空间机械臂技术综述及展望
2021-03-28刘宏刘冬雨蒋再男
刘宏,刘冬雨,蒋再男
哈尔滨工业大学 机电工程学院, 哈尔滨 150080
随着空间装置的在轨服务需求越来越迫切,空间机械臂已成为世界各航天大国的研究热点。空间机械臂在航天器的在轨组装、在轨维修、在轨燃料加注、在轨升级等在轨服务中起到关键作用,是航天器在轨服务的核心装备[1]。国际空间站组装建造、维修和应用的经验表明,利用空间机械臂可以在恶劣太空环境下辅助或代替航天员完成在轨操作任务,提高空间操作和应用的安全性和效益。
本文概述了国外空间机械臂的发展情况并分析了发展趋势,总结了空间机械臂的关键技术,重点介绍了中国空间机械臂的发展概况,最后总结了目前空间机械臂技术存在的问题,并对中国空间机械臂的发展提出了建议。
1 国外空间机械臂发展概况
空间机械臂可分为舱内工作和舱外工作两大类。舱内机械臂通常用于载人航天任务,以替代或辅助航天员完成舱内组装、试验、照料或者技术验证等。舱外机械臂主要用于航天器在轨组装、在轨维修、支持航天员舱外活动、科学或技术试验等在轨服务任务,安装载体包括航天飞机、空间站、卫星等。
自从1981年哥伦比亚号航天飞机上空间机械臂在轨应用以来,国外空间机械臂一方面成功应用在航天飞机的载荷操作、哈勃太空望远镜维修、国际空间站建设与维护等工程任务,另一方面已经完成了基于试验卫星、航天飞机、国际空间站等空间平台的关键技术在轨验证,主要项目如表1 所示。随着空间任务的日益复杂以及相关技术的发展推动,空间机械臂技术呈现出以下发展趋势:

表1 国外主要空间机械臂项目Table 1 Major projects of overseas space manipulators
1) 任务类型由简单组装任务向复杂维护任务发展。早期航天飞机机械臂(Shuttle Remote Manipulator System, SRMS)捕获哈勃太空望远镜[2],国际空间站机械臂(Space Station Remote Manipulator System, SSRMS)进行舱段组装[3]等相对简单任务,近期国际空间站特殊用途灵巧操作臂(Special Purpose Dexterous Manipulator, SPDM)完成在轨燃料加注试验(Robotic Refueling Mission, RRM)[4-5]、机器人航天员(Robonaut2, R2)使用工具完成国际空间站舱内维护试验验证[6-9]。
2) 构型配置从单臂工作向多臂操作发展。航天飞机SRMS采用6自由度单臂构型[2],国际空间站SSRMS采用7自由度冗余单臂构型[10-11],而国际空间站SPDM与机器人航天员R2采用双臂构型、国际空间站日本臂(Japanese Experiment Module Remote Manipulator System, JEMRMS)采用宏微机械臂串联构型[12],未来可能会发展多臂构型空间机器人,通过多臂协同运动完成更加复杂的操作。
3) 末端执行器从单一捕获功能向多任务操作发展。航天飞机SRMS、国际空间站SSRMS、日本的机械臂飞行验证(Manipulator Flight Demonstration, MFD)机械臂[13]、日本的工程试验卫星-7 (Engineering Test Satellite VII, ETS-VII)机械臂[14]采用单一捕获功能的末端执行器实现对目标捕获,SPDM利用可更换多种工具的末端执行器实现不同末端功能,机器人航天员R2采用通用机器人灵巧手实现直接使用设备工具进行多任务操作。
4) 操作方式从航天员在轨操作向任务专家地面遥操作发展。航天飞机SRMS机械臂、国际空间站SSRMS机械臂早期操作采用航天员在轨操作方式,而国际空间站SPDM操作、德国的空间机器人技术试验(Space Robot Technology Experiment, ROTEX)[15-16]、国际空间站机器人组件验证(Robotics Component Verification on ISS, ROKVISS)[17-18]操作、SSRMS机械臂目前绝大部分操作均采用任务专家地面遥操作控制方式,大幅减轻航天员的工作负担,有利于提高空间探测效益。
2 空间机械臂关键技术
通过以上对国外空间机械臂的发展趋势分析,空间机械臂系统主要涉及任务规划、系统控制、路径规划、视觉感知、末端执行器、遥操作控制及地面试验验证7项关键技术。
2.1 任务规划技术
任务规划技术综合考虑任务本身的特点、流程和环境等因素,将这些因素作为约束条件,合理规划出完成任务所需的行为决策和动作序列。主要解决空间机械臂的总体方案、操作流程、程序设计以及控制策略设计等。
空间机械臂有其应用或验证的明确目标:如实现国际空间站组装、运营和维护任务,验证机械臂本体设计、控制策略、遥操作等技术。空间机械臂的任务规划根据机械臂需要完成的任务需求和约束条件,建立合理的飞行方案。例如,在航天飞机SRMS机械臂实现国际空间站“团结”号与“曙光”号舱段停泊(图1)任务规划中,综合考虑了SRMS反驱功能、航天飞机姿控发动机推力、对接机构捕获和缓冲功能等多约束因素,涉及到加拿大、美国和俄罗斯同时进行技术综合和仿真分析,明确SRMS机械臂在不同的任务剖面所需执行操作和功能指标[3,19]。

