空间机器人抓捕目标后的载荷分配
2021-03-28周逸群罗建军王明明
周逸群,罗建军,王明明,*
1. 西北工业大学 深圳研究院,深圳 518057 2. 西北工业大学 航天动力学国家重点实验室,西安 710072
随着航天技术的发展,人们未来需要在太空中进行更多复杂的舱外任务。与航天员相比,空间机器人在执行在轨任务方面具有诸多优势。自20世纪80年代以来,空间机器人已被用于大型航天器上的许多航天任务,并成为实现在轨服务任务最重要的途径之一。典型实例有“工程试验卫星7号(Engineering Test Satellite VII, ETS-VII)”[1]、“轨道快车(Orbit Express, OE)”[2]、“凤凰计划(Phoenix)”[3]、“德国轨道服务任务(Deutsche Orbitale Servicing Mission, DEOS)”[4]等。由单臂到多臂、由遥操作到自主、由合作目标到非合作目标是空间机器人技术发展的主要趋势[5]。
与单臂机器人相比,多臂机器人所能处理的载荷更多,灵活性也更高。但与此同时,多臂协调操作的复杂性也更大。为操作所抓捕的目标,机器人需要对目标施加适当的外力,以实现目标的期望运动。由于多臂操作的冗余性,各机械臂所施加的外力组合是不唯一的。因此可以按照一定指标,将目标的期望合外力合理地分配到各机械臂。机械臂施加力可分为操作力和内力两部分,前者驱动目标运动,后者对目标运动没有影响。Alberts和Soloway[6]将载荷分配转化为线性约束二次优化问题,并提出权重因子以平衡分配末端力,在载荷分配问题中引入了权重广义逆。Walker等[7]提出了一种避免操作力在目标内部产生挤压,从而消除内力的载荷分配方案,并指出这种抓取矩阵广义逆是惟一的。Bonitz和Hsia[8]将这种方法应用于相互作用力的分析,以实现操作力和内力的解耦。但Chung等[9]对这一结果提出了质疑,认为使用Moore-Penrose逆作为权重广义逆才可以消除内力。Kumar和Waldron[10]则将内力定义为任意2个机械臂末端施加力在它们几何连线上的投影之差,但没能将这一概念扩展至内力矩。Yoshikawa和Nagai[11]提出了一种几何启发式的内力定义,试图解决使用广义逆不一致的问题。Williams和Khatib[12]提出内力的另一种表征,其中机械臂的组合近似为铰接机制,内力被解释为锁定这一机制所需的驱动力,但没有考虑末端力对产生的扭矩的影响。Erhart和Hirche[13]提出了一种新定义,认为内力的产生是由于对运动约束的违反,并指出无挤压的载荷分配是不唯一的,这为选择合适的载荷分配方案提供了额外的自由度。
除多臂协调操作外,载荷分配在多指手抓取中也发挥着重要作用。在上述研究中,机械臂末端与目标表面通常设定为固联形式,但在实际中更类似于多指手抓取物体,机械臂末端的运动与目标上的抓捕点并非完全相符,施加于目标的接触力必须符合接触点处的摩擦约束,这就要求合理地规划抓捕点布局和各臂所施加的抓捕力,以保持抓取稳定并实现期望的目标运动。抓取力的优化可以描述为非线性规划问题,即按照所设的目标函数,寻找既能平衡目标所受外力又能满足接触点处的摩擦锥约束条件的最优接触力。Nakamura等[14]用Lagrange乘子法进行抓取力的非线性规划,将摩擦锥作为非线性约束条件,摩擦力的最小范数作为优化目标。由于摩擦锥约束的高度非线性,这一问题的求解计算量往往很大,为此人们通常利用其特殊的几何特性将约束线性化。Buss等[15]将非线性的摩擦约束条件替换为一个对称矩阵的正定性判定条件,从而将优化问题转换成具有线性约束的黎曼流形的最优化问题。王滨[16]和Borgstrom[17]等分别利用Lagrange乘子法和惩罚函数法调节法向接触力的权值,以使抓取力满足摩擦锥约束,并通过梯度流算法优化抓取力。Cornellà等[18]提出了一种基于对偶原理的非线性规划方法。陈栋金等[19]将任意外力分解为单位力的线性组合,对基础抓取力按同样规律组合,得到满足约束的抓取力初值。陈金宝等[20]提出了基于序列二次规划算法的fmincon函数,并采用关节阻抗控制算法控制各指接触力,能够快速进行抓取力非线性规划。王新庆等[21]将外力分为12个单位力向量的线性组合,先离线计算得到力优化问题的初值,再结合半正定规划算法进行动态力优化。Kerr和Roth[22]最早提出用棱锥代替摩擦锥,将非线性的摩擦锥约束转化为接触力基向量的线性组合约束,提出抓取力优化的线性规划算法。Sinha[23]和Barkat[24]等采用二次规划算法计算满足非线性摩擦约束的最小接触力。Jia等[25]建立了一种基于关键约束集的实时有效算法,直接优化关节力矩,便于灵巧手的控制。Cloutier和Yang[26]对抓取力优化的线性法、非线性法和线性矩阵不等式法进行了比较研究。总体来说,抓取力规划的非线性规划方法的计算结果比较准确,但计算量大,通常是离线进行的。线性规划方法的计算量较小,但由于对摩擦模型进行了近似处理,所得结果较为保守。
现有的有关载荷分配的研究大都针对地面机械臂或多指手,在空间机器人领域尚未得到应用。已有的研究大多仅考虑目标的几何特性,没有考虑机械臂所能施加的接触力等限制条件。抓取的对象多为静止物体,难以适用于多臂操作目标运动的情况。本文旨在提出一种综合考虑目标与机械臂特性,应用于多臂空间机器人抓捕目标后的载荷分配方法。在给定目标期望运动的条件下,计算各臂满足摩擦约束和机械臂能力约束的最小抓捕力。为降低计算量,采用线性规划方法,将软指接触模型线性化。根据目标与机器人的动力学特性和运动约束,建立关节扭矩约束。将求解最优接触力的非线性规划问题转化为线性规划问题。
本文组织如下:第1节介绍抓捕后阶段空间机器人及目标组合体的动力学。第2节建立软指接触条件下的摩擦力约束及运动约束。第3节将摩擦锥约束线性化,并推导组合体中关节扭矩约束的形式,建立载荷分配的线性规划方法。第4节展示对于目标各种形式的期望运动,所提接触力优化方法的有效性。第5节给出结论。
1 动力学模型
1.1 空间机器人动力学
在抓捕后阶段,空间机器人与目标构成一个组合体。如图1所示,双臂空间机器人系统由基座和2条n自由度的机械臂组成,共包含2n+1个刚体。
表1给出了空间机器人系统中运动学和动力学符号的含义。在本文中,如无特别说明,所有参数都表示在与之固联的刚体坐标系中。En和0n分别表示n×n的单位矩阵和零矩阵。参数的上标a或b分别表示与臂a或臂b相关的项。下标b、m、e、t分别表示与基座、机械臂、末端执行器或目标相关的项。上标l(l=a,b)为接触点编号,下标i(i=1,2,…,n)为连杆编号。

