无转换参数下参考框架间Helmert直转模型及精度分析
2021-03-26姜英明纪晓雨侯晓伟冯彦同
姜英明,纪晓雨,侯晓伟,冯彦同
(1.千寻位置网络有限公司,上海 200438;2.潍坊职业学院农林科技学院,山东潍坊 262737)
0 引言
坐标参考框架是坐标系统的具体实现,通常通过一组核心站点的测站坐标和速度表示.坐标参考框架是测绘活动的参考基准[1],同时,高精度的坐标参考框架也是进行空间大地测量学研究所必须的前提[2].各个坐标参考框架之间往往通过Helmert转换参数来联系.随着我国北斗卫星导航系统(BDS)的建成和BDS坐标系的启用,使用BDS进行精密定位定轨等研究和生产,都需要关注坐标框架的概念[3].为了准确使用各种参考框架,需要分析其转换的性质.
对于瞬时坐标系或精度要求不高的坐标转换,一般采用Helmert七参数进行.而对于高精度的坐标参考框架如国际地球参考框架(ITRF),固定的Helmert七参数不能描述其框架的时变特性,因此Helmert七参数被视为是时变的,此时Helmert七参数被扩展成为Helmert十四参数[4].坐标参考框架在建立时,一般都会公布其到其他主流参考框架如ITRF之间的转换参数,以方便用户使用.
但在实际使用时,某些参考框架之间可能没有直接的转换参数,尤其对于某些区域性的坐标参考框架,此情形并不罕见.此时可通过某些“中间框架”如ITRF进行过渡,即首先将坐标或速度转换到具有直接转换参数的某个ITRF框架,再通过ITRF到目标框架的转换参数,将坐标或速度转换到目标框架.这造成了实际应用的复杂和不便.基于此类问题,本文推导了由间接的过渡参数计算直接转换参数的公式,以简化转换过程,提高计算效率.
1 坐标框架转换原理
1.1 Helm ert七参数情形
在不考虑框架转换参数变率的情况下,一般采用Helmert七参数进行坐标转换.假设从框架1到框架3之间没有直接的转换参数,但可以使用框架2进行过渡.记框架1到框架2的转换参数为T1、D1、R1;框架2到框架3的转换参数为T2、D2、R2.一般情况下,平移参数T的单位为mm,尺度缩放参数D的单位为10−9(ppb),旋转矩阵R的单位为千分之一秒(mas).若坐标或角度分别以m或rad为单位,则T、D、R的量级分别为10−3、10−9、10−9.
依据布尔莎模型,将框架1下的某点P的坐标X1先转换到框架2再转换到框架3下的计算公式[5]为:


式中:X2为点P在框架2下的坐标;X3为点P在框架3下的坐标.将式(1)代入式(2),可得
整理式(3),可得式(4):

式(4)中,D2(T1+D1X1+R1X1)和R2(T1+D1X1+R1X1)两项的量级皆为10−12m,在目前的测量精度下都可以忽略,因此在实际计算中,式(4)可以简化为

对比布尔莎模型的转换公式,可知框架1到框架3的直接转换参数T3、D3、R3可用式(6)计算:

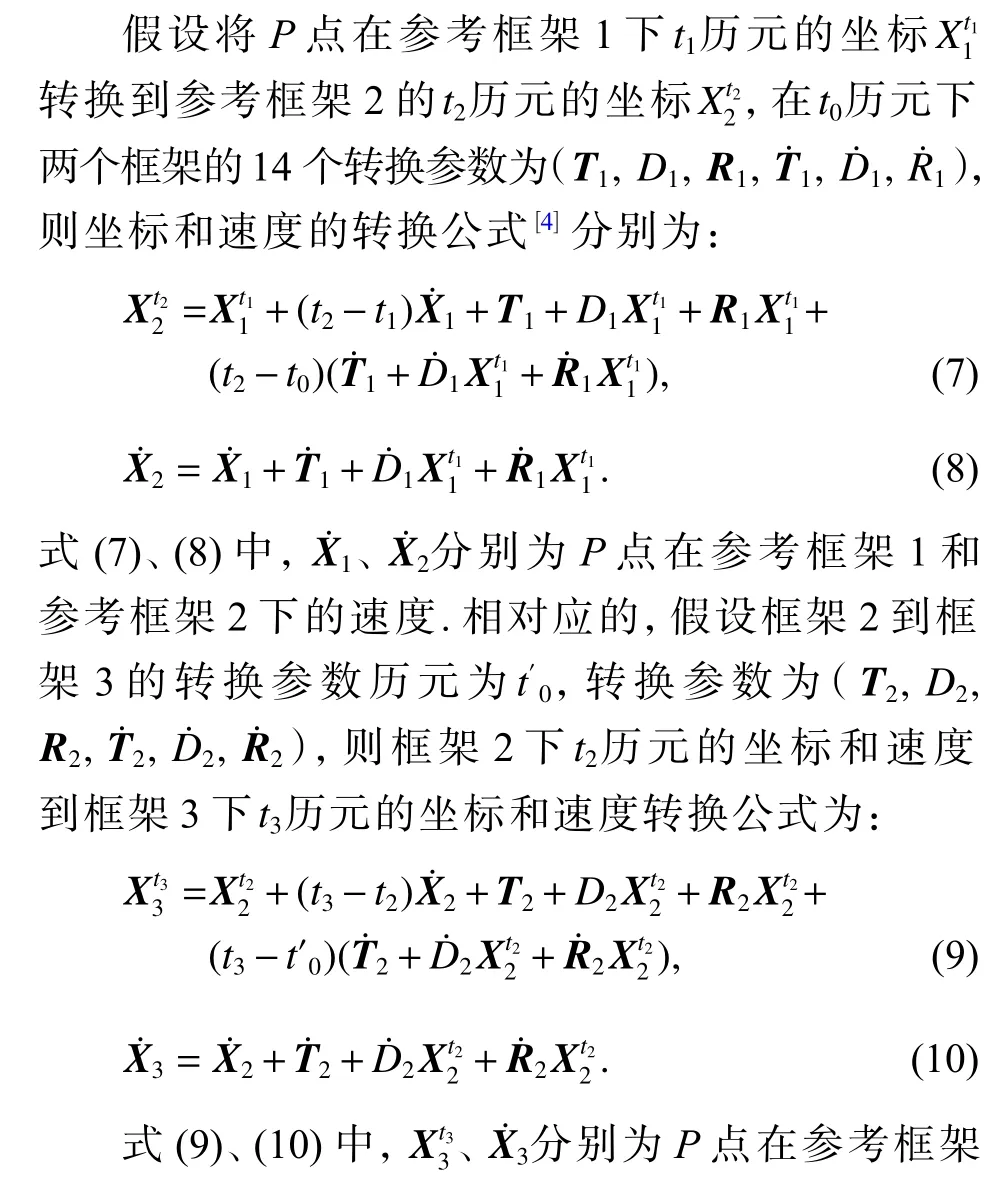
1.2 Helmert十四参数情形
ITRF给出的各ITRF参考框架之间的转换参数也是时变的,因此其转换参数一般有14个,包括给定历元t0下的七参数以及其各自的变化率分别为:T、D、R、T˙、D˙、R˙.变化率的单位分别为mm/a、ppb/a和mas/a,其数量级分别为:10−3、10−9、10−9、10−3、10−9、10−9.

