基于RFID的智能化教室座位占空感知系统设计与实现*
2021-03-24杨荣张子博
◆杨荣 张子博
0 引言
随着科技发展,利用传感技术、物联网技术等新兴技术来改善学习环境、建设智能化教室成为必然趋势,这些技术在智能实验室建设与管理中也逐渐应用并发挥重要作用。其中,座位占空感知技术是发展智能化教室/实验室的重要组成部分。在教学课堂中,它能够智能统计学生上课出勤率,也可以为教学质量评价提供辅助支撑数据,还可以应用在学生从事自主实践活动的实验室场所进行学生人数的统计,辅助实现实验室智能化管理。
常用的教室座位占空感知技术主要有图像识别技术、红热信号检测技术等。基于图像识别技术的座位占空感知系统主要依靠实时采集现场图像,并与无人情况下的图像像素分布进行差异对比,来判定相应区域座位上是否有人。该系统设备成本低、处理速度快,但实际应用中受限于教室内的光线情况,可能由于光线的影响而造成一定的识别误差。基于红热信号检测技术的座位占空感知系统则依靠红外摄像头采集到的人体红外信号,分区域进行红热信息识别,进而检测人体的有无。该系统受到现场温度限制较大,室内温度的变化为红热信号捕捉增加了很多干扰因素,可能使结果产生较大的误差。
基于射频识别技术(Radio Frequency Identification,RFID)实现了C#环境下智能化教室座位占空感知与检测,进而完成教室课堂考勤系统。RFID系统中布置有读写器和读写天线,并在每个座位上都布置了检测所需的射频电子标签用于接收并检测特定信号。读写器将收集到的标签信息传送到计算机处进行信息处理后,在终端软件上显示结果。
1 基于RFID技术的系统设计原理与数据采集
RFID系统在座位占空感知中的应用,基于人体会对RFID设备的通信信号造成干扰的原理实现。无人体干扰情况下的信息采集如图1a所示,有人体干扰情况下的信息采集如图1b所示,信息采集的差异体现在有人与无人两种情况下读写器接收信号强度(Received Signal Strength Indication,RSSI)不同[1]。
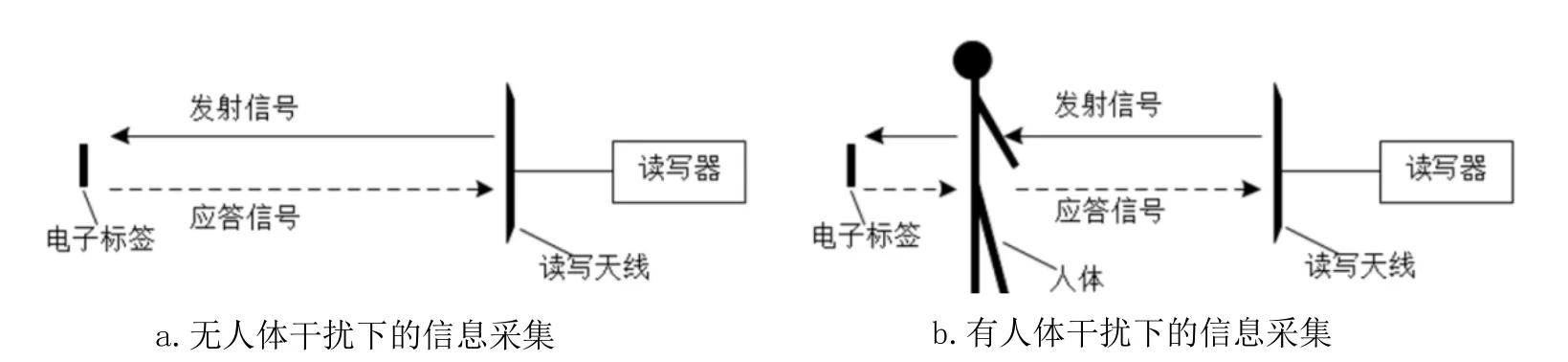