表1 本文所用运动学和动力学符号Table 1 Kinematic and dynamic symbols used in this paper
根据Lagrange力学,空间机器人动力学方程表示为[27]
(1)
或简写为
(2)

对于自由漂浮空间机器人,fb=0,动力学方程可以改写为
(3)

(4)
1.2 目标动力学
目标的动力学方程表示为[27]
(5)

(6)
×为3维叉乘因子,其具体形式为

(7)
(8)

2 机械臂与目标的接触模型
在实际情况下,机械臂与所抓捕目标之间往往并非固联,而是类似于多指手抓取的形式。这种情况下,机械臂末端与目标的运动并不完全一致,指尖只能在某些方向上对目标施加力和力矩,接触力受到摩擦约束的限制。指尖和物体有3种基本的接触形式:无摩擦点接触(Frictionless Point Contact, FPC)、有摩擦点接触(Point Contact with Friction, PCwF)和软指接触(Soft-Finger Contact, SFC[25])。其中,软指接触最接近实际情况。令接触点l(l=a,b)坐标系的z轴沿目标表面法向并指向其内部,x轴和y轴组成的平面垂直于目标表面法向。
(9)
此时接触力的方向局限于接触点的法向轴线,并指向目标内部。
(10)
由式(10)表示的法向压力与切向摩擦力的约束在几何上可以表示为一个顶点位于接触点,以法向压力为轴的圆锥,称为摩擦锥。
(11)
或
(12)
式(11)和式(12)分别称为软指接触的线性模型和椭球模型。在法向压力固定的情况下,切向摩擦力和摩擦力矩在几何上可分别表示为一个3维双锥体和3维椭球体。
图2展示了三类接触模型。

