基于HOG特征与SVM的视频车辆检测系统设计
2021-03-15谭光兴孙才茗王俊辉
谭光兴 孙才茗 王俊辉


摘 要:为增强车辆预警,解决行车状态下前方车辆实时检测问题,构建了一种基于方向梯度直方图(HOG)特征与支持向量机(SVM)的视频车辆检测系统.首先对提取HOG特征的步骤及SVM算法基本原理进行研究,用拍摄的实际道路视频对系统进行测试;分别提取出正、负样本集的HOG特征,用于SVM分类器模板的训练;再计算待测视频图像HOG特征,送入分类器中与训練好的模板比对;最后用矩形框标注出检测到的车辆目标.测试结果表明:该算法能够适应复杂的行驶环境,实现高效、精准的视频车检.
关键词:车辆预警;方向梯度直方图;支持向量机;车辆分类器;车辆检测
中图分类号:TP391.41 DOI:10.16375/j.cnki.cn45-1395/t.2021.01.003
0 引言
城市的发展日新月异,道路交通早已是民生的重要组成部分,智能化交通系统亟待实现[1].视频车辆检测系统是智能交通系统的关键环节之一[2],应用于交通领域的视频车辆检测主要分为基于运动信息与基于特征信息两种方式[3].其中,基于运动信息的车辆检测方法有光流法[4]、帧间差分法[5]、背景差分法[6]和高斯混合模型法[7]等.这些方法难以避免的缺陷是当摄像机身处抖动状况、道路环境的光照发生变化时会使检测结果产生误差,并且较难排除检测目标所处环境的背景.基于特征信息的车辆检测的方法是现阶段视频目标检测领域研究的热点和重点,各种车辆特征中,方向梯度直方图(HOG)特征和Haar-like特征在车检中效果稳定,因此使用频率较高[8-9].
基于Haar-like特征与Adaboost算法相结合来实现视频车辆检测[10],在简单场景下检测效果较好,场景中的车辆几乎都能较准确地检测出来;但在光照和背景较复杂的行驶环境下,检测效果较差,误检率较高.而与其他的目标检测方法相比,HOG特征对于图像光强变化具备良好的抗干扰能力,对于目标的描述具有较强的鲁棒性[11],再加上向量机(SVM)算法表现出系统结构简单、全局最优、训练时间短等优势[12].因此,本文设计一种基于HOG特征与SVM的车辆检测系统,对待测样本中本车前方车辆进行识别.
1 HOG特征的提取
HOG特征的主旨思想即利用梯度或边缘方向分布将待测图像局部目标的轮廓特征完整地表现出来.由于HOG是从图像局部区域的cell单元上提取各像素点梯度,因此,没有严格的清晰度限制,降低了对拍摄视频工具的要求,节约了成本[13].
HOG特征提取算法实现过程主要分为以下4步:
1)颜色空间的标准化
首先将整个图像进行Gamma标准化处理,gamma表示压缩系数,通常取值为0.5.这种压缩处理能够有效地降低算法对于光照的敏感性,提升算法对光照变化的稳定性[14].Gamma压缩公式为:
2)计算图像梯度信息
图像横纵坐标方向的梯度值分别求解出后,各个像素点的梯度方向值也相继得出;求导操作不但可以得知形状和部分纹理信息,还能再次削弱光照带来的干扰.梯度在水平方向[[-1, 0, 1]]和垂直方向[[-1, 0, 1]T]算子下的定义为:
3)细胞(cell)的梯度方向直方图
将图像划分为多个大小一致的细胞单元cell,cell又由更小的单位像素组成. 收集一个cell内像素的梯度信息采用的是9个bin的直方图,如图1所示,每个方向块为20°.在直方图中cell内所有像素点乘以梯度幅值进行梯度方向的投影;再将它们的投影进行求和,即得到一个cell的梯度方向直方图.
4)块(block)内归一化梯度直方图
块单元block是由每几个cell组成的区块,不同block之间可以存在重叠,图像局部区域的HOG特征由它所包含的所有区块构成.进行块内归一化是必要的,主要为避免局部的曝光度等因素导致梯度值变化差距过大.归一化过程如式(6)所示,[v]表示某block未归一化的特征向量;[f]表示归一化结果:
其中:[μ]为引入参数,数值非常小,为了避免分母为0的情况.
