基于神经网络的配变无功补偿装置故障远程监测方法研究
2021-03-25欧家祥李航峰张俊玮沈兴富
黄 宇,欧家祥,李航峰,张俊玮,沈兴富
(1.贵州电网有限责任公司电力科学研究院,贵阳550002;2.贵州黔驰信息股份有限公司,贵阳550002)
目前用电负荷不断增加,利用无功补偿装置调节电网电压可避免电压低于或高于临界电压。但无功补偿装置的工作故障率较高,影响用户用电及供电局服务水平。因此需深入研究补偿装置故障远程监测方法,及时诊断装置故障[1]。
国内装置故障远程监测技术已取得较大发展,将信号处理技术应用到故障监测中,分析补偿装置故障对电网电路幅值包络的影响,获取故障信号感应规律,利用广义变换的方法,诊断补偿装置的补偿电容,提取装置通信信号时频信息,检验时频信息的频率变化,对故障电容的位置进行定位,实现故障状态的远程监测[2]。
在以上理论的基础上,本文提出基于神经网络的配变无功补偿装置故障远程监测方法。神经网络利用分布式并行信息处理方式,调整补偿装置内部节点的连接关系,分析装置故障。
1 基于神经网络的配变无功补偿装置故障远程监测方法
1.1 采集配变无功补偿装置状态信息
采集配变无功补偿装置通信信号,获取补偿装置的运行状态信息。设置监测主站和采集终端,相互交换补偿装置的状态数据,采集终端使用三层B/S结构,利用具有复杂逻辑操作的C/S 模式,将多种类型的通讯设备,连接到补偿装置[3]。采集终端的通信接口采用RS-485 芯片,通过光电隔离芯片和数字电路,在RS-485 主控电路中添加压敏电阻和气体放电管,以此增加无功补偿装置静电放电的抗性,再利用变压器、隔离电源回路、通信回路、以及RS-485主控电路,为RS-485 电路单独供电[4-5]。采取拨号形式,将监测主站的服务器接入Internet,通过中压电力线载波这一通信信道,接收采集终端的传输信号[6]。此时补偿装置的采集信号可表示为

式中:r(t)为t 时刻,监测主站采集的补偿装置通信信号;k 为采集信号的多径数目;N 为多径数目的总数量;Ak为第k 条多径的幅度;tk为第k 条多径的时延;pk为第k 条多径的衰减信号波形[7]。消除采集信号的干扰信号,使用自适应数字滤波器,通过参数可调的方式,对采集信号进行滤波处理,转换为数字信号。对比数字信号和期望信号,得到误差信号,通过自适应干扰消除算法,更新调整滤波器参数,输出干扰程度达到最小的采集信号[8]。假设期望信号与输入信号为联合平稳过程,则自适应滤波算法为

式中:E 为主通道输入信号r(t)的方差;R 为r(t)迭代运算的更新量大小;w 为滤波器最优权值矢量;r′(t)为滤波器t 时刻的输出信号;P 为r(t)的自相关系数[9-10]。
1.2 监测无功补偿装置运行参数
利用传感技术,融合处理补偿装置状态信息,降低采集数据的虚警率和信息熵,在信息状态量之间建立联系,提高信息状态量的有序度,对装置运行状态进行一致性描述,以此识别装置无功补偿参数。获取补偿装置运行状态的有功功率P,公式为

式中:T 为补偿装置监测周期;u(t)为t 时刻补偿装置的瞬时电压;i(t)为瞬时电流[11]。补偿装置的无功补偿量Q 为

式中:cosφ1为装置补偿前功率参数;cosφ2为补偿后功率参数,数值介于0~1 之间[12]。补偿容量应满足的不等式为

式中:P1为最大负荷日平均有功功率;P2为最大负荷日平均无功功率;φ3为采用大负荷日平均功率因数[13]。
监测补偿装置的供电线路,比较额定电压与节点实际电压,计算电压偏差百分数ε:

式中:U1为节点实际电压有效值;U2为该供电线节点,对应标称电压有效值[14]。利用ε 确定节点实际电压与理论值的偏离程度,当偏离程度超过1%时,判断补偿装置供电电压产生偏离。记录电压偏离的越限时间,计算该时间与监测周期的比值,得到补偿装置电压不合格率,设置不合格率的最高限值为2%。测量监测周期内的电压幅值,计算补偿装置的电压波动率d:

式中:W1、W2分别为监测周期内电压幅值的最大值和最小值;W3为补偿装置额定电压幅值,设置电压波动率的最高限值为1%。采用三相电量法,计算补偿装置的三相电压不平衡度。电压不平衡度算子L公式为
式中:M1、M2、M3分别为三相线电压有效值[15]。补偿装置的三相不平衡度δ 为