在软指接触的情形下,机械臂末端施加于目标的6维力螺旋为
(13)

(14)
和
(15)

(16)
3 抓捕力优化问题
3.1 优化问题
多臂抓捕目标的载荷分配问题可以表述为一个多约束优化问题。机械臂末端与目标间为软指接触形式。为避免接触力过大损坏目标,这里设定各抓捕点的法向压力之和最小化作为优化目标。约束条件包括式(5)所代表的动力学约束、式(11) 或式(12)所代表的摩擦约束,以及由关节扭矩上限所决定的机械臂能力约束等。具体形式为
(17)
为减少计算量,下面将摩擦约束线性化,并建立 机械臂能力约束形式。
3.2 摩擦约束的线性化
由于摩擦锥约束的非线性,在抓捕力规划问题中直接运用起来比较困难。此时可以通过线性化方法,将其转化为线性约束。
(18)

(19)
或
(20)
式中:nl=2JK-J+2;Sl∈R4×nl为接触力基向量的并列形式;λl∈Rnl为其系数向量。各抓捕点接触力的并列可表示为
(21)
式中:S=diag(Sa,Sb);λ=[(λa)T,(λb)T]T为其系数向量。
将接触力转换到目标坐标系,得到:
(22)

(23)
式中:W=[Wa,Wb]∈R6×(na+nb)为所有接触点原始力螺旋组成的矩阵。

3.3 机械臂能力约束
在空间机器人运动过程中,关节扭矩既要为末端抓捕目标提供期望的接触力,又要驱动机器人的运动。因此,机械臂能力约束同时受到机器人和目标的运动学和动力学因素的影响。
对式(16)两边求导,可得机械臂与目标间的加速度级运动约束:
(24)
由式(14)和式(15)分别可得
(25)
(26)
将式(25)和式(26)代入式(24),得到
(27)
忽略与速度相关的偏差项,可得:
(28)
将式(28)代入式(3),得
(29)

(30)
经过以上处理,优化问题式(17)可以改写为
(31)
通过对摩擦约束和机械臂能力约束的处理,原接触力非线性规划问题转化为原始力螺旋系数的线性规划问题。
3.4 优化算法
如式(31)所示,载荷分配问题可转化为一个包含等式约束和不等式约束的线性规划问题。本文采用原始-对偶内点法[28]解决该优化问题。
对于线性规划问题的标准形式:
(32)
式中:A和b分别为不等式约束系数;Aeq和beq分别为等式约束系数;l和u分别为优化对象的下、上边界。引入松弛变量s和t,将不等式约束转化为等式约束:
(33)
式中:
(34)
初始值x0设为下边界值。设Lagrange乘子分别为y、v、w,得到Lagrange方程:
(35)
系统的KTT条件为
(36)
算法首先根据Newton-Raphson公式预测一步,然后计算校正步。Newton-Raphson步骤为
(37)
式中:X、V、W、T分别为对应x、v、w、t的对角矩阵,最右项为剩余向量。式(37)可转化为对称矩阵形式:
(38)
式中:
(39)
式(38)经转换可得到:
(40)
求解该方程得到Δy后,代入式(37)和式(38)即可得到剩余迭代向量,通过逐步迭代得到目标函数变量的收敛值。
4 仿真验证
4.1 仿真模型
为了验证所提载荷分配方法的实用性,本节给出采用冗余双臂空间机器人抓捕目标的仿真实例。空间机器人模型如图1所示,两臂各有7个自由度,基座有6个自由度。空间机器人的运动学和动力学参数如表2所示,其中ai、bi和Ii均表示在其本体坐标系中。