图1 人体对RFID系统产生干扰的示意图
基于人体对RFID通信的这种干扰,可以进行基于RFID的座位占空感知技术系统的应用设计。在系统规划中,教室内布置RFID读写器和天线,天线位于座位前方高处;教室内分散布置射频电子便签,便签位于座椅靠背上,人体在座位上会处于标签与读写天线的电磁场中,如图2所示。在读写器与标签进行通信时,人体会对双方通信信号产生一个相当明显的干扰[2-3]。采集到的标签信息由读写器传送到计算机进行信息处理,判定座位上是否有人。
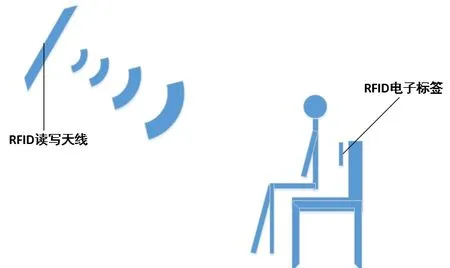
图2 设备布置方式示意图
为了保证系统设计的可行性,预先进行实际数据采集和原理验证。这里进行两组指定距离下射频识别系统的接收信号强度数据采集。第一组采集的数据结果如表1所示,采集时读写天线距离应答电子标签4 m,二者之间无任何实物干扰,采集1 000个数据。

表1 无人情况下的RSSI数据统计
利用采集到的数据进行数据分布图绘制,数据分布情况如图3所示。从数据分布情况来看,采集到的数据分布比较稳定,且大部分数据处于64~69 dBm之间。
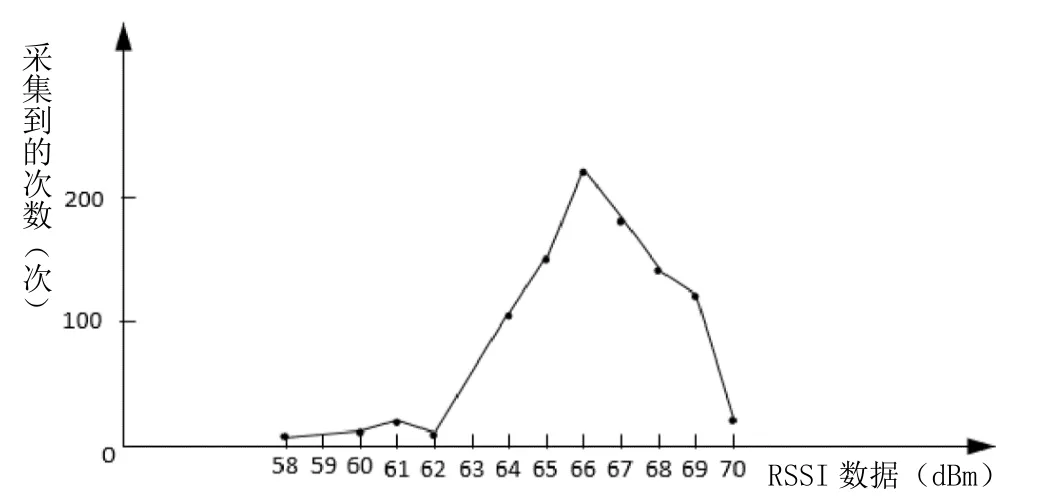
图3 无人情况下的RSSI数据分布
第二组采集的数据结果如表2所示,采集时读写天线距离应答电子标签4 m,电子标签布置在一个座位的靠背上,并且有一个人端坐在座位上,采集1 000个数据。绘制的数据分布如图4所示,大部分数据处于47~51 dBm之间。
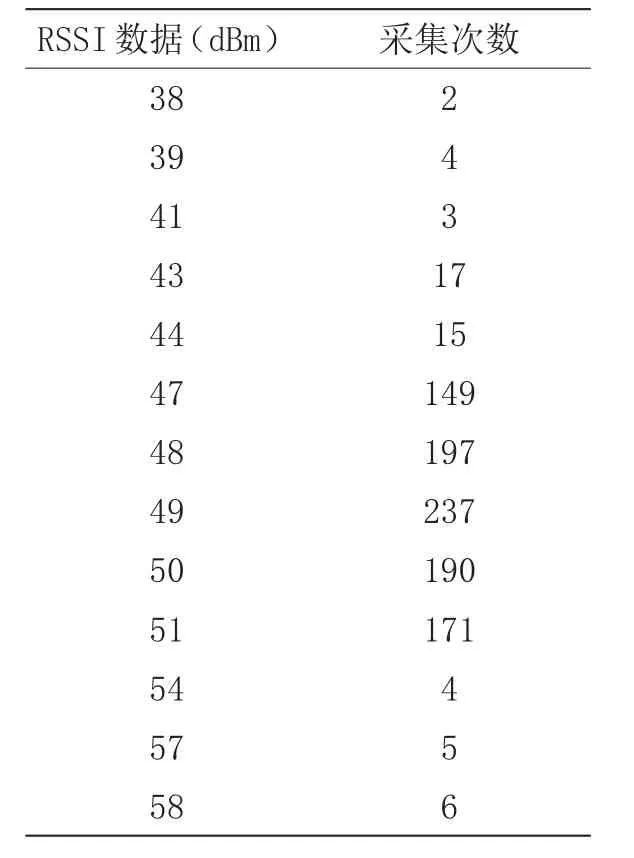
表2 有人情况下的RSSI数据统计
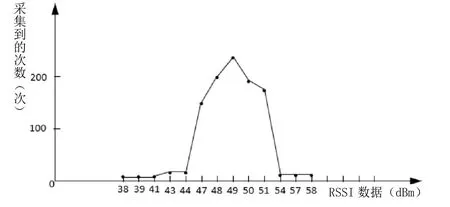
图4 有人情况下的RSSI数据分布
对采集的两组数据分布进行对比,数据分布差异直观地反映了两种情况下的接收信号强度差异:有人情况下读写端依然能够采集到标签的回波信号,但是接收信号强度会有明显的衰减。实验数据的采集为系统设计提供了可行性验证。
2 教室座位占空感知系统设计与实现
