二阶非线性多智能体系统的固定时间领导-跟随集群
2021-03-15侯惠清欧阳自根
侯惠清,欧阳自根
(南华大学 数理学院,湖南 衡阳 421001)
0 引 言
自然界中,团队合作的群体行为随处可见,如鸟群迁徙、蚁群搬家、蜂群采蜜等。受动物群体的一致性行为的启发,学者们把群体中的每一个个体模拟成一个智能体,从而对多智能体系统的动力学行为展开研究。这里所谓的多智能体系统是指由多个协同合作、信息交互的智能体组成的系统。近年来,多智能体系统快速发展,应用广泛,如无人机编队飞行表演[1]、分布式传感器网络[2]、多机器人团队协作[3]等,极大地提升了人们的生活质量。集群作为多智能体系统的一个基础问题也逐渐地成为多智能体系统研究的一个热点方向。
在研究集群时,收敛时间是评价所设计的系统控制协议的一个重要标准。目前大多数研究成果只考虑了渐近性集群[4-6],即当且仅当时间趋向于无穷时,集群才会发生。而在实际应用中,若多智能体系统能在有限时间内或固定时间内达成共识行为更有现实意义。因此多智能体系统的有限时间集群研究引起了广大学者的热切关注。例如,X.L.Li等人[7]提出了一种基于局部时延信息交换的多智能体系统有限时间集群方案。H.P.Zhang等人[8]研究了多智能体系统的有限时间分布式事件触发共识控制。L.Zhao等人[9]研究了具有非线性动力学的二阶随机多智能体系统的有限时间集群问题。Y.C.Cao等人[10]分析了具有多智能体网络的非线性连续共识算法的有限时间收敛性。这些研究结果表明系统的收敛时间依赖于系统初始值。