整理式(11),可得

后两项的量级皆为10−12m/a,在计算时可忽略不计,因此速度的转换公式(12)可简化写为

同理,将式(7)、(8)代入式(9),可得坐标的转换公式:
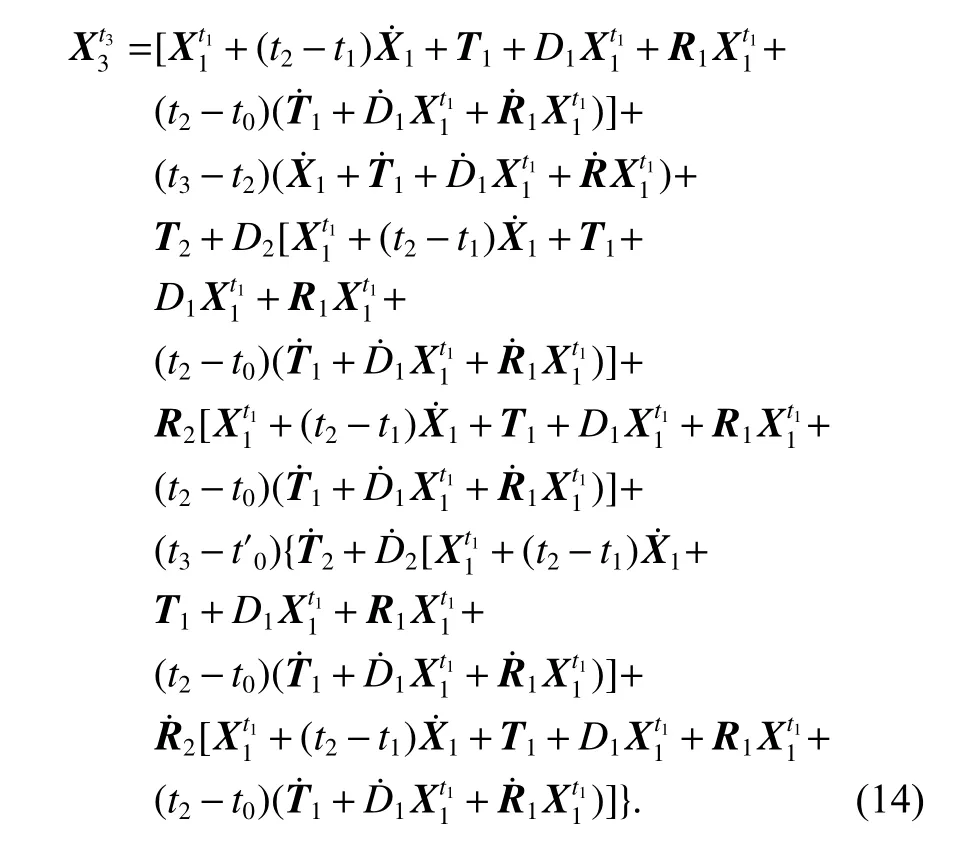
整理式(14)并忽略微小量,可得
作为对照,式(7)亦可写成
2 算例验证
2.1 数据准备
欧洲参考框架网络(EUREF)由多个持续观测的永久性全球卫生导航系统(GNSS)站点构成,用于欧洲地区的参考框架维持.EUREF的数据由法国国家地理学院(IGN)或德国波兹坦地学中心(GFZ)统一处理,并基于其坐标和速度实现ETRS89坐标系.ETRS89是一种地心地固坐标系,其坐标系实现包括ETRF2000、ETRF2005和ETRF2014等[6].EUREF的站点分布由图1所示。

图1 EUREF站点分布图
EUREF公布了其 714个站点分别位于ITRF2014、ETRF2014和ETRF2000框架下的坐标和速度,同时公布了ETRF到各ITRF框架的转换参数.但是,其公布的成果中并未包含ETRF2014到ETRF2000的转换参数.本文以将EUREF站点坐标从ETRF2014转换到ETRF2000为例,验证由式(17)计算直接转换参数的可行性.此时坐标转换有两种方案:
1)首先将坐标和速度从ETRF2014转到ITRF2014,然后再从ITRF2014转换到ETRF2000,记为方法A;
2)使用式(17)计算ETRF2014到ETRF2000的直接转换参数,然后对ETRF2014框架下的坐标和速度进行转换,记为方法B.
EUREF公布的2010.0历元下,ETRF2014转换到ITRF2014的转换参数如表1所示:
2010.0历元下,ITRF2014到ETRF2000的转换参数如表2所示:

表1 ETRF2014到ITRF2014的转换参数

表2 ITRF2014到ETRF2000的转换参数
由式(17)计算得,方法B所使用的2 010.0历元下ETRF2014到ETRF2000的直接转换参数如表3所示:

表3 ETRF2014到ETRF2000的转换参数
2.2 结果分析
作为验证,首先使用方法A将714个站点在ETRF2014下的坐标和速度转换到ETRF2000,并将转换成果与EUREF官方公布的数据进行对比.统计方法A与EUREF官方公布的ETRF2000框架下坐标和速度的差异,统计结果如表4所示:
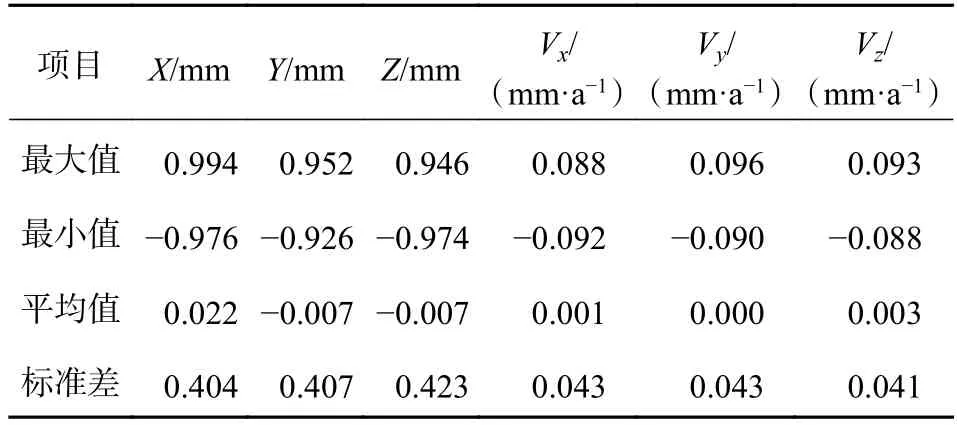
表4 方法A计算结果与官方数据对比统计
其坐标和速度的差异分布分别如图2、图3所示:

图2 方法A与ETRF2000公布的坐标的差异分布

图3 方法A与ETRF2000公布的速度的差异分布
从统计可以看出,方法A与EUREF官方公布的站点在ETRF2000框架下的成果,坐标差异均优于1mm,速度差异均优于0.1mm/a,且差异有正有负均匀地分布在0两侧,这说明方法A所进行的转换是正确的,其转换差异主要受到偶然误差的影响.
然后通过方法B使用表3中的转换参数进行坐标转换,并将其转换成果与方法A作为对比.差异分布统计如表5所示:
差异分布如图4、图5所示:

表5 方法A与方法B计算结果对比统计
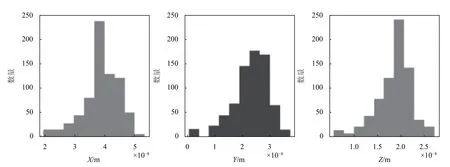
图4 方法A与方法B坐标差异分布图
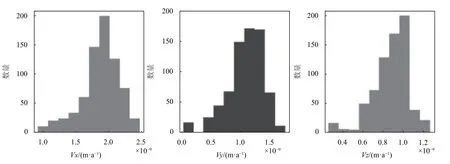
图5 方法A与方法B速度差异分布图
由以上统计可以看出,基于方法A和方法B得到的坐标差异均为10−8m量级,速度差异为10−9m/a量级.并且,其差异均大于0,说明二者之间存在系统差.结合方法B的推导过程,易知这是因为方法B的计算过程中忽略了一些微小量所造成的.但由于二者差异足够小,因此可认为方法A和方法B在一般使用中是等价的.
为验证式(18),使用参考框架ETRF2014到ITRF2014的转换参数,将ETRF2014下的基站速度转换到ITRF2014.作为对比:
1)方法C使用站点在ETRF2014下的坐标;
2)方法D假定站点在ETRF2014下的坐标未知,使用其在ITRF2014下的坐标近似.
两种方法的差异统计如表6所示。

表6 使用精确和近似坐标进行速度转换对比
其差异分布如图6所示。
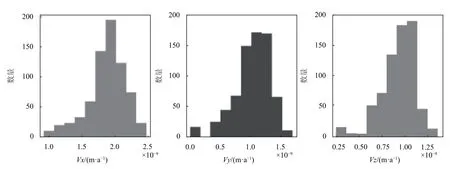
图6 使用精确坐标与概略坐标转换速度的差异分布图
由以上统计可发现,由方法C和方法D所计算的基站速度差异在10−9m/a量级.二者虽然存在一定的系统差,但在实际使用时完全可以忽略.
3 结论
利用Helmert转换公式进行坐标转换时,对于没有直接转换参数的坐标框架,使用多步“过渡”的方式进行转换时公式复杂低效.本文对传统的间接坐标转换方法进行改进,推导了坐标框架间的直接转换公式,并使用714个EUREF站点在ETRF2014和ETRF2000的坐标和速度进行验证,得出以下结论:
1)对于Helmert七参数坐标转换,两个框架的直接转换参数可由作为过渡的框架转换参数求和计算,计算方法如式(6);
2)对于Helmert十四参数坐标转换,两个框架的直接转换参数,其Helmert七参数的变率可由作为过渡的框架转换参数的变率求和计算,Helmert七参数可将作为过渡的转换参数归算到某一相同历元后求和计算,计算方法如式(17);
3)在对速度进行框架转换时,若与原框架下速度对应的坐标未知,可使用其他框架下相差不大的坐标代替.
总体而言,坐标转换的直接参数法和间接参数法差异较小,但本文的转换方法可简化计算步骤,各参考框架之间的转换参数可提前计算后保存,方便程序实现,也可以节约计算资源.