面向人机融合的C4ISR系统架构研究*
2021-03-24张兆晨毛晓彬周光霞
张兆晨,毛晓彬,周光霞
(1.中国电科集团第28研究所 信息系统工程重点实验室,江苏 南京 210007;2.软件新技术与产业化协同创新中心,江苏 南京 210000)
0 引言
C4ISR系统[1]是集指挥、控制、通信、计算、情报、监视、侦察于一体的军事信息系统,是作战指挥的神经中枢和战场力量的倍增器。随着第3次人工智能浪潮的到来,智能化技术渗透到作战的每个环节[2]。如何构建“类人化”系统,实现机器与作战人员的相互理解、高效协作,是跨越式提升作战能力的突破口。在此情况下,传统C4ISR系统的形态和运行模式将发生颠覆性变化,人机融合系统应运而生。
美军已在战略和技术层面开展人机融合系统研究。美军在《人机系统科技发展路线图》[3]中强调,人机系统集成(human-machine systems integration,HSI)是系统设计、研发和采办的重要组成。美国战略与预算评估中心(center for strategic and budgetary assessments,CSBA)在《未来地面部队人机编队》报告[4]中提出未来地面部队人机编队的三大形式。美国国防部高级研究计划局(defense advanced research projects agency,DARPA)部署了一系列人机融合项目。人工智能探索(artificial intelligence exploration,AIE)[5]计划提出人机共生的设想,探索让机器适应不断变化的战场情况的新理论和应用。灵活编队(agile teams)[6]项目致力于实现高度灵活的人机混合编组的最优化设计,以更好地将人的认知优势与机器智能结合。知识导向的人工智能推理模式(knowledge-directed artificial intelligence reasoning over schemas,KAIROS)[7-8]项目通过研发新型半自动化人机融合智能系统,提升态势洞察、预警探测、情报处理和战争理解的能力。