2.1 系统组成
基于以上数据采集结果,在教室实际环境中进行基于RFID技术的教室座位占空感知系统设计,系统结构如图5所示,由读写器、应答器与应用处理软件三部分组成。

图5 基于RFID的座位占空感知系统设计
系统使用分体式四通道读写器,型号为AFD-8200A。该设备有四个外接TNC天线接口,支持RS232、RS485以及TCP/IP网络等多种用户接口;工作频段为902~928 MHz,配合8 dBi圆极化天线稳定读取距离为3~5 m,配合12 dBi线极化天线稳定读取距离8~12 m。
使用的读写天线型号为AFD-8600A,其稳定读取距离可达15 m,支持协议为ISO18000-6C或ISO-1800-6B;其工作频段为902~928 MHz,功率为1 W,并且可由软件调整。数据接口方面具备Wiegand263442、RS232以及RS485数据接口。天线增益为12 dBi水平极化。系统使用型号为AFD-501的电子标签,标签由PVC材料覆盖;使用的芯片为Alien公司生产的higgs3芯片,存储容量为256 B;适用载波频率为860~960 MHz。标签为无源电子标签[4],通过接收到的读写天线发射的电磁信号为自身的充放电容充电来提供发射信号所需要的能量。
RFID系统工作原理[5-6]如图6所示。由于受到设备本身采集速度的限制,实际应用中设备采集标签信号的方式是每100 ms采集一次。
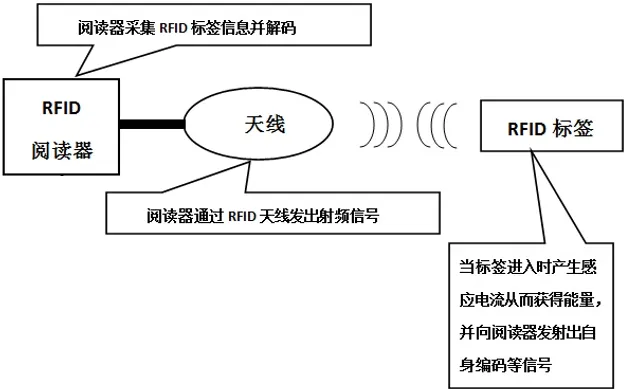
图6 RFID系统工作原理图
系统中,软件部分基于厂家提供的C#语言SDK软件开发包进行开发,软件程序内进行数据抓取并完成相关数据处理。在开发包中包含所需要的两种数据:EPC号和RSSI值。这里将EPC号写定为所代表的教室内座位号,如标签布置在教室的第一排第三个座位,则EPC号就写为0103。
2.2 数据处理
读写器采集的标签数据需交由计算机进行数据处理。依据之前实验验证阶段所做的工作,需要在采集到足够的单个标签的回波信号强度值之后,首先进行数据粗大误差剔除,之后才能进行数据分布范围的判定,进而得到座位占空感知结果。
