悬吊式微低重力环境模拟技术研究现状与展望
2021-03-28高海波牛福亮刘振于海涛李楠
高海波,牛福亮,刘振,于海涛,李楠
哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001
微低重力环境包括在环星球轨道上近似为零的微重力环境以及在星球表面低于地球表面重力的低重力环境。处在微低重力环境中的航天器或宇航员的受力状态与动力学特性明显不同于在地球重力环境下。较小的重力使得航天器在有限的运载火箭发射载荷能力下可采用相较于地面强度、刚度更弱的结构件和驱动能力更小的驱动部件,从而为部署更多的其他器件提供空间。但这会导致在地球重力下这些航天器很轻易发生变形损坏,无法正常放置和进行相关测试实验。微低重力使得宇航员能够付出更少的肌肉力量来完成维修操作和搬运任务等。但这使得宇航员在太空中的“体感”与地球重力环境下大大不同,在地面进行的操作训练对太空任务执行的指导意义大打折扣[1-2]。
为了解决上述问题,需要研制一种在地面使用的能够模拟太空微低重力环境的系统,使得部署其中的航天器能够在地面进行发射前的测试实验,宇航员能够在地面开展太空任务模拟训练。为航天任务的顺利开展提供充足的实验验证与较高的可靠性[3-5]。
在地面模拟太空微低重力环境的研究和应用由来已久且研究成果较多,例如美国、苏联等国家从20世纪60年代开始设计过多种针对月球车、宇航员等应用的微低重力模拟系统。按照模拟原理的不同可以分为落塔法、抛物飞行法、水浮法、气浮法、悬吊法、外骨骼法和机械臂托举法。对这些方法的横向对比如表1所示。

表1 各种微低重力模拟方法的对比Table 1 Comparison of various micro-low gravity simulation methods
综合分析,悬吊法综合优势最大,目前研究成果也最多。随着针对其控制策略研究的发展,悬吊式微低重力模拟精度越来越高,使得该方法被越来越多地应用于微低重力模拟场合。本文的综述内容主要围绕悬吊法的研究现状、主要研究问题、关键技术和未来发展趋势展开。
1 悬吊式微低重力模拟系统研究现状
目前国内外存在很多悬吊式微低重力模拟系统的研究成果,在航天器和宇航员上都有应用,并且方案构型形式多样。下面从国内外2个角度对一些典型的悬吊式微低重力模拟系统的研究成果进行研究现状的综述。
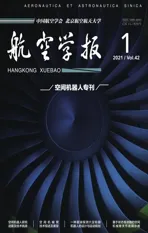
1.1 国外研究现状
国外的悬吊式微低重力模拟系统以NASA的研究成果最多,按照直接提供重力补偿力的子系统中是否含有电机、电缸等主动驱动器件将研究成果分为被动式和主动式两类。
1)被动悬吊式微低重力模拟系统
被动的微低重力模拟一般采用固定长度吊索直接悬吊、配重式悬吊和弹簧式悬吊3种。相关研究成果的原理介绍和性能对比列在表2中。

表2 国外被动悬吊式微低重力模拟系统对比Table 2 Comparison of foreign passive-suspended micro-low gravity simulation systems