成功团队的人工社会智能(artificial social intelligence for successful teams,ASIST)项目[9-10]旨在开发具备社交技能的智能体,能够与人编组协同作战。人机探索软件安全(computers and humans exploring software security,CHESS)[11]项目研究人与机器协作推理、识别并修复高威网络漏洞。
架构决定系统能力[12-13],构建面向人机融合的C4ISR系统,其首要环节是系统架构设计。文本提出人机混合增强智能的C4ISR系统的架构设计原理模型,设计了系统组成与运行机制,实现对系统架构的静态特征和动态属性的描述,形成人机融合的C4ISR系统架构设计范式,并通过在下一代C4ISR系统设计中的典型作战案例验证其有效性和可行性。
1 设计理念
人机融合需要将人的认知能力与机器的强大算力实时有效融合,以应对瞬息万变的战场环境。在作战指挥中,人机融合智能贯穿感知、判断、决策、控制环节。因此,人机融合系统设计必须打通从任务环境到作用对象的OODA全过程。建立人机融合系统架构的原理模型,如图1所示。
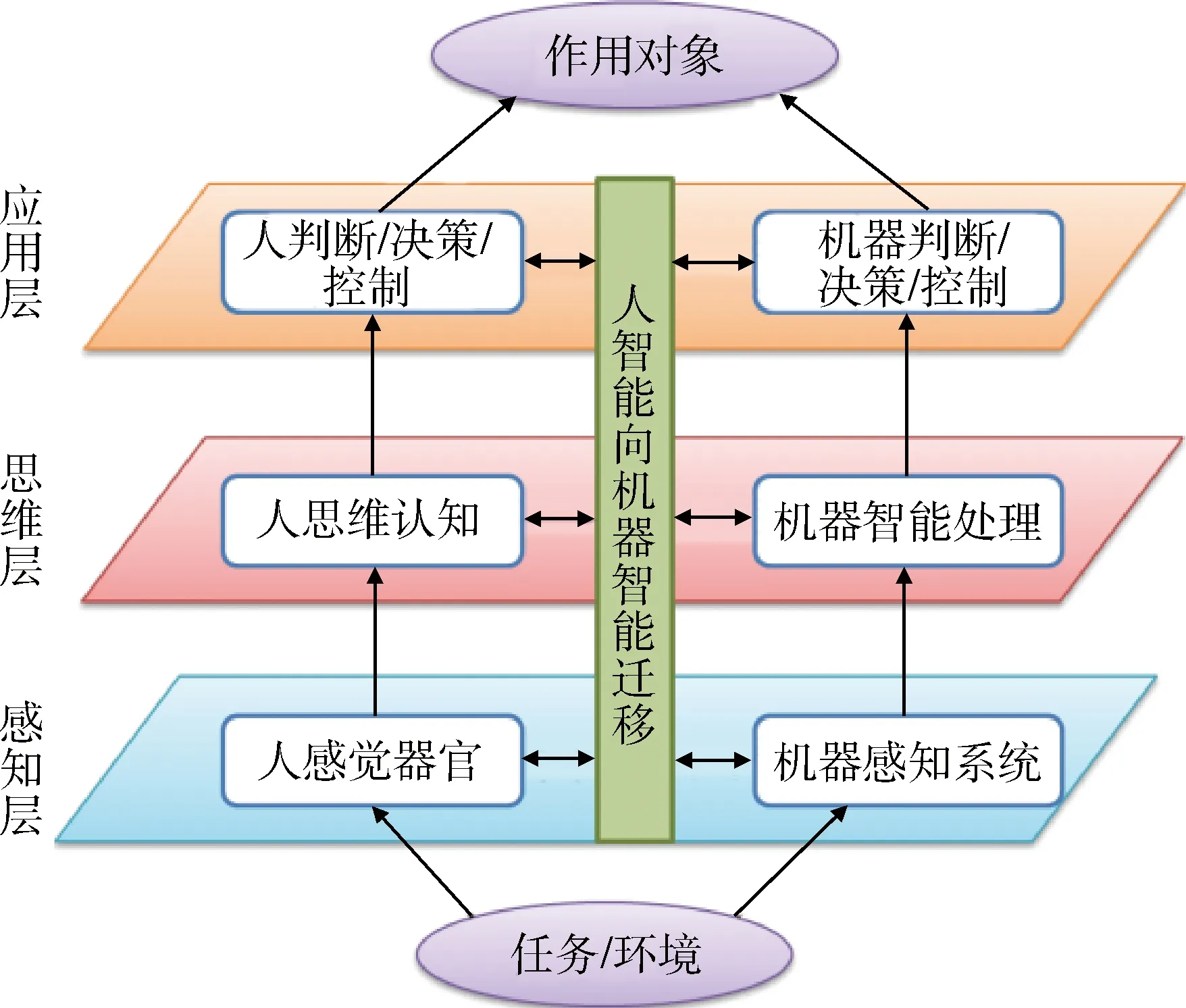
图1 人机融合系统架构的原理模型Fig.1 Principle model of human computer fusion system architecture
(1) 感知层:将各类战场传感器采集的客观探测数据与指挥员、参谋、士兵等感官获取的主观信息进行融合,形成一种新的情报获取方式。
(2) 思维层:通过机器的计算能力,让机器学习指挥员、参谋的思维模式,实现人的认知能力向机器迁移,构建一种新的机器学习模式。
(3) 应用层:将人的判断、决策和控制信息与机器的运算结果匹配、比较,发现机器在决策中问题缺陷,由人驱动机器进行算法模型优化,以作出更加精准、可靠的决策。
人机融合系统架构设计的核心是如何使得人的智能向机器智能迁移,塑造“互理解、互信任、互启发”的人机共生指挥控制模式。本文创新提出博弈对抗推演的手段,将人脑中的知识、经验逐步转化为机器的知识网络,教会机器在类似情况甚至从未出现的情况下如何决策。最终打造强大的“机器大脑”,实现真正的机器人战争。人只需要在作战环路外监控战场局势,在关键节点调控战场走向。
