基于Mworks的坦克随动系统建模与仿真研究
2021-03-29袁树森邓文翔姚建勇杨国来
袁树森,邓文翔,2,姚建勇,杨国来
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州 310027)
为了适应当前战争的需求,高质量、高稳定性、高精确性的坦克炮在我国军事体系中占据着不可替代的作用。坦克随动系统是整个坦克炮的关键组成部分,主要用于实现坦克炮方位和俯仰姿态调转及随动跟踪,同时在坦克行进状态中,随动系统也是保证在坦克行进间炮塔和坦克炮稳定的关键因素。
近年来,关于坦克随动系统建模与仿真分析的研究水平不断提高。文献[1]在建立坦克火炮系统动力学模型的基础上,对扰动力矩的作用机理和影响因素等方面进行深入分析,建立了火炮扰动力矩谱测试系统,并通过实车试验对所建系统的有效性进行了相关验证。文献[2]论述了火炮随动伺服控制系统响应频率参数对随动伺服控制系统设计的重要意义,并通过实例给出了伺服控制系统响应频率的相关公式及详细计算方法。文献[3]在继承和分析传统炮控系统的基础上,对坦克高低向和水平向炮控系统进行了对比和统一,简化了炮控系统处理的对象,建立了饱和炮控系统的数学模型,对炮控系统中的摩擦、干扰、噪声等因素进行了分析和仿真,设计出了基于Kalman滤波器的PID炮控系统。文献[4]从坦克炮控系统的结构入手,分析了系统内部各种非线性因素,建立了包含各种非线性因素的炮控系统数学模型,分析了系统的性能要求,开展了炮控系统的稳定状态性能分析。文献[5]指出了现装备坦克炮控系统存在的主要问题,介绍了交流全电坦克炮控系统的总体方案,分析了交流全电炮控系统对提高坦克火控系统射击精度,缩短系统反应时间等的重大影响。文献[6]在设计中建立了自行高炮随动系统的动态数学模型,采用频率特性法与Matlab仿真设计手段相结合的方法,设计了系统校正环节,使系统具备很好的跟踪精度和快速反应能力,并具有较强的鲁棒性。文献[7]基于多体动力学的刚柔耦合及接触碰撞算法,建立了考虑多个结构非线性因素的坦克行进间刚柔耦合多体系统动力学模型。结合优化设计理论和方法,建立了坦克行进间射击炮口振动优化模型。文献[8]首次采用Denavit-Hartenberg方法建立了炮控系统的连体坐标系,采用近似线性化方法对炮塔-火炮轴间耦合非线性系统进行线性处理,并通过经典的PD控制方法对系统的稳定性能进行验证。文献[9]针对坦克炮塔-火炮系统提出火力线任务空间控制方法,有效解决炮塔-火炮轴间耦合PD控制策略存在的问题,通过仿真分析,验证了所提方法的有效性。
本文基于Mworks软件平台,建立了包括坦克随动系统的轴间耦合负载非线性动力学模型、方位子系统驱动端动力学模型和俯仰子系统驱动端动力学模型的坦克随动系统综合动力学模型。同时针对坦克随动系统非线性机理复杂、形式多样的特点,考虑了坦克随动系统两轴耦合间结构柔性非线性、执行机构摩擦非线性、机构连接间隙非线性等多个非线性因素的影响,设计了坦克随动系统轴间耦合PID控制器,对坦克随动系统的动态特性和综合性能进行分析优化。仿真分析结果表明了所设计的控制器参数能使系统的动态响应、稳态精度达到一定的要求,符合坦克随动系统的实际工作指标,验证了本文坦克随动系统建模的准确性和有效性。
1 Mworks介绍
随着机电产品日趋复杂,传统的单领域建模仿真工具被逐渐淘汰。工业生产中对现代复杂工程系统整体性能分析不断深入与优化,各领域子系统的简单集成已无法满足多领域耦合系统的设计理念。MWorks基于Modelica语言,是新一代多领域物理系统建模、仿真、分析与优化的通用CAE平台[10]。Modelica语言继承了先前多种领域建模语言的优点,融合了Java语言的面向对象机制与Matlab的数组表达机制。
Mworks软件的主要特点如下:①Mworks集多工程领域的系统建模与仿真一体化,多工程领域子模型可以在同一个模型中相互融合、相互作用;②系统采用内置DAE求解器进行求解运算;③在图形化建模方面,每段仿真过程均可由3D动画以及变化曲线呈现,可自由实现动画控制与视图操作相互切换;④MWorks可以与其他通用软件兼容,计算效率高[11]。
2 坦克随动系统非线性建模
坦克随动系统在坦克行进间射击的主要作用体现在以下两方面:坦克行进间坦克炮身管的角度瞄准;角度瞄准后使坦克炮保持稳定状态,以提高首发命中率。坦克炮管在坦克行进射击过程中的运动分为水平方向和高低方向。坦克随动系统模型如图1所示。

