基于零膨胀模型的航空器危险接近事件安全影响因素研究*
2021-03-11韩美佳
陈 芳,韩美佳,陈 茜
(中国民航大学 经济与管理学院,天津 300300)
0 引言
2020—2021年,航空器空中碰撞事故是全球航空5大高风险事故类型之一,涉及交通状况、空中交通管制员工作量、飞机设备和机组人员等多方面因素,事故一旦发生,后果极其严重[1]。根据海因里希法则,在进行同一项活动中,无数次意外事件,必然导致重大伤亡事故的发生。航空器危险接近是引发空中碰撞事故必然环节之一[2]。因此,研究航空器危险接近事件安全影响因素及贡献水平意义重大。
针对航空器危险接近事件的研究,学者利用事故树、系统动力学等[3-5]方法,识别陆空通话不规范、飞行指挥员疏忽大意、飞行指挥员疲劳工作、飞行员心理素质、飞行指挥员工作压力大、飞行员驾驶技术欠缺、飞行员违反操作程序和天气原因等安全因素。部分学者探究不同影响因素对航空器危险接近事件风险的贡献水平:王洁宁等[6]通过研究任务差错耦合度与飞行冲突概率变化关系发现,当交接班或团队情境意识出现偏差时,会增加飞行冲突发生风险;王红勇等[7]构建空中交通态势加权网络模型,利用航空器位置、速度、航路点与航段位置等数据,量化空中交通态势风险程度;Valdés[8]在空域特征分析和预测航空器分离损失研究中发现,飞机分离损失数据存在大量零值情况,并首次在空中交通管理中使用零膨胀负二项模型估计飞机之间分离损失数量,建立交通流量等空域设计变量与事故频率相关关系,但没考虑到与零值相关因素对不同事故发生后果概率的影响[9];高比例无碰撞风险事件不代表交通安全改善,与无碰撞风险事件相关的部分变量可能促使航空器接近事件向更高风险方向发展[10];事故数量中过多的零计数属于“零膨胀”现象[11]。零膨胀有序概率模型(Zioprobit)适合解决存在“零膨胀”现象的多值选择问题,能够挖掘其他简约模型忽略的统计影响,识别零观测值潜在来源,并允许事故的影响因素在不同伤害水平间产生不同影响。目前,零膨胀有序模型应用于交通事故伤害严重程度研究中[12],依据该模型,利用大量无伤害单车事故数据,确定事故零伤害状态发生概率的安全影响因素,但研究后果分类侧重交通事故引发的人身伤害,不适用航空器危险接近事件研究。