表2 空间机器人的运动学与动力学参数Table 2 Kinematic and dynamic parameters of space robot
所抓捕的目标的质量mt=40 kg,转动惯量It=diag(16.80,24.36,25.68) kg·m2,2个抓捕点的位置为rg=[0,±1.006,0]Tm。以上参数均表示在目标坐标系中。
两机械臂末端与目标间的摩擦力系数和摩擦力矩系数分别为μ=0.3,γ=0.4。线性化摩擦锥参数为J=20,K=1。关节扭矩幅值τmax=20。
数值仿真的基本步骤如下:
步骤1根据式(18)~式(23),离线计算矩阵Jt、S和W。
步骤2对目标进行运动规划,获得目标的期望运动信息(位姿、速度、加速度)。

步骤4根据式(5)计算期望合外力。
步骤5通过3.4节所示原始-对偶内点法求解优化问题式(31),得到最优接触力。
4.2 仿真实例
4.2.1 场景1:目标的平移运动
首先考虑空间机器人操作目标进行平移的情形。目标运动轨迹可采用5阶Bézier曲线参数化:
(41)


两机械臂末端接触力的仿真结果如图4所示。未发生违反摩擦约束或机械臂能力约束的情况。在目标的平移过程中,两臂施加的力矩接近于零。由于目标仅在x方向运动,所施加的y方向的摩擦力为零,x方向的摩擦力则与加速度变化趋势一致。在z方向(即目标表面法向),两机械臂需要施加一定的法向压力以产生期望的摩擦力,其变化趋势与摩擦力的幅值基本一致。
4.2.2 场景2:目标的自旋运动
空间机器人抓捕非合作目标后,通常需要施加力矩消除目标的自旋运动。本文采用x-y-z顺序的欧拉角φ=[α,β,γ]T表示目标自旋运动,其轨迹可采用归一化时间的初等函数表示:
φi(τ)=kiexp(-τ)+aiτ2+biτ+ci
(42)

(43)

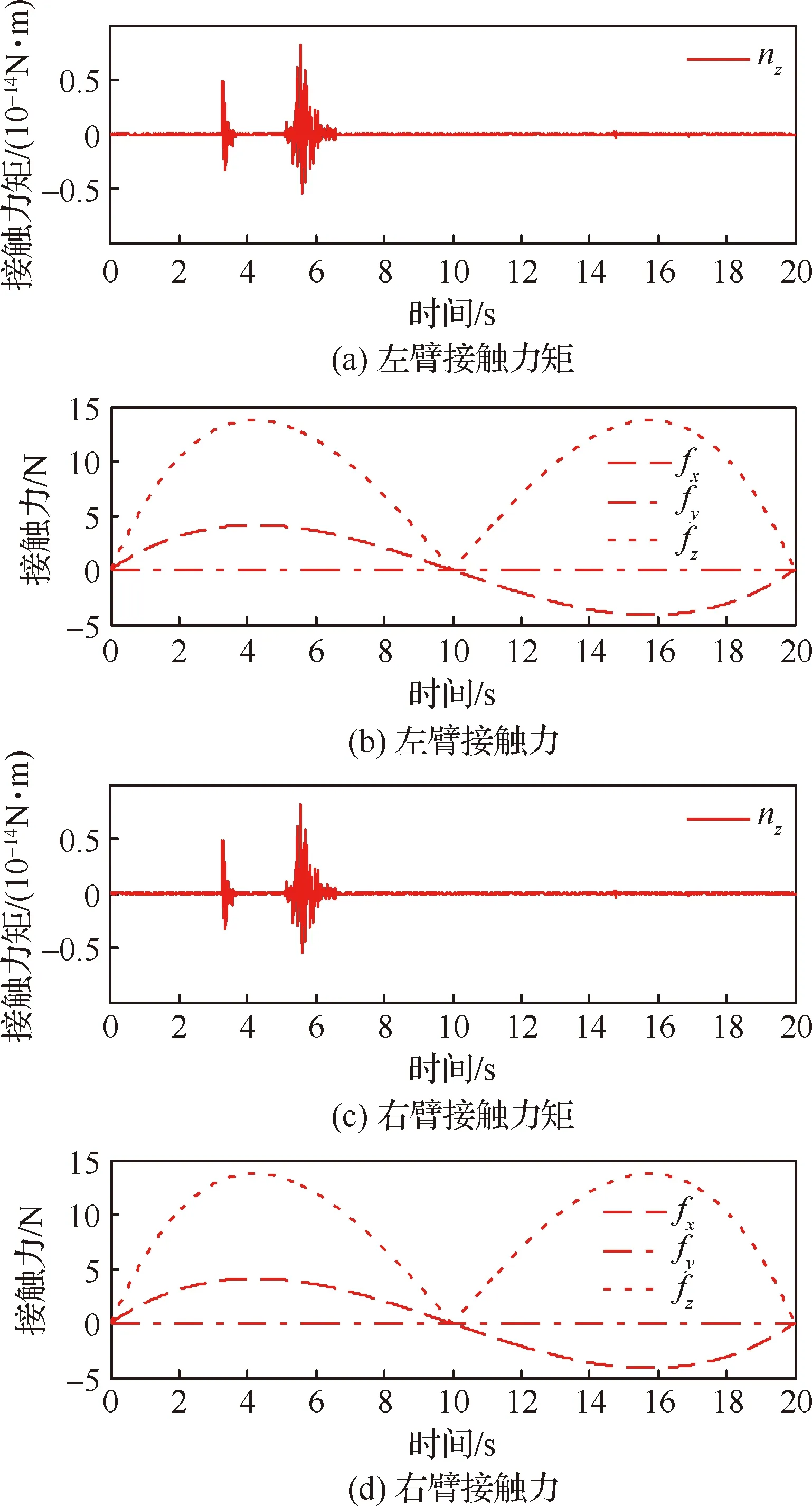
仿真结果如图6所示。未发生违反约束的情况。在目标自旋过程中,两臂所施加力矩的变化趋势与目标角加速度相同。为产生期望的摩擦力矩,两机械臂需要施加一定的法向压力和切向摩擦力以保持接触,并呈指数衰减趋势。随着目标自旋运动的消除,两臂接触力均收敛至零。