图1 坦克随动系统模型
将坦克随动系统水平方向的控制系统称为方位子系统,方位子系统主要控制坦克炮塔的角度跟踪;将坦克随动系统高低方向的控制系统称为俯仰子系统,俯仰子系统主要控制坦克炮管的角度跟踪。坦克随动系统控制器根据火控系统提供的目标指令,分别获取打击目标水平方向的位移信息和高低方向的位移信息,以控制方位子系统坦克炮塔水平方向的运动和俯仰子系统坦克炮高低方向的运动。
2.1 坦克随动系统轴间耦合负载非线性动力学数学模型
考虑到坦克整车系统建模和控制的复杂性,基于文献[12],坦克随动系统方位子系统和俯仰子系统两轴耦合系统简图如图2所示,坦克随动系统的两轴耦合结构特性与其行进射击过程中的方位向运动特征和高低向运动特征均通过图2描述,图中,O0x0y0z0为坦克车体惯性坐标系,O1x1y1z1为坦克炮塔连体坐标系,O2x2y2z2为坦克炮连体坐标系,O3x3y3z3为坦克炮口坐标系。以坦克车体作为坦克随动系统的发射平台,用俯仰子系统中坦克炮身管和方位子系统中坦克炮塔的角度变化描述坦克炮身管在坦克随动系统工作空间下的位置指向。

图2 坦克随动系统两轴耦合系统简图
文献[13]根据传统的机器人建模技术,推导出坦克随动系统的动力学模型。为简化动力学分析,坦克随动系统实际只有2个运动副,即坦克炮管是固定长度的连杆,这与两连杆机械臂的模型十分相似。基于此,可根据拉格朗日动力学方程建立完整的坦克随动系统的动态模型。为使建模推导过程简明清晰,坦克随动系统中的坦克炮塔(方位子系统)以部件1指代,坦克炮(俯仰子系统)以部件2指代,定义符号下标j=1,2,分别指代坦克炮塔和坦克炮部分相关参量。
定义Γj为部件j关于连体坐标系Ojxjyjzj的3×3惯性张量矩阵:
(1)
式中:Ixxj,Iyyj,Izzj分别为部件j关于x轴、y轴、z轴的转动惯量;Ixyj,Ixzj,Iyxj,Iyzj,Izxj,Izyj为部件j的惯性积。

(2)
式中:W为坦克随动系统的广义质量矩阵,为2×2正定对称矩阵,其表达式为
(3)
将式(3)代入如下拉格朗日动力学方程,并假设不计部件运动时摩擦产生的影响,则有:
(4)
(5)
基于式(5),定义2×2矩阵:
(6)
因此可知:
(7)
将式(6)和式(7)代入式(5),可进一步简化坦克随动系统动力学方程:
(8)
将坦克随动系统方位子系统和俯仰子系统相关质量和几何参数展开,则
(9)

坦克随动系统的动力学模型建立如下:
(10)
2.2 方位子系统驱动端数学模型
坦克方位子系统主要控制炮塔水平方向的运动,采用电机作为动力源,电机经过减速箱直接驱动炮塔齿圏,齿圈与炮塔连接,齿圈运动带动炮塔旋转,保证了坦克方位子系统水平方向的运动。
方位子系统主要由功率变换器、炮塔电机、电流传感器、方向机、水平向巧螺仪和水平向控制器等部分组成[15]。
考虑方位子系统驱动端摩擦特性及未建模的扰动,方位向的负载端力矩平衡方程可写为
(11)

由于坦克方位子系统采用伺服电机经减速器的形式进行传动,不可避免地存在传动间隙与结构柔性的问题,因此方位子系统力矩平衡方程为
Mm1=G1[φ(qm1/n1)-q1]
(12)
式中:φ(qm1/n1)为描述传动间隙的函数,n1为方位子系统电机的减速比;G1为传动轴的刚度系数;qm1为方位子系统电机端输出的角度。
由于摩擦特性对方位子系统的低速性能影响较大,为更加精确地描述真实的摩擦行为,采用如下的连续非线性摩擦模型:
(13)

方位子系统伺服电机电压平衡方程:
(14)
方位子系统伺服电机转子力矩平衡方程:
(15)