续表
2)主动悬吊式微低重力模拟系统
主动悬吊式微低重力模拟系统中电机、电缸的控制闭环使得系统可以实现较高的微低重力模拟精度与足够的快速性。目前主要研究成果的原理介绍和性能对比分析如表3所示。
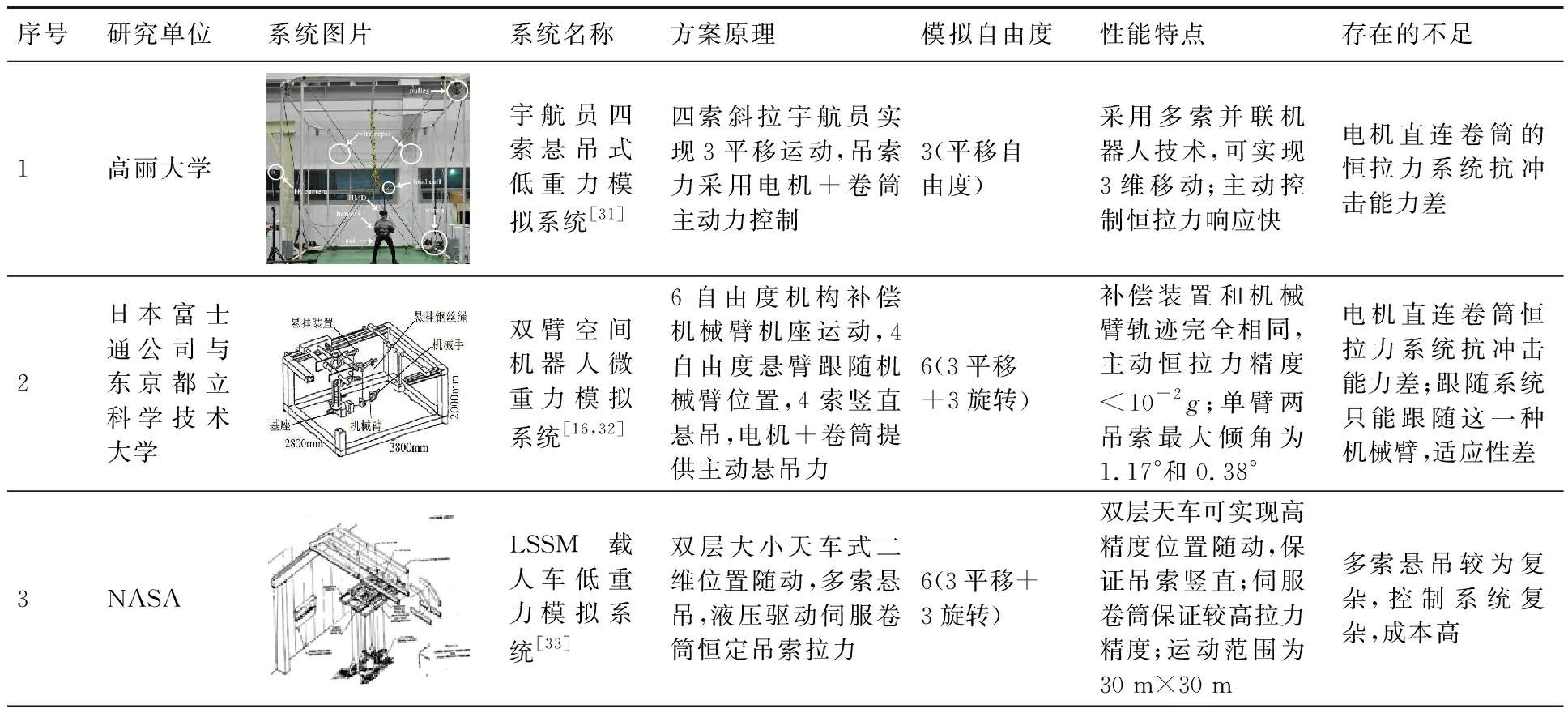
表3 国外主动悬吊式微低重力模拟系统对比Table 3 Comparison of foreign active-suspended micro-low gravity simulation systems

续表
1.2 国内研究现状
国内的悬吊式微低重力模拟系统研究成果主要集中在航天器的微低重力模拟方面。同样将研究成果分为被动式和主动式2类进行综述。
1)被动悬吊式微低重力模拟系统
国内的被动悬吊式也主要采用简单的固定长度吊索悬吊,配重悬吊或弹簧悬吊。目前主要研究成果的原理介绍和性能对比如表4所示。

续表
2)主动悬吊式微低重力模拟系统
国内的主动悬吊式微低重力模拟系统研究成果较多,相比被动式模拟实现了更高的微低重力模拟精度,目前主要研究成果的原理介绍和性能对比如表5所示。

表5 国内主动悬吊式微低重力模拟系统对比Table 5 Comparison of domestic active-suspended micro-low gravity simulation systems

续表
1.3 按微低重力模拟原理总结的研究成果
1.1节和1.2节对现有的研究成果进行了被动式和主动式的分类并做了详细的介绍。从微低重力模拟原理和现有成果的性能特征角度综合分析,对每一个大类进行更详细的分类并总结各类具有的优势和不足,如表6所示。

