一种振动传感器带内不平度补偿方法*
2021-03-23张丽梅冯玉志畅彦祥
郭 涛,张丽梅,冯玉志,畅彦祥
(1.中北大学电子测试技术国家重点实验室,山西 太原030051;2.北京宇航系统工程研究所,北京100076;3.陆军装备部驻北京军事代表局某代表室,北京100076)
航天器在飞行过程中伴随着剧烈的振动,而剧烈的振动会破坏航天器的运行状态甚至缩短设备的使用寿命。 实时监测航天器的振动响应能够相对准确反映航天器的运行状态。 因此,采集必要的结构振动信息成为航天器飞行过程健康监测中的重要环节[1-4]。
作为航天器状态和性能监测的重要工具,振动传感器的性能指标直接影响着航天器高精度的发展。 振动传感器技术指标包括灵敏度、线性度、迟滞、重复性、频响范围、带内不平度等,每一个指标的好坏都直接影响振动传感器的整体测量精度。 传感器性能的优化可以通过传感器调理电路设计、传感器敏感芯体结构优化等方法来实现[5-8]。 本文针对1221L-1K0 型号加速度传感器在4 kHz 附近频率“上翘”,带内不平度不满足小于1 dB 使用要求的问题,提出一种带内不平度补偿方法,补偿后的振动传感器经试验测试标定,带内不平度小于1 dB。
1 系统硬件组成
振动传感器系统由1221L-1K0 加速度传感器、放大电路、滤波电路、带内不平度补偿电路、输出饱和控制电路、电源电路以及输入输出接口电路构成,其系统框图如图1 所示。
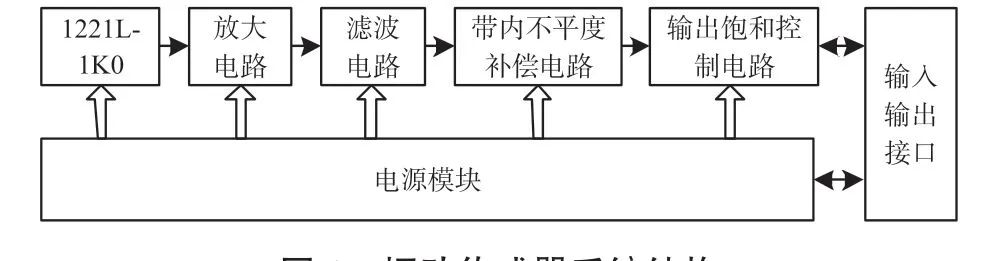
图1 振动传感器系统结构
1221L-1K0 加速度传感器将感受到的加速度信号转化为电压信号,经过放大、滤波后再经过带内不平度补偿电路,将4 kHz 附近上翘部分补偿平坦,使最终输出的信号在4 kHz 通带内不平度小于1 dB。 当传感器输出异常时,输出饱和控制电路能保证其最终输出的电压在技术指标规定的范围内。
1.1 1221L-1K0 加速度传感器