4.2.3 场景3:目标的混合运动


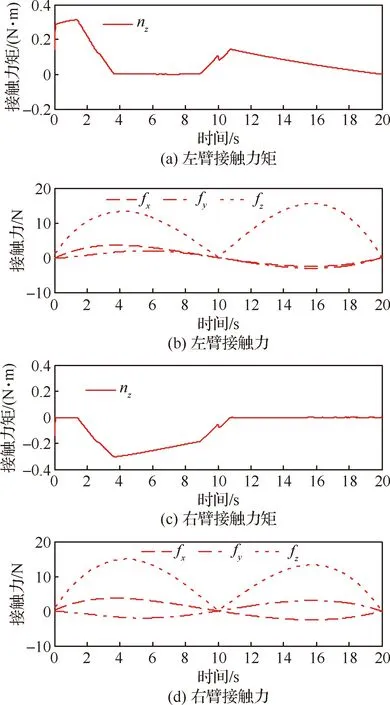
图8给出了两机械臂末端接触力的仿真结果。此时所需的合外力较大,在个别时刻出现了接近或达到关节扭矩约束边界的情况,接触力矩和接触力出现了振动。同时,由于目标的平移与自旋,两臂所施加的力矩与力不再对称,呈现更为复杂的变化。
5 结 论
载荷分配是空间多臂机器人在轨操控的前提条件,其主要任务为按照一定的衡量指标,将抓捕目标的期望合外力转化为各机械臂施加的满足约束条件的抓捕力。本文关于空间机器人载荷分配的研究成果包括:
1) 在地面机械臂及多指手抓取的基础上,将载荷分配研究应用至空间机器人,进行抓捕目标后的抓捕力规划。
2) 载荷分配问题同时考虑了摩擦约束和机械臂能力约束,将摩擦约束线性化,并建立综合考虑目标与机械臂因素的关节扭矩约束,将原非线性规划问题简化为线性规划问题。
3) 对双臂空间机器人抓捕目标后,目标平移、自旋等不同运动状态下的数值仿真,验证了在满足约束的前提下所提方法针对复杂运动状态的有效性。