综上,针对航空器危险接近事件风险等级有序递进关系及“零膨胀”特点,构建航空器危险接近事件零膨胀有序概率模型,确定无碰撞风险事件向更高风险事件演变的安全影响因素。
1 航空器危险接近事件零膨胀有序概率模型
航空器危险接近零膨胀有序概率模型框架由2个相互独立又彼此关联的步骤构成:1)利用二元概率函数,区分航空器危接近事件有无碰撞危险状态。2)当事件处于有碰撞危险状态时,利用有序probit函数,确定不同风险等级结果。在有碰撞危险条件下,允许出现低碰撞风险作为无碰撞危险的“零值”类型之一[13]。
ICAO(国际民航组织)4444PANS—ATM《航行服务程序-空中交通管理》[14]规定,航空器接近事件分4类:有碰撞风险(航空器存在严重碰撞危险接近的等级);安全无保障(航空器接近可能已危及航空器安全的危险等级);无碰撞危险(航空器接近不存在碰撞危险的等级);未定危险(尚无足够情报确定有关危险性,或排除含有此类危险性的,或与排除此类危险性自相矛盾证据的航空器接近的危险等级)。英国航空器接近委员会(UK Airprox Board)设置风险级别时新增1类ICAO没有定义的风险级别:符合报告标准但没有安全影响[15]。考虑航空器接近风险有序递进关系,排除未确定风险严重性和没有安全影响的D、E级别,仅选取有碰撞风险、安全无保障和无碰撞风险3个风险级别进行研究。
航空器危险接近事件零膨胀有序概率模型框架如图1所示。
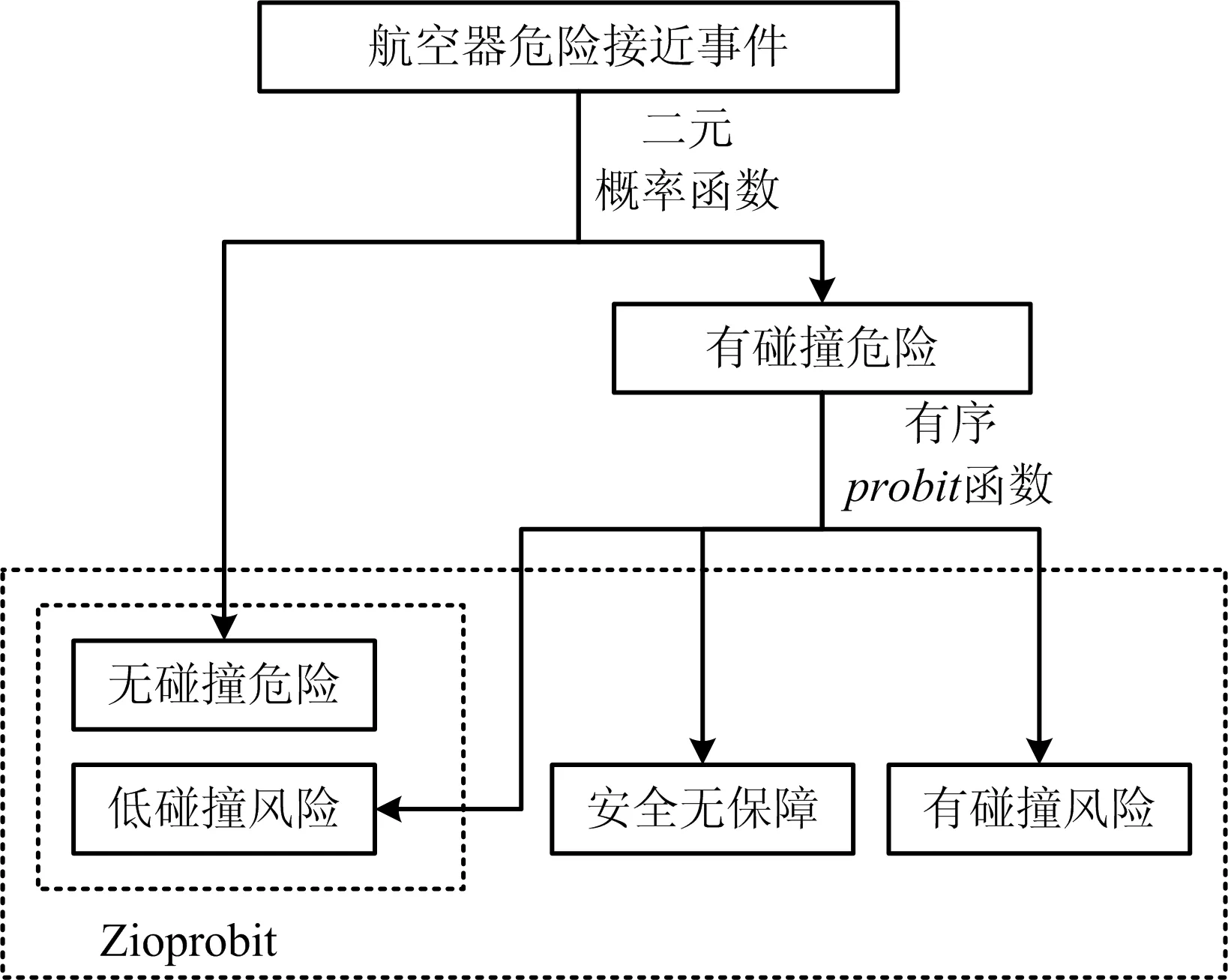
图1 航空器危险接近事件零膨胀有序概率模型框架Fig.1 Framework of zero-inflated ordered probit model for aircraft near-midair collision events
1.1 碰撞风险状态确定
碰撞风险状态分为无碰撞危险和有碰撞危险。2者之间分离函数通过二元概率函数表示,如式(1)所示:
(1)
1.2 不同碰撞风险等级确定

(2)
(3)
