用于GPS 天线相位中心检测的时间同步自动旋转装置*
2021-03-23赵立军李文一程昱博苏国营刘承宇史永明
赵立军,李文一,韩 勇,程昱博,苏国营,刘承宇,史永明,刘 浩
(1.中国地震局第一监测中心,天津300180;2.重庆大学—辛辛那提大学联合学院,重庆400044)
全球定位系统(Global Positioning System,GPS)观测作为一种重要的大地测量手段,已被广泛应用于地球动力学研究和高精度地壳形变监测[1-2]。 在野外作业地震监测中一般使用扼流圈天线接收卫星信号[3],将微波天线的电气中心称为天线相位中心(Antenna Phase Center,APC),其理论设计应与天线几何中心(天线参考点,Antenna Reference Point,ARP)一致,但由于机械误差和电磁特性等的影响,天线相位中心和几何中心会存在一定的偏差,称为相位中心偏移(Phase Center Offset,PCO)[4-6],研究表明该偏差可达mm 级[7]。 因此为了提高观测结果的可靠性和准确性,必须对天线的相位中心偏移进行检测[8-10]。
天线相位中心检测一般使用旋转天线法[11-12]:将被测天线与参考天线在室外组成超短基线,参考天线固定指北,被测天线分别指北和指南各观测一个时段,通过两时段北、东方向上的的超短基线向量差计算天线的相位中心偏移向量。 旋转天线法方法简单、便于操作,通过将天线架设在测绘标准基座上实现天线的旋转,因此作为标准方法被广泛使用[13-14]。 但对于高精度地壳形变监测,该方法检测误差较大:
(1)测绘标准基座在旋转和锁紧的过程中存在可达mm 级的回转误差,影响相位中心检测精度;
(2)人工旋转基座时天线的指向角度会存在较大误差,影响检测结果的准确性;
(3)天线不同指向方向的观测数据均处在不同时段内,两组观测数据中本身就存在较大的观测误差,不同时段的多路径效应也存在差异。 对于人工旋转天线的传统方法,该误差无法降低。