设置三相不平衡度的最高限值为2%。最后监测补偿装置的动态响应时间,过程如图1所示。

图1 装置动态响应时间示意图Fig.1 Schematic diagram of dynamic response time of the device
如图1所示,发出控制信号后,装置响应时间应达到无功输出值90%的所用时间,且没有产生过冲。实时监测补偿装置的电能质量数据,对无功补偿容量、电压偏差、电压波动率、三相不平衡度、装置响应时间进行评估,至此完成无功补偿装置运行参数的监测。
1.3 基于神经网络识别无功补偿装置故障类型
当监测参数产生异常变化时,判断无功补偿装置发生故障,对故障类型进行识别,实时跟踪故障参数的变化情况,得到故障样本,传送到监测主站,利用神经网络的人工智能算法,对无功补偿装置故障进行编号分类。通过采集终端,采集装置运行状态的振动信号,针对预处理后的信号,进行小波分解系数单支重构,将振动信号各个频段的谱峰能量值,作为补偿装置的故障特征量,从而获取故障信号数值描述的特征信息,得到神经网络输入的训练样本。再利用模糊关系矩阵和模糊规则,描述振动信号与故障原因、故障种类之间的关系,得到补偿装置的主要故障类型,将其作为神经网络的检验样本。确定神经网络结构,初始化各层接点数量,得到隐藏层和输出层的输出值,调整输入层至隐藏层的连接权值,以及隐藏层和输出层的输出阈值,计算实际输出值与训练样本的偏差。多次更新训练次数,减小输出值与训练样本的误差,实现装置故障特征的神经网络训练,将输出值与检验样本进行对比,识别无功补偿装置的故障类型。记录故障类型和故障时刻,判断装置产生故障的原因,实现基于神经网络,无功补偿装置故障类型的识别。至此完成基于神经网络的配变无功补偿装置故障远程监测方法设计。
2 实验论证分析
进行对比实验,将此次设计方法记为实验A组,两种传统无功补偿装置故障远程监测方法,分别记为实验B 组和实验C 组,比较三组实验识别补偿装置故障的准确率。
2.1 实验准备
以某供电局为实验对象,统计时段为10月1日~10月15日,选取一条典型的10 kV 配电线路的补偿点进行无功补偿,具体参数如表1所示。

表1 实验参数设置Tab.1 Experimental parameter setting
利用无功补偿装置,在补偿点投入相应补偿容量,此时配电线路的各点电压如图2所示。

图2 电网线路无功补偿前后电压Fig.2 Voltage before and after reactive power compensation
三组实验分别对补偿装置的运行状态进行监测。实验A 组对无功补偿装置的常见故障进行数字化归类,划分为正常状况和11 种故障状况,如表2所示。
在表2所示的每种状态中,获取20 组样本,将前10 组作为神经网络的训练样本,后10 组作为检验样本。提取装置运行时产生的信号,处理后提取信号特征,得到神经网络训练的输入值。设故障信号的误差能量为E,此时神经网络输出值与训练样本和检验样本的对比结果如表3所示。

表2 无功补偿装置正常状态及常见故障类型Tab.2 Normal state and common fault types of reactive power compensation device

