海上编队传感器管理架构研究*
2021-03-24丁春山何佳洲
丁春山,何佳洲
(1.东南大学 信息科学与工程学院,江苏 南京 210096;2.江苏自动化研究所,江苏 连云港 222061)
0 引言
海上编队由舰艇、潜艇、舰载直升机与固定翼飞机等组成,支持编队完成作战任务的情报信息除部分来源于编队外节点,主要依靠编队内各平台装备的雷达、声纳、光电、电子侦察(electronic support measures,ESM)、敌我识别器(identification friend or foe,IFF)等传感器,合理使用编队内多平台传感器、发挥最大协同效能,是海上编队完成多样化作战任务的关键环节之一,需要编队多平台多传感器管理技术支撑。文献[1]提出如何利用海上警戒探测系统使多传感器形成系统威力,有效对抗四大威胁,才是警戒探测系统的精髓。
文献[2-5]分别研究了传感器管理的定义,综合来看传感器管理的目的是合理调度使用有限的传感器资源,在满足电磁频谱、通信、海战场自然环境等约束下,实现对多个目标和作战空间的最优探测(优化检测概率、截获概率、传感器自身的发射能力、航迹精度或丢失概率等指标),恰当地满足防空、反潜、对海对陆攻击等多样化作战任务的信息需求。
传感器管理技术日益重要的原因在于,编队传感器向网络化应用发展,传感器管理工作量、难度增大,传统依赖人工操作的模式难以为继;传感器管理可以获得更优的传感器作战效能,在信息化战场可拓展新的作战手段和能力。
针对海上编队传感器管理,Johnson设计了海军网络中心战下协同传感器管理架构[6]。Benaskeur研究了海军单传感器、单平台、多平台3类传感器管理问题[7],提出了基于整子体(holonic)的传感器管理架构[8]。文献[9]以实现对海上多平台传感器资源自动或半自动协调管理控制为目标,设计了传感器管理与控制系统的功能结构,包括传感器信息管理、传感器组织管理、收发通信管理、传感器控制管理和传感器综合效能分析等功能模块,采用“集中管理,分散控制”的方式管理海上多平台传感器。文献[10]提出了海军多平台协同作战条件下基于战术组件网(TCN)的传感器资源管理体系结构。文献[11]研究了基于Holon控制的协同网络传感器管理体系结构。文献[12]提出海上编队、平台和传感器3级架构的网络化管理控制体系,编队及每个平台都有一个宏管理器,每个平台上的传感器都有各自的微管理器。文献[13]研究了基于策略的海战场传感器资源运维管理框架,按全局、区域和本地分层运维管理,设计了应用层、资源管理层和资源层3层结构的海战场传感器资源运维管理系统框架。另外文献[14]从编队和本舰2个层次研究了传感器管理的内容及模型。文献[15]构建了单舰多传感器协同探测体系结构,提出了多传感器协同探测资源调度模型。从以上研究成果看,海上编队传感器管理涉及多管理节点协同,多采用分层结构,网络化协同是发展方向,是信息化海战中一项困难且需要深入的研究工作。