图1 架于测绘标准基座上的扼流圈天线
为解决上述问题,提高GPS 天线相位中心检测的精度,研制了一种时间同步自动旋转装置。 本文将分别从机械结构、控制系统、不确定度分析等方面对该装置进行介绍,并结合实验分析其在GPS 天线相位中心检测中的应用效果。
1 装置介绍
1.1 机械结构
利用步进电机闭环控制系统、齿轮传动机构和回转支撑轴承设计了用于GPS 天线相位中心检测的自动旋转装置,以提高被测天线旋转的回转精度和指向精度。 装置机械结构如图2 所示。
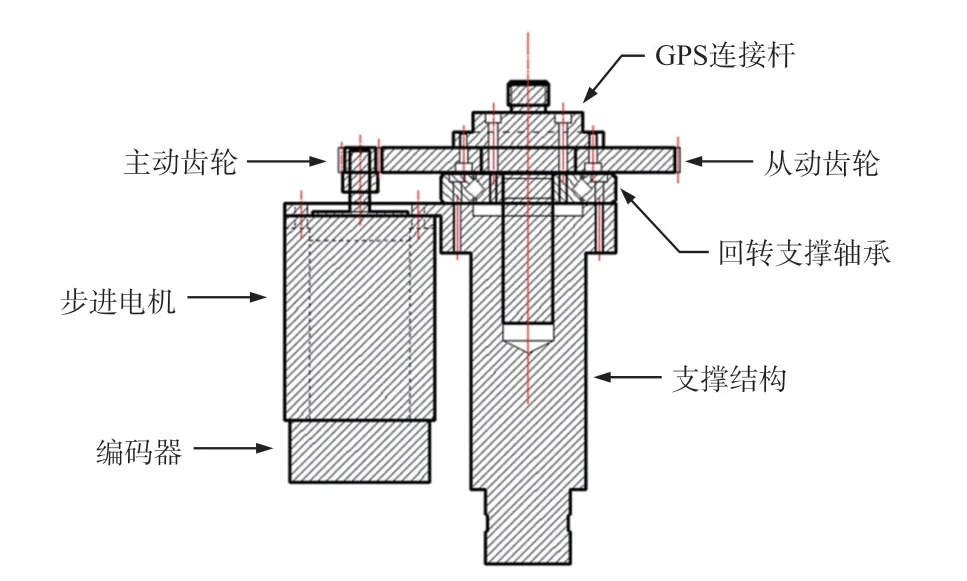
图2 自动旋转装置装配图
支撑结构底端设计为紧固凹槽,便于与标准测绘基座的连接与锁紧,借助基座自身的水准器和脚螺旋实现装置的整平,圆水准器整平精度优于8′/2 mm。
回转支撑轴承是装置执行旋转运动的核心部件,其具有承载能力强、旋转精度高、使用寿命长的优点。 选用P5 级高精度轴承,其最大径向间隙为0.02 mm,内圈跳动精度(轴向和径向)优于2 μm,内环旋转精度(内环径向振摆的公差)优于4 μm,为天线旋转提供了归心精度和稳定性保证。
轴承的外圈固定在支撑结构上,轴承内圈与从动齿轮、GPS 连接杆同轴心相连接。 GPS 连接杆顶端为测绘仪器美制5/8″-11 标准螺纹接头,以固定被测天线,其底部光轴与轴承内圈的配合间隙小于0.02 mm,连接杆加工同轴度优于0.01 mm。 GPS 连接杆与轴承内圈共同组成被测天线的旋转轴,可在电机的驱动下随从动齿轮自由旋转。
步进电机使用60 型步进电机,静扭矩为3.0 Nm,步进角1.8°,固定在支撑结构上。 步进电机下端同轴连接编码器,对电机的转动角度进行反馈,编码器采用增量式光电旋转编码器,分辨率为1 000脉冲/转(即0.36°)。
步进电机通过其转轴上的齿轮传动结构驱动GPS 连接杆带动被测天线旋转。 主动齿轮采用15齿锻钢齿轮,从动齿轮采用120 齿尼龙齿轮,可以有效降低或防止齿面磨损、轮齿啮合过紧、齿轮热变形等现象的发生,提高装置使用寿命和稳定性,同时使装置承载能力满足GPS 扼流圈天线(最大质量为20 kg)的需求。
1.2 控制系统