图3 基于驱动器速度闭环的方位子系统驱动端模型
图3中Gpp1(s)为位置控制器,Gpv1(s)为速度控制器,Gpc1(s)为电流控制器,ki1为力矩系数,ke1为反电势系数,n1为减速器速比,bp1为速度环稳态增益。
2.3 俯仰子系统驱动端数学模型
坦克俯仰子系统主要控制坦克炮高低方向的运动,俯仰子系统主要由功率变换器、伺服电机、滚珠丝杠、电流传感器、高低向巧螺仪和高低向控制器等部分组成[15]。
俯仰子系统运动学示意简图如图4所示,图中,O为坦克炮耳轴,O1为电动缸下支点,O2为电动缸上支点;D1为坦克炮耳轴到电动缸下支点的垂直距离,D2为坦克炮耳轴到电动缸下支点的水平距离,D3为火炮耳轴到电动缸上支点的距离,D4为坦克炮耳轴到身管质心的距离;xp0为电动缸初始的长度,xp1为电动缸调整炮角后的长度(即点O1与点O21之间的长度),Δx为电动缸活塞推杆位移。俯仰系统在建模上与方位子系统不同之处在于电动缸的建模。由于电动缸具有响应快、传动效率高、易于维护、寿命长等特点,电动缸作为动力源成为我国全电式坦克的一个很重要的组成部分。电动缸内部采用齿轮减速器、滚珠丝杠进行传动,将直线运动转换为坦克炮身管的旋转运动。

图4 坦克俯仰子系统运动学示意简图
考虑俯仰子系统驱动端摩擦特性及未建模的扰动,俯仰子系统高低向的负载端力矩平衡方程可写为
(16)
式中:M2为坦克俯仰子系统负载端的驱动力矩,F为电动缸输出推力,qa为电动缸出杆力和身管轴线的夹角,q2为坦克炮的俯仰角,m2为方位子系统坦克炮身管的质量,d2(t)为俯仰子系统中未建模的扰动,俯仰子系统的摩擦力矩为
(17)
由图4,根据三角函数关系分析可知:
与方位子系统类似,俯仰子系统伺服电机电压平衡方程为
(18)
俯仰子系统伺服电机转子力矩平衡方程:
(19)
坦克俯仰系统亦存在传动间隙与结构柔性的问题,因此,
Mm2=G2[φ(qm2/n2)-q2]
(20)
式中:Mm2为考虑传动轴柔性后,俯仰子系统电机传动轴末端的力矩。
由文献[16]可知,滚珠丝杆的输出推力与转矩的关系式为
(21)
式中:l为滚珠丝杠导长,η为丝杠机械效率。


图5 基于驱动器速度闭环的俯仰子系统驱动端模型
3 基于Mworks的系统建模及仿真
3.1 坦克随动系统轴间耦合负载非线性动力学建模
根据式(10),基于Mworks建立坦克随动系统轴间耦合负载非线性动力学模型,如图6所示。控制输入U1,U2,对应建立的坦克随动系统轴间耦合负载非线性动力学模型中的驱动力矩M1和M2。

图6 基于Mworks坦克随动系统轴间耦合负载非线性动力学模型
3.2 方位子系统驱动端建模
根据方位子系统伺服电机电压平衡方程和方位子系统伺服电机转子力矩平衡方程,基于Mworks建立方位子系统驱动端模型,如图7所示。
方位子系统驱动端模型以驱动器驱动伺服电机的形式完成伺服控制功能,驱动器内部配置在速度环,U11为方位指令输入端,Mt1为输入到坦克方位子系统负载端的驱动力矩,U12为动力学模型位置输出端反馈信号。
3.3 俯仰子系统驱动端建模
俯仰子系统驱动端建立的模型与方位子系统区别在于俯仰子系统以电机驱动滚珠丝杠的伸缩,将滚珠丝杠的直线运动转换成俯仰子系统高低向的旋转运动,存在较强的非线性特性。根据俯仰子系统驱动端数学模型,建立如图8所示俯仰子系统驱动端模型输入与输出接口。

图7 基于Mworksr的方位子系统驱动端模型

图8 基于Mworks的俯仰子系统驱动端模型
3.4 坦克随动系统仿真分析
为验证本文基于Mworks建立的坦克随动系统动态性能的准确性和稳定性,将基于Mworks建立的坦克随动系统轴间耦合负载非线性动力学模块、方位子系统驱动端模块、俯仰子系统驱动端模块进行封装组合,形成坦克随动系统模型库,并基于Mworks设计了方位子系统和俯仰子系统轴间耦合PID控制器。基于Mworks的坦克随动系统仿真模型如图9所示。

