直驱电梯安全防坠装置的研究与仿真分析
2021-03-16谈伟荣
谈伟荣,沈 浩,张 旺,孙 盟
(兰州理工大学机电工程学院,甘肃 兰州 730050)
直线电机驱动电梯(直驱电梯)经过30多年的研究,在垂直提升领域取得了突破性的成果。与传统钢丝绳曳引电梯不同的是,直驱无绳电梯摆脱了钢丝绳的束缚,具有单个井道同时运行多部轿厢、提升高度不受限制等优点[1]。由于直驱电梯对安全性能有更高的要求,安全制动装置成为亟待解决的难题[2],如何解决系统运行中制动、紧急停车、安全等关键性技术问题,直接关系到直驱电梯的推广和应用。
目前,国内外已经成功研制出许多不同结构的安全钳防坠装置[3-5],但都应用在曳引式提升电梯,依靠限速器和钢丝绳提拉装置实现安全钳的抱闸。因为直驱电梯结构设计的特殊性,所以这些提拉装置已经不适合用于它的制动。当前,国内学者在直驱电梯安全制动方面的研究成果很少。汪旭东等[6]设计了一种安全防坠装置,通过安装在电机定子和动子上的齿轮齿条,带动超越离合器,触发钢丝绳提拉安全钳制动,其缺点是摩擦损耗大、制动反应慢、制动可靠性不高;王建生等[7]设计的摩擦式防坠器,依靠弹簧拉力使制动闸块作用于罐道,但是抓捕误动作较多、动作不够灵敏。因此,设计一款安全可靠的安全防坠装置十分必要。
1 安全防坠装置的设计
1.1 安全防坠装置结构设计
为了提高直驱电梯提升系统的安全性能,除了采用电气制动方式[8-9]减小设备下坠速度外,还得依靠机械防坠装置才能保证电梯的平稳制停。本文设计的机械式安全钳防坠装置兼有限速和防坠双重功能,结构和传统提升机的安全钳防坠器基本相同,唯一区别是它以储能弹簧为动力源,不需要限速器和钢丝绳提拉装置,其结构简图如图1所示。电梯正常运行时依靠电磁装置产生的作用力压缩储能弹簧4,制动楔块6处于非动状态。当供电系统失电或速度超过预设速度的115%时,电磁装置失电,制动楔块在弹簧力作用下与载客平台相向运动,通过安全钳与导轨抱闸,迫使载客平台减速直至停止,从而保证乘客的人身安全。
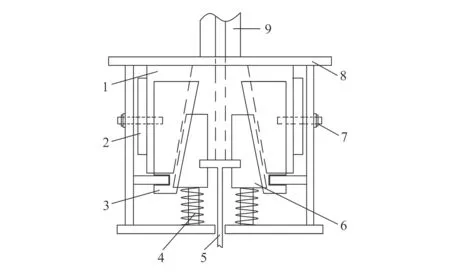
1—固定楔块;2—U型板簧;3—导板;4—储能弹簧;5—提拉杆;6—制动楔块;7—调节螺钉;8—钳体;9—T型导轨
1.2 制动可靠性分析
安全防坠装置在制动过程中需要提供足够大的制动力,保证电梯下坠一定距离后及时制停,以免造成人员及货物的损失。安全钳制动过程复杂,动作时间短,具体受力情况很难确定,无法建立整个运动过程的数学模型,本文重点对安全钳制动楔块的受力进行分析,受力情况如图2所示。