式中:Xi为解释变量向量;β为与Xi相关可估计参数的向量;ε为正态分布扰动项;Zi为与观察事件i风险状态结果对应的整数,ki=1时,允许Zi输出结果为0,Zi取值0,1,2;u0和u1为有序概率模型切点估计值,用于区分航空器危险接近事件属于安全无保障还是有碰撞风险。
由式(3)可知,有碰撞危险与无碰撞危险、安全无保障和有碰撞风险结果对应概率分别如式(4)~(6)所示:
P(Zi=0|ki=0)=Φ(-βXi)
(4)
P(Zi=1|ki=0)=Φ(u1-βXi)-Φ(u0-βXi)
(5)
P(Zi=2|ki=0)=1-Φ(u1-βXi)
(6)
1.3 零膨胀有序概率模型构建
零膨胀有序概率模型是统计无碰撞危险状态2种不同类型的零。零膨胀状态下,无碰撞危险事件2种可能类型包括:无碰撞危险事件,ki=1;低碰撞风险事件,不会导致明显后果,即ki=0,Zi=0。因此,无碰撞危险事件的无条件概率P(Z=0|Ci,Xi)由无碰撞危险事件概率和低碰撞风险事件概率相加得到,如式(7)所示:
(7)
有碰撞风险事件发生概率取决于事件属于何种有碰撞危险状态的概率。因此,空中危险接近事件安全无保障和有碰撞风险的无条件概率如式(8)~(9)所示:
P(Zi=1|Ci,Xi)=P(ki=0|Ci)P(Zi=1|Xi)
(8)
P(Zi=2|Ci,Xi)=P(ki=0|Ci)P(Zi=2|Xi)
(9)
2 航空器危险接近事件安全影响因素分析
2.1 数据来源及描述性统计
本文数据选自2018—2020年因素类别标准相对一致的617起航空器危险接近事件统计数据[16]。考虑航空器接近风险有序递进关系,剔除D、E级风险航空器接近事件及事故报告中信息不完整事件,共收集到341起事件及安全影响因素数据。航空器危险接近风险结果类型描述见表1。由表1可知,所有事件中无碰撞危险事件占51.32%,具有“零膨胀”结果特点。
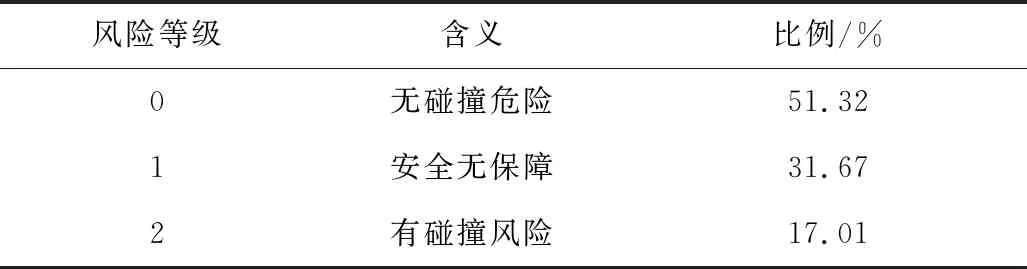
表1 风险结果类型及描述Table 1 Types and description of risk results