2.2.1 粗大误差剔除 对采集到的实验数据进行观察分析,发现在实际应用中,读写器在采集大量信号强度数据时,部分数据会由于受到现场环境干扰而发生一定程度的扰动,形成粗大误差。为了确保严谨,在使用采集到的数据之前需要进行粗大误差的剔除,以保证数据的稳定分布。常用的剔除粗大误差的法则有拉以达法则、葛拉卜思法则、肖韦乐法则、迪珂迅法则等。在进行数据处理时,这几种法则有各自不同的处理偏向性,需要结合其处理特性和实际情况更好地进行选择。如表3所示,系统进行粗大误差剔除采用综合判别法[7],针对不同的测量优先选择相应的法则进行数据处理。
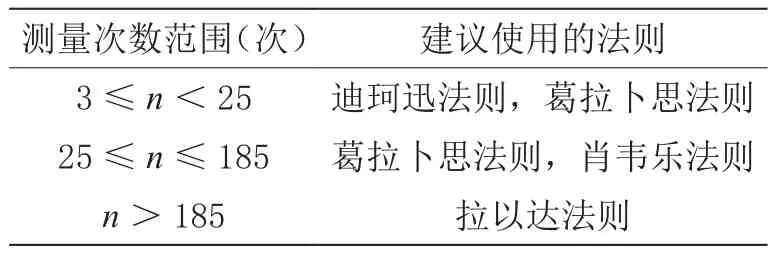
表3 进行粗大误差剔除的综合判别法
2.2.2 数据分布范围判定 在数据处理过程中,不但要对已采集到的数据进行粗大误差的剔除,还需要进行数据分布范围的判定。在粗大误差被剔除之后,对可靠数据进行比较,可直接写出相应程序判定最大与最小值。取出这两个值后,函数可直接将其作为返回值,然后与提前设置好的预值进行比对,就能进行座位占空感知的判断了。
如设定某标签的EPC号为0105,即该标签布置在第一排第五个座位上。通过现场数据采集并处理,在无人的情况下,0105的返回信号强度值分布在65~70 dBm之间,则65与70便是可以在程序中设定的预值。在该座位坐人后,再次进行数据采集并处理,此时的返回信号强度值分布在49~54 dBm之间。通过两组数据的对比可以看出:无人与有人两种情况下,返回信号强度值的分布偏移幅度相当大。
2.2.3 多径散射效应验证 实测时发现人体不但对落座的座位上标签的返回信号有干扰,同时对临近座位上所布置的标签也有一定程度的干扰,这里利用仿真实验对实际教室内存在的多径散射效应做出验证。
1)进行数据采集和热图仿真。首先让四名学生分别坐在第一排的第三及第四个座位、第二排的第三及第四个座位,进行该环境下的接收信号强度数据采集;然后剔除粗大误差后将采集到的数据用MATLAB进行热图仿真,结果如图7所示。从图7可以看出:有人落座的座位明显下凹,而其两侧无人的座位明显凸起。