图9 基于Mworks的坦克随动系统仿真模型
坦克随动系统轴间耦合负载非线性动力学模型部分参数[16]如下:Ixx2=5 400 kg·m2,Iyy1=2 547 kg·m2,Iyy2=5 343 kg·m2,Izz2=224 kg·m2,Ixy2=-2.8 kg·m2,Iyz2=13.7 kg·m2,Izx2=0.8 kg·m2,h1=0.6 m,h3=5 m。方位子系统驱动端模型部分参数如下:Lm1=0.05 H,Rm1=2.6 Ω,ku1=1.11 N·m/A,Jm1=1.16×10-4kg·m2,Ge1=5×106N/m,n1=200,ke1=0.64 V·s/rad;俯仰子系统驱动端模型部分参数如下:Lm2=0.010 7 H,Rm2=1.93 Ω,ku2=0.55 N·m/A,Jm2=6.04×10-4kg·m2,n2=550,ke2=0.5 V·s/rad,Ge2=5×106N/m,D1=0.5 m,D2=2.8 m,D3=1.2 m,D4=4.5 m,l=0.025 m,m2=200 kg,η=0.85。
瞄准目标时坦克随动系统的方位角度指令信号为
俯仰角度指令信号为
式中:坦克炮炮口圆轨迹半径r=1 m,坦克炮炮口圆轨迹与水平面夹角ξ=arctan(R/h3),仿真中采样周期设置为0.001 s。
基于Mworks设计了方位子系统和俯仰子系统轴间耦合PID控制器:方位子系统控制器参数KP=90 000,KI=300,KD=0;俯仰子系统控制器参数KP=60 000,KI=100,KD=0。
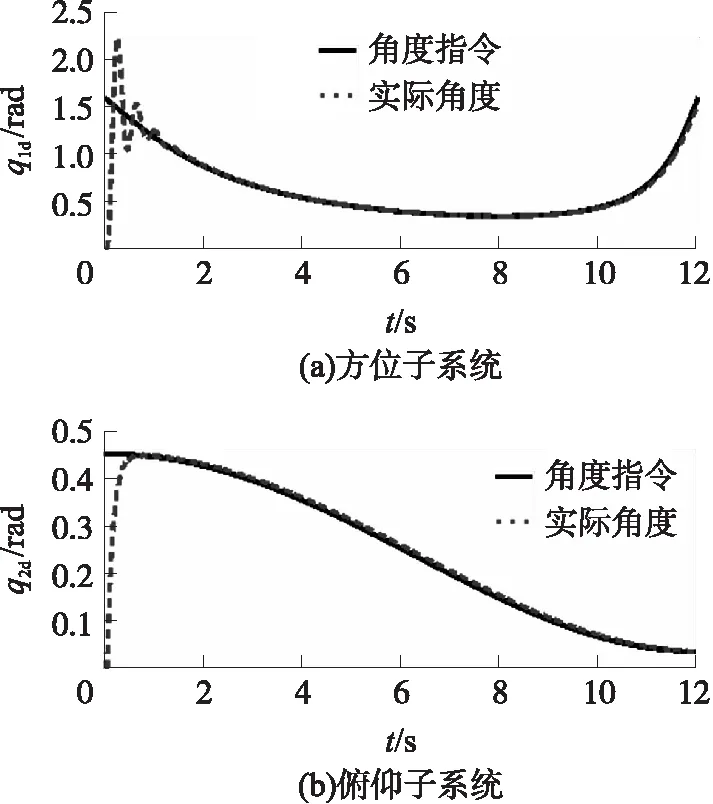
图10 工况1实际角度对角度指令的跟踪过程

