空间机器人研究进展及技术挑战
2021-03-28孟光韩亮亮张崇峰
孟光,韩亮亮,张崇峰
1. 中国航天科技集团有限公司 空间结构与机构技术实验室,上海 201109 2. 上海宇航系统工程研究所,上海 201109 3. 上海交通大学 机械系统与振动国家重点实验室,上海 200240
空间机器人,作为一种典型的智能操作系统,其应用正逐渐改变航天运输、在轨建造、在轨维护、星球探测的传统模式,是未来无人、载人航天任务的重要使能手段之一[1-2]。在载人航天探索活动中,空间机器人担任了载人前的探路者、载人活动中的助手、载人活动后的维护者的角色;在无人航天科学探索活动中,机器人更是有效扩展了人类的活动和操控范围。
按照应用场景及技术特点划分,空间机器人主要可划分为轨道空间机器人及星表机器人两大类型。轨道空间机器人应用方面,在空间站应用领域已实现多类机器人的工程应用及技术验证,在轨服务领域各国也完成了若干类技术验证。星表机器人应用方面,以星表巡视器为代表的机器人系统已成为月球、火星表面科学探测最直接有效的手段之一。通过已完成的在轨应用及验证,空间机器人在机构构型、驱动关节、末端执行器、感知认知、行走移动、动力学与控制、人机交互与遥操作方面已取得大量实用的研制成果。随着人类在空间探索领域的不断深入,在轨抓捕、在轨服务与维修、在轨组装及星球探测等空间操控任务的复杂化及新型在轨任务需求的出现,对空间机器人的发展和应用提出了新的技术挑战。
本文综述了国内外轨道空间机器人、星表机器人的应用进展,探讨了空间机器人的技术难点与研究进展,展望了空间机器人未来的应用前景。
1 轨道空间机器人的应用现状
自20世纪70年代空间机器人概念提出、20世纪90年代空间机器人的首次在轨验证起,针对空间机器人技术的验证或航天器任务的需求,至今已开展了数以百计的空间机器人系统的样机研制或概念设计,其中有公开报道的14类(见表1)空间机器人系统完成了在轨运行任务或经历了飞行验证。今后几年内,将有更多更新的空间机器人系统计划开展航天任务或演示验证。

表1 轨道空间机器人在轨任务汇总Table 1 Summary of on-orbit tasks of orbital space robots
1.1 国际空间站舱外工作机器人系统
国际空间站是目前空间机器人系统应用较多、较成功的领域,舱外配备了加拿大机械臂、日本实验舱机械臂、灵巧机械手等,舱内开展了机器人宇航员等机器人验证,形成了大中小多规格、舱内外全范围、工程应用与技术验证并重的立体化配置格局[3]。
航天飞机遥操作机械臂(Shuttle Remote Manipulator System,SRMS)是世界上第一个实用的空间机械臂,由加拿大MDA公司研制,因此也被称为加拿大机械臂I(Canadarm)[4]。SRMS在1981年STS-2任务中首次被使用,1990—2002年间实现了哈勃望远镜的多次在轨维修,1998年实现了在国际空间站美国“团结号”节点舱与俄罗斯“曙光号”首次组装任务(见图1[4])。SRMS主要用于物资搬运、辅助航天员出舱活动和航天飞机在轨检测等任务,其构型为6自由度2-1-3共线式布局,展开长度15.2 m,在轨操作载荷2 6600 kg,主要传感器为CCTV相机,通过地面遥操作进行控制[5]。

图1 航天飞机遥操作机械臂及其首次空间站在轨组装任务图[4]Fig.1 SRMS and its first space station assembly mission[4]
国际空间站移动服务系统(Mobile Servicing System,MSS)是国际空间站上最复杂的机器人系统[6],由移动基座系统(Mobile remote servicer Base System,MBS)、空间站遥控机械臂(Space Station Remote Manipulator System,SSRMS)、末端灵巧机械手(Special Purpose Dexterous Manipulator,SPDM)及移动传输器(Mobile Transporter,MT)4个部分组成(见图2)[7]。MSS的主要任务是辅助空间站在轨组装、大型负载搬运、ORU更换、航天员舱外活动辅助、空间站辅助维修等[8]。

图2 MMS组成示意图[7]Fig.2 Composition diagram of MMS[7]
SSRMS机械臂于2001年由宇航员在轨安装,7自由度3-1-3构型形式,展开长17.6 m,末端定位精度65 mm,负载116 000 kg。SSRMS配置了4台相机,分别安装于肘部臂杆两端及末端两端。机械臂两端均安装锁合末端效应器(Latching End Effector,LEE),具备“尺蠖”式的跨步移动能力,可覆盖较大的工作范围。
灵巧机械手SPDM于2008年发射进入国际空间站[9],包含一个躯干和两个机械臂,机械臂7自由度,展开长度约3 m,末端定位精度可达到13 mm;末端安装载荷更换工具OTCM(ORU Changeout Mechanism),可配备多种不同类型的操作工具,具备开展一些精细操作的能力[10]。2011年,NASA和加拿大航天局利用SPDM合作开展了机器人燃料加注演示任务(Robotic Refueling Mission,RRM)[11],实验中灵巧机械臂SPDM利用特制的RRM工具,演示全套的卫星维修和燃料加注任务(见图3)。
图3 机器人在轨加注任务[11]Fig.3 Robotic refueling mission[11]
日本实验舱机械臂JEMRMS(JEM Remote Manipulator System)是安装于国际空间站日本实验舱的机器人系统[12],于2009年随JEM在轨组装完成。JEMRMS由主臂(Main Arm,MA)、小型灵巧臂(Small Fine Arm,SFA)和控制站组成(见图4)[13]。主臂MA展开长度10 m,6自由度,臂杆采用碳纤维加强材料,肘部及腕部配置视觉相机,末端效应器可抓取国际空间站通用抓取接口PDGF,末端定位精度50 mm,其末端工具上配置了力/力矩传感器可用于柔顺操作,主要功能为物资搬运和ORU更换。小型灵巧臂SFA展开长度2 m,6自由度,末端定位精度10 mm,相对与主臂MA可执行更灵巧的操作,主要功能为舱外暴露载荷照料。小臂工作时由主臂MA抓取接收能源和数据,并形成串联宏微机械臂协同工作[14]。

图4 日本实验舱机械臂的主臂及小型灵巧臂[13]Fig.4 MA and SFA of JEMRMS[13]
1.2 国际空间站舱内工作机器人系统
作为大型、载人的航天器,空间站为空间机器人演示验证提供了得天独厚的先天条件,目前包括Robonaut 2、KIROBO、Skybot F-850相继进入国际空间站开展了技术验证。
ROKVISS项目于2004年在国际空间站ISS上进行了飞行试验[15]。ROKVISS项目包括两个关节、立体相机、控制器等(见图5)。ROKVISS项目主要验证了DLR高集成度、模块化、轻量化关节,演示验证了自动控制、力反馈遥操作等不同控制模式。

图5 ROKVISS验证平台组成[15]Fig.5 Components of ROKVISS experimental platform[15]
2011年NASA与通用公司GM联合研制的第二代机器人宇航员R2(Robonaut2)进入国际空间站[16],主要开展了任务面板上操作验证(见图6)。R2在形体上具有头部、颈部、躯干、双臂、多指灵巧手等人类特征,全身共42个自由度,其中包括3自由度颈部、2个7自由度的手臂、2个12自由度的五指灵巧手以及1自由度腰部,可达到类人的工作能力;集成了视觉相机、红外相机、六维腕力传感器、接触力传感器、角度及位移传感器等约300多个传感器,是典型多传感器集成的复杂系统。R2在2014年配置了双腿,腿的末端配置扶手抓取工具(见图7),使之具备出舱服务移动能力[17]。