表6 按微低重力模拟原理总结的研究成果Table 6 Summary of research results according to principle of micro-low gravity simulation
2 悬吊式微低重力模拟的共性研究问题及关键技术
悬吊式系统绝大部分采用竖直单索悬吊,因此本文主要对这类系统进行讨论。悬吊式微低重力模拟系统满足以下2条设计准则:
1) 吊索补偿力恒等于被吊对象全部或部分重力,分别对应微重力和低重力模拟。
2) 吊索补偿力方向与重力方向相反,即吊索要竖直,补偿力的水平分量尽可能为0。
第1条准则保证了竖直方向微低重力模拟需求,相关子系统称为恒拉力子系统,提供恒定吊索力及竖直位移。第2条保证了水平方向微低重力模拟需求,相关子系统为二维位置随动子系统与目标位姿采集子系统,提供吊索竖直及水平位移。分析这2条设计准则和现有研究成果的构型方案,可以归纳出目前在悬吊式微低重力模拟系统研究中存在的3个共性问题:
1) 如何设计同时满足高带宽和高抗扰需求的恒拉力子系统
控制系统的快速性决定了电机对吊索力扰动的抑制能力,带宽越高,快速性越好。高负载情况下实现高动态性能对电机提出了较高的要求。同时吊索力容易有冲击突变,通常需要引入可等效为低通滤波器的弹性环节对力冲击进行抑制,降低吊索力误差,但同时也降低了系统带宽,并且使系统变成带有柔性环节的欠驱动系统。高带宽和高抗扰成为一对矛盾需要折中处理,算法的设计也变得复杂。该算法类似于柔性关节机械臂进行人机交互的柔顺控制。此处对应第1个关键技术:宽频带高抗扰恒拉力技术。
2) 在3个平移自由度方向如何同时消除力误差和力误差积分产生的累积速度误差
在低重力模拟工况下被吊对象大部分时间接触地,由于地面支持力的实时变化会消除竖直力误差的累积和水平干扰力误差的累积,因此控制算法只需消除3个平移自由度方向的当前力误差即可。但是在微重力模拟工况下,被吊对象漂浮时3个平移自由度方向的力误差会累积从而产生被吊对象的速度误差。因此在控制算法上需要同时消除力误差与力误差积分产生的累积速度误差。在实际操作中容易遇到积分器长时间开启产生发散,引起系统不稳定的问题。除此之外,竖直方向存在弹性环节,水平方向存在长吊索,即3个平移方向都是欠驱动。双控制目标、欠驱动让控制算法设计变得复杂。这是目前该系统急需解决的一个问题。此处对应第2个关键技术:低力误差与力误差积分控制技术。
3) 如何设计同时满足高速、高精度、大范围测量需求的目标位姿采集子系统
采集到的吊索倾角或目标位姿信息作为二维位置随动子系统的反馈通道作用十分重要。目前的技术背景下,高速(>500 Hz)、高精度(<0.01°或<1 mm)、大范围(>2 m×2 m×2 m)三指标同时满足实时位姿采集是一个技术难点,通常需要优先满足最关键指标而对另外的指标做出让步,这无疑会降低系统的位置随动性能和水平方向微低重力模拟真实度。此处对应第3个关键技术:目标位姿高速高精度大范围采集技术。
3 悬吊式微低重力模拟关键技术研究现状
3.1 宽频带高抗扰恒拉力技术
此类恒拉力技术主要针对刚性驱动+弹性缓冲悬吊式微低重力模拟系统讨论。此类系统的研究成果较多,除了在悬吊式微低重力模拟领域之外,在康复机械等领域也有应用。刚性驱动主要实现高频带特性,通常为电机、电动缸、气缸等,目前高端器件能够实现很高的带宽,因此此类系统主要的性能约束产生在弹性缓冲环节,下面根据弹性缓冲实现方式的不同将此类恒拉力系统分为3类进行具体综述。
3.1.1 驱动部件+被动弹性元件式恒拉力系统
驱动部件+被动弹性元件式是最简单的恒拉力方式。被动弹性元件主要为弹簧、气缸里的空气和一些特殊设计的弹性体。这一类系统在现有的悬吊式微低重力模拟系统中应用较多,具体构型和实例如表7所示。
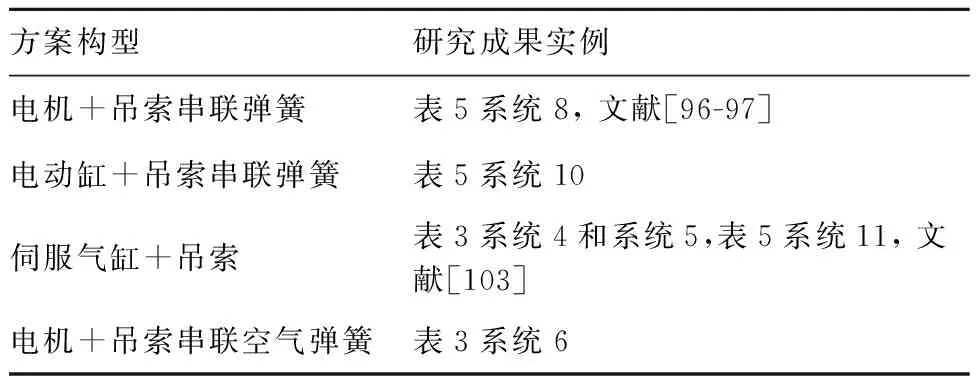
表7 驱动部件+被动弹性元件式系统构型及实例
这类系统构型原理简单,但是当存在冲击载荷时,吊索力发生突变,电机无法瞬间响应,此时的吊索力扰动完全靠被动弹性元件抑制。力误差值直接受被动弹性元件刚度影响,刚度越低,吊索力误差越小。由于这些弹性元件刚度无法做到很低,所以冲击载荷下的力误差值无法抑制到很小。这个弊端在后面2类系统中得到了改善。
3.1.2 驱动部件+主动弹性元件式恒拉力系统
被动弹性元件刚度受限的问题可以通过为弹性元件增加主动驱动源来改善,即通过主动驱动来调节弹性元件的变形,从而能够降低一定刚度并提供更好的扰动抑制能力。表5系统9采用的即为该方法,原理如图1所示[98]。卷扬电机负责吊索大的竖直位移,电动推杆+缓冲弹簧构成了一个主动弹性元件,负责吊索力的恒定控制。

