基于dSPACE的纯电动汽车整车HIL建模及测试
2021-03-25江南雨武冬梅杜常清熊建昌
江南雨,武冬梅,杜常清,熊建昌
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室,武汉430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,武汉430070)
新能源汽车是解决环境污染和车用能源问题的有效途径,其中纯电动汽车是新能源汽车产业化的主攻方向之一[1-3]。纯电动汽车中的整车控制系统是电动汽车的顶层控制中枢,能够有效保证车辆的高效协调运行[4]。在纯电动汽车整车控制系统的开发过程中,传统的实车测试方法存在测试成本高、测试周期长等不足之处[5],而整车控制系统HIL 测试前期采用模型层级验证,后期结合实时仿真系统和被控对象模型,可以在实车测试之前对系统大部分功能进行验证,降低实车测试的工作量,缩短开发周期。
目前针对纯电动汽车整车控制系统的HIL 测试,在学术和产业都得到越来越广泛的应用。文献[6]提出基于HIL 仿真测试技术,并利用多体动力学理论建立更为精确的电动汽车部件仿真模型。文献[7]基于MATLAB/Simulink 的交互式驾驶模拟器,对车辆的传动系统部件在实际条件下进行了HIL 测试。文献[8]基于V 流程开发,采用基于模型的设计方法对纯电动汽车动力控制系统进行关键需求定义和逻辑定义,并搭建硬件在环整车环境仿真模型。
在纯电动汽车整车控制系统在环测试中,开发可用于HIL 测试的被控对象模型是关键,目前也有不少学者进行相关研究。文献[9]开发了用于模拟整车控制器控制对象的整车模型,并基于实时系统xPC-Target 目标机进行了硬件在环测试。文献[10]根据整车及部件参数,在MATLAB 中开发了整车模型,并基于NI-PXI 平台对整车控制模型进行硬件在环仿真测试。文献[11]开发了用于电动汽车整车控制系统硬件在环测试的整车模型,并对整车模型的关键参数进行了选择和设计。但是上述研究中,主要侧重于整车物理系统的建模,对于模型在HIL 应用中的相关配置和测试涉及较少。
除了相关学者开发整车模型,近年来也有越来越多的商业仿真软件和工具支持HIL 测试应用。其中硬件平台如NI、dSPACE、RT-Lab 等[12],软件有Carsim、dSPACE ASM、RT-lab 等[13-14]。基于这些商业仿真软件和实时工具平台,可以快速进行整车建模和控制策略开发。但由于车辆类型和结构形式多种多样,对于不同车型的控制系统开发,都要建立对应的被控对象模型。本文将基于dSPACE ASM 整车模型数据库建立一款纯电动商用车的整车被控对象模型,结合相关硬件平台,进行HIL 测试应用。
本文首先依据所研究的纯电动汽车结构和参数,建立整车各子系统模型;然后,为了能够实现和整车控制系统的闭环测试,进行模型和整车控制系统之间的接口配置;最后,基于dSPACE 公司的SCALEXIO 仿真模拟器和MicroAutobox 快速原型控制器,建立硬件在环测试平台,进行整车被控对象模型和控制策略之间的开环和闭环测试。
1 纯电动汽车系统结构与组成
本文基于一款纯电动商用车进行整车建模,动力系统采用单电机后轴驱动,配置减速器和二档变速器。整车系统布置如图1所示。

图1 纯电动汽车系统结构示意图Fig.1 Schematic diagram of pure electric vehicle structure
从图1 可以看出,纯电动汽车的整体结构主要包括整车控制器、动力电池、电池管理系统、DCDC、驱动电机、电机控制器、传动装置以及车辆附件等部分,其中传动装置主要包括变速器、减速器和差速器,车辆附件主要包括空调系统、PTC 系统和冷却系统等。
2 纯电动汽车整车HIL 建模和配置
针对上述纯电动汽车构型,基于dSPACE 实时车辆仿真平台ASM(automotive simulation models)进行整车建模。ASM 是dSPACE 公司开发的一套汽车仿真模型数据库,包含了车辆各组成部件模型,可以充分利用模型库中的部件模块搭建整车模型。
作为被控对象模型,为了实现在HIL 测试中与整车控制系统的闭环测试,除了由各部件模型建立整车模型,还需要进行相关接口定义和硬件资源分配。因此纯电动汽车整车HIL 建模包括两部分:①建立各子系统模型和整车模型,主要包括电机系统模型、电池系统模型、传动系统模型、车辆动力学模型、车辆附件模型和驾驶员模型;②进行与整车控制器之间的相关接口和资源配置。
2.1 电机系统模型
本文研究的纯电动汽车采用永磁同步电机,基于ASM 模型库,建立永磁同步电机数学模型。为了实现电机模型在整车模型中的应用,还建立了永磁同步电机矢量控制算法[15-16]。永磁同步电机在d 轴和q 轴上的等效电路如图2所示。永磁同步电机矢量控制框图如图3所示。电机系统模型主要参数如表1所示。