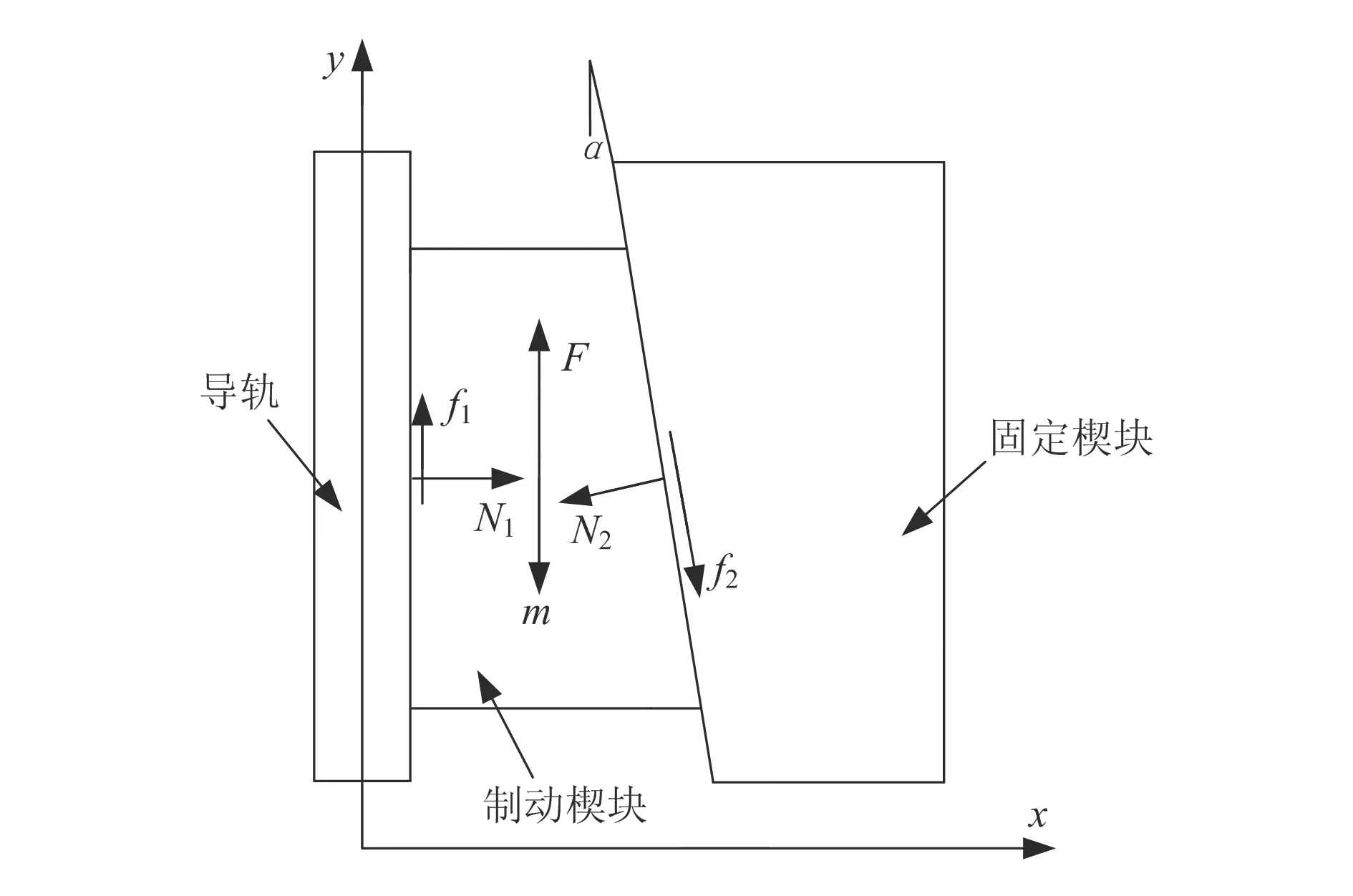
图2 安全钳制动楔块受力分析
电梯制动停止后安全钳的平衡方程为:
(1)
式中:∑Fx为平衡方程沿x轴的力系总和;∑Fy为平衡方程沿y轴的力系总和;g为重力加速度;N1为导轨对制动楔块的正压力,N;N2为固定楔块对制动楔块的压力,N;f1为制动楔块与导轨间的摩擦力,N;f2为两楔块间的摩擦力,N;F为弹簧推力,N;m为制动楔块质量,kg;α为制动楔块倾角,(°)。
制动机构的可靠性决定着安全防坠装置的可靠性,因此把制动楔块设计成一个自锁机构,它的可靠性就能得到很好的保证[10]。当电梯制停后,根据图2推导出制动楔块的自锁条件。
由∑Fx=0得:
(2)
式中:μ1为制动楔块与导轨间的滑动摩擦系数。
由式(2)推导得:
f1=μ1(N2cosα-f2sinα)
(3)
由∑Fy=0得:
(4)
式中:μ2为制动楔块与固定楔块之间的滚动摩擦系数。由式(4)推导得:
f1=μ2N2cosα+N2sinα
(5)
电梯制停后由于楔块自重和弹簧作用力很小,忽略不计,结合式(3)和式(5),整理得到:
(μ1f2+N2)sinα=μ1N2cosα
(6)
即:
(7)
因此,当楔块夹角α满足式(7)时即能实现自锁,从而保证电梯的可靠制动。
1.3 储能弹簧的设计计算
储能弹簧作为驱动机构的主要动力源,在设计中要考虑弹簧提供的最大作用力应满足《电梯工程施工技术标准》和《电梯制造与安装安全规范》[11]中的相关规定:
1)安全制动装置应能夹紧导轨,使装有额定载重的轿厢制停并保持静止状态。
2)在装有额定载重的轿厢自由下落情况下,渐进式安全钳制动的平均加速度为0.2g~1.0g。
3)作用于制动楔块的最小力要满足150~300 N。
2 安全防坠装置动力学仿真
安全钳防坠装置的制动速度、制动时间、制动距离和加速度这几个参数是衡量制动性能好坏的主要指标,本文利用ADAMS软件对安全钳制动过程进行动力学仿真试验,探究其制动性能。
2.1 仿真模型的简化
将SolidWorks软件中建立的模型导入到 ADAMS 中,由于电梯结构组成和受力情况复杂,因此在进行动力学仿真之前,需要对电梯和安全钳防坠装置的模型进行必要的简化,对非关键部件的外部形状不予考虑。在制动过程中防坠装置只和导轨有摩擦接触,而安全钳和轿厢固定在一起的,其重力可以通过设置力的大小来实现,简化模型如图3所示,安全钳只保留了钳体、制动楔块和储能弹簧。其中储能弹簧的添加在ADAMS中完成,设置弹簧弹性系数K=80 N/mm,阻尼系数C=0.5。