然而,在实际应用中系统初始值也很难获取。由此延伸出固定时间的集群问题,它的收敛时间由系统参数与网络的连通性所决定,与系统初始值无关,极大地扩展了多智能体系统协同控制的现实应用范围。基于此,大量的学者对固定时间集群问题进行了研究,如W.Xu等人[3]研究了非线性多智能体系统的领导-跟随集群问题,得到了系统形成领导-跟随集群的一些基本标准和简化条件。Z.H.Xu等人[11]研究了二阶非线性多智能体系统的固定时间领导-跟随集群。F.Cucker等人[12]研究了避碰集群的一般结果。H.L.Liu等人[13]研究二阶多智能体系统的集群与避免碰撞问题。另外,孙小童等人[14]研究了有向拓扑网络中具有非匹配扰动的二阶多智能体系统固定时间一致跟踪问题。B.Ning等人在文献[15]中得到二阶非线性多智能体系统的有限时间与固定时间的领导-跟随集群理论,但并没考虑系统形成固定时间领导-跟随集群运动时的群体大小及免碰撞条件。
受文献[15]启发,本文设计了一个新控制协议ui(t),并基于非光滑技术、图论和固定时间稳定性理论,得到稳定时间上界估计式,同时给出了智能体之间避免碰撞的充分条件,并刻画了系统达到稳定状态时的群体大小,本文末使用MATLAB软件对所设计的新控制协议和现有系统进行了理论验证,结果显示,在定理的条件得到满足时,系统在固定时间内形成免碰撞集群。
1 预备知识
1.1 符号说明
符号R,R+,Rd,Rn×n分别表示一维实空间、一维正实空间、d维实向量空间和n×n维实矩阵空间。记符号1d是所有元素都为1的d×1列向量。Id是d维单位矩阵。

