵巧性和有效负载能力;而且,由于端口直径尺寸被限制,单孔内镜机器人机械臂的自由度、灵巧性也会受到影响。随着端口直径尺寸的减小,缺乏最佳三角测量,减少了视轴、视野,那么外科医生的工作、人体工程学的显著损害等都成为需要考虑的因素。因此,在保证单孔内镜机器人性能提高的同时又能减小端口直径尺寸大小一直是科技人员需要解决的技术难点。
随着单端口手术的广泛应用,单孔内镜机器人在不断创新,并且在最近五年有了较大的突破,很多改进的单孔机器系统被提出。其中,有允许机械臂顺序插入的系统,该系统端口只需容纳一个而不是多个相邻的仪器[12],因此灵活性被显著提高;有作为新型 3-PU 并联机构的一部分,机械手的设计采用了超弹性 Ni-Ti 棒的系统,与蛇形连续体机器人相比,作业半径缩短,动作更加灵巧[14];还有很多创新型单端口机器人系统,在这里不一一阐述。
单端口手术机器人显著的优点,除了外观漂亮以外,就是可以将机械臂深入狭窄复杂的身体组织里面,可以为复杂的手术提供微创操作。2014 年,单孔手术机器人达芬奇sp 系统,如图2 所示,进入临床应用,2018 年5 月,美国FDA 批准了达芬奇SP 手术系统(单端口手术)适用的第一类手术:泌尿外科手术。该系统包括3 个多关节的、可以扭动的“机械手腕”和1 个灵活的3D 高清摄像头。

图2 da Vinci sp 手术机器人
3 经自然孔径手术的内镜机器人
自然孔径手术,顾名思义,就是通过人体自然孔口(如喉咙、鼻腔、直肠);引入长而弯曲且灵活的多通道内窥镜进入手术部位。和单端口手术机器人一样,经自然孔经手术的内镜机器人通常具有1 个视觉单元和2 个操作臂,实施手术不会留下疤痕,病 人住院时间短,术后并发症降低。这类手术机器人由于受到人体结构影响,不能进行复杂度较高的手术,通常是进行一些简单的手术,相对于本文上面的两种机器人,用于经自然孔径手术的机器人能够处理的病例相对较少、较简单。 由于经自然孔径做手术的内镜机器人,需要经过人体狭窄弯曲的的通道,且手术空间有限,所以机器人的内镜臂外径受到严格控制,自由度也受到限制,但是这类手术机器人对内镜臂的自由度、远端灵活性和有效负载能力要求比较高[13],所以怎样使内镜臂的直径最小化并且最大化操纵臂的性能,一直是这类机器人设计的挑战。为了满足手术需要,本研究团队一般都会把内镜臂设计得足够长,类似于蛇形结构但倾向于软性结构。
新加坡南洋理工大学团队研制的EndoMaster 系统,[15]是一款典型的用于经自然孔径手术的内镜机器人,最初设计用于胃肠道息肉和肿瘤的内镜切除。它使用的是柔性内窥镜,在柔性内窥镜的最末端集合了两个机械臂,如图3所示,一个是握抓器,一个是探头[16]。她的两个机械臂允许9°运动和三角测量,使其能够对患者病灶处进行精细操作。

图3 Endomaster 柔性机械臂系统
4 讨论与展望
在当今内镜机器人被各界热切关注的同时,必须认识到目前研究现状及存在的一些问题。
例如,对于结构简单、控制方便且灵活的内窥镜系统,存在系统发热问题。由于人体肠道内的温度较高且不能承受太高的温度,形状记忆合金的变形与回复温差必须较小,因而形状记忆合金驱动的速度较慢。再如单孔内镜机器人外径不可能太小,而且靠扩张方式行走会引起患者的不适甚至痛苦。采用何种内镜机器人,如何实现手术精确定位,是内窥镜系统研究的重点和难点。
总得看来,研究难点主要集中在:生物医用材料的发展和医学科学技术的发展对医疗机器人行业将形成倒逼,不确定性和机会并存,需要研究适合在内腔中运动的驱动机理,需要设计不会造成组织损伤的结构(材料、尺寸、重量等),以及实现微系统的可操作性,并且需要解决系统发热问题。再者,治疗性内镜机器人的研究开发,涉及通信、材料、传感器、生物医学、计算机、图像处理等众多领域的技术,技术难度高、资金投入多、需要多学科支持。
诚然,我们仍然坚信,内镜机器人将会越来越普及,在医疗领域中的作用越来越大。