1)航空器危险接近事件安全影响因素类别确定
这个设备利用晶体管取代开关。与上述的装置一样,开启和关闭电压用来检测传感器的工况。与利用开关的装置一样,由发动机ECU提供一个5V电压给传感器,当晶体管打开或关闭时会产生端子电压的变化,ECU使用端子电压的变化来检测传感器的工况。另外,有些装置使用12V的电源。
航空器危险接近事件安全影响因素包括地面因素和飞行因素。
地面因素包括空管人员法规、流程、程序的符合性,人员和设备,空管人员对冲突的情景意识和行动,电子警告系统操作和遵守。分析地面因素时,空管人员法规、流程、程序和遵从性表现在行动中,因此将“空管人员法规、流程和程序的符合性”纳入“空管人员对冲突的情景意识和行动”中;“人员和设备”具体表现为人员指导不佳、人员调配不及时及机场空管设备缺乏,出现频率较少,因此删除该类别;“电子警告系统操作和遵守”主要体现在飞行员操作过程中,删除该类别。最终确定航空器危险接近事件地面因素类别为空管人员对冲突的情景意识和行动。
飞行因素包括机组法规、流程、程序的符合性,机组的策略规划与执行,机组对冲突的情景意识和行动,机组的看和避免,电子警告系统操作和遵守。交通密集程度也是影响因素之一,因此,最终确定飞行因素类别包括以下6类:交通状况,机组法规、流程、程序的符合性,机组的策略规划与执行,机组对冲突的情景意识和行动,机组的看和避免,电子警告系统的操作和遵守。
2)航空器危险接近事件安全影响因素确定
通过分析英国航空器危险接近事件报告,确定6类因素类别下具体安全影响因素。对存在交叉关系的因素进行合并:将“个人风险感知事件”和“情景意识和感知事件”合并为“管制员态势感知差”;将“未监测到冲突”和“冲突发现晚”合并为“未发现冲突或发现冲突不及时”;将“没有遵守规则和程序”和“对空管人员的程序执行有偏差”合并为“机组人员程序执行偏差”;将“应答机选择或使用错误”、“误读”和“执行操作不正确或无效”合并为“执行操作不正确或无效”;将“ACAS/TCAS 系统故障”和“2个系统不兼容”合并为“未提供警示信息”。