其中
对∀xi∈Rd,p-范数定义为
1.2 图论
假设智能体系统由N个智能体组成。它们之间的信息交互可以用加权无向图ζ=(v,ε)来表示,其中v={v1,v2,…,vN},表示图ζ的节点集,是图ζ的边集。当且仅当第i个节点能直接接收到第j个节点信息时,否则(vi,vj)∉ε。记A=(aij)N×N为关联矩阵,A∈Rn×n,其中aij表示节点i到节点j之间边的权值。不失一般性,当(vi,vj)∈ε时,aij≥0。当(vi,vj)∉ε时,aij<0。本文考虑无向图,即aij=aji,并假设不存在自循环,即aii=0。图ζ的Laplacian矩阵L=(lij)N×N定义为
若领导者对第i个智能体有作用,di=1,否则di=0。记H=L+diag(d1,d2,…,dN)。
1.3 非光滑技术基础
定义1[16]:考虑非线性动力学系统
(1)

定义2[2]:局部Lipschitz函数f:Rn+1→Rn,f关于F在x处的集值李导数定义为

ξTw=z,∀ξ∈∂f},
其中∂f为f的广义的Clarke梯度。
2 问题表述
考虑一个由一个领导者(设为个体0)和N个跟随者(设为个体1,2,…,N)组成的多智能体系统,其中领导者的动力学行为用下面方程来刻画
(2)

用下面方程描述系统中第i个智能体的行为
(3)
它们的初始状态为
(xi,vi)(0)∶=(xi0,vi0),i=1,2,…,N。
(4)


(5)
其中α>0,β>0,γ>0,q>p>0。