本文研究海上编队传感器管理架构,第1节首先分析了编队传感器管理需求,第2节提出了编队传感器管理的总体结构,以及编队传感器方案事前筹划与实时调度技术。
1 编队传感器管理需求
海上编队由舰艇、飞机等多种兵力组成,部分兵力组成战术群,负责编队内某一方向的防空、反潜等任务。传感器作为作战资源之一,遵循军事指挥的分层架构,海上编队传感器资源的组成架构如图1所示。海上编队指挥节点需管理战术群和直属平台的传感器,战术群负责管理群内各平台的传感器资源,平台负责搭载传感器的管理使用,传感器可精细化地设置工作模式和参数。
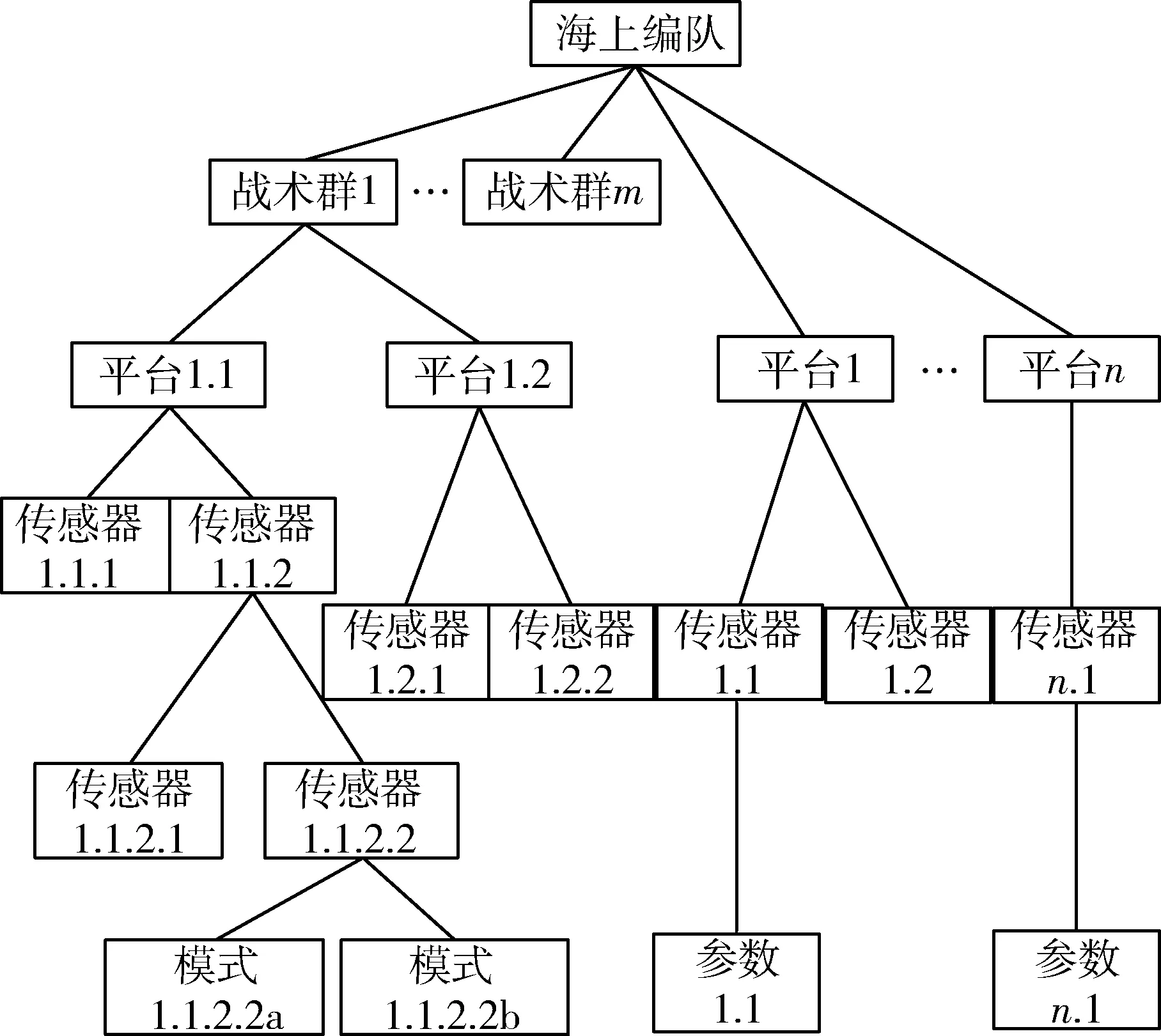
图1 层次化的海上编队传感器资源Fig.1 Hierarchy of naval sensing resources
海上编队传感器管理的作用在于统一管理编队内各平台传感器资源,恰当地探测数据,满足编队多样化作战活动情报需求。如图2所示,传感器管理使情报保障具有反馈机制,根据作战活动情报需求和信息融合后的情报性能度量的差异,反馈控制编队内传感器资源,使其探测获取能够提升信息融合结果的原始数据;同时向信息融合模块反馈传感器状态与能力、传感器协同探测策略,使其掌握传感器探测数据特性,采用有针对性的融合算法。
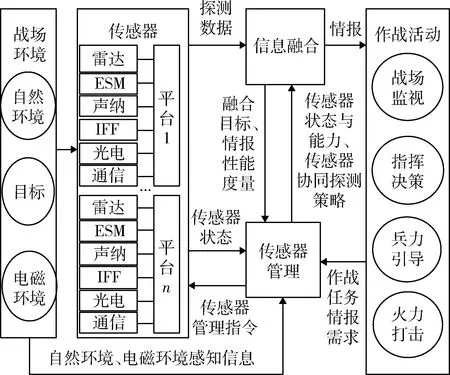
图2 海上编队传感器管理作用框图Fig.2 Function block diagram of sensor management for maritime formation
1.1 编队多层级传感器管理需求
海上编队的编队指挥节点、战术群指挥节点、平台、传感器等节点需协同工作,但不同节点有不同的传感器管理需求。
1.1.1 编队、战术群传感器管理需求
战前筹划中,依据总体作战方案制定编队/战斗群情报保障计划;在作战过程中,监控所属兵力传感器状态,根据作战任务、态势变化,实时调整传感器的任务、开关、工作频率等,满足多样化作战的情报需求。
编队、战术群传感器管理需适应编队的通信能力、信息融合架构,传感器管理的需求包括:
(1) 任务分配
根据信息需求建立感知任务,并分配给所属兵力群或平台。在保证整体探测能力满足作战信息需求的基础上,应减少传感器资源的冗余使用和主动发射。
(2) 传感器部署
从保障传感器探测效能出发,提出编队平台空间部署建议,确定配属编队、兵力群的直升机、无人机等以警戒探测任务为主的作战平台航路。
(3) 组织协同
协调解决所属各平台传感器的使用冲突;使我方传感器之间的干扰最小化,包括雷达同频干扰,主动传感器对邻近被动传感器的干扰等;使敌方对我方的压制干扰、欺骗干扰影响最小化;为编队多平台信息融合提供最优的探测数据输入,实现主被动传感器协同、主动传感器协同、被动传感器协同等。
1.1.2 单平台传感器管理需求