图1 月球巡视器低重力模拟系统中恒力悬吊原理图[98]Fig.1 Principle diagram of constant force suspension in low gravity simulation system of lunar patrol device[98]
同样原理的恒拉力方案也应用在2个有关康复系统的研究成果中:苏黎世联邦理工学院的Frey等[104]研制的体重支撑系统,如图2所示;南开大学的杨卓等[105-106]研制的主动式体重支撑系统,其中采用的恒拉力系统如图3所示。

图2 苏黎世联邦理工学院人体体重支撑系统[104]Fig.2 Human body weight support system of Swiss Federal Institute of Technology Zurich [104]

图3 南开大学研制的恒拉力系统[106]Fig.3 Constant force system of Nankai University[106]
图1~图3的恒拉力系统能够实现较高的拉力精度,但是在出现冲击扰动时,首先也是弹性元件被压缩,然后其驱动源才去调节,虽然相比完全被动有了改善,但还是存在改进的空间。同时双驱动部件也增加了成本和复杂性。
3.1.3 驱动部件+恒拉力机构(或低刚度机构)式恒拉力系统
为了进一步降低吊索刚度实现更小的拉力误差,一部分研究成果设计了特殊的不含驱动源的恒拉力机构(或低刚度机构)来代替普通的被动弹簧。恒拉力机构即为一类能够在一定的输出行程内保持输出力基本恒定的机构。相较于普通弹性元件,其在高载荷,大位移下能保持更低的刚度,因此对吊索力误差的抑制效果更好。
哈尔滨工业大学在表5系统6和7中采用了一种旁路张紧式恒拉力机构,如图4所示。构型为一个拉簧从侧面拉动特殊长度的摆杆,摆杆上的滑轮对吊索施加作用力,在摆杆上下摆动的特定行程内,弹簧张紧力在与吊索平行的竖直方向上的分量始终恒定。从而为吊索提供了恒力的缓冲。