引理1[17]:∀x∈Rn,p,r是标量常数且p>r>0,有不等式
引理2[17]:∃p>1,a1,a2,…,aN≥0,有不等式
引理3[18]:若标量系统
(6)
其中n,m,p,q是正奇整数,并且α,β,γ>0,m>n,q>p。则系统(6)实现了固定时间全局稳定,其稳固定时间间的上界可估计为
3 主要结果
为了使得系统在固定时间内形成集群,本文对函数f(·)做出与文献[11]相同的假设,即:

假设2:∃ε1>0,ε2≥0,σ>0,μ>0,有
成立,其中g(t)∈κ[f(xi,vi,t)-f(xj,vj,t)]。
假设3:领导者对跟随者的控制输入是有界的,即∃l>0,有‖u0(t)‖2≤l<∞成立。
假设4:无向图是连通的,且至少存在一个智能体能直接获得领导者的信息。即至少存在一个di>0。
记
其中‖·‖为2-范数,故dXmax(t),dXmin(t),dV(t)一般不是C1光滑的。
定义3:若系统(2)~系统(4)满足以下条件
则系统(2)~系统(4)实现固定时间领导-跟随免碰撞集群,其中T是稳定时间,不依赖初始状态。
下面给出本文的主要结论。
定理1:结合假设1~4及控制协议(5),当满足以下条件
多智能体系统(2)~系统(4)实现固定时间领导-跟随集群,其固定时间T估计为
(7)
并且群体大小估计为
(8)
进一步,若存在τ>0使得
(9)
成立,那么任意两个体不发生碰撞。
证明:本证明分为3步。首先,令ei(t)=vi(t)-v0(t),i∈{1,2,…,N},则由式(2)~式(4)知
f(x0,v0,t)-u0(t)。