图2 电机系统等效电路图Fig.2 Equivalent circuit diagram of electric motor system

图3 永磁同步电机矢量控制框图Fig.3 Vector control block diagram of permanent magnet synchronous motor

表1 电机系统基本参数Tab.1 Basic parameters of electric motor system
2.2 电池系统模型
本文研究的纯电动汽车采用磷酸铁锂电池,电池系统模型主要包括3 个模块:①端电压模型,用于计算电池端电压;②电池热力学模型,用于计算动力电池组的各个单体的温度;③电池的荷电状态(state of charge,SOC)估算模型,用于估计电池荷电状态。电池端电压模型等效电路如图4所示。电池模型基本参数如表2所示。
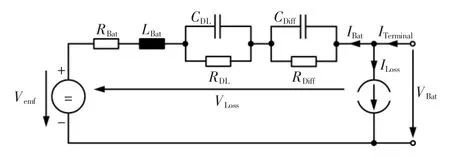
图4 电池等效电路模型Fig.4 Equivalent circuit diagram of battery

表2 电池系统基本参数Tab.2 Basic parameters of battery system
2.3 传动系统模型
本文研究的纯电动汽车采用两档变速器加减速器的传动形式,传动系统模型由变速器模型、减速器模型和差速器模型组成。
变速器和减速器输出轴上的齿轮箱惯量由一个查表模块参数化,查表时将当前的变速器挡位作为输入。变速器的效率也使用相应的查表模块进行建模,变速箱效率可以简单考虑为关于挡位的函数,此效率仅用于扭矩的计算,即忽略与速度相关的效率。差速器中各元件的运动关系可以用差速原理表示。传动系统模型所需的基本参数如表3所示。

表3 传动系统基本参数Tab.3 Basic parameters of driveline system
2.4 车辆动力学模型
本文所建立的整车模型只考虑车辆纵向动力学特性,即主要考虑纵向牵引力和各项纵向阻力。车辆动力学模型将传动系统传递而来的转矩等效转化,利用汽车驱动力-行驶阻力平衡运动方程,计算汽车驱动所需的牵引力和轮胎阻力矩,并求解车辆速度和车轮转速。汽车在行驶过程中的纵向动力学受力示意简图如图5所示。整车系统物理模型所需的车辆基本参数如表4所示。

图5 车辆纵向动力学受力示意图Fig.5 Schematic diagram of longitudinal dynamics of vehicle

表4 纯电动汽车整车基本参数Tab.4 Basic parameters of pure electric vehicles
2.5 车辆附件模型
电动汽车的附件系统对整车能量消耗也有重要影响,在整车控制系统中也是重要的控制对象,因此需要建立电动车附件模型,包括空调系统模型、PTC 系统模型、DCDC 模型、冷却水泵模型和冷却风扇模型。
2.6 驾驶员模型
驾驶员模型的主要作用是模拟驾驶员的操作行为,如踩加速踏板和制动踏板,以及接收期望车速和实际车速的反馈信号等。驾驶员模型采用PID控制算法对车速差值进行控制,产生加速踏板开度和制动踏板开度信号。
2.7 整车HIL 模型接口配置
为了实现整车控制策略和整车模型的HIL 闭环测试,需要分别对模型进行接口配置。整车模型模拟的是车辆被控对象,因此其应该配置相应的输出信号,以作为控制器的输入信号。同时应接收控制器的输出信号,以实现相应的控制指令。
针对所测试的控制策略,整车模型建立的输出信号,即控制器的输入信号如表5所示。整车模型配置的输入信号,即控制器的输入信号如表6所示。