图6 机器人宇航员R2在国际空间站[16]Fig.6 Robonaut2 in ISS[16]

图7 升级爬行双腿的机器人宇航员R2 [17]Fig.7 Robonaut2 upgraded by addition of two climbing legs [17]
2013年8月,日本“鹳”号货运飞船搭载发射了小型机器人宇航员“KIROBO”(见图8),其身高约34 cm,重约1 kg,可以与人进行交流并且具有肢体语言,其主要任务为与国际空间站日本宇航员对话,消除宇航员在轨寂寞感[18]。

图8 小型机器人宇航员“KIROBO”[18]Fig.8 Small robot astronaut KIROBO[18]
2019年8月,俄罗斯联盟号飞船搭载发射人形机器人Skybot F-850至国际空间站[19],它是FEDOR研究计划的成果。Skybot F-850是具备四肢即双臂双腿的空间仿人机器人(见图9),具备模仿航天员作业的能力。在国际空间站约半月的测试中,F-850测试了开启舱门、传递工具、模拟舱外活动等试验。

图9 Skybot F-850在国际空间站[19]Fig.9 Skybot F-850 in ISS[19]
1.3 中国空间站机器人系统
中国非常重视空间机器人系统的研制,在载人航天空间站规划了大型、中型两套空间机械臂系统,也利用载人飞行器开展了空间机器人相关技术的在轨验证。
2016年,天宫二号机械臂系统随“天宫二号”空间实验室发射入轨,天宫二号机械臂系统包括6自由度轻型机械臂和五指仿人灵巧手组成的仿人型机械臂本体、在轨遥操作人机接口、全局立体视觉模块等。在轨测试中,航天员与机械臂系统协同开展了动力学参数辨识、抓漂浮物体、与航天员握手、在轨维修等试验(见图10)。在轨维修验证试验包括拆卸电连接器、撕开多层防护、旋拧电连接器、使用电动工具拧松螺钉以及在轨遥操作等[20]。

图10 航天员控制天宫二号机械臂[20]Fig.10 Astronauts controlling TG-2 robotic manipulator[20]
中国载人航天空间站在建造阶段将配备核心舱、实验舱机械臂两套机器人系统(见图11)。核心舱机械臂主要用来完成空间站舱段转位与辅助对接、悬停飞行器捕获与辅助对接、支持航天员EVA等,拟于2020年发射[21];实验舱机械臂主要用以暴露载荷照料、光学平台照料、载荷搬运、支持航天员EVA等活动,拟于2022年发射[22]。核心舱机械臂和实验舱机械臂展开长度分别约为10 m和5 m,最大在轨载荷分别为25 000 kg和3 000 kg,均具有7个自由度,转动关节的配置采用“肩3+肘1+腕3”方案。肩部和腕部设置两个末端执行器,可实现“爬行”功能。两个机械臂可独立工作,也可以协同工作,也可串联组成组合臂共同完成空间站的维修维护任务。

图11 中国空间站的核心舱[21]和实验舱机械臂系统[22]Fig.11 Core module manipulator[21] and experimental module manipulator[22] for Chinese Space Station
1.4 在轨自由飞行空间机器人应用进展
卫星及飞行器的在轨服务与维护是空间机器人后续应用的重点方向,目前虽尚未形成大规模成熟应用,但已开展了大量的在轨试验验证。该类机器人多属于自由飞行机器人的范畴。
ROTEX项目于1993年在哥伦比亚号航天飞机上进行了飞行演示[23]。ROTEX机械臂6自由度,展开长度约1 m(见图12),其手爪配置了六维力、触觉阵列、激光雷达、双目相机等传感器,执行了桁架装配、拔插电连接器、抓取浮动目标等试验任务[24]。验证了宇航员在轨遥操作、地面遥操作、基于传感器的离线程序等操作模式。

图12 ROTEX在轨及地面实验室状态[23]Fig.12 ROTEX set-up in spacelab and in laboratory[23]
如图13所示,机械臂飞行演示验证系统MFD(Manipulator Flight Demonstration)在1997年于“发现号”航天飞机上成功进行了演示试验[25]。MFD机械臂6自由度、展开长度1.5 m,是日本实验舱机械臂JEMRMS上SFA的复制品。MFD主要作用是验证SFA性能,包括评估空间机械臂性能、评估空间机械臂控制系统人机接口的性能、ORU安装与卸载、门的开关、地面遥操作演示试验等。

图13 MFD开展ORU安装与卸载试验[25]Fig.13 ORU detachment/attachment experiment by MFD[25]
日本工程实验卫星ETS-VII(Engineering Test Satellite)的机器人系统具有里程碑意义[26],于1997年发射,它是第一个舱外自由飞行空间机器人(见图14),具有地面遥操作和在轨自主控制的能力。ETS-VII的跟踪星上装有两套机器人实验系统,一套是NASDA研制的长2 m、6DOF的机械臂,装有单自由度末端效应器,用于对具有标准捕获接口的ORU等的操作[27];另一套是MITI研制的由5DOF的机械臂和三指多传感器末端效应器组成的先进机械手(Advanced Robot Hand,ARH),总长为0.7 m。ETS-VII任务完成了机械臂漂浮物体抓取、ORU更换和燃料补给、视觉监测、目标星操作与捕获等实验[28]。

图14 日本ETS-VII机械臂试验载荷[26]Fig.14 Japanese ETS-VII payload for robot experiments[26]
轨道快车计划(Orbital Express)是由DARPA组织的在轨服务体系演示计划,于2007年实施(见图15)。轨道快车机械臂系统由加拿大MDA公司提供,展开长度3 m,6自由度,末端配置“捕鼠夹”式末端效应器,可夹持捕获探头适配器PFA[29]。轨道快车项目在轨验证了自主组件交换、燃料补给、自主交会对接任务。

图15 轨道快车机械臂系统地面及在轨系统组成[29]Fig.15 Orbital express demonstration manipulator system ground and flight segment architecture[29]
中国运载火箭技术研究院研制了“遨龙一号”机械臂[30],于2016年6月随“遨龙一号”飞行器完成空间飞行演示试验。空间机械臂具有6个自由度(见图16),开展了空间碎片主动清除、非合作目标探测与抓捕实验。

图16 “遨龙一号”空间机械臂地面样机[30]Fig.16 Prototype of AOLONG I space manipulator[30]
2 星表空间机器人应用现状
星表机器人目前并没有明确的定义,一般着陆于外星球表面可以自主或遥控开展移动、操作、科学作业的探测器都可划分在星表机器人的范畴。本文讨论的星表机器人主要限定在可在星表移动、操作作业的机器人系统,如星表巡视探测器、着陆器的机械臂系统。目前成功着陆于月球及火星,成功开展巡视移动或机械臂操作作业的星表机器人如表2所示。