1221L-1K0 加速度传感器是SILICON DESIGN公司研制生产的电容式加速度传感器,该传感器具有抗冲击能力高、噪声低、稳定性好的特点,量程为±1 000 gn,灵敏度为2 mV/gn,抗冲击能力大于2 万gn,具有从直流开始的极低频率响应,常被用于航空航天领域的振动测量[9]。
1221L-1K0 加速度传感器芯片的频率响应范围为0~4 kHz 内小于3 dB,随机选取其中4 只传感器,如图2 所示,编号分别为506933、506935、506937 和506917,依次记为样本(a)~(d),其频率响应曲线分别如图3(a)~3(d)所示,部分频率点的带内不平度见表1(参考频率100 Hz),可见传感器在4 kHz 频率点带内不平度在1 dB~3 dB 范围内。 为了满足航天某型号4 kHz 内小于1 dB 的使用需求,对其进行补偿设计。 根据芯片资料[10],其外围电路如图4 所示。
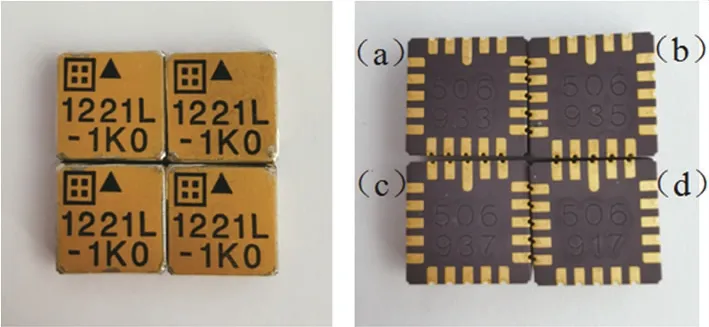
图2 1221L-1K0 加速度传感器实物图
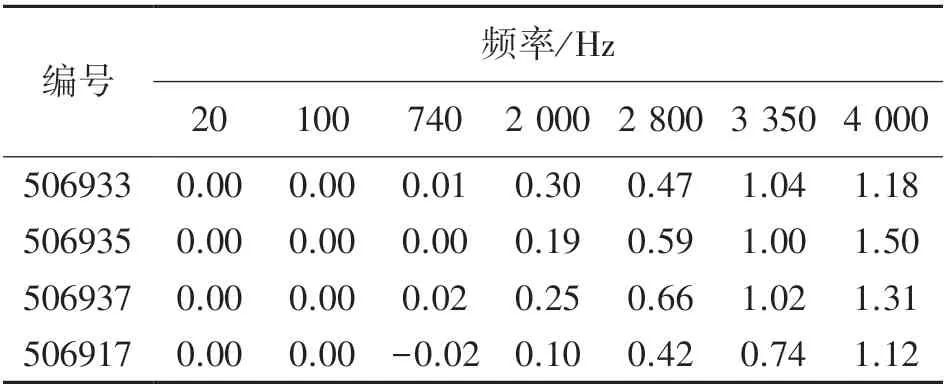
表1 补偿前传感器带内不平度 单位:dB
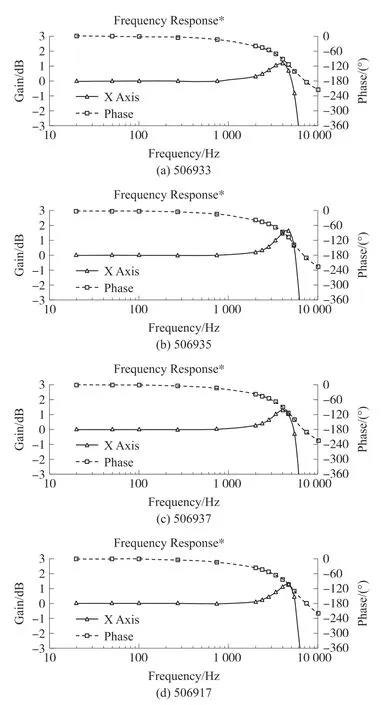
图3 1221L-1K0 加速度传感器频响曲线

图4 1221L-1K0 加速度传感器外围电路
1.2 信号调理模块部分电路设计
信号调理模块对1221L-1K0 加速度传感器输出的信号进行处理,主要包括放大电路、滤波电路、输出饱和控制、电源电路等模块。
1.2.1 放大电路设计
1221L-1K0 加速度传感器为差分输出,所以使用AD623 仪表放大器对信号进行放大,同时在仪表放大器的VREF端提供2.5 V 基准电压,将输出信号调整为2.5 V 基准,满量程输出范围为0 ~5 V 的信号。AD623 的放大倍数计算公式见式(1),1221L-1K0 本身的输出范围是0.5 V ~4.5 V,计算得放大倍数为1.25 倍,放大电阻RG选用400 kΩ 精度为1%的金属膜精密电阻。 放大电路如图5 所示[11]。

式中:G 为放大倍数,RG是用来调节放大倍数的放大电阻。