图4 哈尔滨工业大学研制的旁路张紧式恒拉力机构Fig.4 Bypass tension constant-force mechanism developed by Harbin Institute of Technology
目前该研究团队针对宇航员悬吊的宽频带需求,设计了如图5所示的串联张紧式恒拉力系统[107-109]。在力矩电机和卷筒之间串联恒拉力机构。该机构采用正负刚度叠加的原理,径向布置的压簧在零位附近提供负刚度,轴线处布置的扭杆弹簧提供正刚度,叠加的结果为低刚度,可调至0刚度即恒力输出从而抑制吊索力扰动。
上面介绍的2种恒拉力机构是目前应用在悬吊式系统中的实例。在其他领域恒拉力机构的应用也十分广泛,Wang和Xu[110]对恒力机构设计和建模的最新发展进行了调查,并将其分为柔性恒力机构和常规恒力机构。前者依靠拓扑优化得到的柔性构件的弹性变形来实现恒力输出;后者则基于刚性结构和弹性元件的特殊组合实现恒力输出。考虑悬吊式恒拉力系统需要具有较大承载能力,可调性和可互换性,因此采用常规恒力机构更适用。这类机构按照采用的组件的不同主要分为依靠特殊布置的弹簧实现恒力输出的纯弹簧式恒力机构[108]和依靠特殊设计轮廓的凸轮实现恒力输出的弹簧-凸轮式恒力机构[111-113]。

图5 哈尔滨工业大学研制的串联张紧式恒拉力系统[108]Fig.5 Cascaded tension constant-force system developed by Harbin Institute of Technology[108]
3.2 低力误差与力误差积分控制技术
在目前的悬吊式微低重力模拟系统研究成果中,大部分的研究只是消除3个平移自由度方向的力误差,例如模糊PID控制[78]、积分型滑模变结构控制[114]和基于小脑模型的控制[115]等。考虑力误差积分消除控制的研究成果很少,仅查阅到的有针对水平干扰力消除的PID控制[116-117]和滑模控制[91,118]。在相近的领域,德国宇航中心的学者利用无源控制的思想对卫星的微重力进行模拟[20,119],其没有直接对力误差积分进行消除而是让卫星保持在无源状态,消除了模拟系统和重力对卫星的能量注入,从而保证了稳定并间接消除了力误差。下面对这3种方法进行详细的综述。
3.2.1 PID控制
在对二维位置随动控制的研究中,邹胜宇等[116-117]对吊索倾角的消除进行了研究。假设吊索力F控制得很好,F=mg,m为被吊对象质量。吊索倾斜θ角度,此时产生的水平干扰力Fd为
Fd=mgsinθ
(1)
从时刻t0到时刻te,干扰力的冲量对被吊对象产生了一个干扰动量mΔv,可得
(2)
在实际的过程中吊索倾角θ较小,因此式(2)可以简化为

(3)
因此为了使得水平干扰力产生的累积速度误差为0,应该让式(3)为0,即

(4)
即倾角的积分为0,式(4)即为力误差积分为0在水平位置随动控制中的体现。为了保持吊索铅锤,还应该包含力误差为0,即式(1)为0,体现为
θ=0°
(5)
跟随结束进入稳态时,倾角的角速度也为0 (°)/s,即