图1 SRMS转移“曙光”号舱段[19]Fig.1 Zarya module being transferred by SRMS[19]
由于国际空间站通用停泊机构能力的限制[20],加拿大SSRMS机械臂完成了许多国际货运飞船的悬停捕获任务,包括对日本货运飞船(H-II Transfer Vehicle, HTV)、美国龙飞船的悬停捕获[21-22],如图2所示。在这些任务中,机械臂的任务规划包括对来访飞行器悬停位置、悬停速度的联合规划,机械臂视觉伺服、随动控制、位置控制切换时机,机械臂跟踪控制/制动能力与来访飞行器控制能力匹配性等方案设计与仿真分析。

图2 SSRMS捕获日本货运飞船[21]Fig.2 SSRMS capturing Japanese cargo spacecraft[21]
任务规划技术是空间机械臂的总体技术,由任务规划实现机械臂的操作任务,同时确定空间机械臂的功能需求、技术指标要求、任务窗口要求以及对其他配合系统的接口要求。
2.2 系统控制技术
系统控制技术主要包括空间机械臂的精细位置控制、柔顺控制、力控制等研究内容。空间机械臂在自由空间载荷转移通过精细位置控制实现,机械臂与被操作对象的安全接触操作主要由柔顺控制来保证,还有部分任务需要机械臂能够主动施加力实现与被操作对象的可靠连接。
航天飞机SRMS机械臂、国际空间站SSRMS机械臂采用刚性机械臂的控制技术,通过降低机械臂运动速度和模态分析避免激励机械臂的柔性振动[23]。日本ETS-VII机械臂开展了柔顺控制和力控制的在轨技术验证,首次利用柔顺控制在轨实现在轨可更换单元(Orbital Replaceable Unit, ORU)装配验证[24-25],如图3所示。

图3 日本ETS-VII[24]Fig.3 Japan ETS-VII[24]
德国ROKVISS、ROTEX等开展了阻抗控制的在轨技术验证,如图4所示,形成了一套可工程化应用的理论体系[26-28]。另外,在ROKVISS的在轨试验中还研究了关节摩擦、关节刚度、温度等对机械臂控制的影响[17-18]。