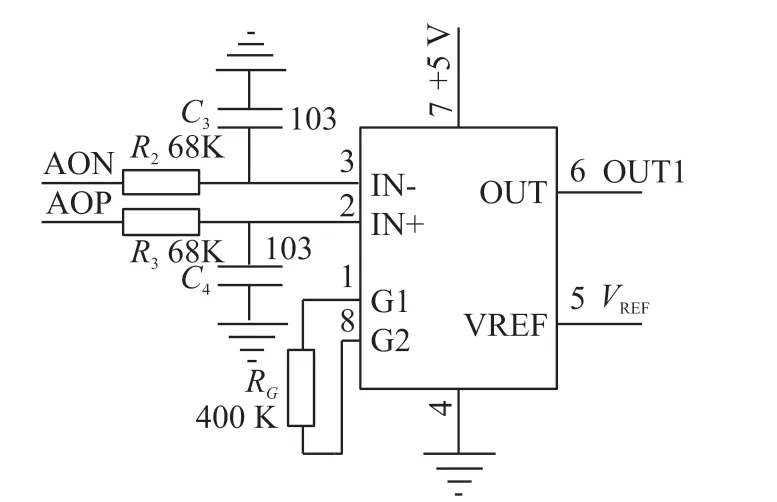
图5 放大电路
1.2.2 滤波电路设计
滤波电路采取低通滤波对信号进行4 kHz 低通滤波处理,滤除高频干扰成分。 滤波芯片采用MAXIM 公司的MAX291,它为巴特沃斯八阶低通滤波器,该类型滤波器增益稳定,适用于整个通频带内增益恒定的场合[12],符合设计要求。 图6 为低通滤波电路,通过调节外部电容Cosc来调整其截止频率,计算公式为:
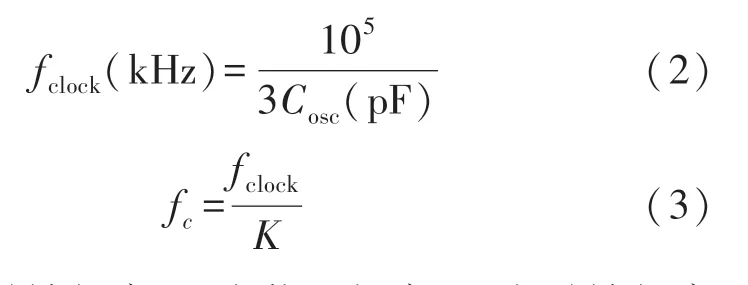
式中:fclock为时钟频率,fc为截止频率,K 为时钟频率和截止频率之比,且K =100。 经过计算与实验,4 kHz 截止频率所需Cosc容值约为80 pF,设计中使用CO1和CO2并联得到80 pF。
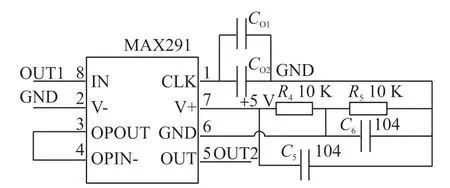
图6 低通滤波电路
1.2.3 输出饱和控制电路
输出端使用MM3Z5V6 稳压二极管进行钳位保护,当输出电压在大于5.6 V 时,稳压二极管将输出电压稳到5.6 V,使其不会对后续电路因电压过大而损坏。 输出饱和控制电路如图7 所示。

图7 输出饱和控制电路
1.2.4 电源电路
系统所使用外部供电为+15 V 电压,用来给运放供电,AD623、MAX291 和1221L-1K0 芯片均为5 V 供电,故选用LT1761-5.0 转为+5 V 给芯片供电,同时使用LM136-2.5V 将电压转换为2.5 V 给1221L-1K0和AD623 提供基准电压。 查询主要器件耗电电流,设计中使用2 个LT1761-5.0 芯片并联可满足系统供电。 供电模块前后级均使用贴片陶瓷电容进行滤波,使电源抗噪声能力增加,系统寿命更持久。
1.3 带内不平度补偿电路设计
经过研究1221L-1K0 加速度传感器的频率响应曲线,它在1 kHz~4 kHz 呈缓慢上翘趋势,其上翘速度与一阶低通滤波电路的衰减速度接近,故选用一阶低通滤波器对其进行补偿,一阶无源RC 滤波电路简单,但带负载能力差[13],故本设计采用一阶低通有源滤波电路,电路设计如图8 所示,为了使其同时具有放大功能,把电压跟随器设计为同相比例运算电路。