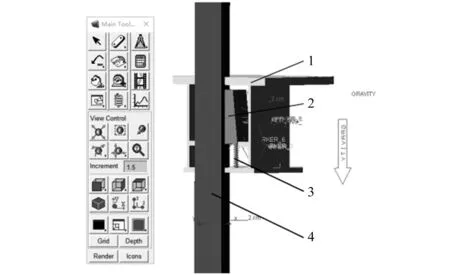
1—钳体;2—制动楔块;3—储能弹簧;4—T型导轨
2.2 仿真参数的设置
仿真模型基于以下几个假设条件:1)各零件的装配间隙以及制造误差均忽略不计;2)各零件均视为理想刚体;3)制动过程不存在打滑现象。通过添加约束来限制构件之间的相对运动,将导轨与制动楔块设置为滑移副接触,安全钳与轿厢体设置为固定副,导轨相对大地为固定构件。制动楔块与导轨接触力在制动过程中发挥着主要作用,材料均设置为钢。碰撞参数设置见表1。
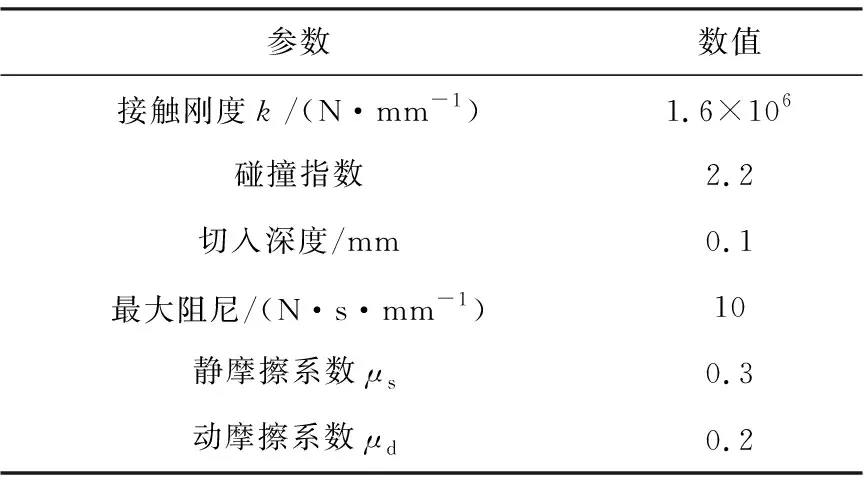
表1 导轨与安全钳的碰撞参数
2.3 仿真结果分析
为了验证防坠装置的制动性能,以轿厢体质量为1 000 kg、初速度为2 m/s,仿真时间为0.6 s,步长为100进行仿真,速度变化曲线如图4所示。当轿厢体以2 m/s做自由落体时,安全钳启动,安全钳制动楔块和导轨接触前,载客平台速度会有一个小幅增大,之后轿厢体速度不断减小,随着安全钳与导轨抱闸阻力的不断增大,经过约0.36 s后速度降为0,电梯被制停。
加速度的变化曲线如图5所示,从图中可以看出:

图4 轿厢速度变化曲线
1)安全钳制动过程中,加速度先迅速增大,之后以小振幅值波动,制停瞬间由于摩擦力的突变会有一个较大的波动,最后降为0。
2)在制动楔块刚接触到导轨瞬间,安全钳对导轨有较大的冲击力,会产生很大的冲击加速度。
3)在制动过程中加速度基本保持在6 000 mm/s2,即0.6g,满足安全钳制动时的平均加速度要求。

图5 安全钳制动加速度曲线
位移的变化曲线如图6所示,在整个制动过程中,位移曲线整体比较平滑,滑移了约380 mm后停止,说明安全钳的制动滑移距离为380 mm。

图6 轿厢位移曲线
3 结束语
电梯安全制动过程为危险运行阶段,特别是加速度较大的制动过程,最易发生恶性事故。本文以直驱电梯安全防坠装置为研究对象,设计了一种新型安全钳防坠装置,通过建立三维建模并在ADAMS中进行动力学仿真试验,探究了制动过程中速度、加速度和位移的变化情况。仿真结果表明,设计的安全钳防坠装置制动指标参数均满足电梯安全规章的规定,为直驱电梯的防坠设计提供了借鉴。