(6)
式(4)~式(6)即为实现水平随动控制的控制律,分别对应倾角的积分、比例、微分控制,即PID控制。其可以满足力误差和力误差积分的消除需求。在实际的仿真中,也验证了PID控制器的有效性。实际实验中,应对不同的激励扰动,固定参数PID的表现仍需再测试,结合自适应控制律调节PID参数能提高系统性能。
3.2.2 滑模控制
同样是在对二维随动控制的研究中,高扬等[91,118]在式(4)~式(6)的基础上,用滑模控制实现积分、比例、微分项的同时消除。其设计的滑模函数为
(7)
式中:c1与c2为常数;s代表滑模面。系统状态收敛到滑模面时可以满足倾角的积分、比例、微分均为0,即满足了微低重力模拟需求。采用带指数项的切换控制器可满足快速收敛,令式(7)的导数为0可以导出等效控制律,叠加指数收敛控制器即可得到最终控制律。并且通过构造李雅普诺夫函数可以证明稳定性。该方法在仿真和实验中也取得了较好的效果。但是也存在滑模控制常出现的抖振问题。通过用饱和函数替代不连续切换函数能够削弱抖振的影响。
3.2.3 无源控制
德国宇航中心De Stefano等[20,119]在用工业机械臂模拟卫星微重力的实验系统中采用了无源控制中的时域无源控制方法(TDPA法),着重解决时延和离散积分带来的系统无源性破坏从而不稳定的问题。类似于其解决离散积分发散问题的思路,悬吊式系统也可以设计无源观测器观测系统能量变化,当检测到被吊对象动能的增加大于除吊索力之外的干扰力对被动对象做的功时,说明悬吊式系统对被动对象输入了能量,被吊对象与外界的动力学接触过程不再是无源的,因此会产生失稳。无源条件可以设计为
(8)
式中:Eobsv为无源观测器检测到的能量;v0和v分别为初始时刻和当前时刻的速度;Fout为作用在被吊质量m上的外力。当检测到无源观测器Eobsv值大于0时,用TDPA法中的无源控制器对系统的反馈力或速度指令进行修正,原理为串联或并联一个可调电阻去消耗掉增加的能量,从而保证动力学接触过程无源,进而保证系统稳定。微低重力模拟对应于无源观测器Eobsv=0,即无损系统,外力做功完全转化为被吊对象动能变化,间接说明了吊索力与重力对被吊对象做的功刚好抵消,即实现了微低重力模拟,间接实现了力误差和力积分误差的消除。
除了TDPA方法,直接采用无源控制中较为普遍的能量成型和阻尼注入方法也可以保证系统的无源性[120-121],进而保证稳定和力误差积分的消除。该方法没有直接应用于微低重力模拟中的成果,但是具有很好的借鉴意义。无源控制方法有很强的物理直观性,其存储函数可以直接作为李雅普诺夫函数来证明系统的稳定性,因此可以基于此进行控制算法的设计。
3.3 目标位姿高速高精度大范围采集技术
在微低重力模拟中对目标位姿的测量主要是水平2个平移自由度的测量。个别的系统也进行旋转自由度的测量,如表5系统7所示的空间站机械臂微重力模拟系统。目标位姿采集技术存在较多研究成果,但是通常只能满足高速、高精度和大范围3个指标中的部分指标。下面对现有研究成果进行综述。
3.3.1 基于相机视觉的目标位姿采集技术
利用工业相机直接对被吊对象进行目标位姿采集是一种常用的方法。相机可以用单目也可以双目,采用双目冗余设计可提高可靠性。双目相机视觉目标位姿采集的原理是采用相机成像并对图像进行处理从而得到靶标点的空间6自由度位姿信息,如图6所示。在悬吊式系统应用实例有文献[66],表5系统6和7。该方案空间测量精度较高(0.1 mm),空间范围大(单相机标记范围距离可达30 m)。缺点是采集速度较低(250 Hz左右),且需要依赖于其自带软件,这对于将数据衔接入实时控制系统有一定难度。实时图像后处理速度限制了采集速度的提高。

图6 双目视觉吊索倾角采集方案Fig.6 Binocular vision sling inclination acquisition scheme
3.3.2 基于编码器或倾角仪的目标位姿采集技术
基于编码器的目标位姿采集技术测量吊索倾角的原理如图7所示。在2个正交的方向放置摆杆和旋转编码器,当吊索发生倾斜时,摆杆驱动旋转编码器转动从而得到吊索倾角信息。该方法在悬吊式系统中应用较多,如表5系统5和系统7,南开大学研制的恒拉力系统[106]。此方案的优点是原理构型简单,采集速度较高(1 kHz以上),测量范围大(±180°),成本低。缺点是吊索和摆杆间存在正反向间隙,导致正反向测量误差,并且只能测量2个自由度的旋转信息。
类似于双编码器的测量原理,可以采用倾角仪布置在安装于吊索上的一个平台上采集吊索的倾角,也能实现高精度、大范围的测量。但倾角仪的测量速率一般在200 Hz左右,难以达到1 kHz的高速采集。
3.3.3 基于光学测量的目标位姿采集技术
最常用的基于光学测量的目标位姿采集技术为激光自准直倾角采集技术,其原理如图8所示。激光束入射到安装于吊索上的反射镜表面,反射光线进入激光管经分光镜后入射到PSD传感器,经过信号处理得到反射光线的偏转信息,进而获得镜面的偏转信息与吊索的倾角信息。该方案在悬吊式系统中也得到了应用,如文献[91]。此方案的优点是采集速度高(>800 Hz),倾角测量精度高(<0.03°)。缺点是测量的吊索倾角范围小;只能采集2个旋转自由度的信息;反射镜的质量较大,对恒拉力系统的快速性有一定的影响。
PSD较高的位置分辨率(0.1 μm)和较高的采集速度(10 kHz)使其成为能实现高速高精度大范围采集的关键器件。一些学者提出基于双PSD吊索阴影测量实现吊索倾角采集的原理如图9所示。双PSD平行安装于集成有信号处理电路的PCB板上,激光光斑完全覆盖住2个平行的PSD(间距h)。吊索投影其上,遮住部分光束在PSD上形成部分阴影,吊索晃动,阴影位置也随之变化。PSD输出的位置信号即阴影重心位置x1与x2,根据阴影位置和三角函数关系即可计算出吊索倾角θ。该方案目前在测试阶段。
图9 基于双PSD阴影测量的吊索倾角采集方案Fig.9 Sling inclination acquisition scheme based on double PSD shadow measurement
以上介绍的几种目标位姿采集技术具有各自的优势和不足,归纳如表8所示。可以看到,双PSD阴影测量方案能同时满足高速、高精度和大范围3个指标,在经过测试研究后可能会用到以后的悬吊式微低重力模拟系统中。