(10)
记
F(x0,v0,t)=[fT(x0(t),v0(t),t),fT(x0(t),v0(t),
t),…,fT(x0(t),v0(t),t)]T,
F(xi,vi,t)=[fT(x1(t),v1(t),t),fT(x2(t),v2(t),
t),…,fT(xN(t),vN(t),t)]T。

(11)
其中⊗为kronecker积符号。于是

F(x0,v0,t)-1d⊗u0。
(12)
进而V(e)的集值李导数为

由假设3可知:
(13)
结合假设2、引理1,并借鉴文献[11]定理5的第一步证明有
(14)
其中λ2(H)>0是矩阵H的最小特征值。
(15)
及
(16)
同理可得
‖(H⊗Id)e‖≥2λ2(H)V(e)
(17)
和
(18)
于是将式(16)~式(18)代入式(15),则有
(19)
因此,根据引理3可知,系统(2)~系统(4)达到了稳定,并且稳固定时间间的上界可估为
由微分方程的比较原理可知,
V(t)≡0,∀t≥T*
(20)
因此当∀t≥T*时,满足vi(t)=v0(t),i∈{1,2,…,N}。系统(2)~系统(4)实现了固定时间领导-跟随集群,其稳固定时间间的上界可以被估计为T*。这就证明了定义3的条件(1)。
第二步:取
(21)
其中∀i,j∈{1,2,…,N}。结合范数的定义、Cauchy-Schwartz不等式、引理2和式(21)有
(22)
对式(22)两边进行积分,得
(23)
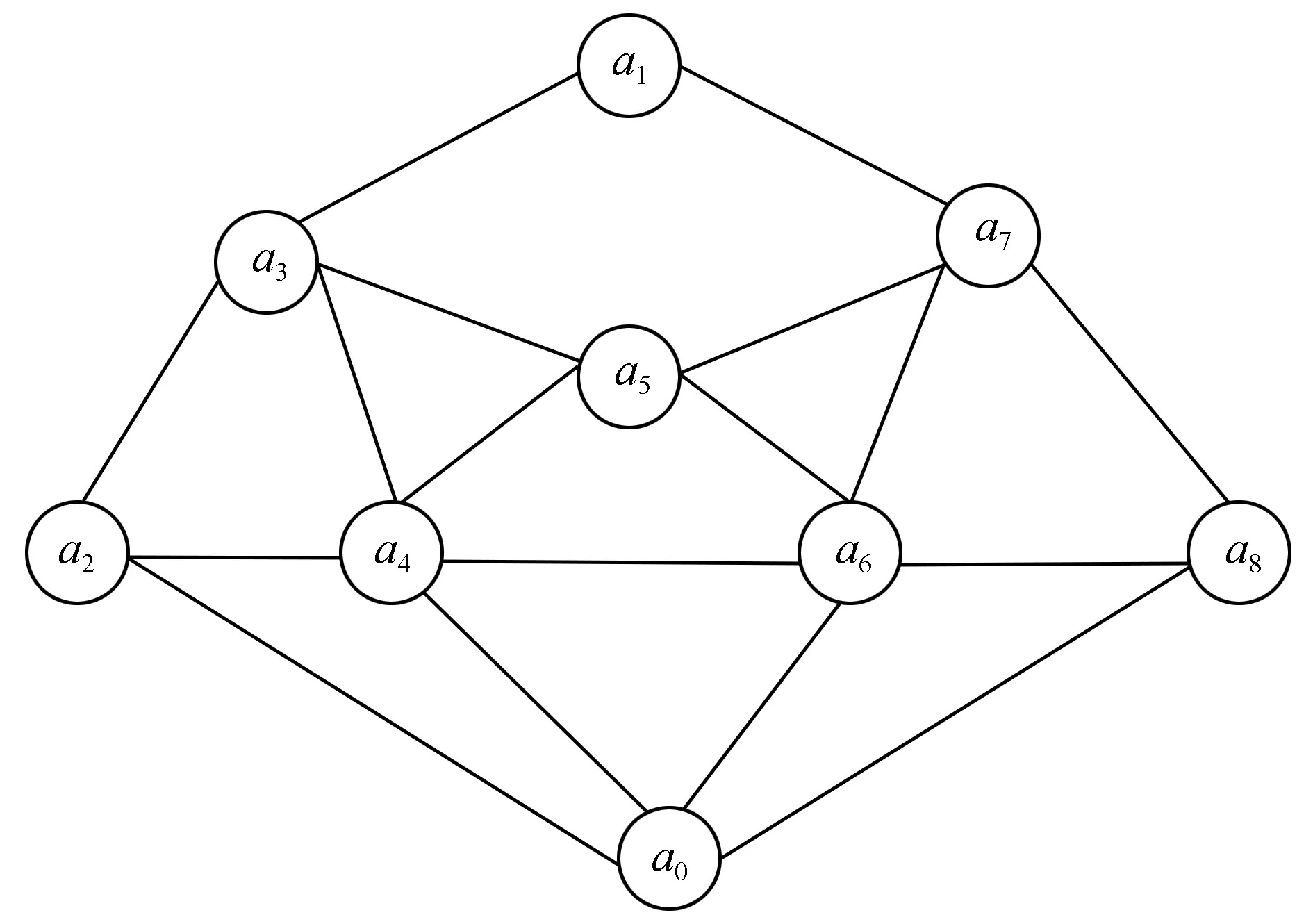