战前筹划中,单平台主要接收上级的传感器管理计划,依据分配的探测任务、工作时间,以及可用频率、禁用频率等频谱管理要求等确定本平台的传感器工作计划。
在作战过程中,监控本平台传感器状态,根据作战任务、对抗态势的变化,自动/半自动地调整传感器的开关、工作模式以及工作频率等参数,尽量减少指挥员的工作量。
传感器管理需求包括:
(1) 传感器任务管理。接受上级的传感器管理命令,并将其作为自身的感知任务之一,汇集本平台的作战信息需求生成传感器任务清单;分配传感器任务,明确各传感器的责任区域、跟踪目标、工作时间等;
(2) 传感器调度,根据本平台面临威胁及作战任务需求确定本平台传感器的开关、工作模式等;
(3) 传感器协同,实现不同传感器探测目标的交接,保证目标监视、跟踪的连续性,传感器工作冲突消解等;
(4) 监控本平台传感器工作状态,并上报上级节点。
1.1.3 单传感器管理需求
单传感器需接收平台、编队的探测任务、调度命令并响应,上报自身状态及效能评估结果;制定传感器工作计划,通过模式/参数控制优化自身探测能力,支撑多传感器协同工作。
1.2 编队传感器协同需求
海上编队传感器管理的目标是使编队内各平台传感器在统一管控下协同工作,如同一个有机整体,能够形成系统威力。编队传感器之间的协同包括任务级的区域协同,以及多种实时协同工作需求。
1.2.1 区域协同
海上编队传感器最基本的协同方式是区域协同,根据对空、对潜、对海等不同方面作战的需求,分别构建远中近结合的协同防空、反潜和对海攻击警戒探测圈。编队指挥节点根据各平台承担的任务和位置,分配相应的警戒探测责任区,使整体探测能力满足各方面作战的信息需求。
1.2.2 传感器工作协同
在编队传感器资源按区域配置的基础上,传感器工作过程中需相互协同,保证探测目标的达成。
(1) 时间协同
时间协同包括传感器的接替工作和按一定时间要求对目标进行观测。
雷达等传感器一般不能长时间连续工作,故针对某一区域的警戒探测任务由相邻平台或同平台传感器分时负责。
为配合某一作战行动,需要传感器同时或按时序探测。如为提高目标发现概率,多平台传感器同时覆盖某一重点方向;在我方对陆打击后,立即组织对陆探测,以便快速毁伤评估;在需要对威胁目标判性时,立即调度敌我识别器对目标识别。
(2) 频率协同
1) 避免我方传感器同频干扰。编队各平台常配置同型号雷达,如果采用相同的频率等工作参数,可能导致我方雷达同频干扰。
2) 反对抗。控制我方传感器工作的频率、空间覆盖和时间,优化我方传感器对敌方干扰、欺骗等对抗措施的抗干扰能力,避免或减小敌方对抗措施对我方传感器探测的影响。
3) 发射控制。由于有源传感器发射的能量可被敌方侦测并被利用,需要控制有源传感器的发射功率、脉宽等信号参数及空间覆盖等,使我方传感器被检测或被识别的可能性降至最低。
(3) 引导协同