表2 星表空间机器人在轨任务汇总Table 2 Summary of on-orbit tasks of planetary robots
2.1 月面机器人
1970年,前苏联发射Luna 17探测器,其主要有效载荷为月球车1号Lunokhod 1(见图17)。Lunokhod 1是历史上第一辆月球车,其主要任务为月面移动勘察和月面精细探测,重756 kg,长2.94 m、宽1.96 m,8轮独立驱动。月球车工作11个地球日,共行走10.54 km,实际运动速度为0.14 km/h,可登上30°斜坡,越过0.4 m高的障碍物和0.6 m的沟壑[31]。
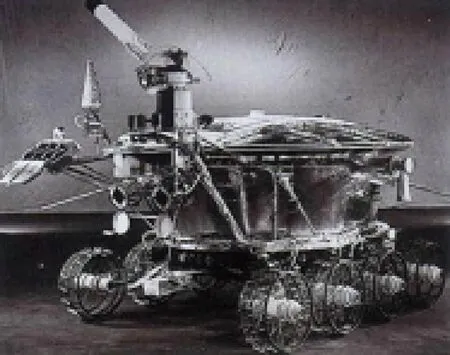
图17 月球车1号[31]Fig.17 Lunokhod 1[31]
美国NASA的阿波罗月球车Lunar Rover Vehicle(见图18),分别搭载在Apollo15(LRV-1)、Apollo16(LRV-2)和Apollo17(LRV-3)上,也是唯一由宇航员驾驶的月球车。LRV车长为3.1 m、轮距为1.83 m,车轮直径0.82 m,具备2名宇航员的承载能力。LRV发射时处于折叠状态,到月球表面后由宇航员手动安装展开。移动系统全轮驱动、独立转向,移动底盘采用四套扭杆式悬架系统,多个独立悬架通过扭杆弹簧和载荷平台固连[32]。

图18 阿波罗月球车[32]Fig.18 Lunar rover vehicle in Apollo Program [32]
2013年12月,中国嫦娥三号巡视器“玉兔号”成功落月并完成月面巡视探测任务。2019年1月,嫦娥四号巡视器“玉兔二号”成功落月并实现月背原位探测和巡视勘察任务(见图19)。月面巡视器包括移动、结构与机构、制导导航与控制、综合电子、电源、热控、测控数传和有效载荷共8个分系统,设计质量140 kg。移动分系统采用主副摇臂悬架方案,由车轮、摇臂和差动装置等组成,6个车轮采用独立驱动方式,并利用4个角轮实现转向,具备在月面前进、后退、转向、爬坡和越障能力[33]。移动系统最大运动速度200 m/h、爬坡角度30°、越障高度200 mm。“玉兔号”月面巡视探测器配置了3自由度机械臂。配置了全景相机、测月雷达、红外成像光谱仪、粒子激发X射线谱仪等科学载荷[34]。

图19 嫦娥三号及嫦娥四号月面巡视器[33]Fig.19 CE-3 and CE-4 lunar rovers[33]
2.2 火星机器人
索杰纳(Sojourner)是“火星探路者”携带的火星巡视器,于1997年7月着陆在火星表面(见图20)。索杰纳在“火星探路者”附近100 m的范围内进行了科学实验[35]。索杰纳重10.5 kg,体积为660 mm×480 mm×300 mm,采用6轮摇杆悬吊式结构,轮子直径130 mm、轮宽60 mm,设计速度最大10 mm/s。角上的4个轮子有独立的驱动和控制能力力。索杰纳工作50个火星日,搜集了火星表面环境、岩石、地貌结构等数据,完成了轮壤作用、导航试验及巡视器工程性能的验证。

图20 “索杰纳”火星巡视探测器[35]Fig.20 Sojourner Mars exploration rover[35]
“勇气号”(MER-A)与“机遇号”(MER-B)为一对孪生探测器,于2003年发射,2004年到达火星,科学目标和探测器结构相似(见图21)。机遇号/勇气号高1.5 m、宽2.3 m、长1.6 m,其质量为180.1 kg。机遇号/勇气号继承了索杰纳六轮摇臂式结构,移动机构新增了可折叠的功能,使悬架能够收回到四面体着陆器中。MER在坚硬平直表面上的最大速度50 mm/s,实际运行速度10 mm/s。MER配置5自由度机械臂,其主要作用是部署各种设备仪器,并且安放在火星表面[36]。

图21 “勇气号”和“机遇号”火星巡视探测器[36]Fig.21 Mars exploration rovers Spirit and Opportunity[36]
“好奇号”是NASA火星科学实验室(Mars Science Laboratory,MSL)的巡视探测器(见图22[42]),于2011年11月发射,2012年到达火星表面。“好奇号”巡视器结构机构很大程度上继承了“勇气号”“机遇号”,但尺寸增大,质量890 kg,极大提高了科学载荷携带能力[37]。MSL配置了样本获取、样本处理和传递系统(SA/SPaH)[38],具有强大的采样和样本在线处理能力,由5自由度机械臂[39]、转台、转台上的工具和科学仪器组成,可完成样本检测、取样、样本加工和样本传递等动作[40-41]。能源方面MSL巡视器采用核电池供电,取消了MERs车身上的太阳能阵列板[42]。

图22 MSL火星巡视探测器系统[42]Fig.22 MSL Mars exploration rover system[42]
上述星表巡视器主要以移动作业为主,部分巡视器配置了机械臂。机械臂是在星表开展近距离操作最直接的手段之一,一些成功着陆于星表的着陆器也配置了机械臂,用于开展表面采样、载荷释放、移动载荷就位探测等任务。2008年Phoenix“凤凰号”火星着陆器在火星着陆(见图23[43]);其上的机械臂4自由度,展开长度2.4 m,可在-90~-20 ℃的火星白昼工作,末端集成了挖掘铲、热量及逸出气体分析仪TEGA、电化学和电导率分析仪MECA[44]。2018年,“洞察号”InSight火星着陆器顺利着陆,其机械臂基本继承了“凤凰号”的方案(见图24[45]);“洞察号”用于火星内部探测活动的两个重要科学载荷火星地震仪SEIS及热流与物理性质探测包HP3,均由机械臂释放布置于火星表面[46]。

图23 “凤凰号”着陆器及其机械臂[43]Fig.23 Phoenix lander and its robotic arm[43]