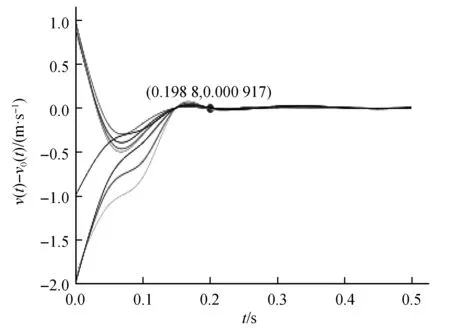
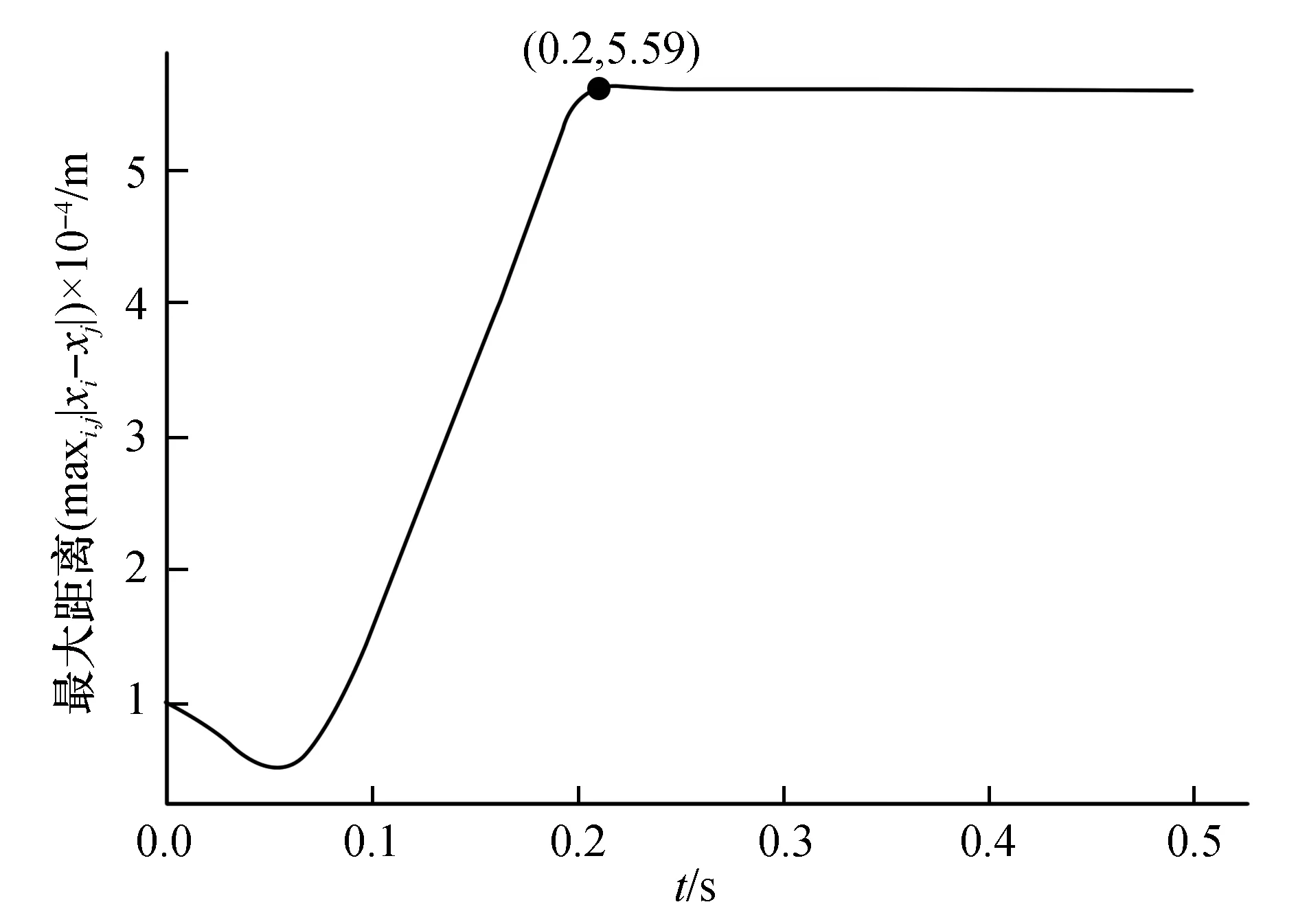
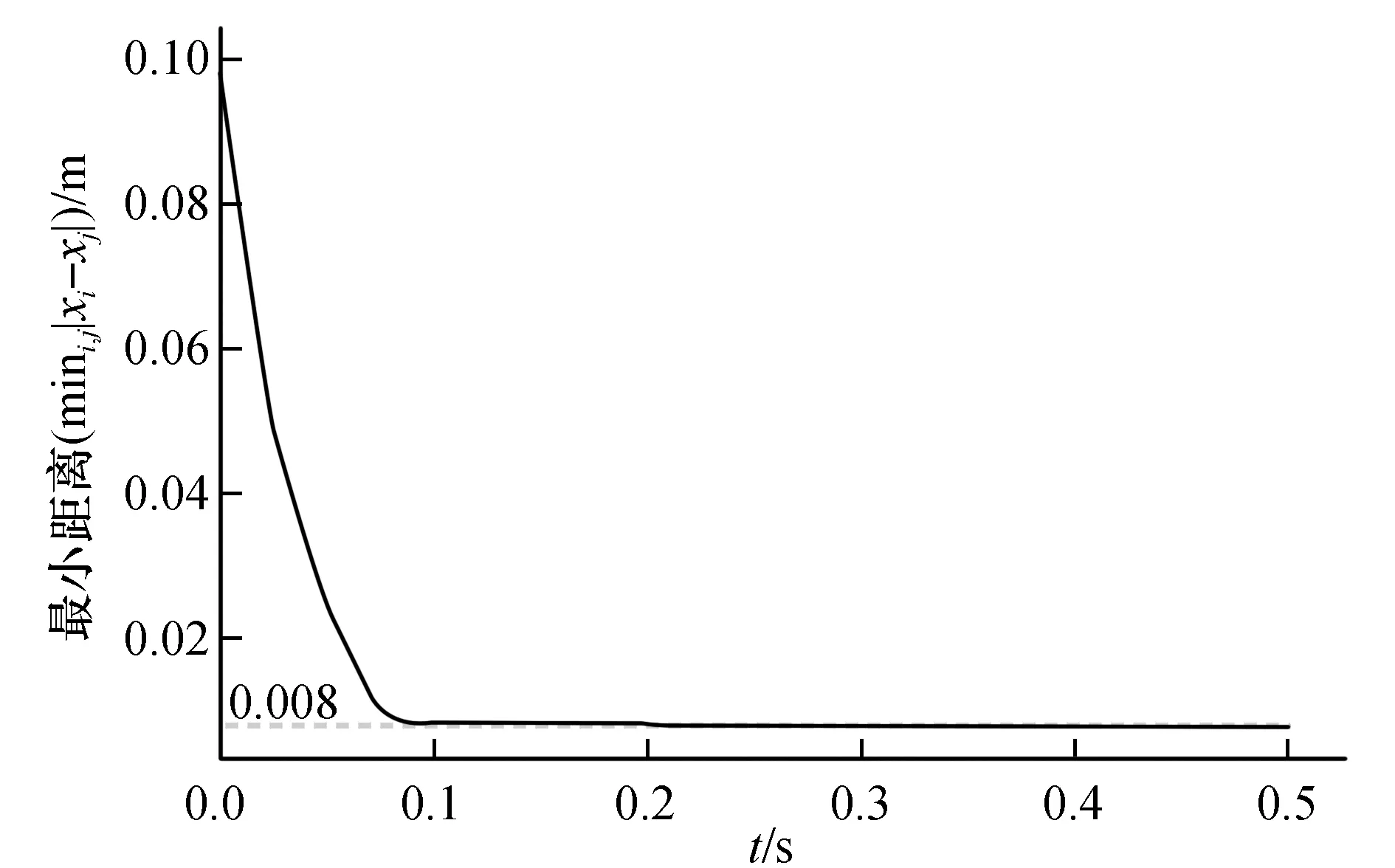
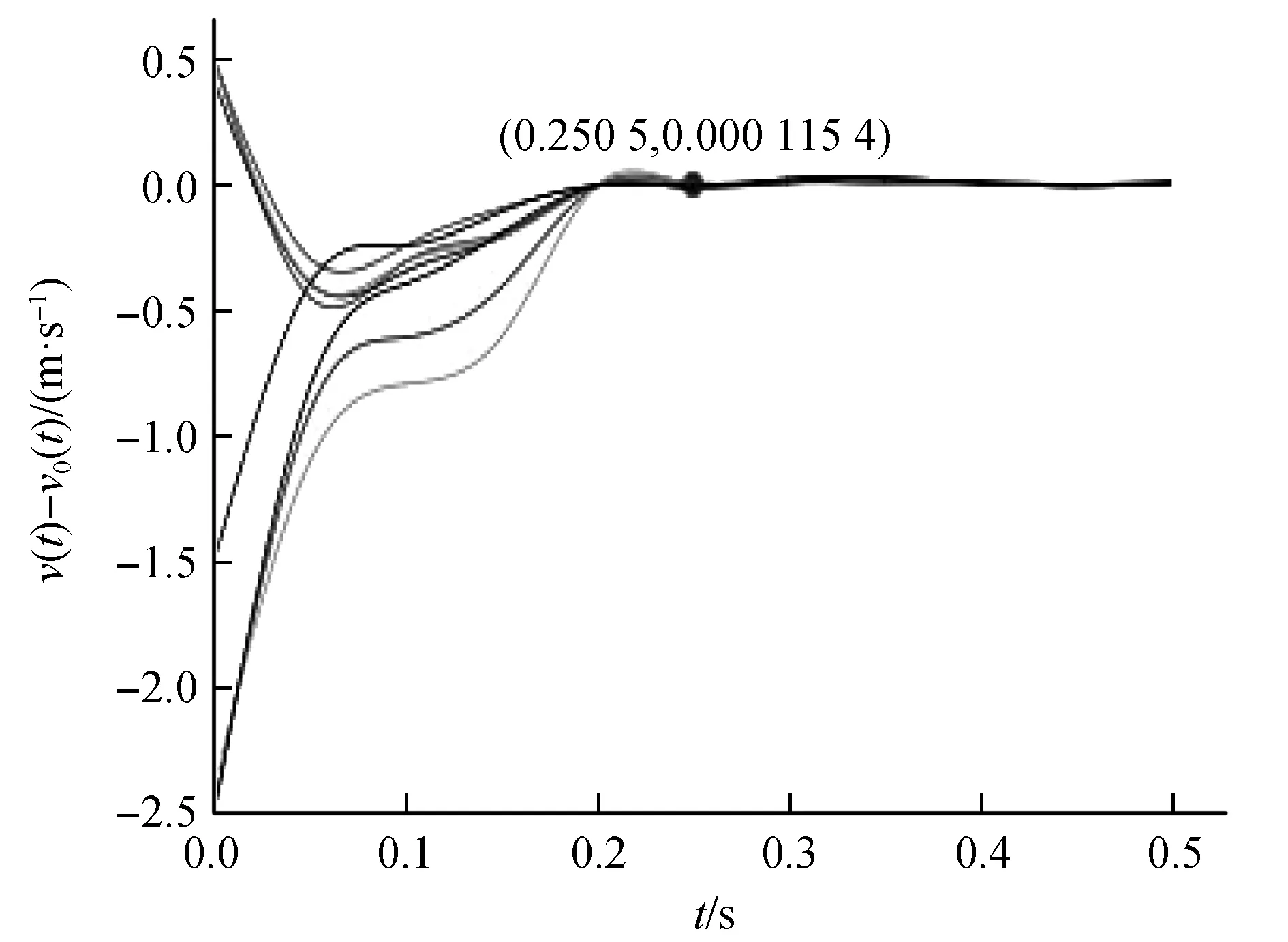
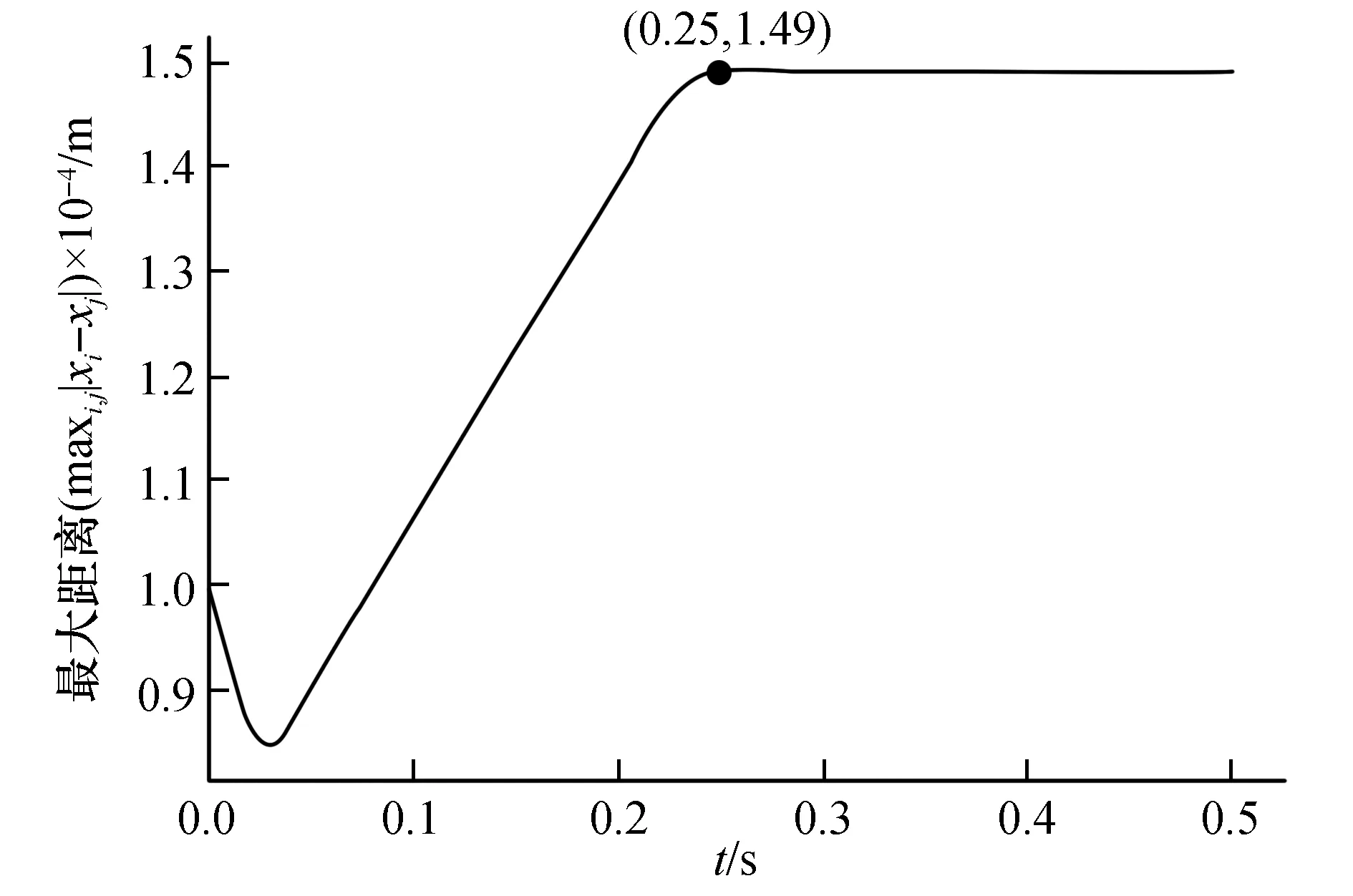
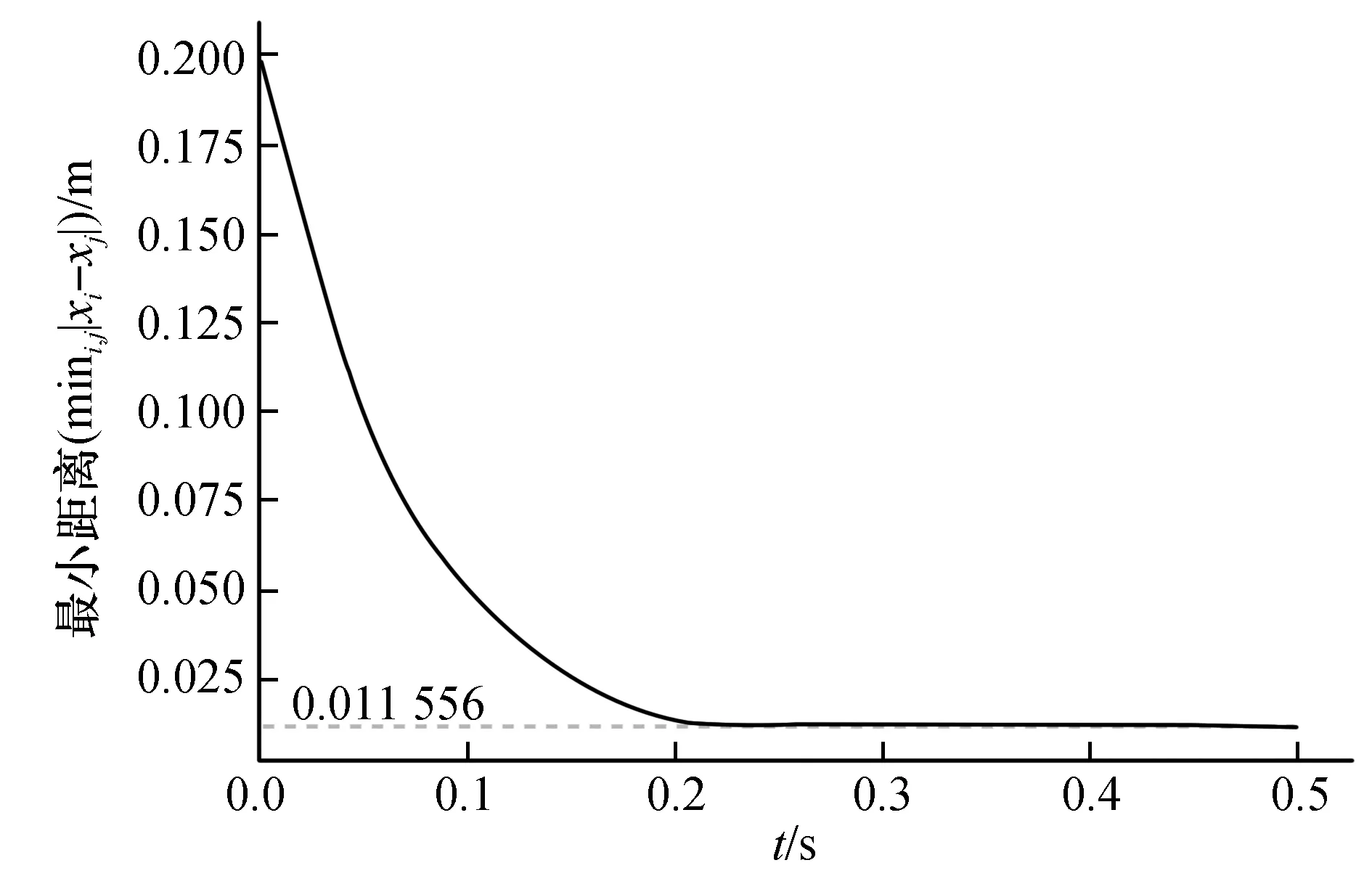
(1)当0 (24) (2)当t≥T*时,有 (25) 所以当∀t>0时有 (26) 结合式(21)、式(26)、引理1和引理2,可以得到 所以群体大小可刻画为 (27) 所以有上式可知,存在C∈R使得 即满足定义3的条件(2)。 第三步。借鉴文献[19]定理4.1的第三步,由式(9)得 这证明了定义3的条件(3)。也即,任意智能体之间不碰撞。证毕。 取d=1,设定该多智能体系统有N=8个跟随者(分别记为a1,a2,a3,a4,a5,a6,a7,a8)和1个领导者(记为a0)。假设领导者对跟随者的控制输入为u0=18sin(13πt),‖u0‖2≤l=18。其拓扑图如图1所示。 图1 领导者和跟随者的交互连续拓朴图Fig.1 Interactive connection topology diagram of leader and follower 由第一部分的图论知识,可得到非负关联矩阵A和正定矩阵H如下: 其中diag(d1,d2,…,d8)=(0,1,0,1,0,1,0,1)T。 