2 SVM算法的分类原理
2.1 超平面选择
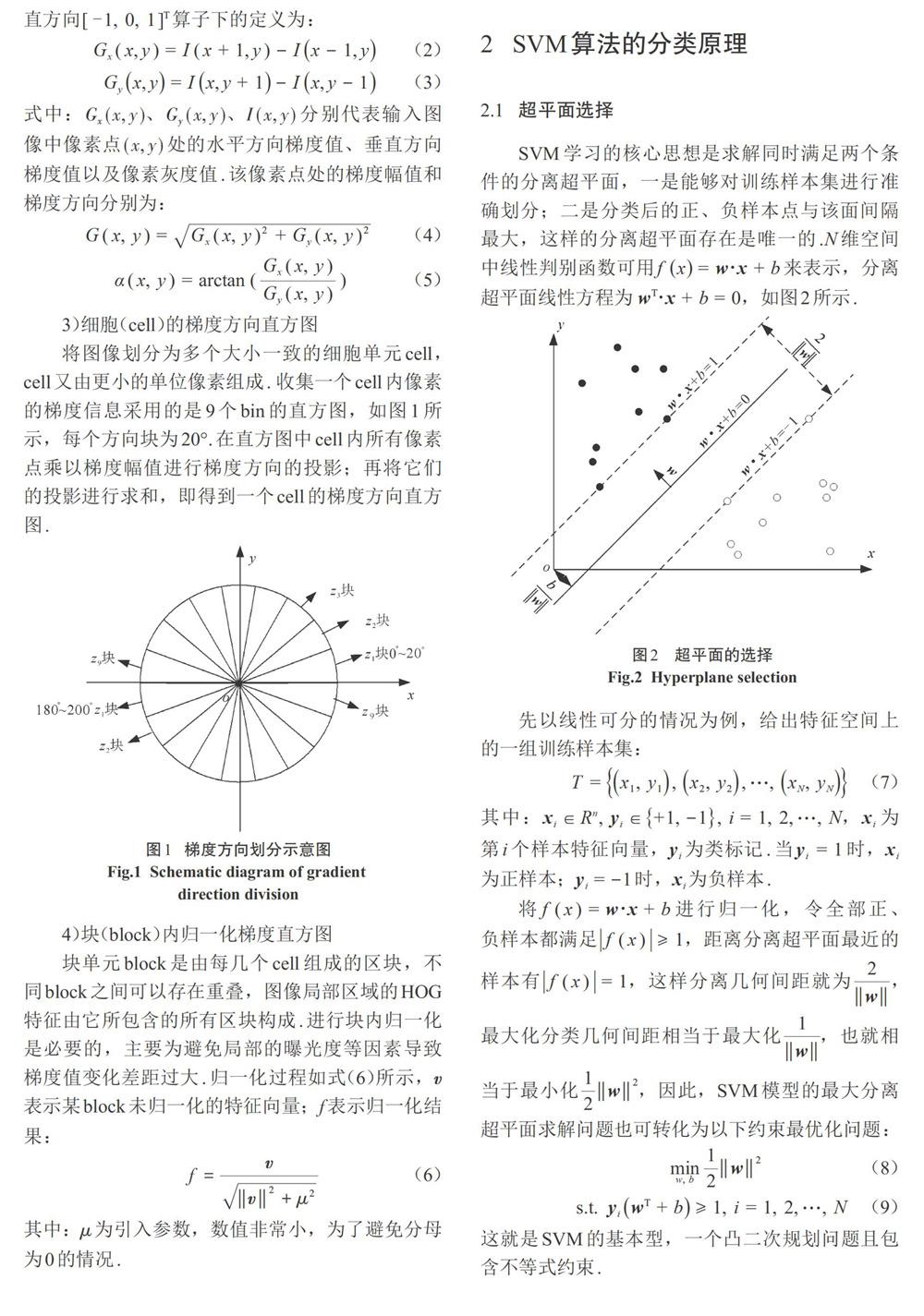
SVM学习的核心思想是求解同时满足两个条件的分离超平面,一是能够对训练样本集进行准确划分;二是分类后的正、负样本点与该面间隔最大,这样的分离超平面存在是唯一的.N维空间中线性判别函数可用[fx=w?x+b]来表示,分离超平面线性方程为 [wT?x+b=0],如图2所示.
先以线性可分的情况为例,给出特征空间上的一组训练样本集:
将[f(x)=w?x+b]进行归一化,令全部正、负样本都满足[f(x)≥1],距离分离超平面最近的样本有[f(x)=1],这样分离几何间距就为[2w],最大化分类几何间距相当于最大化[1w],也就相当于最小化[12w2],因此,SVM模型的最大分离超平面求解问题也可转化为以下约束最优化问题:
2.2 超平面求解
凸二次规划问题可利用拉格朗日对偶性来解决.原始目标函数含有不等式约束,首先设法将其转变为无约束,新组出拉格朗日目标函数(见 式(10)),[αi]为引入拉格朗日乘子,且[αi≥0].[Lw, b, α=12w2-i=1NαiyiwTxi+b-1]
等价于约束问题:
3 测试结果讨论
3.1 实验环境
1)硬件环境:Intel Core i5-9400F CPU @2.9GHz 4.1GHz,8.0 GB运行内存,NVIDIA GeForce GT 730入门级独立显卡.
2)软件环境:操作系统为64位Win10系统,在OpenCV开发环境下利用Python3.6实现.
3.2 实验数据
实验中用于SVM分类器模板训练的样本均为手工制作,利用拍摄的实际道路视频采集出大量车辆样本与非车辆样本.其中,车辆样本包含不同车型,如小型轿车、面包车、厢车与大型货车等,颜色包括白色、红色、蓝色、黑色等;非车辆样本来源于行驶环境中的植被、交通标志物、栏杆、车道线及楼房等.正样本数量为1 223张,负样本数量为1 700张.部分正、负样本如图3所示.