图11 工况1跟踪误差
分析图10、图11可知,PID控制器作用下系统的跟踪精度较高。方位子系统在1.2 s内可以实现稳定跟踪,6 s时方位子系统跟踪误差约为2.06×10-3rad;俯仰子系统在0.8 s内可以实现稳定跟踪,6 s时俯仰子系统跟踪误差约为6.56×10-3rad。
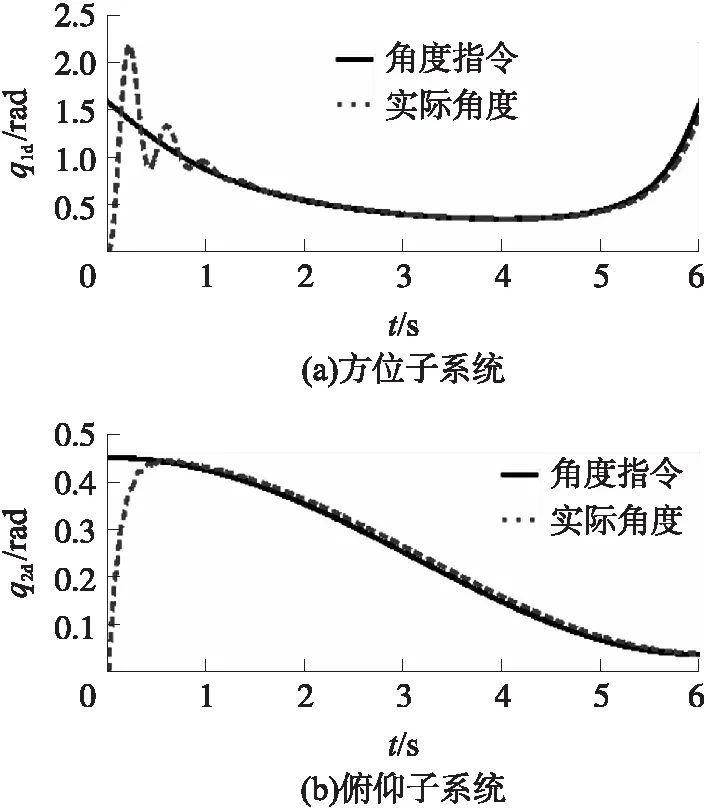
图12 工况2实际角度对角度指令的跟踪过程
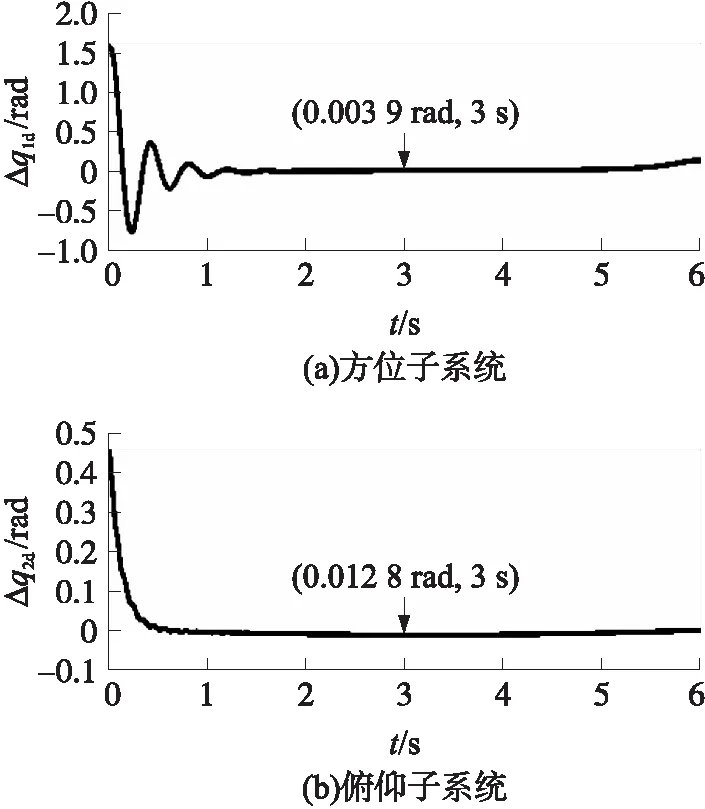
图13 工况2跟踪误差
不同工况下的仿真验证结果表明,坦克随动系统方位子系统和俯仰子系统的跟踪误差都保持在约束范围内,都能在较快的时间内跟踪给定的角度指令,验证了基于仿真平台MWorks建立的坦克随动系统轴间耦合非线性模型的正确性和有效性。
4 结束语
本文基于Mworks软件平台,建立了包括坦克随动系统的轴间耦合负载非线性动力学模型、方位子系统驱动端动力学模型、俯仰子系统驱动端动力学模型的坦克随动系统综合动力学模型。与传统的建模方法相比,本文建模环节综合考虑坦克随动系统两轴耦合间结构柔性非线性、执行机构摩擦非线性、机构连接间隙非线性等非线性因素的影响,准确反映了坦克随动系统非线性模型的动态特性。
基于Mworks设计了坦克随动系统轴间耦合PID控制器,保证了PID控制器作用下坦克随动系统方位子系统和俯仰子系统动态性能的稳定性,验证了坦克随动系统综合动力学模型建模的准确性和有效性。通过对不同工况下仿真结果的分析可知,高频率运动状态下,坦克随动系统的稳定精度会有一定下降;方位子系统和俯仰子系统在控制器的作用下都能够快速获得稳态精度。