图4 ROKVISS控制结构[28]Fig.4 Control architecture of ROKVISS[28]
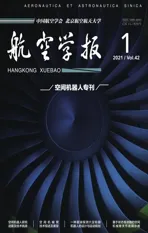
国际空间站日本臂JEMRMS为一个宏-微操作机械臂系统,由主臂、小灵巧臂串联而成,小灵巧臂安装在主臂的末端,如图5[12]所示,用于照料舱外暴露有效载荷。主臂抓住被操作对象后,小臂完成更加灵巧精细的操作任务。其控制上主要考虑了精细操作臂振动的自适应控制,以满足载荷操作的精度要求[29]。
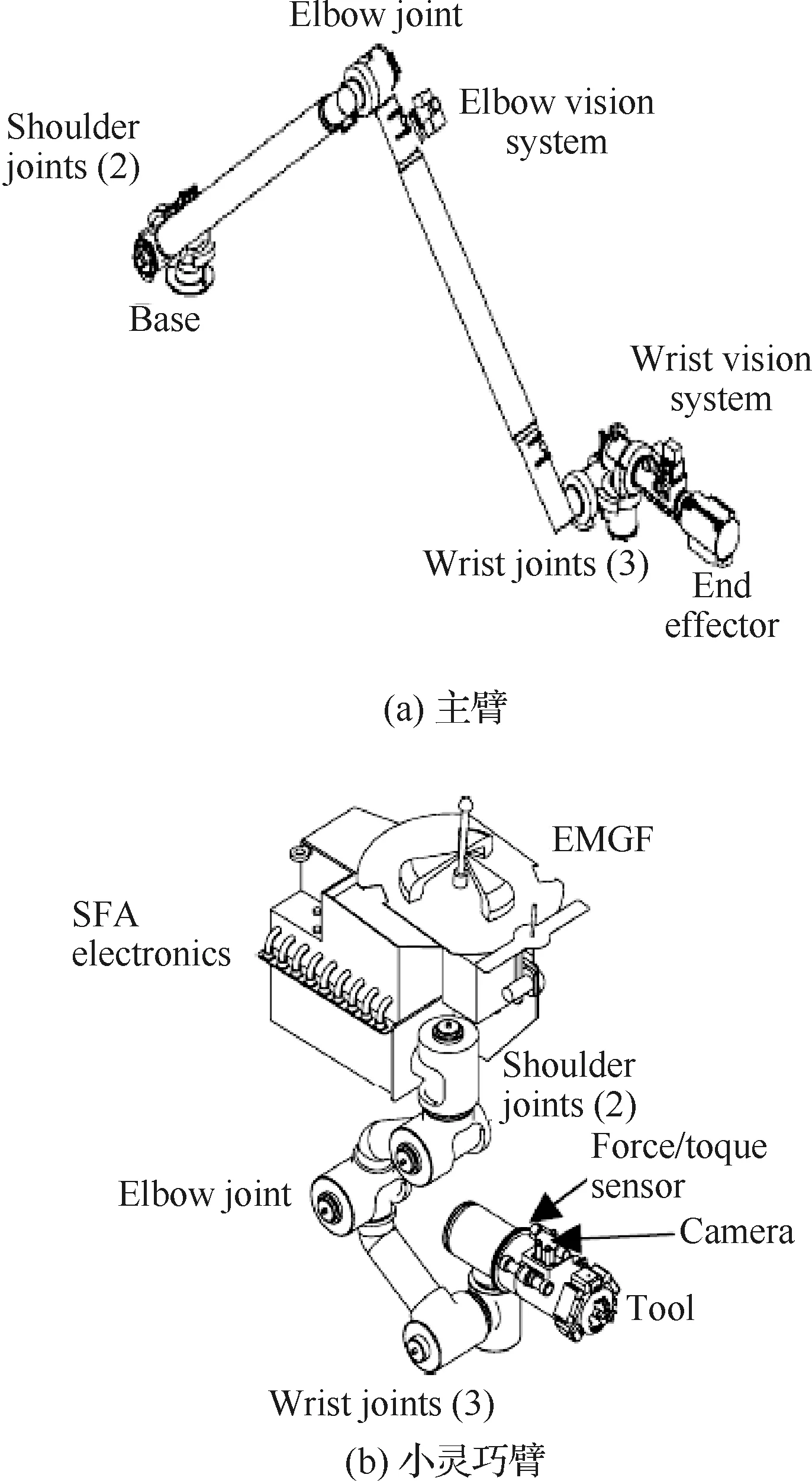
图5 日本JEMRMS[12]Fig.5 Japan JEMRMS[12]
针对载荷转移、载荷安装等空间作业任务,空间机械臂的系统控制技术需要综合考虑机械臂关节柔性[30]、关节摩擦[17]、臂杆柔性[23]、机械臂基座特性等对精细位置控制、柔顺控制、力控制的影响。
2.3 路径规划技术
路径规划技术考虑空间机械臂的环境布局、碰撞干涉、机械臂操作对基座反作用力/力矩限制、末端运动轨迹限制等多目标约束,规划出空间机械臂的安全无碰运动路径,保证系统任务安全可靠实施。根据载体航天器姿态控制情况,可以将空间机械臂的路径规划分为基座受控和自由漂浮2大类。基座受控的空间机械臂路径规划可直接利用地面机械臂路径规划的相关技术;而基座漂浮的空间机械臂路径规划需要综合考虑载体航天器的飞行任务约束与机械臂末端的任务目标之间的联系[31]。
为完成航天飞机返航前的隔热瓦状态检查,航天飞机机械臂SRMS与国际空间站姿态控制系统开展了机械臂转移航天飞机路径的联合设计以确保机械臂转移过程系统姿态可控[3],如图6所示。ETS-VII机械臂在轨验证了机械臂运动过程姿态扰动最小路径规划方法[32-33]。

图6 航天飞机轨道器维修机动[3]Fig.6 Shuttle orbiter repair maneuver[3]
由于空间机械臂操作范围大和操作精度要求高之间的矛盾,还有一类宏-微操作机械臂的路径规划技术在空间机械臂路径规划研究中也占有重要地位。国际空间站的SPDM安装在SSRMS末端,降低了SPDM基座刚度,对SPDM的精细位置控制产生了不利影响,需要SPDM在运动过程降低对基座的反作用力以实现自身末端运动轨迹和位置精度。部分学者提出采用增强扰动图法和零反作用机动思想开展了相关研究[34-38]。
路径规划技术有其工程任务背景,比如机械臂捕获大质量舱段后的运动会对基座飞行器的姿态控制产生不利影响,需要机械臂完成转移任务的同时降低对基座飞行器的扰动影响。需要关注的是,这些路径规划技术的研究对象大多数为冗余自由度机械臂,充分利用机械臂的冗余自由度实现多约束下的路径规划。
2.4 视觉感知技术
空间机械臂视觉感知技术利用安装在末端的手眼相机实现遥操作监控,以及对视场范围内特定目标进行识别,实时连续计算特定观测目标与机械臂之间高精度的相对位姿关系,用于机械臂视觉伺服控制或航天员操作判断。
目前已完成的空间机械臂在轨工程应用与技术试验验证采用在操作对象上安装合作标志器,如图7所示[39],视觉系统通过对合作标志器的测量获得机械臂与操作对象间的相对位置和姿态,引导机械臂完成操作任务。其难点是如何在空间复杂变化光照条件下均能将目标从背景中分离出来以实现正确的图像分割,以及如何在众多类似目标的区域中找的真正的目标区域完成目标识别都是空间非合作目标视觉测量,实现复杂光照条件下高鲁棒性目标识别与特征。