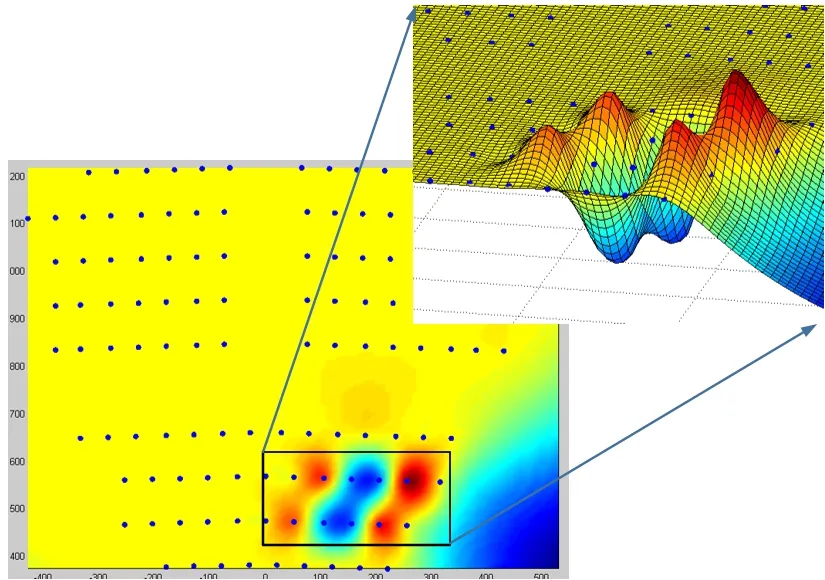
图7 座位有人的信号强度示意图(二排,共坐四人)
2)对教室靠后位置的情况进行验证。让四名学生分别落座于第六排第六个座位、第七排第六和第八个座位、第八排第七个座位,将采集到的数据再次进行MATLAB热图仿真,结果如图8所示。同样可以看出:有人落座的座位明显下凹,而其两侧无人的座位明显凸起。

图8 座位有人的信号强度示意图(三排,共坐四人)
系统所采用的方案和数据处理准则是:预先设定好每个座位无人时的信号强度值,之后将实测数据与预设值进行对比,低于预设值的判定为有人。根据这个判定原则,有人座位两侧信号强度明显高于其在无人时的信号强度,人对临近座位标签的干扰完全不会影响到系统对结果的判定。
3 教室座位占空感知系统实地测试
3.1 RFID系统在教室的分布
在拥有230个座位的阶梯教室布置教室座位占空感知系统并进行实际测试。实验所使用的射频读写天线为水平极化、增益12 dBi、频率902~928 MHz。将读写天线布置在教室中间讲台上方3.3 m高的位置上测试射频天线的覆盖范围。为了进行更直观的描述,依据教室结构绘制示意图,如图9所示,给出天线覆盖情况的实际测试结果,每一个圆点代表一个座位。其中实心点代表读写天线信号能够覆盖的部分,空心点为覆盖不到的部分。可以看出该天线的实际覆盖效果比较理想,在该教室布置三台读写天线即可完成对整个教室的信号覆盖。

图9 单个读写天线能覆盖的范围
3.2 系统工作流程
系统工作流程如图10所示,可简单概括为:
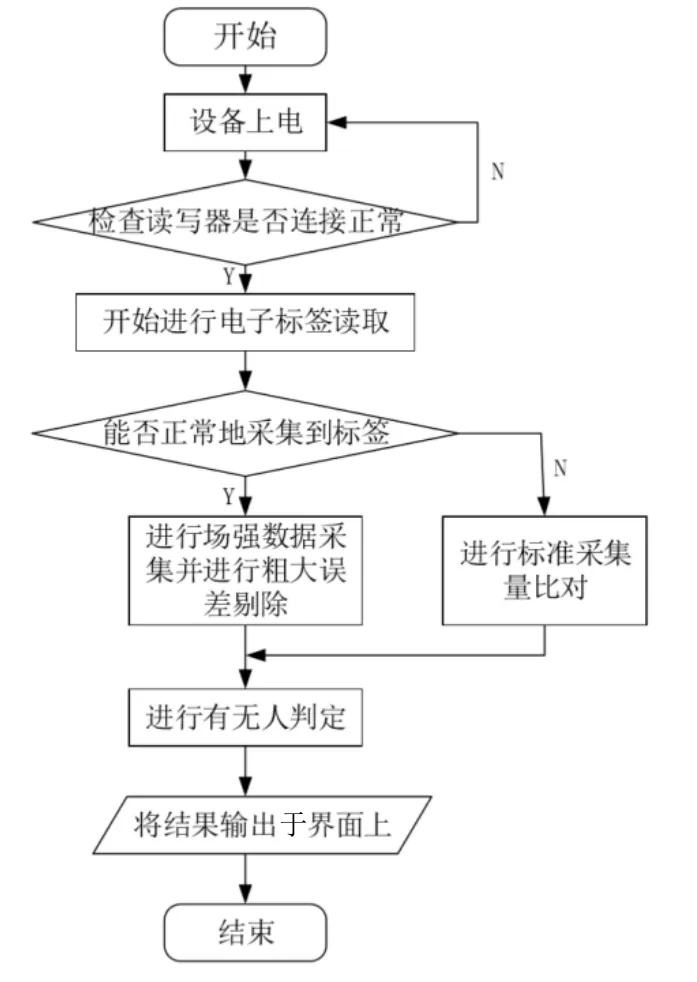
图10 系统工作流程图
第一步,设备上电接通后,开始标签采集工作;
第二步,当对某一特定标签采集量达到一定数量后,程序开始对数据进行粗大误差剔除;
第三步,粗大误差剔除工作完成后,进行数据分布范围判定,然后与提前设定好的预值进行对比,如果比预设值的分布产生明显下降,则认为该标签的返回信号受到人体的干扰,即判定为该标签所代表的座位是有人的。