2 系统组成
将人机融合系统架构设计的原理模型映射到人机融合的C4ISR系统,构建系统组成,如图2所示。原理模型的感知层映射成为人脑感知系统、机脑情报感知系统,思维层映射成为人脑知识网络、机脑知识网络,应用层映射成为人脑应用功能、机脑应用系统,“人智能向机器智能迁移”则通过博弈对抗推演环境实现。
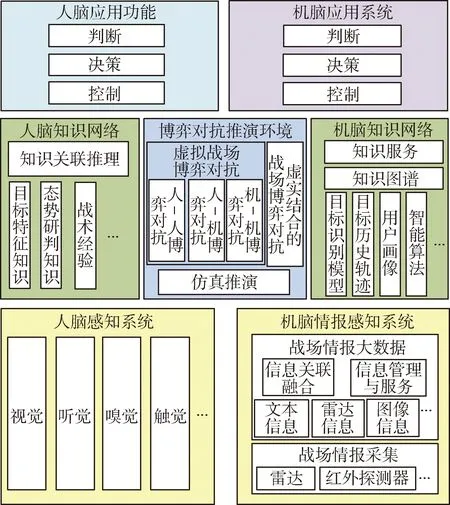
图2 面向人机融合的C4ISR系统组成Fig.2 C4ISR system composition for human computer fusion
可以看到,面向人机融合的C4ISR系统与传统智能处理系统相比,人脑与机脑处于对等地位。新增的博弈对抗推演环境支持人脑在作战业务中与机脑无缝对接,适时将人脑的智慧融入机器的业务流程中。逐步驱动机器提炼知识,提升认知和决策能力,解决以往基于传统人工智能算法无法求解的问题。
(1) 人脑感知系统:是人通过感官获取任务和环境信息的途径,包含视觉、听觉等功能。
(2) 机脑感知系统:通过各类型、广域分布的传感器采集目标状态、战场环境等信息,并进行初步综合处理,形成服务化的情报信息。
(3) 人脑知识网络:人脑知识网络包含指挥员、参谋大脑中具备的业务领域知识,如基于经验获得的目标特征、战术战法等知识,人脑的思维过程就是对这些知识关联推理,支撑其作出判断决策。
(4) 机脑知识网络:机脑知识网络是将知识进行模型化表征,标记知识之间的关联关系,构建形成知识图谱,对机脑应用系统提供知识服务。一方面,机脑知识网络能够自主进行隐含规律的挖掘,扩充知识图谱;另一方面,通过人机博弈对抗,不断从人脑中获取经验知识,实现知识演化更新。
(5) 博弈对抗推演环境:包括仿真推演引擎、虚拟战场博弈对抗平台和虚实结合的战场博弈对抗平台,其中,虚拟战场博弈对抗平台支持人-人、人-机、机-机博弈对抗学习训练。博弈对抗推演环境是实现人脑知识向机脑知识迁移的关键,它在数字空间构建了一个虚拟战场,既支持特定任务场景下的人与人、人与机器、机器与机器的全数字仿真推演,也能够接入真实战场情报数据,进行虚实结合的仿真推演。