控制系统以单片机控制器为核心,通过IO 口发送信号至电机驱动器以驱动步进电机转动。
步进电机驱动器设置为2 细分模式,则电机的旋转步进角为0.9°,通过齿轮传动至GPS 天线的步进角为0.112 5°,同时通过编码器将电机的相对旋转角度反馈至单片机控制器实现对旋转角度的闭环控制,以达到相位中心检测所需的旋转角度精度。
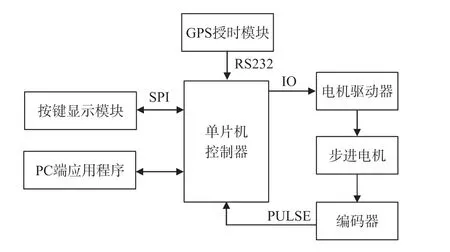
图3 控制系统框图
使用者通过按键显示模块可对装置进行现场操作,并实时观察装置运行参数和运行状态。 运行参数主要包括旋转的时间序列和角度序列。 同时装置还设置了可与电脑通信的串行接口,并规定了通信协议,使用者也可以通过PC 端应用程序对装置运行参数进行设置,程序界面如图4 所示。
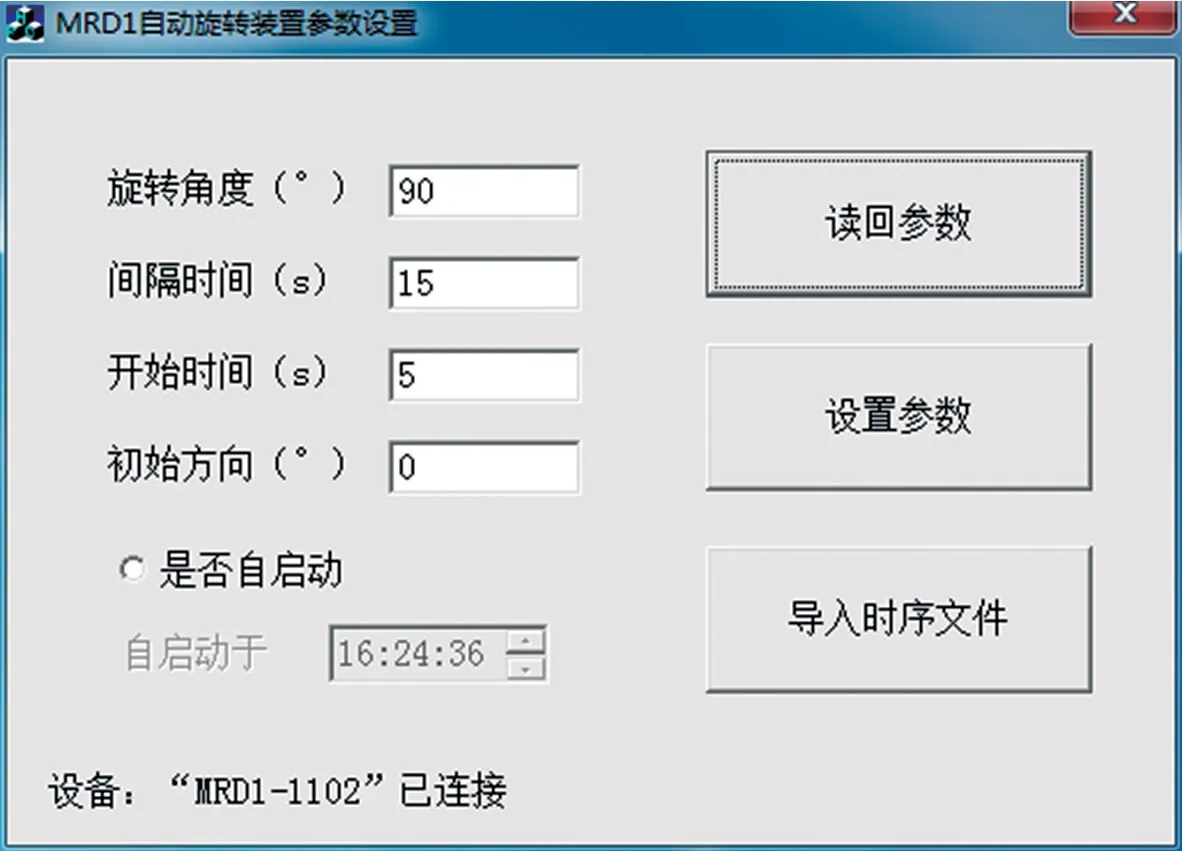
图4 PC 端控制程序界面
在相位中心检测中,由于接收GPS 观测数据需在天线固定(不旋转)时完成,为使接收GPS 数据与天线旋转保持一定的时间间隔,使用GPS 授时芯片实现装置与GPS 标准时间的时间同步,从而控制装置旋转的时间,避免旋转对GPS 接收静态观测数据的影响。
GPS 授时芯片选用GPS 授时模块采用以MT3329 卫星定位接收芯片为核心的小型接收机和天线,通电后自动锁定卫星并接收GPS 信号。 其通过串行接口连续向单片机发送数据,数据更新频率为10 Hz。 数据指令遵循NMEA-0183 标准格式,包括全球定位数据、大地坐标信息、UTC 时间和日期等信息,其中时间精度为0.1 μm,检测过程中GPS天线的旋转以此时间为基准。
采用GPS 授时芯片后,天线旋转运动和GPS 卫星信号采集时间将被分隔,可以实现被测天线在观测时段内的高频率周期性连续自动旋转,使天线各指向方向的观测数据均在同一时段内得到,从而有效减小多路径效应等观测误差的影响,从方法上提高天线相位中心的检测精度。
2 装置不确定度分析
GPS 天线相位中心偏差分别以偏差向量在北、东两个方向上的投影表示,本文仅对北方向的测量不确定度进行评定,东方向与其相同。
天线相位中心偏差的数学模型为:

式中:Δd 为天线相位中心偏差;DN为天线指北观测的超短基线向量在北方向上的投影;DS为天线指南观测的超短基线向量在北方向上的投影。
考虑不确定度的来源主要由GPS 观测误差、天线整平误差、以及装置回转误差。
(1)GPS 观测误差
对于GPS 观测数据,实验中各天线指向的观测均在同一时段完成,多路径效应、卫星星历、气象条件均保持一致,因此只考虑GPS 接收机分辨力所引入的误差,对于差分GPS 其水平方向最大标准偏差为0.25 mm,故其标准不确定度分量为:

(2)天线整平误差
对于8′/2 mm 精度的水准器,其天线整平误差一般为4′,则当天线相位中心偏移为5 mm 时,其引入的最大余弦误差为
Δ2=L(1-cosα)=5×(1-cos4′)≈0(mm)
故引入的标准不确定度为:
u2=0(mm)
(3)装置回转误差
综合考虑轴承的各项误差和GPS 连接杆与轴承的同轴偏差,天线旋转的最大同轴误差为0.056 mm,故其标准不确定度分量为:

取包含因子k =2,系统扩展不确定度U =0.30 mm。
3 相位中心检测实验
利用该装置进行了天线相位中心检测实验,实验场地为单位楼顶GPS 观测墩,观测墩周围无强电磁信号干扰,点位环视高度角15°以上应无障碍物。参考仪器与被检仪器均为Trimble 公司的NetR9 型GPS 接收机,天线均为TRI59800 型扼流圈天线。 实验现场如图5 所示。

图5 相位中心检测现场
检测过程中,自动旋转装置安装在测绘仪器标准基座上,通过基座固定在GPS 观测墩上并整平。被测GPS 天线架设装置上,与参考GPS 设备组成距离超短基线。
GPS 设备采样间隔设置为30 s,高度截止角15°。 将装置的旋转周期定位1 min,每个旋转周期内分别指向北南方向各2 次,连续观测24 h,运行情况如表1 所示。
通过此方法进行天线相位中心检测,相当于被测天线在两个指向方向中分别以30 s 的采样间隔进行观测,观测量与传统方法一致。 而通过高频率旋转使各方向的观测均在同一时段内完成,从而有效减小观测误差和多路径效应对观测结果的影响。

表1 天线旋转时序表
数据计算及结果:解算北南两个指向方向下超短基线向量,通过其在北东方向上的向量偏差可以得到天线的相位中心偏移。 通过重复实验,该装置和方法检测天线相位中心的标准偏差(水平方向)优于0.1 mm,对高精度GPS 观测结果具有较好的修正意义。

表2 天线相位中心偏移计算结果 单位:mm
4 结语
本文根据高精度测地型GPS 天线相位中心检测的需要,研制了一种时间同步自动旋转装置,利用机械结构设计提高被测天线的回转精度和指向精度,使用GPS 授时芯片实现了被测天线按GPS 时序高频率自动旋转,从方法上提高了检测结果的准确性。
利用该装置进行天线相位中心检测结果准确、重复性好、自动化程度高,已在实际外业检测中取得良好的应用效果。 被测天线在高频率自动旋转下其相位中心的检测精度可达亚毫米级,对高精度GPS观测结果具有较好的修正意义。