由于传感器的空间覆盖和搜索能力有限,当目标从传感器A的探测区域进入另一传感器B的探测区域时,需要向传感器B发送引导信息,使传感器B搜索并截获由传感器A指示的目标。如红外警戒探测设备与雷达协同,由雷达提供跟踪引导数据,红外警戒探测设备工作于跟踪状态,可以克服红外警戒探测设备视野小、搜索时间长的弱点,快速捕获目标、输出图像。又如电子侦察设备获得目标信号,基于基本分选参数和细微特征分析,对辐射源个体特征进行辨认和识别,解算出辐射源大致位置后可引导主动雷达进行高精度目标定位跟踪。
(4) 无源协同
无源传感器具有良好的隐身效果,是海上编队重要的传感器资源。雷达在受到敌方有源压制性干扰时将无法对目标继续探测,但ESM仍然能够获得辐射源的方位和属性信息,红外警戒探测设备能够探测目标的方位俯仰,雷达能够确定干扰源的方位俯仰,通过舰艇编队多平台无源传感器协同,在一定程度上能够达到对海战场的有效监视。
2 编队传感器管理架构
2.1 混合式体系结构
传感器管理体系结构一般与系统采用的信息融合体系结构相一致,常见的有分布式、分层式、集中式,如图3所示。
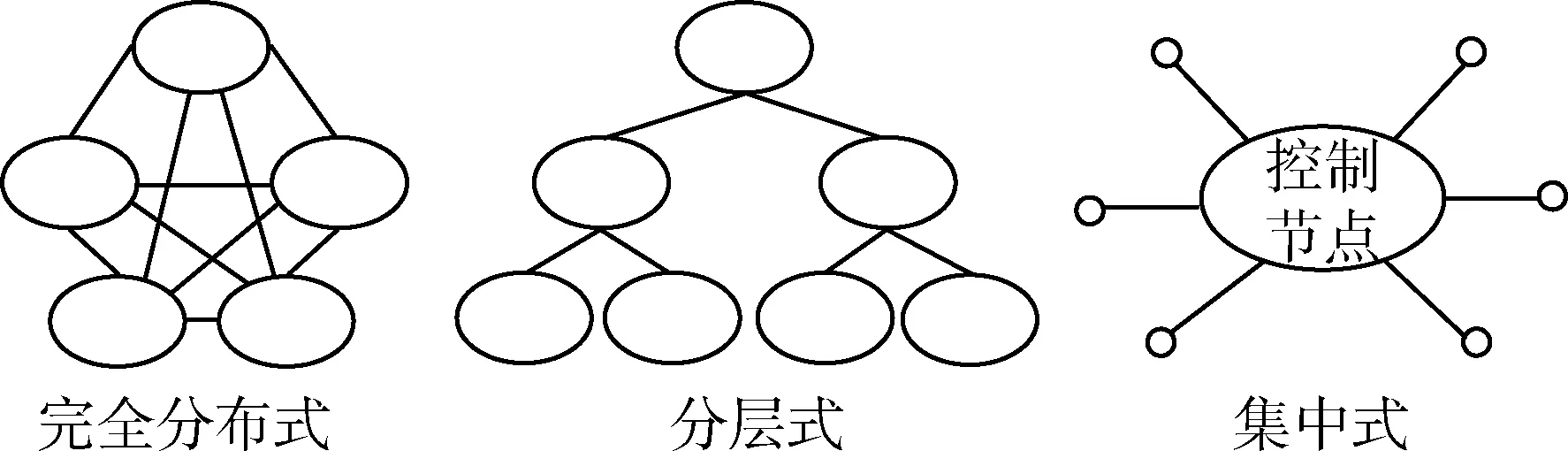
图3 传感器管理常用结构Fig.3 Common structures for sensor management
集中式是指所有传感器的管理由中心节点集中决策,该方式逻辑简单,但决策中心计算复杂、平台间通信需求大,决策中心易成为系统瓶颈,整体的抗毁性、可靠性、扩展性差。完全分布式是指传感器管理任务由多个处理节点协作完成,无中心节点,该方式对平台间通信需求大、分布式算法设计困难,最重要的是不符合海上编队分层的指挥结构。分层式结构是一种至上而下分解任务并分工协作的结构,与层次式指挥结构匹配,但严格的分层结构缺少灵活性,具有很多与集中式相似的缺点。
海上编队传感器管理的目标是使编队内传感器成为一个整体,具有任务级、参数级、信号级等多层次管控能力,编队、战术群、平台、传感器等多类管理节点分工协作,是系统之系统,单纯的分布式、分层式、集中式体系结构难以胜任。
作为典型的多平台多传感器管理问题,为适应舰艇编队分层的指挥模式和数据融合处理、信息传递结构,海上编队传感器管理总体上宜采用分层式结构。即编队级传感器管理主要负责确定战术群的传感器探测任务,战术群级传感器管理主要负责确定所属平台的传感器探测任务,平台级传感器管理主要负责本平台传感器应用,对舰载雷达、声纳、光电、IFF、ESM及配置的无人平台进行管理。
兼顾不同节点之间的协同关系,在分层式结构的基础上,应兼容部分节点之间的分布式、集中式关系,构建海上编队传感器管理的混合式结构,如图4所示。在某一层级内部可采用分布式或集中式结构。在同一层级,节点之间可分布式协同,如无人集群;在某一节点内,如舰艇平台可采用集中式的传感器管理结构,由传感器管理中心节点对本舰所有传感器集中管控。
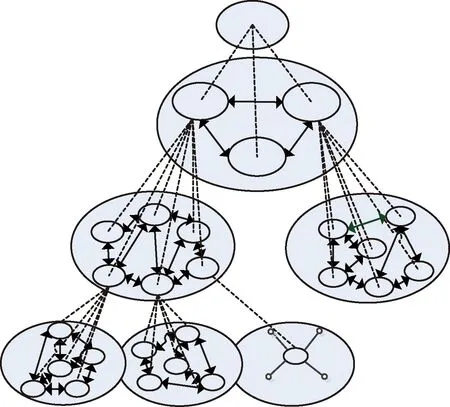