最终确定以下17个安全影响因素。其中,空管人员对冲突的情景意识包括:提供信息不充分或不及时、管制员态势感知差、未发现冲突或发现冲突不及时、空管指令不恰当、不遵守标准通话;交通状况中包括交通密集;机组法规、流程、程序的符合性包括:机组人员程序执行偏差、侵犯领空(无人驾驶飞机在未获许可的情况下在管制空域飞行);机组的策略规划与执行包括:计划或决策不充分、飞行计划信息资源不充分、执行操作不正确或无效、缺乏行动或行动晚;机组对冲突的情景意识和行动包括:意图沟通无效或不充分、机组缺乏态势感知能力;机组的看和避免包括:未监控其他飞机或监控不及时、视觉信息知觉(飞行员担心其他飞机离得太近);电子警告系统的操作和遵守包括未提供警示信息。
采用STATA软件,利用有序概率模型(oprobit模型)和有序零膨胀概率模型(zioprobit模型)对17个因素初步筛选,删除结果不显著的“缺乏行动或行动晚”因素,得到与碰撞风险结果具有统计显著性的16个安全影响因素。对应得到的16个变量均为二分类变量,因素具体描述性统计见表2。
2.2 结果与分析
为验证零膨胀有序概率模型对航空器危险接近事件分析的有效性,首先,根据模型估计结果,对与无碰撞危险相关安全影响因素进行分析;其次,分析与无碰撞危险相关安全影响因素对无碰撞危险事件风险的贡献水平;最后,对比分析模型拟合效果。
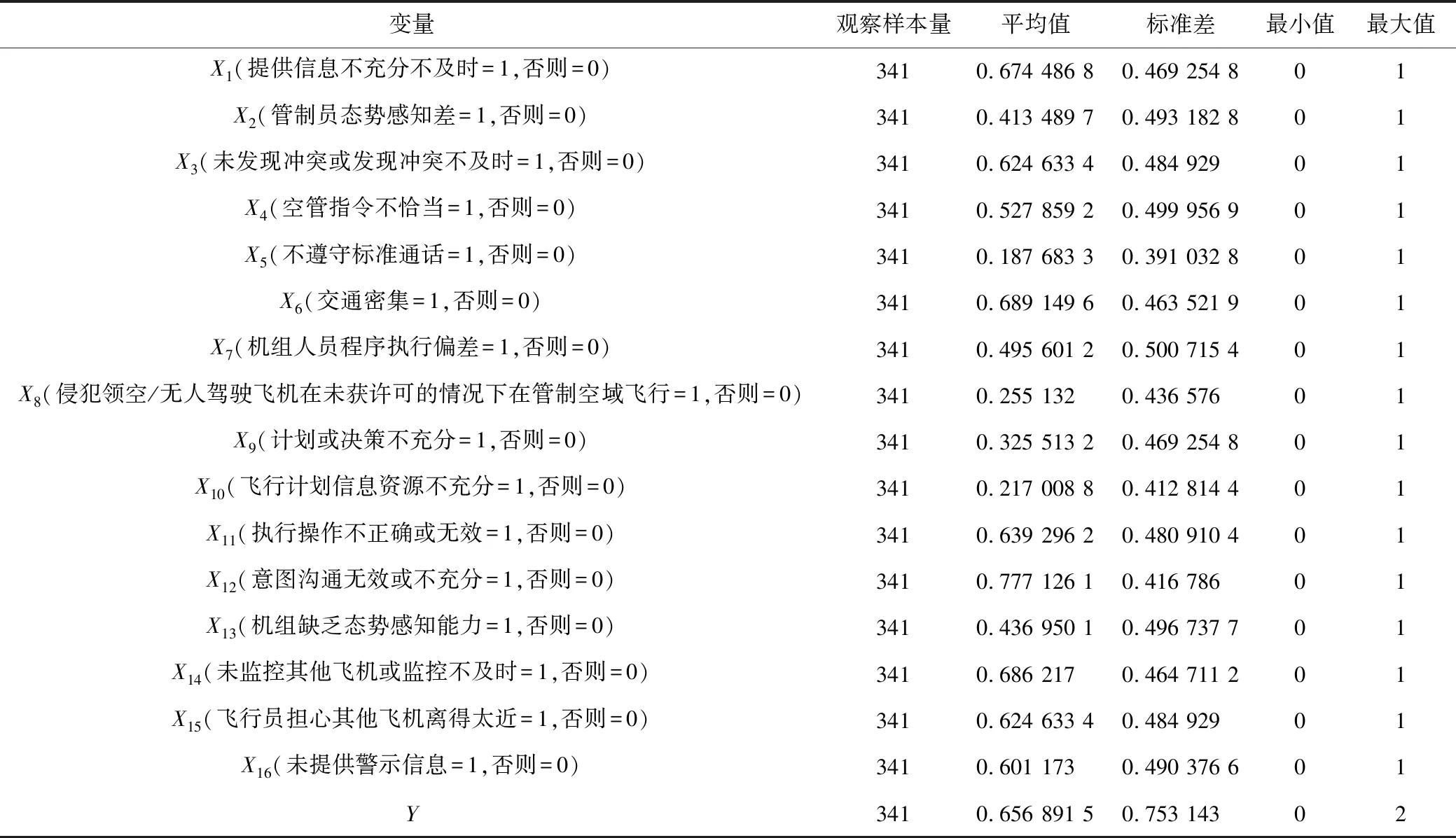
表2 航空器危险接近事件安全影响因素描述性统计Table 2 Descriptive statistics on safety influencing factors of aircraft near-midair collision events
1)航空器危险接近事件安全影响因素分析
利用STATA软件分别得到oprobit模型和zioprobit模型估计结果,见表3。
由表3可知,运用零膨胀有序概率模型,可确定机组人员程序执行偏差X7、侵犯领空(无人驾驶飞机在未获许可的情况下在管制空域飞行)X8、意图沟通无效或不充分X12、未监控其他飞机或监控不及时X14,4个解释变量会显著影响航空器危险接近事件风险进入无碰撞危险状态的可能性。