图7 空间机械臂的合作标志器[39]Fig.7 Cooperative targets for space manipulator[39]
针对非合作目标视觉测量,基于空间航天器的对接环、发动机喷嘴、太阳能帆板支架、螺栓孔等典型特征,基于全部或部分目标模型约束,研究不同特征组合条件下如何实现高精度位姿求解是空间非合作目标视觉测量要解决的一个关键技术。另外,传感器是视觉测量的硬件基础,既适应空间环境特点又能满足机械手操作需求的新型空间传感器是必须解决的关键技术。面向空间机械手操作的视觉感知硬件技术[39]。
目前,遥操作视觉监控和非合作目标视觉测量在理论与技术上相对成熟,模型已知和部分已知的非合作目标视觉测量正处于技术攻关阶段,而模型完全未知的非合作目标视觉测量尚处于探索阶段。
2.5 末端执行器技术
空间机械臂末端执行器分为专用任务手爪和通用任务手爪两类。专用任务手爪针对单一操作目标及特定任务,夹持能力强,自由度少,结构简单。通用手爪,例如仿人型手爪,自由度多,通用性强,具备灵巧操作能力,可以解决面向多物体、通用任务的操作问题。这两类手爪目前形成空间机械臂的两个发展方向。
空间机械臂在轨应用以专用任务手爪为主。航天飞机SRMS机械臂和国际空间站SSRMS机械臂的末端执行器原理相近,能够实现高刚度连接、大容差捕获、动目标捕获。SPDM的末端执行器是一个可更换末端工具的专用手爪,通过连接不同操作工具实现不同的末端功能,完成精细灵巧作业,如2014年利用4种不同工具实现了燃料补加试验RRM[5],如图8所示。ETS-VII机械臂是一个专用手爪,仅能完成与合作目标的捕获连接。机器人航天员R2采用仿人型通用手爪,在国际空间站舱内完成了在轨试验,主要包括:① 自 由空间任务:颈部运动、表演手语;② 接触任务:操作任务面板、使用空气流量计[7],如图9所示,其最大的特点是能够使用航天员的工具完成操作任务。

图8 燃料补加试验工具[5]Fig.8 Tools for robotic refueling mission[5]
从目前在轨任务来看,绝大多数空间机械臂采用专用任务手爪以保证任务的可靠性;一些舱内机械臂利用通用仿人型手爪,辅助航天员日常复杂操作,扩大载人航天的效益。

图9 国际空间站的机器人航天员R2[7]Fig.9 Robonaut R2 in International Space Station[7]
2.6 遥操作控制技术
目前空间机械臂主要通过遥操作控制方式来完成在轨任务,包括航天员在轨遥操作和任务专家地面遥操作两种方式。位于航天飞机或国际空间站的舱内航天员利用机器人操作台,可实现对舱外空间机械臂的在轨遥操作,适合于对实时性要求高的任务,缺点是导致航天员工作时间较长、精力消耗较大。比如,国际空间站航天员利用机器人操作台(图10所示),在轨遥操作控制SSRMS对悬浮的货运飞船HTV4进行捕获和辅助对接任务[40]。

图10 SSRMS机器人操作台[40]Fig.10 Robot work station of SSRMS[40]
在地面遥操作方式下,任务专家通过地面遥操作系统,利用天地通信链路,实现对空间机械臂的地面遥操作控制,可用于执行常规例行检查及大部分工程任务,大幅减轻航天员的工作负担。SSRMS早期仅能通过国际空间站舱内航天员在轨遥操作控制实现。然而,随着操作任务复杂度增加以及操作经验丰富,2005年加拿大航天局首次实现了SSRMS地面遥操作,从自由空间的小范围机动到不限制运动范围的联合关节运动[41]。此后,对于部分常规例行检查任务,SSRMS主要通过地面遥操作方式实现,减轻航天员工作负担。地面遥操作控制包括手动控制和自主控制两种模式[42-43]。在手动控制模式下,地面操作员通过手柄实现对机械臂的控制,然而天地之间信号传输时延对安全可靠的手动控制提出巨大挑战。在自主控制模式下,机械臂接收来自地面仿真验证后的预编程指令序列,在轨形成远端的闭合回路,将时延排除在天地控制回路之外,避免了通信时延带来的影响。
ROKVISS使用专用通讯方式,仅当国际空间站经过德国上空时,才进行遥操作控制,时延小于20 ms,实现了高逼真度的主从力反馈遥操作控制,完成了曲面跟踪、拉弹簧等试验[44],如图11所示。但是,操作窗口时间不能超过7 min,因此无法完成复杂任务。