(6) 人脑应用功能:是指挥员、参谋凭借经验、认知实施指挥控制的业务功能,能够在关键节点为机器提供重要决策方向的指导。
(7) 机脑应用系统:是机器在机脑知识网络和博弈对抗推演环境的支持下,实现快速、可信、精准的指挥控制的业务功能。
3 运行机制
基于面向人机融合的C4ISR系统组成,建立其运行机制,描述其动态属性。“人智能向机器智能迁移”是通过博弈对抗实现的,其过程是分阶段的,包括人与人、人与机器、机器之间自主博弈对抗3个阶段。只有在平时基于博弈对抗推演环境,由人驱动机器开展学习训练,获得人的认知能力,才能在战时保证机器作出准确决策。
3.1 战前博弈对抗训练
战前博弈对抗推演环境构建了一个虚拟战场,通过人人和人机对抗,促进人脑知识向机脑迁移。在此基础上,通过机机自主对抗,不间断产生供机器学习的样本数据,验证、优化模型,自主提升系统能力。
(1) 人-人博弈对抗训练
依据历史作战案例,由博弈对抗推演环境构建一个虚拟任务和作战环境。由指挥员、参谋分别扮演红蓝双方,在虚拟战场中开展博弈对抗。在人脑知识网络的支撑下,所有判断、决策、控制信息均由指挥员、参谋下达至虚拟战场,虚拟战场产生红蓝双方的推演数据发送给机脑知识网络,机脑知识网络进行分析、关联,获取指挥员、参谋的目标识别经验、战术战法、决策规律等知识,初步构建形成知识图谱。人-人博弈对抗训练的运行机制如图3所示。

图3 人-人博弈对抗训练的运行机制Fig.3 Operational mechanism of game confrontation training (human to human)
(2) 人-机博弈对抗训练
机器学习获取了一定的决策知识后,就可以开展人与机器的博弈对抗训练。同样,由博弈对抗推演环境构建一个虚拟任务和作战环境,由指挥员、参谋指挥红方兵力,机器指挥蓝方兵力进行博弈对抗。红方的决策信息由指挥员/参谋下达至虚拟战场。蓝方的指挥决策则基于机脑知识网络中的知识图谱和知识服务下达至虚拟战场。虚拟战场产生红蓝双方的推演数据发送给机脑知识网络,机脑知识网络的知识图谱进一步扩展,挖掘深层次、隐含的规律,发现决策中的缺陷和薄弱环节,验证算法的有效性,优化决策模型,实现机脑知识网络的演化生长。人-机博弈对抗训练的运行机制如图4所示。