表3 神经网络实际输出值对比结果Tab.3 Comparison results of actual output values of neural network
如表3所示,训练样本和检验样本与实际输出值的误差能量值较小,最大误差能量为2.81E,说明训练样本和检验样本与实际输出值之间较为吻合,因此实验A 组将神经网络输入端节点数量定为10,对应无功补偿装置的运行状况,以此实现故障监测具有合理性。
2.2 实验结果
2.2.1 第一组实验结果
三组实验采集无功补偿装置的运行状态信号,设置采样频率为50 kHz,信号时速为30 km/h,实际采集的补偿装置信号频谱,在2500 Hz 发生明显频率畸变。在此基础上,利用单边衰减脉冲信号模型,仿真装置故障信号,设置故障频率为2500 Hz,三组实验采集并处理信号后,比较异常信号的中心频率,实验结果如表4所示。
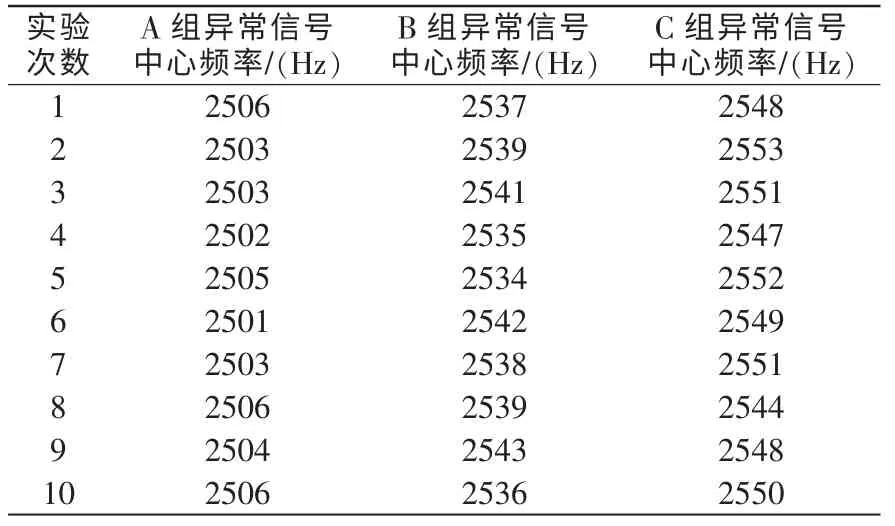
表4 第一组实验结果Tab.4 Experimental results of the first group
如表4所示,实验A 组异常信号的平均中心频率为2504 Hz,实验B 组和C 组的平均中心频率分别为2538 Hz、2549 Hz,A 组与2500 Hz 更加接近。2.2.2 第二组实验结果
在第一组实验的基础上,改变占空比,检验三组实验提取的故障信号,与无功补偿装置故障仿真信号的相似程度。利用互相关系数,衡量故障信号的提取效果,相关系数越大,提取信号与原信号越相似,实验对比结果如表5所示。

表5 第二组实验结果Tab.5 Experimental results of the second group
如表5所示,当占相比增加时,提取信息的相关系数也随之增加,但实验A 组相关系数一直高于B 组和C 组,平均相关系数为0.850,B 组和C 组平均相关系数分别为0.783、0.736,A 组相关系数分别提高了0.067、0.112。
2.2.3 第三组实验结果
三组实验提取故障信号特征信息后,识别无功补偿装置的故障类型,利用Matlab2010b 软件平台,统计三组实验对不同故障状态的诊断结果,计算故障诊断准确率,结果如表6所示。
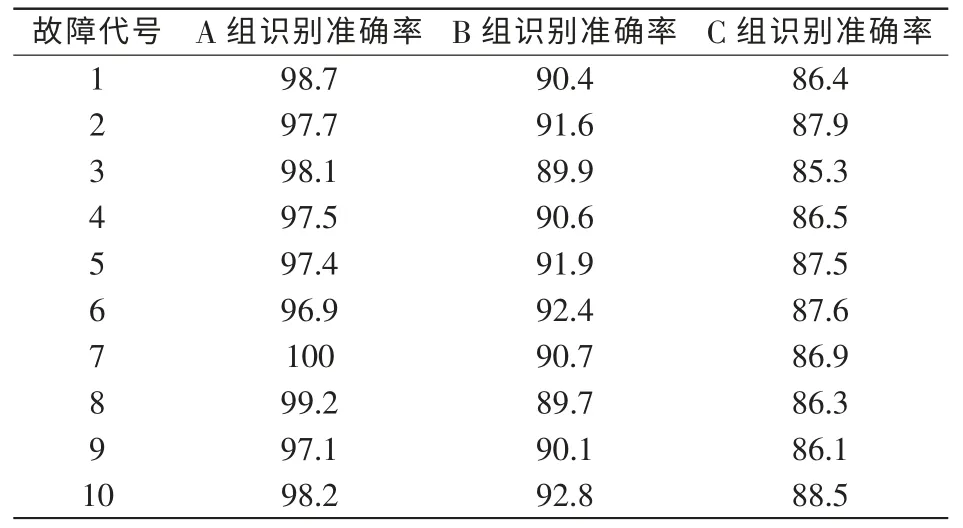
表6 第三组实验结果Tab.6 Results of the third group
如表6所示,针对无功补偿装置的常见故障类型,实验A 组平均识别准确率为98.1%,实验B 组和C 组识别准确率分别为91.0%、86.9%,A 组识别准确率分别提高了7.1%、11.2%。
综上所述,此次设计方法相比传统方法,减少了故障信号采集频偏,提高了故障信号提取效果,采集异常信号的中心频率更接近实际故障频率,与实际故障信号更加相似,在此基础上提取故障信号特征量,利用神经网络识别故障,提高了无功补偿装置故障类型的识别准确率。
3 结语
此次设计方法利用神经网络,对补偿装置故障进行识别,提高了故障诊断准确率。但此次方法仍存在一定不足,故障参数监测局限于稳态评估,在今后的研究中,会对比无功补偿装置的补偿性能,实现暂态部分的电能质量分析。