表8 各种目标位姿采集技术指标满足情况
4 悬吊式微低重力模拟技术的发展趋势
4.1 系统设计
目前悬吊式微低重力模拟系统的研究成果较多,同时也存在一些缺点,例如吊索无法进行空间交叉。根据目前的研究现状以及航天应用的需求,悬吊法在未来的应用过程中会有以下发展趋势:
1) 悬吊法和其他方法的结合。可以上面用悬吊,下面用气浮支撑以解决空间交叉问题。还可以将悬吊的二维平台布置到实验台底部,设计成主动托举式微低重力模拟系统。悬吊法中的恒力机构可以拓展为二维平面形式,可用于托举式系统,实现水平2个方向的干扰力抑制。
2) 向多索及绳驱并联机器人方向发展。单吊索能够模拟的自由度主要为3个平移自由度,3个 旋转自由度运动主要依靠被动的人机接口支架实现。多索并联系统能够实现6自由度的模拟,在侧面增加吊索实现更为复杂的运动。
3) 在实现微低重力模拟基础上进行相关扩展研究。目前的被吊对象运动速度慢,基本进行的是静力学模拟。当考虑快速运动、动力学模拟时,将会出现很多新的研究,例如微低重力下人体步态研究,空间机械臂微重力下抓取操作时阻抗接触动力学研究,航天器消旋研究等。
4.2 关键技术
1) 恒拉力技术中增加高速、高加速模拟需求。目前的悬吊式微低重力模拟系统更多的是针对运动缓慢的航天器,例如星球车、太阳翼等,针对快速运动目标的系统较少。未来航天器运动速度将提升很多,宇航员也将执行更多复杂任务,这要求恒拉力系统能够适应被吊对象的快速运动,动态地保持吊索力恒定。
2) 恒拉力技术向考虑吊索倾角的变力悬吊发展。目前悬吊式系统吊索拉力设定为恒定值,然而当吊索倾斜时,竖直分力将小于设定值。因此可以让恒拉力系统在设定值附近的小范围做变力控制,始终保持吊索力的竖直分量等于设定值,可以提高竖直方向微低重力模拟效果。
3) 无源控制等能量方法在力误差和力误差积分消除中应用的深入研究。系统能量的变化是系统的本质,因此从能量角度出发,能够将看似独立的力误差和力误差积分消除双指标变成能量塑造单指标。并且从能量角度设计的控制律通常具有本质非线性,比直接用非线性控制方法设计控制律要简单且有物理学解释。
4) 现有目标位姿采集技术的融合或新型技术的应用。现有的几种目标位姿采集技术各有优劣,因此可以多种方式结合取长补短,实现综合效果最优。另外基于精度和采集速度均较高的PSD进行新型吊索倾角测量技术研究也是一个重要的方向,在后处理电路和针对吊索的采集优化上需要进行深入的研究。
5 结 论
1) 对现有微低重力模拟方法进行了讨论,悬吊法具有模拟时间长、模拟范围大、不引入附加惯量等优势,是目前最主要采用的方式。
2) 对国内外悬吊式微低重力模拟系统的研究现状进行了综述,对比了其原理、性能特点和不足等,并且根据原理的不同进行了详细的分类总结,讨论了每类系统的适用性和优缺点。
3) 从微低重力模拟需求出发确定了悬吊式模拟的2条设计准则:恒拉力和吊索竖直,据此提出了3个目前研究中的关键技术并且分别针对其进行了研究现状的综述。
4) 讨论了悬吊式微低重力模拟系统设计及其3个相关关键技术的未来发展趋势。