以上情况为标签在能够采集到电子标签返回信号的情况时的判定方式,另有一种情况是人体将身后的电子标签完全屏蔽,此时系统无法通过对数据的处理来进行分析。针对这种情况,系统中提供一个固定时间内的标准被采集量。在系统所限定的固定时间间隔内,提供被采集量的标签的被采集次数达到指定数量要求时,程序会将该数目与其他待判定标签的采集量进行对比。如果某一标签的采集量少于标准采集量时,则认为该标签在被读取的过程中有被人体干扰的情况,不能正常读取,即判定为标签所代表的座位是有人的。
系统开发用于交互的显示界面,如图11所示。

图11 界面显示(蓝色为有人的座位)
3.3 实测数据结果
在实际应用环境中对系统进行测试以检验该系统性能。将系统按照前述布置方式安装到阶梯教室中,整体系统布置方案示意图如图12所示,教室前端布置三台读写天线,对教室实现完全的信号覆盖,虚线部分表示覆盖范围。其中一个读写天线的安装位置如图13所示。将电子标签布置在教室中的座椅靠背上,作为系统的应答器。三台读写天线都连接到一台读写器上,这台读写器将信息发送至计算机,依靠开发的应用软件进行信息处理以及结果呈现。

图12 系统布置方案示意图

图13 教室中读写天线的位置
表4为利用布置在教室环境下的座位占空感知系统进行测试的实测结果,结果显示该座位占空感知系统具有较高的正确识别率。其中,由于读写天线在远距离会有比较明显的信号强度衰减,造成后排的部分标签有时无法被读取到,造成一定的测试误差。
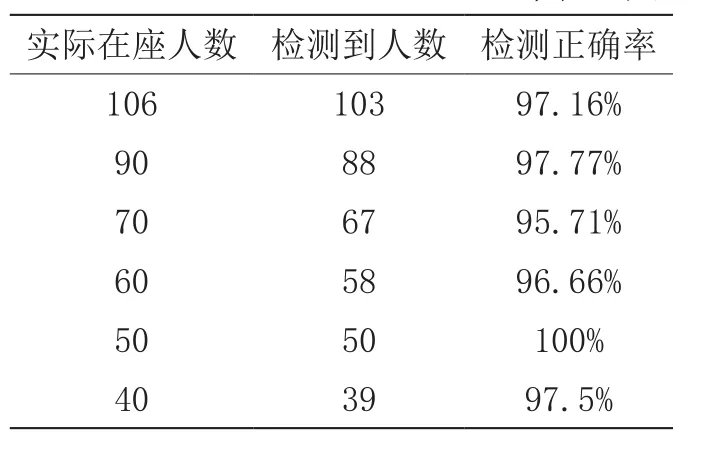
表4 实际测试情况 单位:人
4 结束语
将RFID这一低成本、高效率的应用技术与智能化校园建设相结合,建立基于RFID的教室座位占空感知系统。在实际应用环境中进行大量接收信号强度的数据采集,并对数据进行分析,以验证系统的可行性。针对实测数据存在的粗大误差,引入误差理论研究,并选择适合于本应用的粗大误差剔除方法。在此基础上,进行基于RFID技术的座位占空感知系统的规划与布置,完成C#环境下的软件程序编写和界面开发。系统在实际教室环境中进行测试,获得较好的测试效果和较高准确率。