表5 整车HIL 模型主要输出信号Tab.5 Main output signal of the vehicle HIL model
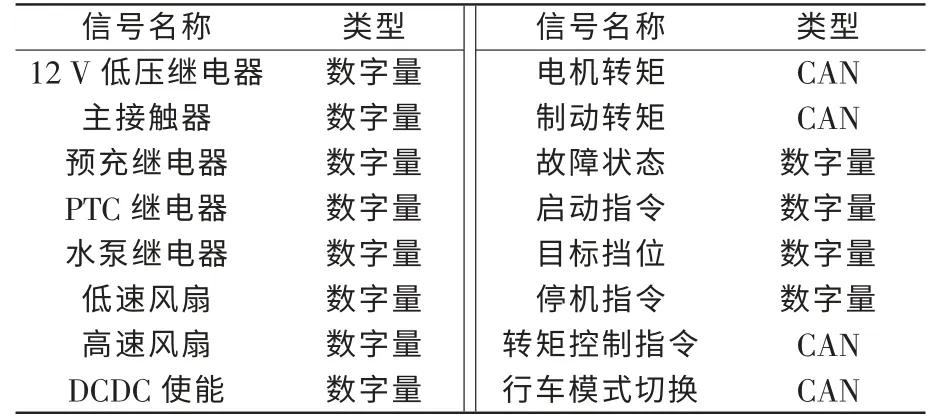
表6 整车HIL 模型主要输入信号Tab.6 Main input signal of the vehicle HIL model
本文所建立的HIL 测试系统是基于dSPACE SCALEXIO 硬件平台,被控对象模型的接口和资源配置可以通过上位机软件ConfigurationDesk 实现。整车HIL 模型的接口配置如图6所示。
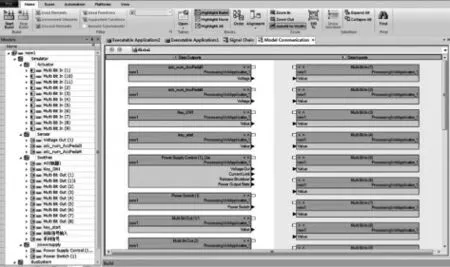
图6 整车HIL 模型接口配置Fig.6 Vehicle HIL model interface configuration
3 基于dSPACE 的整车HIL 模型在环测试
基于dSPACE 公司的SCALEXIO 实时仿真模拟器和MicroAutobox 快速原型控制器,建立硬件在环测试平台。将建立的纯电动汽车整车模型下载到dSPACESCALEXIO 实时仿真器硬件中,模拟被控对象,对MicroAutobox 快速原型控制器中的控制策略进行闭环测试。
3.1 基于dSPACE 的硬件在环(HIL)平台
整车控制系统HIL 测试平台示意图如图7所示。SCALEXIO 是dSPACE 实时仿真系统的核心板卡组件,系统中运行整车被控对象系统。MicroAutoBox II 是dSPACE 快速原型控制器,运行整车控制策略。由于本文重点是建立整车被控对象模型,以实现对现有整车控制策略的测试。因此对于整车控制策略并不作详细介绍。图8所示为基于快速原型的整车控制系统在环测试平台实物图。

图7 整车控制系统HIL 测试平台结构示意图Fig.7 Structure diagram of HIL test platform for vehicle control system

图8 整车控制系统HIL 测试平台实物图Fig.8 Physical map of HIL test platform for vehicle control system
3.2 整车HIL 模型闭环测试结果
采用全球轻型汽车测试循环(WLTC)标准行驶工况,进行整车模型和控制系统的闭环测试。测试结果如图9~图12所示。
图9 是纯电动汽车在WLTC 行驶工况下的车速跟随情况。图10所示为纯电动汽车在WLTC 行驶工况下的加速踏板开度和制动踏板开度结果。由图中的测试结果可知,整个测试过程中,驾驶员模型根据车速差值为PI 闭环控制的加速踏板开度和制动踏板开度,车辆能较好的跟随目标车速,期望车速与实际车速的差值总体控制在-0.1~0.5 km/h之间。

图9 WLTC 行驶工况车速跟随结果Fig.9 Vehicle speed follow result of WLTC driving condition

图10 WLTC 行驶工况测试中踏板开度Fig.10 Pedal position of WLTC driving condition
图11 和图12所示为纯电动汽车在WLTC 行驶工况下的电机转矩变化和电池SOC 变化的测试结果。由图中的测试结果可知,驱动电机能够按照行驶工况的要求输出车辆的需求转矩,保证车辆的正常行驶。由于整个行驶工况减速工况较多,故驱动电机充分发挥再生制动功能以充当发电机。电机转矩表现为负的再生制动转矩,充分进行制动能量回收,将车辆制动时的机械能转化为电能。
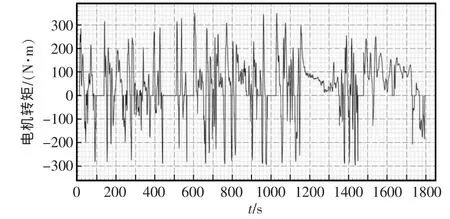
图11 WLTC 行驶工况电机转矩结果Fig.11 Electric motor torque of WLTC driving condition
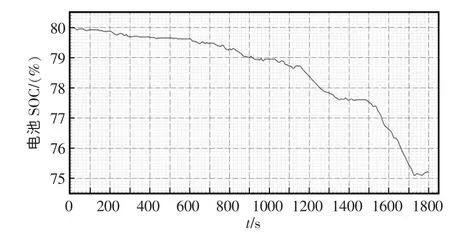
图12 WLTC 行驶工况电池SOC 结果Fig.12 Battery SOC of WLTC driving condition
4 结语
本文针对纯电动汽车整车控制系统HIL 测试中应用的被控对象模型,基于dSPACE ASM 整车建模数据库,建立了整车模型,并进行了与整车系统之间的接口配置。基于dSPACE 公司的SCALEXIO实时仿真工具和MicroAutobox 快速原型控制器,建立硬件在环测试平台,进行了整车被控对象模型和控制策略之间的开环和闭环测试,结果表明,本文所建的整车HIL 模型能够实现基于dSPACE 仿真平台的实时仿真,用于对整车控制系统的在环测试。基于本文建立的模型结构,后续可以进行其它纯电动汽车的整车控制系统开发和测试。