图24 “洞察号”火星着陆器概念图[45]Fig.24 Concept of InSight Mars lander[45]
3 空间机器人技术难点与研究进展
空间机器人是多学科交叉融合的典型应用对象,涉及系统构型、操作机构、移动机构、驱动器件、感知测量、导航控制、运动规划、动力学与控制、遥操作与人机交互、自主智能、地面试验验证等多方面的共性关键技术。针对具体的空间机器人及其不同的应用任务,其涉及的技术难点也各不相同;随着后续需求和任务的复杂化,空间机器人也在现有基础上提出了新的技术增量需求。本文主要介绍机构构型、关节驱动、抓取操作、行走移动、感知认知、动力学与控制方面的难点及研究进展。
3.1 空间机器人机构构型
机构是空间机器人的核心组成部分,其提供了满足空间机器人系统任务功能要求的基本结构。从空间机器人发展的历史而言,早期成熟应用的加拿大II臂SSRMS、日本实验舱机械臂JEMRMS等可看作单机械臂形式的机构构型,其特点是:机构构型采用单臂多关节串联结构,5~7自由度,由关节、臂杆、末端效应器等组成;在单臂机器人的应用基础上,各国又发展了双臂机器人,如灵巧机械手SPDM、机器人宇航员Robonaut,其特点是:机器人系统由两条或以上机械臂组成,部分在躯干部分也设置自由度,构成拟人双臂的特征,各个单臂一般采用7自由度冗余度机械臂具有更强的避障能力,双臂可并行操作或协调工作,特别是双臂机器人可完成类人的操作。目前在空间应用或验证的机器人系统中,最复杂的机器人系统为机器人宇航员Robonaut2,具备头部、颈部、腰部、双臂、灵巧手等人类特征,全身共42个自由度,可达到类似宇航员的工作能力。针对后续空间机器人任务及功能需求,空间机器人在机构构型上的技术挑战主要体现在:① 进一步增强空间机器人操作的灵巧性和精度,具备开展精细化操作的能力;② 进一步增加对大型航天器广域工作空间的操作覆盖能力,进一步增加对狭小空间的操作可达能力;③ 针对复杂多变、操作尺度不一的任务及多样化的环境,机器人具备可灵活、可靠、自主地达到期望构型的能力和方法。
在针对后续非合作目标操控、复杂维修操作的规划任务中,如Eurobot[47]、SUMO计划[48]、FREND计划[49]、凤凰计划、RSGS计划[50]等,飞行器都配置了两条或两条以上的机械臂,用以满足非合作目标抓捕、精细维修操作的任务需求,可认为多臂、多支链构型是复杂空间机器人构型的发展方向之一,多臂构型相较于单臂构型具有更强的柔性、鲁棒性和并行性。
未来在轨维修中有大量在多障碍物复杂环境、狭小空间内搬运、维修、观测的要求,具备大细化比、强避障能力的超冗余机械臂也是空间机器人的重要发展方向。DARPA的“凤凰计划”中,机器人系统包含若干条机械臂,其中有一条为超冗余机械臂,用于开展照明和观测任务。1995年美国喷气推进实验室JPL研制了12自由度蛇型机器人[51],直径38.1 mm,全长876.3 mm,用于复杂狭小空间内的检测、装配和维修工作。日本国家信息和通信技术研究中心(NICT)2004年提出了在轨维修系统(Orbital Maintenance System,OMS)[52],计划发展用于观测监视的新型模块化超冗余机械臂。除了通过模块化关节串联叠加形成超冗余机械臂的方法之外,连续体的机械臂也可形成柔性超冗余机器人;天津大学耿仕能等以兼顾空间操作的安全性和操作精度的需求为出发点[53],提出一种被动适应碰撞且能保证操作精度的可变刚度丝驱动连续型机械臂,以超弹镍钛合金丝为支撑脊椎和驱动部件的连续型机械臂具有优良的本体柔性,对接触碰撞具有较好的被动适应性(见图25)。

图25 空间机器人新型构型Fig.25 Novel mechanisms for space robots
针对复杂多变、操作尺度不一的任务及多样化操控的需求,可根据环境和任务改变拓扑结构或者末端操作器的自由度的可重构机器人,是空间机器人的可选构型与方案之一。加拿大航天局提出了一种具有可锁定伸缩运动关节的可重构空间机器人概念[54],其可允许机器人通过杆件长度的重构,从而使机器人根据任务具有可变的工作空间。北京空间飞行器总体设计部王康等也提出了一种基于伸缩机构的空间机械臂系统方案[55],可同时具备发射包络小、捕获转移范围大、近距离精细化操作的特点,与传统的固定杆长的机械臂相比,更好地满足在轨服务的不同需求。马里兰大学空间系统实验室针对空间在轨装配、检查及服务的需求,提出了轻质模块化自重构机器人MORPHbots概念[56],其利用标准的关节模块及机器人自身驱动的雌雄同体连接接口可实现多种构型的在轨构造。Yim等提出了一种用于在轨装配可重构机器人的设想[57],每个机器人通过功能模块重构获得,可根据任务构建不周构型的单支链构型机器人,多个单支链构型机器人通过并联又可形成多支链机器人构型;在NASA的支持下,研制了一种新型混合式自重构机器人SuperBot。Zhang等设计了一种自重构空间多臂机器人系统[58],并分析了三臂自由飞行、双腿单臂、单足单臂的三种典型构型。
此外,一些仿生构型的机器人也被设想应用于空间在轨服务与维护。南京航空航天大学戴振东和彭福军针对空间站机器人应用,提出了仿壁虎机器人概念[59],机器人在机构构型上仿壁虎的运动机构,脚掌上布置了仿壁虎脚底刚毛结构的黏附材料结构,地面样机实现了在90°墙面上的爬行。北京航空航天大学徐坤等针对空间站舱上监测操作[60],设计了一种腿臂融合的四足机器人,具有腿臂功能复用的分支,可实现行走和操作。
3.2 空间机器人关节与驱动控制
空间机器人的驱动关节等驱动器是机器人产生力和力矩以实现运动的组件,是组成机器人机构系统的基础运动单元。对于已在轨应用的大型空间机械臂如SRMS、SSRMS等,一般由直流无刷电机、旋转变压器、多级行星齿轮减速箱、关节绝对位置传感器、摩擦制动器、关节控制器等组成,每一个关节都是一个轨道可替换单元ORU,且每一个关节都包含有两套相同的关节电子单元和电机模块进行备份。对于中小型空间机械臂,如Robonaut、ROKVISS等,采用谐波减速器替代了行星减速器,增加了关节的被动柔性,且电机和控制器一般没有额外备份。目前机器人宇航员Robonaut腿部关节是当前空间应用水准较高的驱动关节,其功重比100 N·m/kg、速度1.2 rad/s、工作最低温度-20 ℃。针对空间机器人后续应用对驱动关节的需求,机器人驱动关节的技术挑战主要体现在:① 提高驱动关节力矩感知、绝对位置感知能力;② 关节进一步轻质化,提高关节输出功率密度;③ 提高驱动关节应对外部力时的柔顺能力。
力感知柔顺轻质关节方面具有代表性是DLR研制的一系列关节。德宇航的ROKVISS机器人一体化关节的柔顺性通过力传感器的反馈进行关节的阻抗控制,从而实现柔顺性,关节采用模块化设计,各个关节机构相同,ROKVISS的关节主要由直流无刷电机、位置传感器、角度传感器、谐波减速器、力矩传感器、热控开关等组成;其中电机是德宇航自主研制的直流无框式RobDrive电机,该电机结构紧凑、力矩大、质量轻,而且具有较大的中心孔,有助于机械臂各个关节的走线。减速机为日本Harmonic公司定制的分体式谐波减速机,具有大减速比、质量轻的特点。分离式三件套的结构方便集成轴承、角度传感器等部件,使整个关节的结构更紧凑、质量轻。继承ROKVISS关节在轨验证的经验,DLR研制了三代轻型机械臂(图26)、Rollin’Justin机器人等,轻质机械臂的技术也由KUKA公司技术转换为商用产品KUKA LWR iiwa产品[61]。