图11 ROKVISS遥操作系统[44]Fig.11 Teleoperation system of ROKVISS[44]
从目前操作方式来看,空间机械臂通常采用在轨遥操作与地面遥操作相结合方式,实际应用时以地面遥操作为主,主要通过预编程指令序列的自主控制模式实现[45]。随着主从遥操作、力反馈等技术进一步成熟,具有高度临场感的手动控制模式可用于机械臂的实时主从遥操作,解决空间动态复杂不确定任务作业的操作难题。
2.7 地面试验验证技术
受到关节输出力矩限制,空间机械臂难以在地面重力环境下实现三维空间内的自由运动。因此,如何在地面重力环境下模拟空间机械臂在微重力环境下运动对在轨任务验证至关重要。通常采用全物理、半物理和全数字相结合方式,综合实现空间机械臂地面验证以覆盖在轨任务。
空间机械臂地面全物理试验系统主要包括气浮式、水浮式、飞机抛物线飞行或落塔式和吊丝配重式系统[46]。SRMS采用气浮式地面试验系统,主要用于验证数学模型的正确性,其局限性为只能验证机械臂在二维平面内的运动特性[47],如图12所示。水浮式试验系统一般用于航天员操作训练[48],如图13所示,由于流体阻力等因素导致机械臂试验验证很少采用。飞机抛物线飞行或落塔试验系统产生微重力的时间较短,国内外机械臂地面试验极少采用。吊丝配重试验系统的响应速率需要比机械臂高至少一个量级[49-50],且易产生安全隐患,目前机械臂地面试验也基本较少采用。目前较为流行的是采用半物理验证方法,即机械臂接触捕获环节采用物理实物产品、其他机械臂运动特性采用数字仿真,这样利用计算机实现机械臂三维运动学、动力学验证的同时,较难仿真的接触动力学采用物理产品真实验证,最大程度的综合了物理验证和数学验证的优点[51]。目前SPDM就是采用半物理方法开展地面试验验证的[52],如图14所示,这也是未来机械臂地面验证技术发展的趋势。

图12 SRMS气浮试验平台[47]Fig.12 Air bearing experimental platform for SRMS[47]

图13 Ranger中性浮力模拟器[48]Fig.13 Neutral buoyancy simulator for Ranger[48]

图14 SPDM任务验证系统[52]Fig.14 Task verification system for SPDM[52]
3 中国空间机械臂发展概况
中国空间机械臂研究相比国外起步较晚,已开展了在轨捕获、在轨维修等关键技术验证试验,中国空间站机械臂正处于研制阶段。
3.1 试验七号空间机械臂
哈尔滨工业大学在国家“863”计划支持下开展了空间机械臂研究,所研制的试验七号空间机械臂采用6个旋转关节,分别是旋转-俯仰-俯仰-旋转-俯仰-旋转,样机如图15所示[53]。机械臂由6个完全相同的机电集成式空间智能旋转关节构成,关节集成了力矩传感器、关节位置传感器、电机位置传感器和温度传感器。整个机械臂的设计充分体现了模块化概念,缩短了设计周期,降低了研发成本。机械臂的末端安装了三指形末端夹持器,能够完成对合作目标的有效捕获和精确定位[54-55]。2013年7月20日,中国在太原卫星发射中心用“长征四号丙”运载火箭,成功将试验七号试验卫星发射升空,进行了一系列空间机械臂在轨捕获与操作等空间维护技术科学试验,获得了重要的试验数据[56],突破了空间机械臂在轨捕获等关键技术。