2)无碰撞危险相关安全影响因素贡献水平
边际效应(marginal effect)可解释变量对结果发生的可能性影响。为确定X7、X8、X12和X14对无碰撞危险事件风险贡献水平,利用STATA软件计算4个解释变量在发生(Xi=1)和不发生(Xi=0)时的边际效应,见表4。
由表4可知,当机组人员程序执行发生偏差时(X7=1),无碰撞危险事件发生概率48.32%,当机组人员程序执行未发生偏差时(X7=0),无碰撞危险事件发生概率55.35%,“机组人员程序执行偏差”使无碰撞危险事件发生概率降低7.03%,即“安全无保障”和“有碰撞风险”事件发生概率增加7.03%;同理,无人驾驶飞机未获许可在管制空域飞行、意图沟通无效或不充分、未监控其他飞机或监控不及时的发生,均会增大“安全无保障”和“有碰撞风险”事件发生概率,概率分别增加4.25%、7.14%和6.03%。
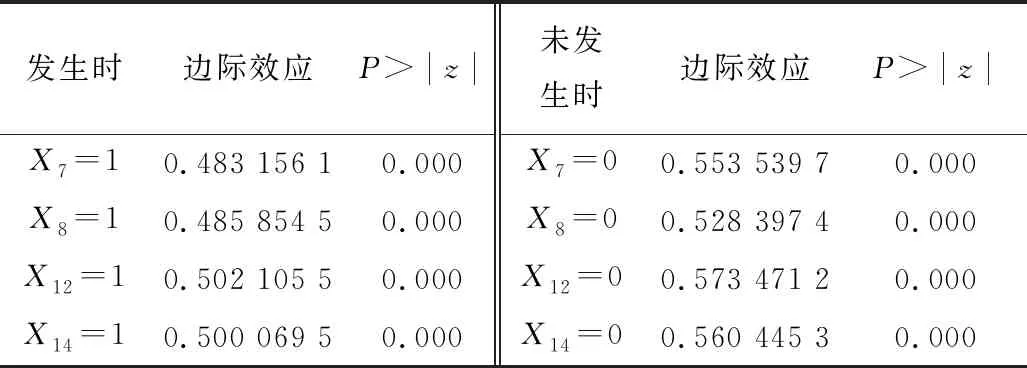
表4 无碰撞危险相关解释变量的边际效应Table 4 Marginal effect of zero collision risk related explanatory variables
3)对比分析模型拟合效果
为检验计数模型适用于传统计数数据模型还是零膨胀计数数据模型,考虑到模型非嵌套性,采用赤池信息准则(AIC)和贝叶斯信息准则(BIC)检验模型,检验结果见表5。由表5可知,zioprobit模型的AIC和BIC值更小,说明zioprobit模型拟合效果更好。

表5 模型检验结果Table 5 Verification results of models
3 结论
1)构建具有“零膨胀”特点、风险等级存在有序递进关系的航空器危险接近事件的零膨胀有序概率模型。
2)与无碰撞危险事件相关的4个安全影响因素会促使航空器接近事件向更高风险方向发展;机组人员程序执行偏差、侵犯领空(无人驾驶飞机在未获许可的情况下在管制空域飞行)、意图沟通无效或不充分、未监控其他飞机或监控不及时会增大航空器危险接近时碰撞风险,增加概率分别为7.03%、4.25%、7.14%和6.03%。