图4 人-机博弈对抗训练的运行机制Fig.4 Operational mechanism of game confrontation training (human to computer)
(3) 机-机博弈对抗训练
当机器的知识网络趋于完善,具备与人进行博弈对抗的能力后,就可以开展机器自主的博弈对抗训练。由机器扮演对抗的红蓝双方,在机脑知识网络的支撑下,所有判断、决策、控制均由机器作出,并将信息下达至虚拟战场,实现机器全天候不间断的博弈对抗训练,不断积累样本数据,优化知识网络,并探索人脑无法设想到的复杂场景下的决策模式,实现机器能力的自主提升。机-机博弈对抗训练的运行机制如图5所示。

图5 机-机博弈对抗训练的运行机制Fig.5 Operational mechanism of game confrontation training (computer to computer)
3.2 战中平行仿真推演
战前的博弈对抗训练已实现机器获取人的认知能力,形成了能够自主决策的“机器大脑”。在真实作战过程中,博弈对抗推演环境接入传感器的真实情报数据,机器作为“虚拟指挥员”或“参谋”,运用“机器大脑”实现与对手的全自主作战,指挥员、参谋只需监控机器的作战执行过程,在关键节点作出重要决策,掌控战场态势走向。平行仿真推演的运行机制如图6所示。
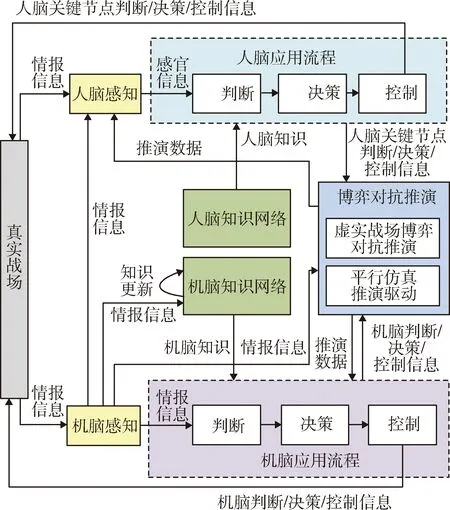
图6 平行仿真推演的运行机制Fig.6 Operational mechanism of parallel simulation deduction
4 应用实例
在本文提出的架构范式的指导下,结合智能目标识别与拦截的作战场景,采用美国国防部体系结构框架 2.0 版(department of defense architecture framework,DoDAF2.0)[14]的系统接口描述模型(SV-1)和系统状态转移描述模型(SV-10b),运用自主研发的体系架构开发工具ModelDesigner,分别开展典型系统组成和运行流程设计,对面向人机融合的C4ISR系统架构范式进行实例化。