图15 试验7号空间机械臂样机[53]Fig.15 Space manipulator of SY-7[53]
3.2 天宫二号空间机械臂
从中国载人航天和空间机械臂发展的角度出发,为验证和评价空间机械臂关键技术、为空间机械臂辅助航天员开展在轨维修积累经验,哈尔滨工业大学等单位开展了天宫二号空间机械臂在轨维修的论证和研制工作[57-58]。
根据在轨维修试验和技术验证需求,通过系统任务规划,天宫二号空间实验室搭载了机械臂、机械手、手眼相机、控制器、全局相机、模拟维修单机等设备。模拟维修单机提供了机械臂在轨操作的各试验对象,包括电连接器、多层、螺钉和电动工具的固定装置。机械臂控制器是机械臂操作终端的信息中枢,接收指令控制机械臂操作终端动作,同时存储机械臂控制器收集的机械臂、机械手、手眼相机和全局相机等传感器数据,如图16所示。
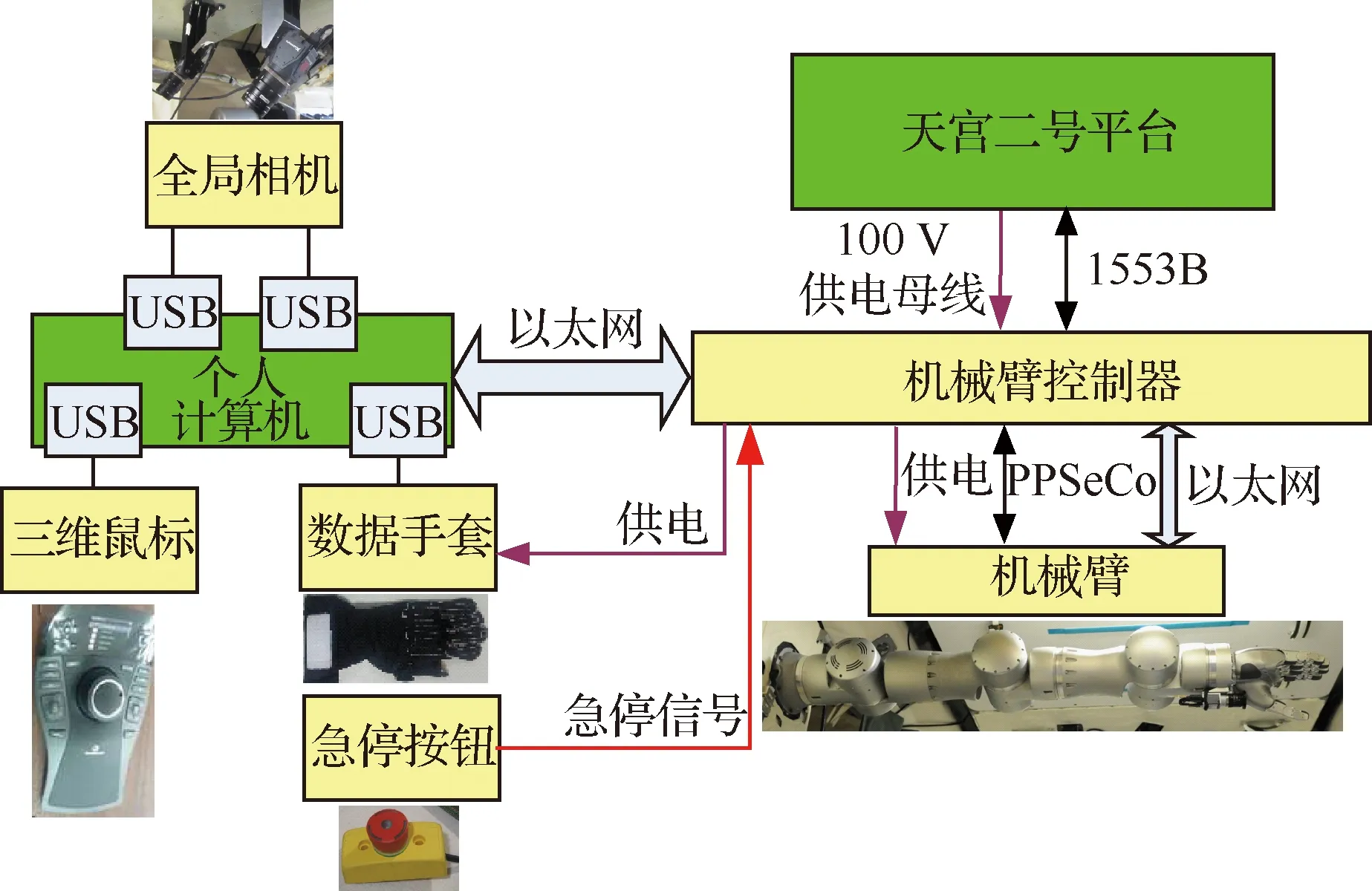
图16 天宫二号空间机械臂系统Fig.16 Space manipulator system of TG-2
2016年10月至11月,在神舟十一号载人飞船停靠天宫二号空间实验室的组合体期间,空间实验室系统成功完成了机械臂操作终端的人机协同在轨维修技术试验任务,圆满完成了在轨辨识、招手、抓小球测试试验,并针对一台单机的维修任务、成功实现旋拧电连接器、撕多层、旋拧螺钉维修试验项目,如图17所示。