图26 DLR轻质机械臂关节[61]Fig.26 DLR LWR arm joint[61]
以上机电一体化的机械臂关节均采用力矩传感器来实现关节的柔顺控制。通过柔顺控制,可以使得机械臂像人的手臂一样执行任务,这对安全的人机协作以及避免机械臂意外碰撞造成自身和碰撞对象的损坏具有重要意义。现有空间机械臂关节利用力传感器信息对输出的力/位关系进行主动控制,模拟出关节的柔顺特性。但是受限于关节控制器和力矩传感器的带宽,该类型柔顺关节对于低频率范围的物理接触能够实现低阻抗性能,但对于高频率物理外力接触难以达到柔顺效果;提高力矩反馈元件和控制系统的增益虽然能够一定程度上降低高频率物理接触时关节的刚度,但同时也会引起系统的不稳定性。Robonaunt2机器人的关节采用柔顺关节,在关节的减速器和输出轴之间安装弹性元件-扭簧[16],如图27(a)所示,实现被动柔顺,同时减速器输出端和关节的输出端都安装有位置传感器,结合两个位置传感器的差分信号和已知的扭簧刚度可以计算出关节的输出扭矩以实现关节力矩控制。意大利技术研究所(IIT)Tsagarakis等研制的紧凑型SEA也具有典型性[62],其通过多个线性弹簧组合实现了扭簧作用从而实现了弹性器件的小型化,如图27 (b)所示。串联型结构空间机器人采用被动柔顺关节具有两个优点,其一当机器人与外界有力接触时,尤其是快速接触或者机器人捕获大惯量的目标时,相对于靠软件实现的主动柔顺关节,可以更有效地缓冲接触力的冲击;其二当机器人与宇航员协助完成任务时,无论在任何情况下被动柔顺关节都可以提供柔顺性,使宇航员更具有安全性。被动柔顺关节在处理快速力接触和协助安全性方面更具有优势,是一体化关节发展的技术趋势。德宇航已研制出基于被动柔顺的变刚度机器人一体化关节,在减速器和输出轴之间安装弹性元件,通过改变弹性元件的状态可以改变关节的刚度,从而使关节具有柔顺性和刚性以适应不同的工况条件。DLR提出了基于凸轮原理的变刚度机器人柔顺关节(见图28),采用凸轮结构实现柔顺关节刚度的调节[63],德国宇航中心的最新拟人机械臂David采用了该类型的变刚度关节[64]。

图27 弹性关节中的定制力矩弹簧Fig.27 Custom torsion springs in SEA

图28 基于凸轮原理的变刚度关节[63]Fig.28 Variable stiffness joint based on cam mechanisms[63]
3.3 空间机器人末端抓取与操作技术
作为机器人的执行器件,末端机械手是机器人实现抓取、维修、装配的基本器件,直接决定了机械臂的先进性和智能化程度。从空间机器人末端抓取与操作的发展来看,早期的末端执行器一般以抓取操作为主,且操作目标是合作的目标适配器,如加拿大机械臂II的末端效应器LEE及目标适配器PDGF,均为执行确定任务、功能相对单一的专用末端效应器,如图29所示。随着空间操作任务的复杂化,具有多种功能的可切换工具及多指灵巧手也开始了在轨的演示验证。空间机器人末端抓取与操作的技术挑战主要体现在:① 进 一步提升对非合作目标的抓取能力;② 进一步提供多功能、精细化维修维护操作;③ 进一步提供近似人的通用化的抓取和操作能力。
加拿大机械臂II的锁合末端效应器LEE,以三根钢丝绳咬合的方式实现柔性捕获,由滚珠丝杠和碟簧实现拉紧,由锁合机构实现机械及电气连接,末端效应器LEE及其操作接口目标适配器PDGF(Power and Data Grapple Fixture)已成为目前空间站机械臂操作的标准接口[65]。哈尔滨工业大学提出一种抱爪式机械手[66],目标适配器为一根手杆,当机械手进入捕获范围后,卡爪将完成卡紧动作,将手杆压入接纳槽中实现锁紧,完成抓取。日本航天局JAXA设计了一种小型机械臂用来在轨组装望远镜反射面[67],其肩部和腕部各有一个末端效应器,并有大、小两种规格的目标适配器;末端效应器通过导向块的导向作用实现对目标适配器的捕获,捕获完成后,通过电机带动撑杆向左或向右运动,驱动锁钩向内或向外运动实现锁合,电连接器的插合与锁合同步完成;此外末端效应器还具有力矩输出的功能。
SPDM的OTCM组成包括平行虎口钳、视觉系统、力矩套筒伸缩机构、力矩套筒驱动机构等。OTCM主要用于载荷和工具的更换,可实现对H型、X型等多种接口的抓取,必要时还可进行动力/力矩传递。在SPDM执行的RRM任务,为SPDM设计了多种专用工具[11],分别是锁线剪及热毯切割工具WCT、多功能操作工具MFT、安全螺母拆卸工具SCT以及舱外燃料加注工具ENT。4种工具中,MFT工具还可以连接4种工具接头以完成针对不同零件的拆卸任务,分别是三级帽拆卸接头TCA、圆形帽拆卸接头ACA、T型阀拆卸接头TVA和插塞操作接头PMA。EUROBOT机器人要执行多种不同的任务[68],设计了可更换工具的末端执行器,包括EVA把手工具、三指工具、适配器抓取工具等。
NASA研制的Robonaut手是一种可以用于国际空间站进行舱外作业的装置,先后研制了两代灵巧手[69];R2灵巧手是由5根手指和1个前臂构成的一个完全自相容的单元,其中5根手指共有12个自由度,前臂提供了2个腕自由度;14个自由度驱动需要的18个直流电动机以及相应的驱动电路板封装在前臂内。手指、拇指和手腕主要使用了3类传感器:关节绝对位置传感器、六维力传感器以及腱绳张力传感器。德国宇航中心先后研制了DLR-I手和DLR-II手[70];DLR-II手包括4根手指,总共12个自由度,每根手指的3个独立关节均由无刷直流电机、谐波齿轮减速器以及基关节伞锥齿轮组成;2个自由度的基关节采用差分伞锥齿轮驱动方式;该手配备先进的智能传感器系统,拥有指尖五维力/力矩、关节位置、温度、类似皮肤触觉、关节扭矩、速度等传感器。哈尔滨工业大学(简称“哈工大”)与德宇航合作,分别在2004年和2008年成功研制出HIT/DLR-I手[71]和HIT/DLR-II手[72]。HIT/DLR-I手使用4个相同的模块化结构手指,每个手指具有4个关节,3个自由度,拇指另外具备一个相对于手掌和其余4指开合的自由度,共计13个自由度;HIT/DLR-II手包含5个相同的模块化手指,共计15个自由度,采用体积小、重量轻的盘式电机驱动以及谐波减速器+齿形皮带的传动方式,重量约为1.5 kg,体积与普通人手相当;灵巧手在天宫二号上进行了在轨验证,手指集成了电机位置、关节位置、关节力矩、指尖六维力/力矩、触觉、温度等多种传感器,如图30所示。