4.1 系统组成设计
以红方指挥所发现蓝方不明目标并采取行动应对的场景为例,设计红方的人机融合目标识别与武器控制系统。红方机脑已通过战前人-人、人-机、机-机的博弈对抗学习训练,积累了目标识别、武器控制等相关知识,形成一定的自主判断、决策与控制能力。
首先,红方雷达发现蓝方空中一批不明目标,由红方参谋初步判断,假设目标属性,红方机脑进行关联印证,验证参谋的判断。红方指挥员决策是否对蓝方目标采取反制措施,以及采用的武器平台,由红方机脑接入真实目标情报,进行平行推演,预测红蓝双方对抗态势,并控制红方武器行动。
设计SV-1并细化到第2层系统组成,系统组成模型如图7所示,系统组成描述如表1所示。

图7 系统组成模型Fig.7 Systems composition model
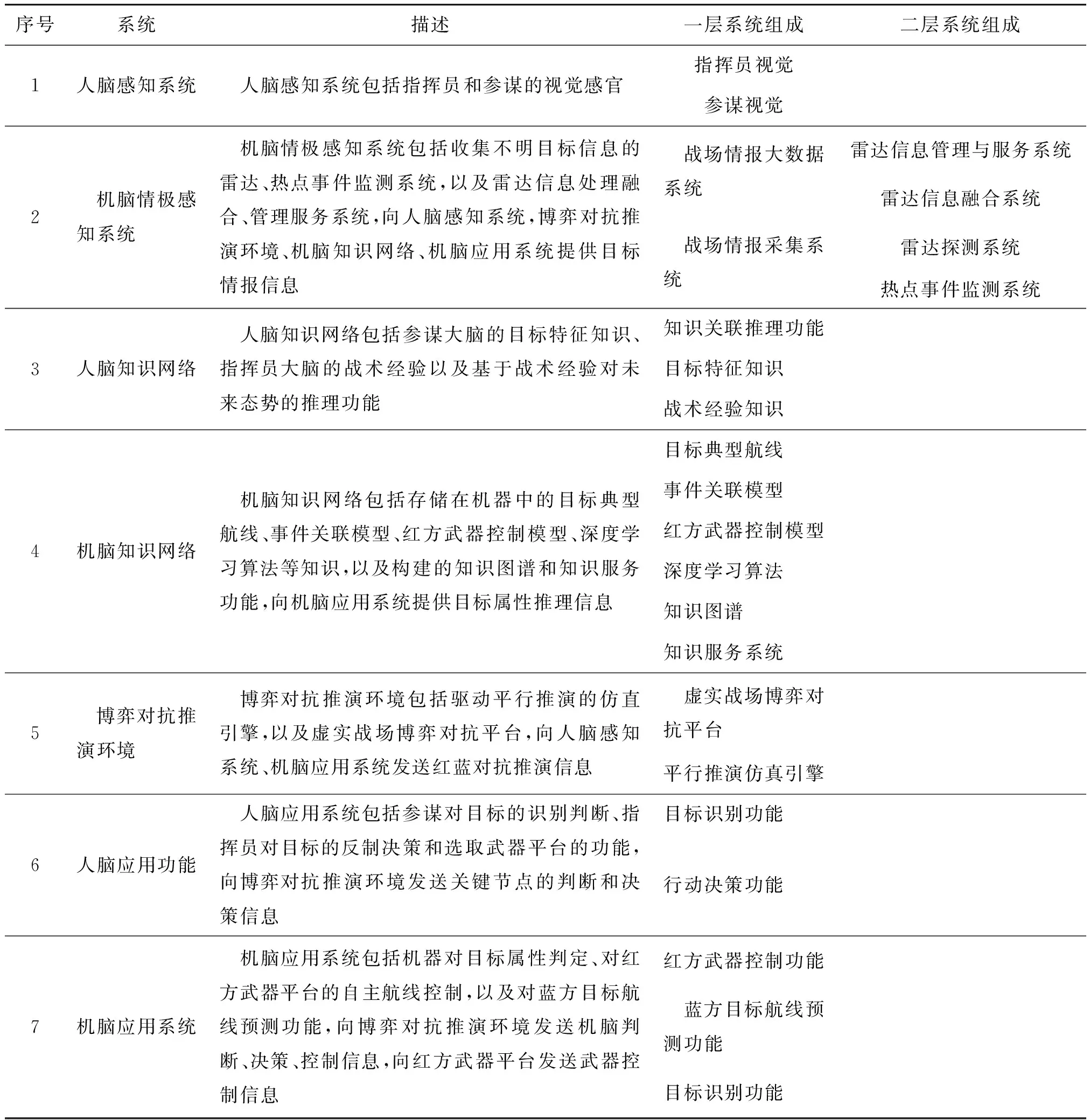
表1 系统组成描述Table 1 Systems composition description
针对7个系统组成,设计SV-1的系统组成之间的关系模型,如图8所示。
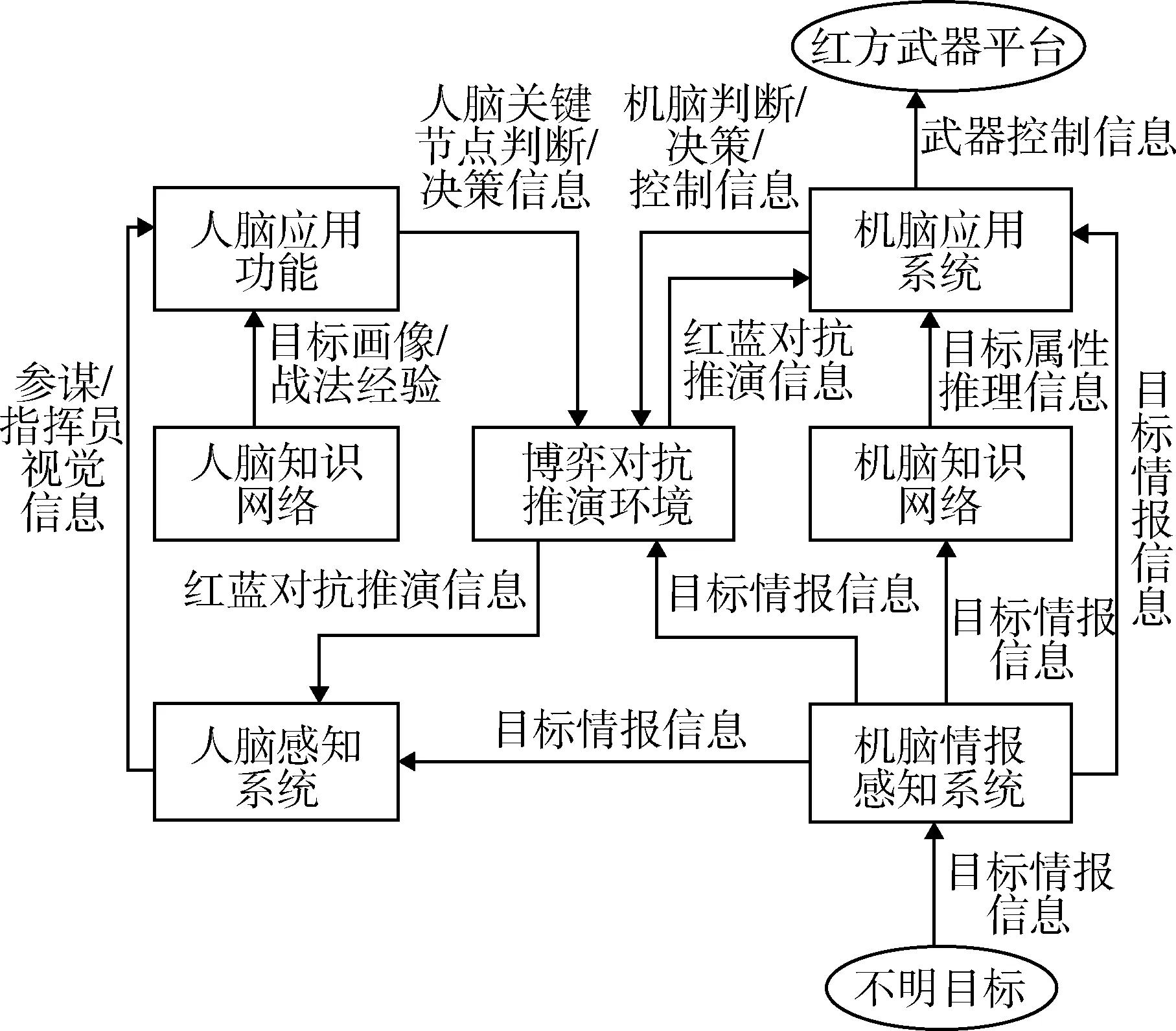
图8 系统组成关系模型Fig.8 Systems composition relationship model
通过以上设计,建立了人机融合的目标识别与武器控制系统的SV-1模型,基于机脑知识网络和博弈对抗推演环境,实现对参谋假设的印证,并自主预测敌方行动路线,提前发现指挥员意想不到的敌情,实现机器“智力”与指挥员和参谋“谋略”共生共长。该模型为下一代智能化C4ISR系统详细设计、验证、研制提供了重要支持。
4.2 系统运行流程设计
采用泳道图的方式设计SV-10b系统状态转移描述模型,任务场景分为2个阶段,分别是目标识别阶段和平行推演阶段,如图9所示。

图9 系统状态转移描述模型Fig.9 Systems state transition description model