图4 混合式编队传感器管理体系结构Fig.4 Hybrid formation sensor management architecture
海上编队传感器管理的混合式结构是分层、递归的,如图5所示,上级节点将下级节点作为一个整体管控,下级节点再将次级节点作为一个整体管控,即编队级传感器管理对象可以是战斗群或平台,战斗群传感器管理可再分解成对平台的管理,平台级传感器管理再对单传感器管理。

图5 编队传感器管理的分层递归性Fig.5 Hierarchical recursion of formation sensor management
2.2 事前规划与实时调度
海上编队传感器管理包括作战前方案规划和作战中实时调度2个方面,如图6所示。在战前,根据作战筹划模块的作战计划、情报保障需求等,制定传感器使用方案并反馈作战筹划模块。在作战过程中,根据信息融合模块提供的目标、态势分析结果、探测需求,以及指挥控制模块的传感器管理命令、情报保障需求实时决策传感器调度策略,向传感器、作战平台等管控对象下达传感器管理指令。
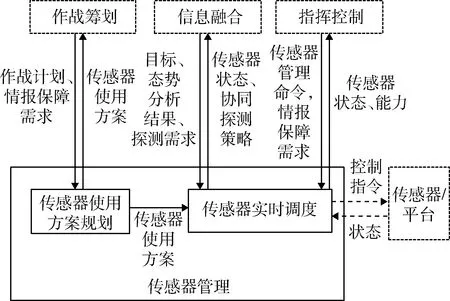
图6 传感器管理功能关系图Fig.6 Function relationship diagram of sensor management
2.2.1 传感器使用方案规划
传感器使用方案规划功能主要在编队、兵力群节点实现,在作战准备阶段的作战方案筹划过程中,负责根据作战计划和情报保障需求,筹划管理对象(兵力群、平台或传感器)的探测任务、计划,生成传感器使用方案。
传感器使用方案规划处理流程如图7所示。首先根据作战任务、计划分析探测任务,按照兵力群、探测空间等维度分解总探测任务,然后筹划每个子探测任务方案。

图7 传感器使用方案规划流程图Fig.7 Flow chart of sensor use scheme planning
传感器使用方案规划的输入主要包括以下4个方面。
(1) 雷达、ESM、IFF等传感器的工作性能参数,如雷达参数:
1) 具有的工作模式;
2) 各工作模式下,对不同雷达散射截面积(radar cross secrion,RCS)目标在规定的探测概率条件下的作用距离;
3) 方位、仰角的覆盖范围;
4) 各工作模式下,目标测量精度、数据率;
5) 抗干扰措施;
6) 设备开机时间;
7) 目标处理容量。
(2) 作战计划,包括兵力编成、可用传感器资源组成及位置、我方作战意图(作战地域、阶段划分、编队队形、平台运动的预定路线、威胁方向、打击目标区域等)、编队频谱管理计划等。
(3) 情报保障需求:可由操作员设置的重点探测方位、侦察区域,重点探测目标类型,信息质量要求等。
(4) 战场态势:地形(高度地图)、气象等环境信息、敌方已被侦察目标的可能位置及威胁等级(我方目标被发现或受打击的风险)。
传感器使用方案规划的结果为传感器使用方案,内容包括:
(1) 阶段划分;