图29 典型的机器人末端执行器Fig.29 Typical robotic end-effectors

图30 典型的空间灵巧手Fig.30 Typical space robotic hands
3.4 空间机器人行走移动技术
移动机动能力是空间机器人的关键能力之一,多种移动形式可实现机器人作业及探测区域的覆盖和可达,如机器人在行星表面的移动、行星内部孔洞的移动、大型航天器表面的移动等,本文此处主要讨论行星表面及内部复杂地形的移动形式,如图31所示[73-80]。迄今为止,只有几种形式的移动机构成功地部署在月球及火星上,其典型形式为具备前后轮转向能力的六轮摇臂被动悬架机构,可在低坡度(<25°)相对平坦的沙尘地形上移动,移动速度一般低于50 mm/s,可跨越车轮半径大小的障碍物,在火星表面实现了12~20 m/h速度下百米级的自主导航移动。针对后续深空探测及载人探测任务的需求,空间机器人在行走移动的技术挑战主要体现在:① 在极端环境条件下提供适应能力更强的悬架及移动机构实现高速度、长距离的星表移动;② 提供陡坡、深坑、熔岩管道等极端地形的进入及通过能力;③ 在有限感知、能源及计算能力的限制,星表图像纹理不丰富、缺少前验信息等不利条件下,提供高可靠、高实时性、高自主性的星表导航能力。
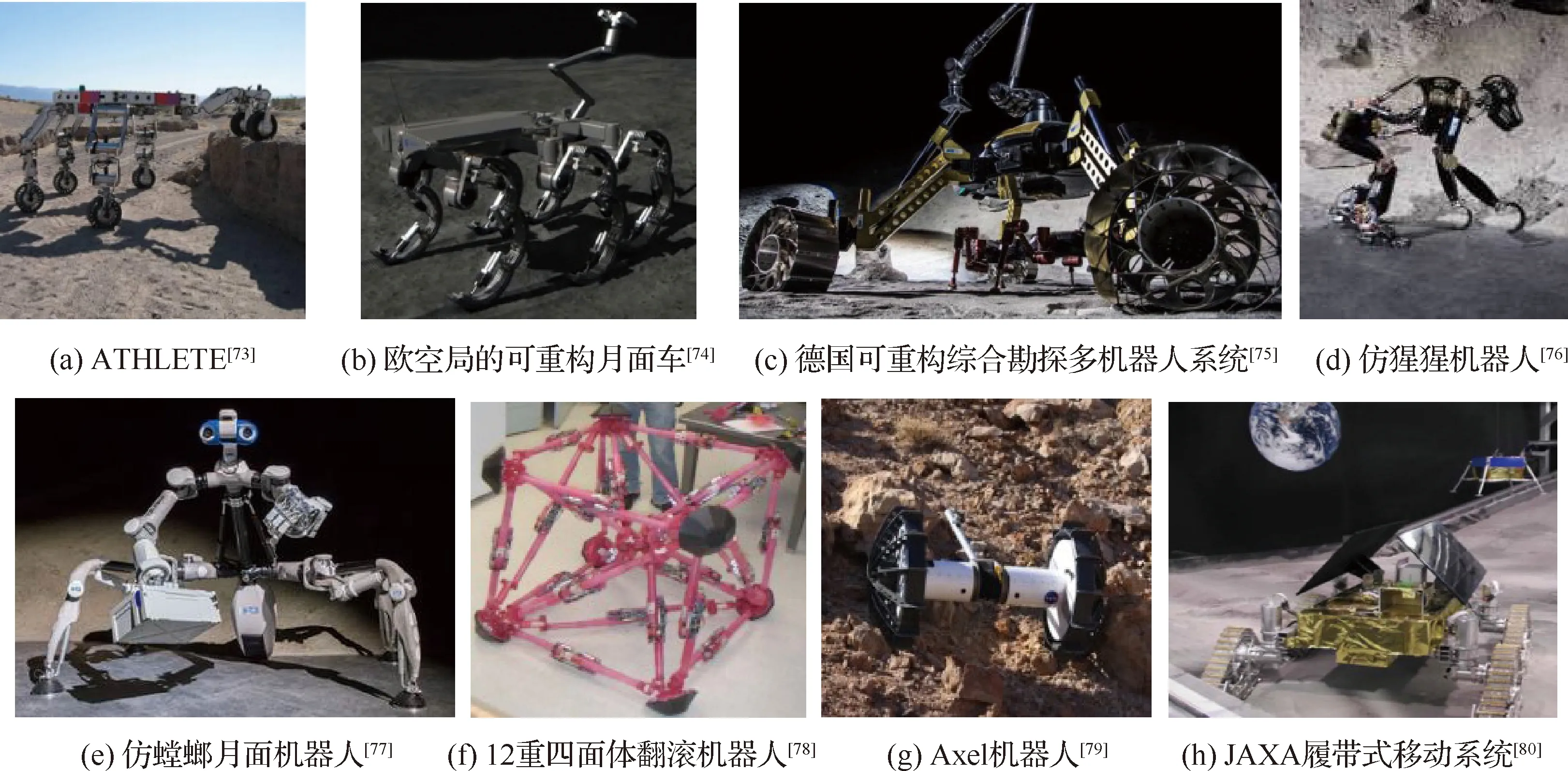
图31 新型星表移动机构研制进展Fig.31 Research progress of some novel planetary mobility mechanisms
在移动机构方面,在当前较经典的轮式移动机构之外,各国科研机构开展了新型移动机构的研究[74]。NASA喷气推进实验室的样品返回探测器SRR提出了具有4个可独立驱动、转向的驱动轮系及主动控制的平行四边形连杆机构悬挂系统[81]。NASA喷气推进实验室(JPL)在全地形六足地外探测器ATHLETE[73]中提出了六边形底盘、每边配置6自由度机械腿、末端配置车轮可移动、配置末端工具可作业的复合式移动作业机构[82]。ESA月面探测车提出了可重构的移动作业机构实现了一机多用,可利用6个液压驱动轮的构型变化可自重构为普通轮式滚动形态、多足爬行形态和机械臂工作形态。德宇航提出了模块化可重构多机器人月面探测系统RIMRES的概念[75],研发了四轮混合轮腿结构机器人Sherpa和蜘蛛式六足爬行机器人CREX。德国人工智能研究中心(DFKI)设计了仿黑猩猩[76]、仿螳螂的月球探测机器人[77],可根据不同的地形选择两足或四足的行走模式,既能靠四肢站稳、行走,又能用前面两条腿来操纵目标。NASA以火星探测为背景开展了多面体翻滚机器人TET的研究[83],目前实现12重四面体机器人的样机研制[78]。卡内基梅隆大学CMU研制了可以攀爬陡峭斜坡的绳系步行机器人Dante II[84],八条腿可以独立调整垂直位置来避障及适应崎岖地形,通过使用系绳可以在陡峭斜坡上进行上升和下降。Axel是一个可以通过系绳在陡峭斜坡进行升降的双轮绳系机器人[79],两个Axel可以组成DuAxel的四轮机器人。日本宇航探测中心(JAXA)曾研制过履带式的月面移动系统[80]。通过上述研究进展可见,移动机构在当前经典多轮构型优化应用的基础上,进一步发展了多形态仿生、轮-腿-臂复合式、变结构、可重构等新型移动机构,以进一步提高移动速度、地形适应能力等。另外由单一机器人探测发展了多机器人联合探测的概念,以进一步增加作业的灵活性、提高探测效率。
在移动自主导航方面,制导导航与控制(GNC)需完成行星表面移动机器人的导航定姿定位、环境感知、路径规划、运动控制、避障和安全监测等功能,可认为是机器人移动的“大脑”。Lunokhod 1&2通过地面遥控,LRV通过人控驾驶,Sojourner具有简单的障碍检测和避障能力但无自主规划能力,Opportunity和Spirit火星巡视器与嫦娥三号/四号巡视器具有短距离的自主导航能力;美国的火星巡视器Curiosity因搭载更多的传感器的载荷,代表了星表机器人导航与控制的最高水平。嫦娥三号巡视器目前可实现避障反应时间不大于9 s、避障反应距离不小于0.5 m、自主路径规划范围0.5~3 m的技术指标;嫦娥三号巡视器每到达一个位置后利于导航相机对巡视器周围进行环拍,所成序列图像传回地面,由地面操作人员进行图像拼接和三维恢复[85](见图32和图33),据此进行长距离任务规划,确定探测点。出于可靠性及安全因素等多方面考虑,好奇号或嫦娥三号月面巡视器大部分时间仍是由地面工作人员遥控操作;近年来,航天研究人员一直在探讨探测效率高、自主能力强、成本低廉的可靠探测方案。

图32 嫦娥三号巡视器拼接全景图[85]Fig.32 Mosaic and panorama image from CE-3 lunar rover[85]