在目标识别阶段,红方机脑情报感知系统的雷达发现蓝方空中一批不明目标,将融合后的航线上报给参谋,参谋观察航线信息,根据与大脑中的目标画像知识匹配,初步假设目标为2架A型侦察机;为了验证参谋假设的正确性,并获得更准确的目标属性,机脑知识网络在知识图谱中调取A型侦察机的典型航线,并进行匹配;同时,为进一步确认目标的国别、意图,机脑知识网络调取机脑情报感知系统收集的热点事件,发现近期B国在该区域开展军事演习的事件,由此,机脑应用系统确认目标的型号、国别、意图的基本属性。
在平行推演阶段,红方指挥员依据人脑知识网络中的战法经验,决策采用3架C型歼击机对蓝方侦察机进行拦截和驱逐。博弈对抗推演环境构建一个虚实结合的战场,机脑情报感知系统实时收集红蓝双方武器平台的真实情报信息。一方面,机脑应用系统能够基于机脑知识网络的武器控制模型计算,实现对红方歼击机的自主行动控制,并超前规划多条行动路线;另一方面,机脑知识网络对蓝方侦察机典型航线匹配,支撑机脑应用系统对蓝方侦察机航线的预测,从而实现红蓝双方行动的超实时、多分支博弈对抗推演。在推演过程中,指挥员监视虚实战场中红蓝双方的行动,当推演到关键分支节点时,指挥员可对红方行动方向进行选择决策,掌控战场局势。
通过以上设计,形成了人机融合的目标识别与武器控制系统的SV-10b模型,描述了系统基本业务流程。基于机器自主博弈推演的方式,实现对抗性开放复杂决策问题搜索求解,突破指挥员脑力极限,为指挥员提供多条分支行动路线选择,并探索人脑意向不到的结果,指挥员只需在关键节点进行决策,从而颠覆传统机器作为计算工具的辅助决策方式,解决指挥艺术与机器智能有效融合的难题。该模型为智能化系统业务流程运转提供了理论指导。
5 结束语
未来智能化战争中,只有将人脑的创造力、思维力与机器的计算力相结合,优势互补,形成人机互理解、互启发的指挥控制模式,才能应对超出人脑生理极限的高速、复杂、多变、持久的战场环境。本文为人与机器智能深度融合的C4ISR系统架构提供了指导性的设计范式,并以应用实践验证其有效性,从而改变传统机器作为辅助工具的人机协同作战模式,塑造人与机器的混合增强智能[15],发挥1+1>2的体系作战效能。