(2) 每个阶段内的平台/传感器工作计划列表,包括平台/传感器名称、开始/结束时间、对空/对海传感器工作模式、可用频率等;
(3) 每个阶段内的探测预案,在出现隐身飞机、低空突防目标等情形下,编队传感器的调整方案;
(4) 专用探测平台(直升机、无人机)的配置、航路规划。
传感器使用方案规划应在满足约束条件,尽量满足情报保障需求的基础上优化传感器效能。典型的约束条件包括:只使用编队内可用的传感器资源;以编队作战方案中确定的队形、航路为基础;主动传感器的使用需满足编队频谱管控要求,在需电子静默时,主动传感器关机;主动传感器使用规定的频率段;避免我方主动传感器之间的干扰,对于无编队使用模式的同型雷达需在一定的间距外才能使用同一频率,在一定的间距内要错开频率。规划的方案需满足编队作战情报保障需求,如对空中目标的探测覆盖范围、质量满足对空作战需求;对水面目标的探测覆盖范围、质量满足对海作战需求;对空、海目标具备识别能力;传感器配置预留反隐身、反低空目标能力。优化传感器效能的目标是多样化的,如雷达主动辐射时间最短、预警时间最长等。
2.2.2 传感器实时调度
在作战过程中,传感器管理模块一方面基于审核后的传感器使用方案组织传感器工作;另一方面根据作战过程中的态势变化,基于事件动态调度传感器,事件分成优化目标感知、信息对抗2类,包括响应信息融合模块的反馈、满足协同探测要求、反侦察、反辐射攻击、反低空突防、反隐身目标、反电子干扰、传感器战损、通信中断、战场气象条件变化等。在战场态势演变、干扰对抗过程中,舰艇编队传感器需适时调整,一方面保证对抗中传感器有效工作,另一方面提高编队传感器的搜索、跟踪、识别、作战支持能力,其处理过程如图8所示。
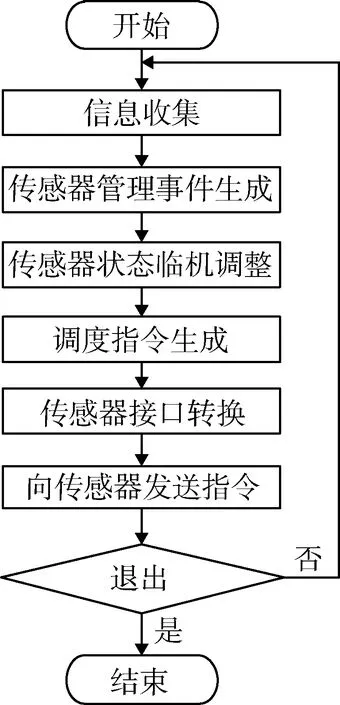
图8 传感器作战管理流程图Fig.8 Flow chart of sensor operation management
传感器实时调度的输入元素与传感器使用方案规划基本相同,不同之处在于传感器状态、环境信息、目标态势、作战计划、电磁干扰等信息是实时的。
传感器实时调度的输出为传感器工作调整指令,如编队内传感器开关、工作模式切换、分配任务、探测平台航路更新等。
传感器实时调度中,需满足一系列约束条件,如:
(1) 主动传感器的使用需满足编队频谱管控要求:在需电子静默时,主动传感器关机;主动传感器使用规定的频率段。
(2) 考虑实际的地理约束条件、气象及通信条件。
(3) 考虑敌方实施的有源、无源干扰。
(4) 考虑我方主动传感器、电子干扰对我方传感器的影响。
(5) 工作频率有重叠的雷达部署间距不能太小,避免同频干扰。
在此基础上,应满足情报保障需求,对已发现的目标,评估目标的传感器探测需求,对重点目标应尽可能连续可靠探测及稳定跟踪,识别目标身份;保证对未知目标的预警能力,使传感器网的探测范围尽可能地大,尽可能早地探测到隐身飞机、低空目标,增大预警距离,延长预警时间;选取合适的责任区域雷达冗余覆盖数量,以提高反隐身能力;重点区域应尽可能地全部覆盖。