图17 天宫二号空间机械臂试验Fig.17 Space manipulator experiments of TG-2
通过人机协同在轨维修技术试验,充分验证了通过合理的人机协同任务规划,采用基于视觉测量修正、视觉伺服闭环定位结合机械臂柔顺控制的操控策略,控制仿人型灵巧手可完成航天器维修旋拧紧固件、插拔电连接器和撕开多层等主要任务。此外,针对精细操作机械臂关节摩擦与刚度的模型和参数进行了在轨辨识,积累了宝贵的在轨数据。
天宫二号空间机械臂在轨维修试验作为中国载人航天的空间机械臂在轨服务的首次在轨试验,其成功实施将为中国后续空间站机械臂的研制和应用积累一定的经验和在轨数据。
3.3 中国空间站机械臂
中国载人航天工程进入第三阶段,将在2022年前后完成中国空间站建造并开始运营,空间站机械臂是中国空间站建造、运营、维修及拓展等任务的关键装备之一[59]。中国空间站机械臂由核心舱机械臂和实验舱机械臂组成。两个机械臂可独立或协同工作,也可组合为一个机械臂,扩大作业范围。空间机械臂可完成舱段捕获、转移、设备安装、维修、更换、载荷操作、航天员辅助转移及舱外状态监视等任务。
核心舱机械臂的任务包括舱段转移、设备安装、维修更换、辅助航天员转移及舱外状态监视等。核心舱机械臂由舱内部分和舱外部分构成:①舱内部分由机械臂操作台和空间站为机械臂提供的接口组成,为机械臂提供电源、数据、指令、操作控制的保障; ②舱外部分主要指机械臂本体,包括7个关节、2个末端执行器、2个臂杆、1个中央控制器及1套视觉系统组成。机械臂呈对称结构,可在空间站舱外表面实现肩、腕互换的位置转移,即“爬行”[60-61]。
实验舱机械臂的主要任务包括载荷照料、支持航天员舱外活动(Extra-Vehicular Activity, EVA)及舱外状态检查。载荷照料是由机械臂进行载荷的出舱、安装、照料、拆卸和回收等操作。支持航天员EVA是由机械臂进行航天员的舱外转移、任务作业等操作。舱外状态检查利用机械臂末端的相机对空间站舱体表面进行状态检查。
实验舱机械臂由7个关节、2个末端作用器、2个臂杆、控制器、2套手眼相机、肘部相机等组成,如图18所示。机械臂采用7自由度对称构型,两端各配置1个末端作用器。其中,一个末端作用器用于实验舱机械臂与实验舱的连接,作为实验舱机械臂工作的基座;另一个末端作用器作为手臂抓捕操作的工具,也可实现与核心舱机械臂的对接,以构成更长的组合机械臂。实验舱机械臂控制器安装在臂杆上,随机械臂移动[62]。
关节是实验舱机械臂的核心功能部件,主要由谐波减速器、电机及驱动组件、关节端力矩传感器、关节输出端位置传感器、关节制动器及关节控制器等组成。关节除了实现机械臂运动所需的力矩、速度、精度、工作范围等主要技术指标外,还需具备:① 标准通用可在轨更换的机电接口,实现关节与关节、关节与臂杆、关节与末端作用器之间的机电连接,构成整个机械臂系统;② 控制和驱动关节电机,按照中央控制器的指令实现位姿精度移动末端作用器至指定的位姿;③ 采集关节的参数信息,反馈至中央控制器闭环控制和下行地面;④ 对关节实施主动温度控制;⑤ 具备航天员手动驱动能力;⑥ 支持关节模块在轨更换维修;⑦ 实现机械臂系统内部电源、通信、图像的电缆传输。
末端作用器实现实验舱机械臂的捕获操作功能。实验舱机械臂末端作用器采用三爪式捕获锁紧机构,在圆周上均布3个捕获手指、3个锁紧手指以及与臂杆的连接接口。末端作用器的外壳上安装手眼相机、航天员脚限位器接口。末端作用器处理满足位姿容差、预紧、抓取等主要功能要求外,还具备:① 标准通用可在轨更换的机电接口实现与关节的机电连接构成整个机械臂;② 控制和驱动电机,按照中央控制器指令实现对目标的捕获操作;③ 实现末端作用器与捕获接口之间的刚性连接,提供整臂足够的连接刚度;④ 采集末端作用器的参数信息,反馈至中央控制器闭环控制和下行地面;⑤ 对末端作用器实施主动温度控制;⑥ 具备航天员手动驱动能力;⑦ 支持末端作用器模块在轨更换维修;⑧ 实现机械臂系统内部电源、通信、图像的电缆传输。
控制器是实验舱机械臂系统的控制和信息的中枢,由处理器模块、容错模块、电源管理模块、总线模块组成,主要实现实验舱机械臂控制、信息和电源管理功能,主要负责实验舱机械臂的路径规划、整臂控制、碰撞检测,并能够实现与空间站平台或者核心舱机械臂的通信。
