靶场中多飞行目标的航迹保持*
2021-03-23李兴红张聆玲
李兴红,张聆玲,杨 琴
(1.成都理工大学工程技术学院,四川 成都614007;2.核工业西南物理研究院,四川 成都610000)
随着电视监视环境的复杂性不断增强,测量系统面临的困难也逐渐增多。 尤其是靶场中多飞行目标会面对各种多传感器的干扰及多飞行目标本身在飞行过程中的交叉等干扰,使得传感器获取的图像数据失去准确度,无法判断目标击中的正确性。 传统的雷达、电视、红外、可见光等测量方法无法适用当前的多飞行目标测量系统。 因此,系统通过多传感器输出的信息,克服各种干扰因素的影响,再通过编程设定行为准则来确定飞行目标的起点位置,在目标整个飞行跟踪测量系统中保持航迹稳定。
1 提取目标特征
在靶场飞行目标跟踪测控过程中,时常出现飞行目标的信噪比很低的情况,这样目标会被噪声淹没而无法提取,因此系统首先利用双正交小波的线性相位,紧支撑性,分解重构时无相位失真等优点提取飞行目标的图像特征,作为后续的目标编排序号的基础。
在靶场实验中以某10 位灰度级的空中图像为研究对象,原始图像图1(a)中有两个无法识别的弱小目标,由图中可知,图像中的信噪比较低。 系统分别采用三种方法对目标进行特征提取,效果如图1 所示。

图1 利用不同检测方法对目标的特征提取效果

2 多目标跟踪的数据关联算法
靶场中有多种类型的目标,其中,如果监测目标只有一个,则目标的相关波门内只有一个点迹,这样只需要考虑跟踪问题即可,但如果监测目标是多个,那么就会有多个点迹落入单个目标相关波门内的情况,这样就要考虑数据关联的问题。 也就是说当测量目标出现后,系统在对目标进行自动识别建立序号的同时,也要在整个测量过程中保持该目标的序号一直不变。 系统利用多参数的数据关联方法对多个目标状态更新,以达到抑制多个目标相互干扰的目的。
因此对于多目标的跟踪测量系统,首先要对新的飞行目标进行编排序号并且保持序号维持过程,系统对目标序号的建立及保持采用如图2 所示的判别准则。

图2 目标序号的建立及保持的判别准则
传统的数据关联算法很多,如概率数据关联算法(PDA)、最近邻域算法(NNDA)、联合概率数据关联算法(JPDA)等。 在传统的算法当中,最简单的当属NNDA 算法,但只适用于在稀疏回波环境中跟踪非动态目标,PDA 算法是一种次优滤波方法,对于杂波环境中单个目标的跟踪处理比较适合,JPDA算法类似于PDA 算法,两者略有不同,JPDA 算法认为所有的有效回波都可能源于每个特定目标,但源于不同目标的加权不同,因此,当目标和量测数目较多时,JPDA 算法的计算量会呈现组合爆炸现象,造成计算复杂。 为了避免上述算法的不足,系统将空间位置关联度,亮度近似度等多参数数据关联,根据不同目标与确认波门内各观测值的后验概率密度赋予不同观测值的更新量不同加权值,从而不断更新目标状态,计算量及准确性有极大的提高。 其算法的实现过程概括如下:
(1)构造确认矩阵Ω=[ωjt]


式中:t=0,1,2,3 为目标编号,j =1,2,3,4 为观测值编号。

图3 目标确认波门与观测值的分布情况

(4)计算处于波门相交区域内的观测值j 分属于每个目标t 的修正概率
如果观测值j 同时落在多个目标波门内,可以通过修正系数Kjt(式(4))降低该观测值分属于各个目标的后验概率密度。 同时计算拥有公共观测值的目标各自关联门内的其他观测值对Kjt的影响。影响因子gjt如式(5)定义:

式中:t =1,2,…,N,由于gjt的影响,因此需要对Kjt再次修正:
(5)当一个目标波门内出现多个观测值时,计算其各个观测值与该目标的空间位置关联度,亮度近似度





将上述多参数数据关联算法的步骤引入实验,系统通过实验,比较以上三种算法的飞行目标跟踪的准确率。 通过对比,从而表明文中提出的多参数数据关联算法的实用性。
3 实验结果
当图像的背景均方差MSE<4.0 和在4.0 ~5.0之间两种不同情况下的比较数据,如表1 和表2,其中两种情况的实验次数各为200 次。

表1 背景MSE<4.0,飞行目标跟踪的准确率
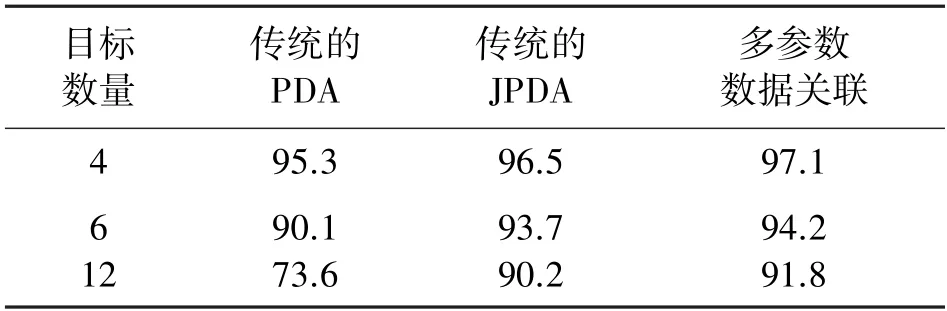
表2 背景MSE 为4.0~5.0,飞行目标跟踪的准确率
通过表1 和表2 可以发现:对4 个飞行目标进行测量时,在背景MSE 较低时(<4.0),采用多参量数据关联算法的目标编号保持的准确率相对于传统的PDA 和JPDA 算法的目标编号保持要高,准确率为98.6%,完全满足要求;在背景MSE 升高时(4.0 ~4.5),图像的分辨率降低,同样4 个目标测量,多参量数据关联算法的准确率为97.1%,也高于传统的PDA 和JPDA 算法;而当目标数量增加时,无论何种情况何种算法,其准确率均有所下降,但多参量数据关联算仍是算法中准确率最高的。
将上述过程通过程序写入到以TMS320C6657为核心的DSP 控制系统中,并且对靶场中多目标进行测量,通过图4 可以得到目标序号建立后能够保持直到序号离开视场。

图4 多目标序号在视场中的建立及保持
4 结论
系统对靶场中多飞行目标进行跟踪测量,首先利用双正交小波提取飞行目标的图像特征,再通过多参数的数据关联方法对目标进行编写序号及保持,通过实验可以看出,在目标数量高达12 个时,即使背景的MSE 增加,图像的分辨率降低,目标保持的准确率还可以达到91.8%,最后利用程序将上述过程下载到以TMS320C6657 为核心的DSP 控制系统中。 通过实验可以看出,上述过程完全可以达到多飞行目标的跟踪及序号保持,并且其准确率较高,比传统的PDA 算法提高23.29%。