图8 一阶低通有源滤波电路
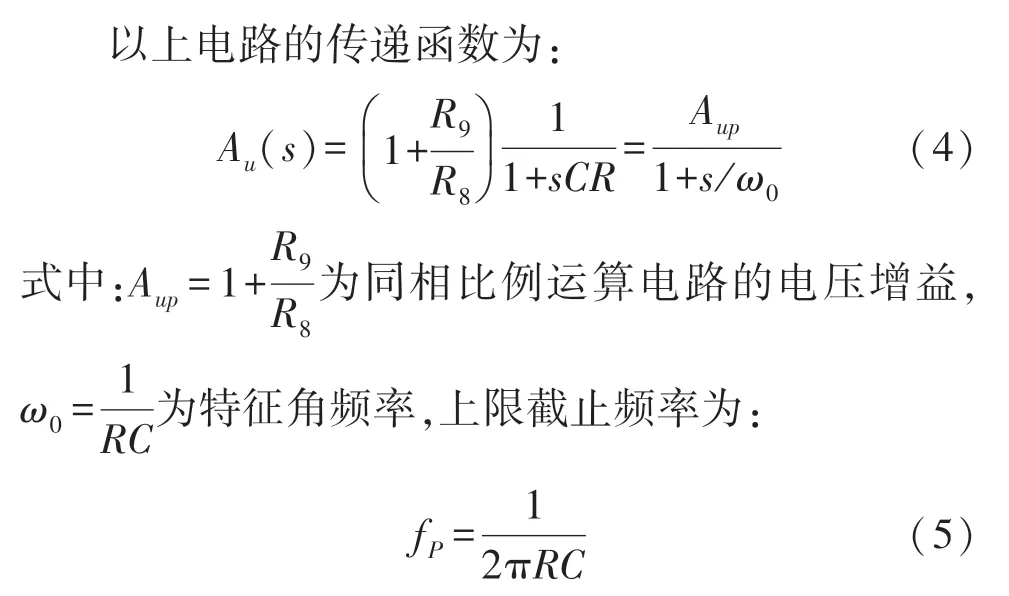
根据1221L-1K0 传感器的补偿需求,截止频率在4 kHz 下降1 dB~3 dB,首先选取C 的值,C 值不宜过大,一般≤1 μF,本设计中,选取C 值为0.01 μF,经过计算和仿真,要使4 kHz 附近衰减1.18 dB、1.50 dB、1.31 dB 和1.12 dB,R 值的选取分别为2.2 kΩ、2.52 kΩ、2.33 kΩ 和2.14 kΩ,Multisim 软件中的仿真结果如图9(a)~9(d)。 本设计中因前端已有仪表放大电路,故该补偿部分不需要再次放大,设计中选用R9为1 kΩ,R8为510 kΩ。
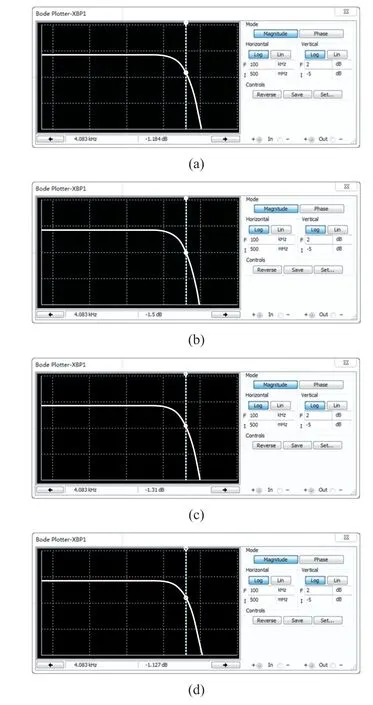
图9 低通滤波电路仿真图
2 实验
使用B&K 3629 传感器校准系统对四个调理补偿后的传感器进行10 Hz~6 kHz 扫频标定,得到的扫频曲线分别如图10(a)~10(d),选取部分频率点的带内不平度如表2 所示,可见,补偿调理后的传感器在4 kHz 内不平度小于1 dB(参考频率100 Hz),满足设计要求。

图10 补偿后的扫频曲线
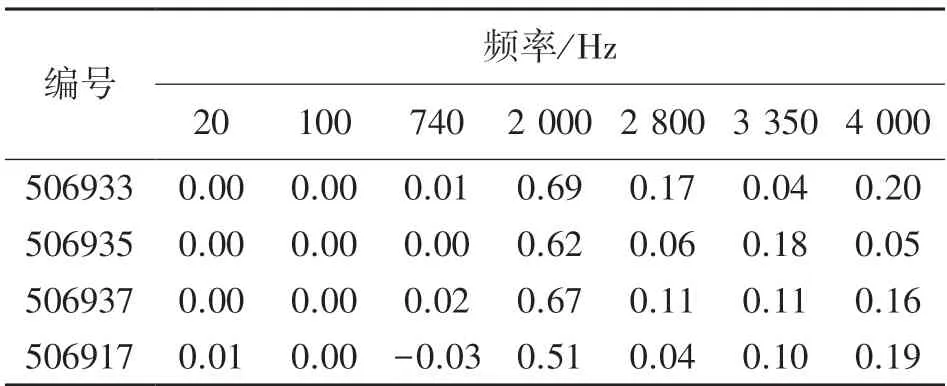
表2 补偿后传感器带内不平度 单位:dB
3 结语
本文以1221L-1K0 加速度传感器为例,详细说明了它在4 kHz 附近的带内不平度补偿方法。 通过Multisim 对补偿方法进行仿真验证,补偿设计只需根据4 kHz 点的衰减情况进行分析计算,选取适当的阻容值,并根据传感器实际的“上翘”速度决定其补偿电路选用的阶数。 对其中4 只传感器进行试验测试,测试结果表明此方法有助于带内不平度补偿的设计。 同时,该方法同样适用于类似加速度传感器的带内不平度补偿。