图33 嫦娥三号DEM图、适宜度图和规划路径[85]Fig.33 DEM map, suitability map and planning path from CE-3 lunar rover[85]
在行星地貌环境自主感知方法方面,美国NASA艾姆斯研究中心Bresina等为提高索杰纳号科学勘探任务的自主性[86],建立了巡视器命令语言系统(Contingent Rover Language,CRL),若巡视器在线科学勘探认为当前场景具有潜在价值,CRL会暂停原有探索任务,并在回传指令中插入该“临时突发项”供地面工作人员分析。在CRL基础上,JPL的Castano等设计了在线自主科学考察系统(Onboard Autonomous Science Investigation System,OASIS)[87],OASIS并不需要等待地面工作人员的指令,而是根据地貌与环境的自主分析来操控巡视器。OASIS通过利用Sober与Canny算子来检测导航相机所采集图像中的闭合轮廓,发展了岩石的快速识别技术[88]。在自主定位与地图描绘方法方面,目前的星表巡视器一般以着陆地点建立全局坐标系[89],融合车载里程计与双目视觉测距信息解算自身全局位置;在行驶过程中,由双目相机收集的表面图像将回传至地面进行光束平差(Bundle Adjustment)解算,重构行驶路径与周边地图,并利用卫星采集的高分辨率图像与重构地图比较,进一步修正巡视器位置。由于全局地图需要通过地面生成,无法通过巡视器实时构建,一定程度上也限制了巡视任务的灵活性。随着机器人同时定位与地图构建(SLAM)技术的成熟,越来越多的学者们也致力于将SLAM技术应用至火星巡视器漫游巡视任务中,如Bakambu等针对火星巡视器测试了数种SLAM算法[90],并提出利用SLAM算法所生成的三维地貌模型设计巡视器可达域。在自主路径规划方法方面,美国火星巡视器建立了路径规划器GESTALT[91],该系统兼顾路径避障、最小转向时间、最短行驶路径,通过一种“投票”机制确定最优路径;不少学者提出采用搜索算法进行路径规划,文献[92]基于A*算法[93],计算包括行驶距离、垂直障碍和转向可操纵性等路径代价;文献[94]则采用Filed D*算法,从而使得巡视器能向任意角度行驶。
3.5 空间机器人感知与认知技术
感知和认知是空间机器人必需的功能之一。空间机器人要实现在轨操作,离不开感知系统的支持。对于目前应用的空间机器人,视觉相机是应用较成熟的传感器,用于遥操作视觉监控、合作和非合作目标认知和测量[95]。遥操作监控视觉仅作监控使用,不作为机器人控制的直接输入量;目前技术成熟,已在轨应用,较典型的应用为NASA的RRM计划,RRM的每个工具上带有两个相机及照明系统用于为遥操作提供视频信息。合作目标测量在目标航天器上安装合作标志器,视觉系统通过对合作标志器的测量获得机械手与操作对象间的相对位置和姿态,引导机械手完成要求的操作任务;目前技术也较成熟,已在轨应用,如ETS-VII、Orbital Express、SSRMS等的空间机械臂系统。对于目标模型完全已知或部分已知的非合作目标测量,目标航天器上不能安装合作标志器,但操作对象的模型完全已知或部分已知,视觉系统直接测量机械手的操作对象,给出机械手与操作对象间的相对位置和姿态,引导机器机械手完成要求的操作任务。目前仍在技术攻关中。感知和认知的主要技术挑战在于:① 发展新型空间机器人传感器,提高三维感知的速度、分辨率,并有效降低传感器的尺寸、重量及功率;② 复杂光照条件下非合作目标、自然物体的识别与位置测量;③ 复杂操作过程中力和接触感知;④ 多传感器的集成及数据融合。
FREND计划验证空间非合作目标自动抓捕的能力,其视觉测量系统由3个相机组成[96],3个相机具有冗余备份功能,当测量目标在一个相机中成像效果差时,另外两个相机仍可构成双目立体视觉实现相对位姿测量,如果目标在3个相机中均正常成像,则可通过信息冗余提高测量精度;FREND机械臂的测量范围为20 cm 以内,测量输出频率为5 Hz。加拿大的MDA公司在针对Envisat 卫星救援计划提出的对接环抓捕工具上配置了多种传感器[97],其上的非接触式传感器可以判断圆环是否进入抓捕包络内;视觉系统有两组,第一组为监视用视觉系统,第二组是用于自动操作的视觉系统,包括两个相机及两个激光发射器,可以构成两套结构光测量系统,每个激光发射器可以发出5条点激光(见图34)。Robonaut2的视觉系统安装在头部结构里,包括四部紧凑型彩色立体摄像机[98],其中两个摄像机的安装与人眼布局相似,能够为机器人和操作人员提供立体视觉,另外两个摄像机作为备用;另外嘴部安装有红外TOF相机,提供景深感知,与双目视觉形成冗余,根据不同场景应用的需要,互为补充,提高测量速度和精度(见图35)。

图34 MDA对接抓捕工具上的传感器系统[97]Fig.34 Sensor system of MDA capture tool[97]

图35 Robonaut2 头部传感器系统[98]Fig.35 Robonaut2 head sensor system[98]
力和触觉的感知是空间机器人接触控制的必需输入,包括行星表面移动与机器人抓取操作的场合。目前应用较广泛的是机械臂腕部的多轴力/力矩传感器及关节内的单轴力传感器,如MSL“好奇号”机械臂的三轴力传感器,SS-RMS、Robonaut2的六维力传感器(见图36),多轴力传感器目前应用面临的主要问题是如何提高在空间真空环境中的可靠性和长寿命的问题。另外,测量抓取过程的接触力是目前空间力感知的一个重要方向,在灵巧手、抓取工具等机器人末端执行器中配置微型力传感器或触觉阵列可有效提高抓取的可靠性,或通过多点力的测量的方式实现目标刚度、几何特征的测量,目前在轨应用的主要有ROTEX手爪触觉阵列及Robonaut2五指灵巧手手指指面配置的微型六维力传感器[69]。目前在空间力感知方向,还有提出利用仿生触须传感器实现空间目标的识别与避障[99],尤其是在空间非合作目标的参数辨识与消旋方面。