为了更好验证前面理论分析的有效性,给出以下两个算例: 算例1:给定f(xi(t),vi(t),t)=0.03vi-2sign(vi),i∈{0,1,…,8},ε1=0.06,ε2=0,σ=3,μ=1,q=7,p=5,α=1,β=5,γ=2。领导者的初始状态设为x0(0)=1,v0(0)=0.5,跟随者的初始状态设为x(0)=[0,0.05,0.10,0.15,0.20,0.25,0.30,0.35]T,v(0)=[1,-3,-2,1,1,1,-1,1]T。容易验证满足假设条件1~4。且通过式(7)算得T*=5.802。结合MATLAB得到模拟图,如图2~图4所示。 从图2可知当t=0.15后智能体相对速度收敛于零。从图3知当t=0.20后所有智能体相对最大距离约为5.59且保持不变。从图4知其相对最小距离逐渐下降,当t=0.20后,约为0.008且保持不变,这表示多智能体系统在t=0.20时形成不碰撞的集群并保持不变。这就证明了定理1的有效性。 算例2:给定f(xi,vi,t)=0.03sin(vi)-2sign(vi),i∈{0,1,…,8},ε1=0.06,ε2=0,σ=3,μ=1,q=7,p=5,α=8,β=15,γ=9。领导者的初始状态设为x0(0)=1,v0(0)=0.5,跟随者的初始状态设为x(0)=[0,0.10,0.20,0.30,0.40,0.50,0.60,0.70]T,v(0)=[1,-3,-2,1,1,1,-1,1]T。