传感器实时调度可选的优化目标众多,如在需辐射控制时,尽量减少雷达主动辐射;优化编队被动协同探测能力;优化编队主被动协同探测能力;在责任区域内雷达对同一地域的重叠覆盖数目不宜过多。
传感器实时调度的核心在于传感器状态临机调整决策,采用基于事件驱动的传感器作战管理技术,解决传感器调整事件检测和处理的问题,功能框图如图9所示。
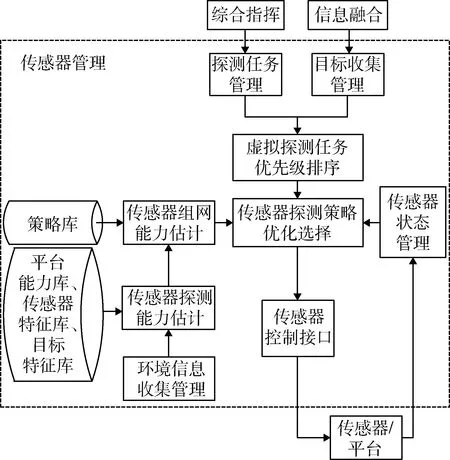
图9 事件驱动的传感器作战管理技术框图Fig.9 Block diagram of event driven sensor operation management technology
根据信息融合的反馈以及综合指挥部位判明战场态势确定传感器管控事件,在分析排序后,分类为传感器状态调整、传感器探测2类事件分别处理。优先响应传感器状态调整事件,主要是反干扰、反侦察、反辐射攻击等对抗事件,根据作战条例、命令等调整传感器的开关、工作频率等;响应传感器引导、识别、传感器协同等传感器探测事件时,首先根据当前环境和传感器模块预测各传感器的可用性和能力,进而评估编队整体传感器探测效能,对照作战活动情报需求,分析传感器探测的薄弱环节,输出传感器开关、工作模式切换等调度指令,以提高传感器探测效能。
各处理模块的功能如下:
探测任务管理:接收上级下达、指挥员人工指定的探测任务,根据作战任务分解传感器探测任务。
目标收集管理:接收目标综合态势,分析目标信息完整性及威胁,生成需调用传感器资源进一步探测识别的目标。
虚拟探测任务优先级排序:根据探测任务及需进一步探测识别的目标生成虚拟探测任务,并根据目标威胁等排序。
环境信息收集管理:收集管理战场地理、气象、电磁干扰等信息。
传感器探测能力估计:根据传感器的物理特性、目标特性、战场环境估计传感器的探测能力。
传感器组网能力估计:根据传感器组网应用策略,在单传感器探测能力估计基础上,计算传感器组网后的虚拟探测任务探测效能。
传感器探测策略优化选择:根据虚拟探测任务的探测效能及优先级,优化选择最佳传感器探测方案。
传感器状态管理:接收传感器的工作状态参数,汇总传感器状态表。
传感器控制接口:将确定的传感器工作要求,转换成符合传感器接口的规范管理指令,并下发执行。
3 结束语
本文分析了海上编队传感器管理需求,研究了海上编队传感器管理总体架构,是海上编队传感器管理的顶层设计。编队传感器管理由编队、战术群、平台等多层级节点构成,需分布协同工作共同支撑编队传感器资源高效管理,混合式结构下的协同工作机制是编队传感器管理有待深入研究的关键技术。传感器管理包括事前规划和实时调度2个方面,核心是传感器任务分配、调度等算法,国内外对此开展了广泛研究,但设计满足海上编队多异类平台,特别是未来无人装备参与下的传感器管理算法是有待开展的挑战性工作。