图36 R2手指的微型六轴力传感器样机[69]Fig.36 Prototype of 6-axis load cell sensor mounted in R2 robot fingertip[69]
3.6 空间机器人动力学与控制技术
空间机器人属于典型的多体系统,对其动力学建模常用的也是多体系统动力学的方法。在空间机器人动力学建模方法方面,空间机器人动力学特性有别于地面固定基座机器人,突出表现为强非线性、动力学耦合、非完整性等,国内外学者对其动力学分析方法进行了大量研究,成果可主要归结为经典力学方法、凯恩方法和递推计算动力学方法。空间机器人是一个多输入多输出、高度非线性、强耦合的复杂系统,存在着参数摄动、未建模动态与外界干扰等不确定性,因此其控制问题也相当复杂。针对空间机器人后续应用的需求,空间机器人动力学、仿真与控制面对的主要挑战在于:① 多应用场景下复杂异构、同构多机器人集成系统的建模;② 航天员与机器人在同一现场的高安全性人-机系统动力学,机器人与操作目标、操作环境及航天员接触的动力学与控制;③ 漂浮基座空间机器人对非合作目标抓捕的动力学控制。
在多应用场景下复杂异构、同构多机器人集成系统的动力学建模与控制中,目前研究的对象还主要集中在双臂、多臂类多支链机器人,尤其在多臂协同搬运、操作等紧协调的应用场景。北京航空航天大学丁希仑系统总结了拟人双臂机器人协调操作的运动学规划、协调控制方法[100],提出了基于主从式双臂的力/位混合控制方法,即主臂采用位置控制,从臂采用力与位置混合控制。多于双臂的多支链系统的建模与控制难度较双臂更高,刘嘉宇等提出了一种组合式全身柔顺控制方法[101],解决了多臂空间机器人捕获大型翻滚目标时的柔顺接触及碰撞安全问题,提出了一种基于全身阻抗控制和独立导纳控制的组合式接触柔顺全身控制策略,分别在空间机器人多刚体系统质心层面构建机械阻抗特性和在每条机械臂建立导纳特性,实现对外部拖拽的有效管理。
在未来的载人空间探测活动中,航天员需要与机器人在同一共享空间内工作,需要解决航天员、机器人、载荷设备共享工作空间时的本质安全问题,确保机器人工作时不给航天员及周边有效载荷及平台设备带来安全威胁或隐患,这也是当前民用领域“人机协作、人机共融”机器人的发展热点。一方面是如前文所述在常规刚性关节中引入弹性元件或柔性机构,构成串联弹性关节SEA,使得机器人具有高柔顺性、良好的缓冲功能等;另一方面是机器人具备柔顺运动控制的能力,目前基于阻抗控制的柔顺运动控制方法应用相对较多。DLR Ott等在LWR轻质机械臂中采用将电机动力学与力矩反馈相结合的方法[102],将柔性关节机器人系统作为两个无源性系统的串联反馈,在基于无源性理论的柔性关节控制器中引入力矩反馈,基于无源性理论设计的控制器具有算法简单、便于工程应用,且兼顾良好的跟踪性能等优点,解决了位置跟踪和阻抗控制等问题[103]。在Robonaut2中提出了多优先级阻抗控制的方法[104],将笛卡尔末端阻抗作为最高优先级,将关节空间阻抗作为次优先级,使得机器人手臂可以响应手臂不同部位的目标力或目标位置,同时冗余自由度可最大限度地响应或避障。
针对漂浮基座空间机器人对非合作目标抓捕的动力学控制的问题。由于非合作目标运动的不确定性,在接触目标航天器时会出现不确定的干扰。此外,机械臂与基座平台组成高度耦合的动力学系统,机械臂的运动会影响空间机器人基座平台的姿态稳定,这些问题都对空间机器人的在轨稳定控制提出了较大的挑战。针对这些问题,许多学者提出了针对空间机器人系统稳定控制的方法。Xu等针对空间机器人基座平台可控的情况设计了自适应控制方法,并在关节空间中对机械臂控制进行了仿真计算[105];Chu等提出了带扰动观测器的鲁棒控制策略[106],将模型的不确定性与外界的干扰集中在一起,在机械臂的每个关节处设计了扰动观测器,结合PD控制完成对机械臂的控制;Busoniu等提出了自适应神经网络控制方法[107],对不确定部分用神经网络近似,并证明了系统的稳定性;Oda和Ohkami通过估计机械臂产生的角动量[108],然后对基座平台姿态进行补偿控制,对机械臂运动与基座平台姿态进行了协调控制;徐文福等提出在自由漂浮基下,由空间机械臂自身的控制实现机械臂与基座平台协调运动的方法[109]。Yoshikawa 和Yamada提出一种角动量控制策略[110],该方法利用机械臂根据相对位姿进行调整对抓捕对象反复施加脉冲,直至自旋目标的旋转被抑制到很小的状态,并通过合适的坐标变化简化了旋转运动的表达式,设计了一种离散控制器,很好的分析了碰撞情况和稳态条件。Dimitar 提出了偏置动量法与动量分配控制法[111],该方法可使空间机器人在与抓捕对象碰撞前后姿态变化最小,在抓捕机构接近目标阶段进行角动量偏置,在碰撞过程中采用阻抗控制,在碰撞后进行角动量分配控制,从而完成全部捕获操作。
4 空间机器人未来应用展望
空间机器人是实现空间操控自动化和智能化的使能手段之一。在当前在轨应用及验证的基础上,未来空间机器人的应用方向可简要概括为空间目标的抓捕与移除、高价值目标的在轨服务与维修、空间大型构件的在轨组装及星球移动与作业探测。
在空间抓捕方面,空间机器人是抓捕操控的主要手段之一。在当前国内外在轨抓捕的计划和方案中,空间机器人系统均是抓捕和移除的核心手段之一,如SUMO[48]、TECSAS计划(见图37)等。利用在轨抓捕装置可针对运动状态、质量特性参数未知或测量、行为不配合的非合作目标(如故障航天器、空间碎片)开展抓捕、拖曳及移除操作。多臂机器人、变刚度机械臂、柔性机器人等类型的机器人在此类任务场景中较好的应用潜力。

图37 在轨抓取与移除Fig.37 On-orbit capture and removal
在高价值目标的近距离精细化维修维护方面,针对故障卫星的维修服务技术,对故障卫星实施维修救援使其正常工作,对航天器进行故障排除,对航天器进行升级、补给等维护,可有效地延长航天器的在轨寿命或恢复功能,可挽回巨大的经济损失和产生积极的社会影响。利用空间机器人可针对高价值的目标开展精细化的维修维护,包括燃料补加、模块更换、物资运输、在轨维修、重构利用等,典型任务如Restore-L计划(见图38[50])。超冗余灵巧机械臂、双臂或仿人机器人、模块化可重构机器人、多功能末端执行器、多指灵巧手等在此类任务场景中有较大的应用潜力。

图38 Restore-L计划[50]Fig.38 Restore-L Program[50]
在大型构件的在轨组装方面,受火箭推力、整流罩包络及机构复杂度的影响,未来深空探测、天文观测、战略侦察等工程所需的大面积、大跨度空间结构一次性实现在轨布署有较大的难度。在轨组装可将单次/多次发射入轨的结构模块、功能模块等基本单元依序组装成期望的大型空间系统,具有结构效率高、扩展性强、可逐步升级等特性。空间机器人是大型空间结构、载荷、航天器在轨组装的主要手段之一,用以实现组装过程中模块移动、连接、操作、调整等关键动作,如图39所示。

图39 在轨组装Fig.39 On-orbit assembly
在星球移动与作业探测方面,在面向月球、火星等星球的探测活动中,机器人可在恶劣星表环境开展长时间、大范围的资源探测、环境探测、设施建设等任务;后续载人星球探测活动中,机器人也可作为航天员感官和肢体的扩展和延伸,显著提升航天员的工作效率和效能,在极端环境预先探测、人机联合作业、科研站的长期值守与维护方面发挥有益的作用,如图40所示。针对上述任务场景,可发展仿生、可重构、轮足复合式等新型星表机器人。

图40 月面科研站设想Fig.40 Imagination of lunar scientific and research station
5 结 论
空间机器人,包括轨道空间机器人与星表空间机器人,经历若干年的应用与验证,实现了以空间机械臂与星表巡视器为代表工程产品的在轨应用,具备了未来卫星在轨服务、星表科学探测成熟应用的技术基础。
未来在空间目标抓捕移除、高价值目标在轨服务维修、空间大型构件在轨组装、星球移动与作业探测等领域,空间机器人有巨大的应用潜力,是上述重大工程和空间科学应用得以实现的使能技术和手段。
为应对任务需求对空间机器人智能化、高精度、力柔顺、高安全性的要求,空间机器人还需在新型机构构型、轻量化柔顺关节、多功能灵巧末端操作、高机动性自主行走移动、多通道感知认知、动力学与控制等方面开展进一步的基础研究和关键技术攻关。