3.3 车辆检测流程
对HOG特征与SVM结合的检测算法进行有效性验证,测试过程可分为两个模块:1)训练模块,主要包括分别提取正、负样本的HOG特征,该过程中细胞单元取8×8个像素组成,块单元取2×2个细胞组成,梯度方向角度划分为9,一个块的特征数为2×2×9;将得到的HOG特征用于分类器模板的训练.2)检测模块,先计算出待测样本的HOG特征,将其送入的SVM分类器与检测所用模板进行对比,当检测出目标车辆时便用矩形框进行标注.车检流程如图4所示.
3.4 结果与分析
对算法的检测性能进行验证,图5(a)—图5(d)为随机抽取的视频检测结果中的不同帧图像.
从检测结果中可以看出,车辆在城市道路上行驶时,周围环境复杂,同时还出现前方多辆车辆粘连等情况,增加了前方车辆识别负担与难度.但基于HOG特征与SVM分类器模板结合进行分类识别,排除各种非车辆物体的干扰,该算法仍有效检测出前方车辆目标.
1)车辆检测速率
对本文算法与其他基于图像处理的车辆检测方法进行车检速率的统计,结果如表1所示.平均每帧耗时的计算方法为:先去掉选取的200帧中每帧耗时的最高值和最低值,再求剩余198帧视频图像的每帧耗时均值.由表1可得出,Haar与Adaboost结合的方式最慢,但3种方法的每帧耗时均值差别不大,都基本满足实时检测的要求.
2)车辆检测准确率
检测率为正确检测样本数量与总测试样本数量之比,误检率为错误检测样本数量与总测试样本数量之比.将本文算法与其他基于图像处理的车辆检测方法的准确率进行比较,结果如表2所示.
由表2可看出:本文算法较之其他传统的车辆检测方法提高了检测率,降低了误检率;再结合表1的速率统计结果可以直观地得出:本文的视频车辆检测方法在满足基本的实时性情况下提高了车辆检测的准确率,具备较为理想的目标检测效果.同时与图像识别领域中的深度学习算法相比,对硬件的计算能力要求不高,考虑成本因素,更容易实现大规模应用.
4 结语
本文提出的一种基于HOG特征与SVM算法相结合的视频车辆检测方法,能够消除行驶环境中树木、交通标识、建筑物以及一些路面的影响,能有效地对视频图像中的目标车辆进行检测和标注;由于加強了前方车辆预警,在一定程度上使驾驶辅助系统的安全性能得到了保障.此算法在视频车辆检测率方面有一定的创新,与传统的车辆检测方法相比,在不牺牲检测速率的情况下提升了车辆检测的准确率.在未来的研究中将对算法的实时性进行更进一步的优化,以便推广到实际的视频车检系统中.
参考文献
[1] 王纲,李月荣,贾冬艳.大数据在城市智能交通中的应用研究[J].办公自动化,2017,22(20):24-25.
[2] 张凯,李华文.一种基于SVM和HOG特征的视频车辆识别算法[J].电子世界,2019(7):74-75.
[3] NAVID N-V,BORGES P V K,ROBERTS J M,et al. On the use of optical flow for scene change detection and description[J]. Journal of Intelligent and Robotic Systems,2014,74(3-4):817-846.
[4] 耿庆田. 基于图像识别理论的智能交通系统关键技术研究[D].长春:吉林大学,2016.
[5] 张延丽,李春贵.视频车辆检测中改进的阈值分割算法研究[J].广西科技大学学报,2017,28(2):61-66,78.
[6] MAO T Q,REN L R,YUAN F Q,et al. Defect recognition method based on HOG and SVM for drone inspection images of power transmission line[C]//2019 International Conference on High Performance Big Data and Intelligent Systems (HPBD&IS),Shenzhen,China,2019.DOI:10.1109/HPBDIS.2019.8735466.
[7] 薛圣利,蔡启仲,杨海林,等.基于OpenCV的火车票识别算法[J].广西科技大学学报,2016,27(2):46-51.
[8] 崔春辉.基于单目视觉的车辆检测算法研究[D].沈阳:东北大学,2017.
[9] MO W Y,GAO Y,ZHAO Q Y. Confusable vehicle feature extraction and recognition based on cascaded SVM[C]//2017 3rd IEEE International Conference on Computer and Communications (ICCC),Chengdu,2017.DOI:10.1109/CompComm.2017.8322918.
[10] 朱志明,乔洁.基于Haar-like特征与Adaboost算法的前方车辆辨识技术研究[J].电子测量技术,2017,40(5):180-184.
[11] HAN S J,HAN Y J,HAHN H. Vehicle detection method using haar-like feature on real time system[J].Chemistry, 2009,15(37):9521-9529.
[12] 周越.基于视觉的车道线识别研究[D].锦州:辽宁工业大学,2019.
[13] 郭明玮,赵宇宙,项俊平,等.基于支持向量机的目标检测算法综述[J].控制与决策,2014,29(2):193-200.
[14] 王娜. 基于SVM算法的前方车辆视频检测[D].济南:山东师范大学,2016.