实验舱机械臂可通过地面操作和在轨操作进行操作。① 地面操作:地面通过指令控制机械臂按预先设定动作执行操作任务,地面根据遥测和航天员的反馈确认在轨试验状态,称之为自主操作模式。另外,地面还可以对机械臂进行手动遥操作。在高度逼真的三维可视化场景及下行图像和遥测数据辅助下,利用在线模型修正与预测仿真技术对机械臂状态进行预测,消除或减轻通讯时延对操作的影响。② 在轨操作:航天员通过舱内操作平台对机械臂进行在轨操作。机械臂的运动指令通过机械臂专用总线转发至实验舱机械臂中央控制器,由中央控制器发送至关节控制器、末端控制器等终端设备执行。实验舱机械臂的中央控制器负责收集机械臂内遥测数据,并发送至在轨操作平台供航天员观察。
4 问题与建议
通过对国内外空间机械臂发展现状及关键技术分析,目前空间机械臂技术存在以下问题:
1) 空间机械臂的柔性环节影响高性能运动控制。空间机械臂通常采用的谐波传动、关节力矩传感器、长臂杆给系统引入了柔性环节,属于典型的刚柔耦合非线性系统,整个系统的控制特性与动力学特性之间存在复杂的相互耦合关系,对其高性能运动控制提出了挑战。因此,如何深入分析柔性环节影响,设计行之有效的控制器,减小机械臂在操作过程中产生的振动,实现高性能的运动控制,是需要解决的难题。目前,航天飞机SRMS机械臂、国际空间站SSRMS通过降低机械臂运动速度和模态分析避免激励机械臂的柔性振动,尚需要进一步研究其柔性行为特征,从而提高空间机械臂的控制性能。
2) 空间机械臂在轨工作环境地面不能准确模拟。机械臂气浮式地面二维平面全物理验证和局部硬件在环半物理验证的建设成本高、验证周期长,而且难以准确模拟空间机械臂在轨工作的微重力、复杂光照等环境。因此,在轨任务应用的机械臂模型和控制参数仍需要根据实际在轨条件进行调整。特别是针对一些精细操作任务,机械臂的关节摩擦特性、机械臂载体特性受天地重力差异影响较大,将进一步影响机械臂的系统性能,从而影响机械臂操作任务的可靠性。
3) 空间机械臂非合作目标识别与测量、非合作目标捕获等技术尚未开展技术验证和工程化应用。目前国内外空间机械臂绝大多数采用合作靶标、合作捕获接口实现被操作对象的识别、相对位姿测量和目标捕获。这些特殊设计要求增加了空间飞行器在轨可维护设计的资源开销、限制了空间机械臂在轨维护操作的应用范围。因此,开展非合作目标识别与测量、非合作目标捕获等技术的在轨验证,对空间机械臂在轨服务技术实现更加广泛的工程应用具有重要意义。
针对中国空间机械臂的发展现状,对中国未来空间机械臂发展提出以下建议:
1) 开展空间机械臂柔性行为控制的基础科学问题研究。未来空间机械臂任务将面临操作空间范围更大、末端负载质量特性更大、精度要求更高的特点,这导致机械臂的柔性更为明显,这些因素将对机械臂的精细控制带来更大的挑战。如何规划最优的运动轨迹、寻找优化的控制策略实现空间机械臂的稳态精度高、动态精度好、对基座的扰动力矩小等目标,需要进一步研究。
2) 开展空间机械臂天地差异条件下的性能影响分析与控制技术研究。基于在轨/地面试验数据,开展空间机械臂在天地环境差异条件下的性能影响分析,掌握空间机械臂关键指标如末端精度、柔顺特性等天地差异,进而提出相应的控制策略。相关分析成果和控制技术有助于后续空间机械臂的在轨应用和地面试验分析。
3) 开展机械臂在轨服务技术与航天器在轨可维护设计技术的交叉研究。机械臂在轨服务技术和航天器在轨可维护设计是实现航天器在轨自主维护的两个重要方面,两者技术的发展相辅相成。中国现有的航天器考虑可维护设计较少,考虑接受机械臂维护的设计则更少,从长远来看非但不能享受在轨维护技术的先进成果,反而限制了该技术的发展。因此,机械臂在轨维护技术与航天器可维护设计技术需要交叉进行研究,提升中国航天器可维护能力和维护水平,降低在轨服务的难度、费用和风险。
4) 开展基于中国空间站平台的空间机械臂技术在轨试验项目规划。国外绝大多数空间机械臂技术都在国际空间站或航天飞机上开展,如早期的ROTEX、ROKVISS,近期的机器人航天员R2和SPDM的RRM,取得了大量的研究成果和在轨试验数据。中国空间站目前处于研制阶段,有必要适时、合理地规划基于中国空间站平台的空间机械臂技术在轨试验项目,进一步促进中国空间机械臂技术的发展。