容易验证满足假设条件1~4。且通过(7)算得T*=1.608。结合MATLAB,得到模拟图,如图5~图7所示。 类似于上个算列分析,图5表明多智能体系统在t=0.25时,相对速度趋于零。图6表明粒子之间的最大距离在时间t=0.25后保持在1.49,同时图7表明最小距离趋于定值0.012,即说明系统在在T*=1.608之前实现固定时间领导-跟随集群。这进一步验证了本文定理1的理论分析有效性。 图2 智能体的速度Fig.2 The speed of the agent 图3 群体的最大距离Fig.3 Maximum distance of the group 图4 个体间的最小距离Fig.4 Minimum distance between individuals 图5 智能体的速度Fig.5 The speed of the agent 图6 群体的最大距离Fig.6 Maximum distance of the group 图7 个体间的最小距离Fig.7 Minimum distance between individuals 本文利用非光滑技术、图论和Lyapunov稳定性理论,研究了非线性多智能体系统在非lipschitz连续情况下的固定时间领导-跟随集群。通过设计新控制协议,得到了与初始状态无关仅与参数有关的系统稳固定时间上界估计式,以及给出一个避免碰撞的充分条件,并刻画了集群的大小,这极有利扩大了智能体系统的现实应用范畴。4 数值模拟

5 结 论
