自制实验教具突破教学重难点
2021-03-08山东省淄博市淄川区寨里镇黉阳中学255100王雪梅
山东省淄博市淄川区寨里镇黉阳中学(255100) 王雪梅
“杠杆”是简单机械一章中非常重要的一节,其重点之一是力臂的学习。力臂的概念比较抽象,在教学过程中很多教师忽视了力的作用线在引入力臂概念时的重要性,学生很难理解力臂概念。另一个重难点是探究杠杆的平衡条件,课本上探究了杠杆在水平位置平衡时的平衡条件,对于杠杆不在水平位置平衡、力的方向与杠杆不垂直等情况下杠杆平衡条件没有探究,不能体现杠杆平衡条件具有普遍适用的特点。于是,笔者通过自制实验教具突破本节的重难点。
1 自制宽杠杆引入力臂概念
杠杆是日常生活中最常见的一种简单机械。在鲁科版8年级下册教材中力臂的概念是直接出示的,“动力臂:从支点到动力作用线的距离;阻力臂:从支点到阻力作用线的距离”。教材内容缺少力臂概念的探究过程,学生不理解力臂概念,不能突破力臂学习这个难点,且在教学中教师比较注重力臂的作图,却不重视力臂与力的作用线的逻辑关系讲解。虽然反复强调力臂画法,学生也不能正确做出动力臂和阻力臂,这对杠杆的学习形成了很大阻碍。为此,笔者设计并列宽杠杆,引入力的作用线概念,探究力臂定义的得出过程。
1.1 实验导入
先让学生亲自体验用一根撬棒撬起重物,学生体会怎样做用力最小。学生通过实验发现手在杠杆末端时撬动物体最省力,手离支点越近越费力。从而学生猜想:用力的大小与支点到力的作用点的距离有关。
1.2 自制教具介绍
该教具由3块长、宽、厚完全相同的塑料板组成。3块塑料板上的O点和A点的位置完全重合。在A点悬挂一个钩码,作为阻力。在右侧分别选择到O点距离不同的A′、B′、C′ 3点,在A′点、B′点、C′点悬挂钩码,调节钩码个数,使3根杠杆分别平衡。
1.3 自制教具运用
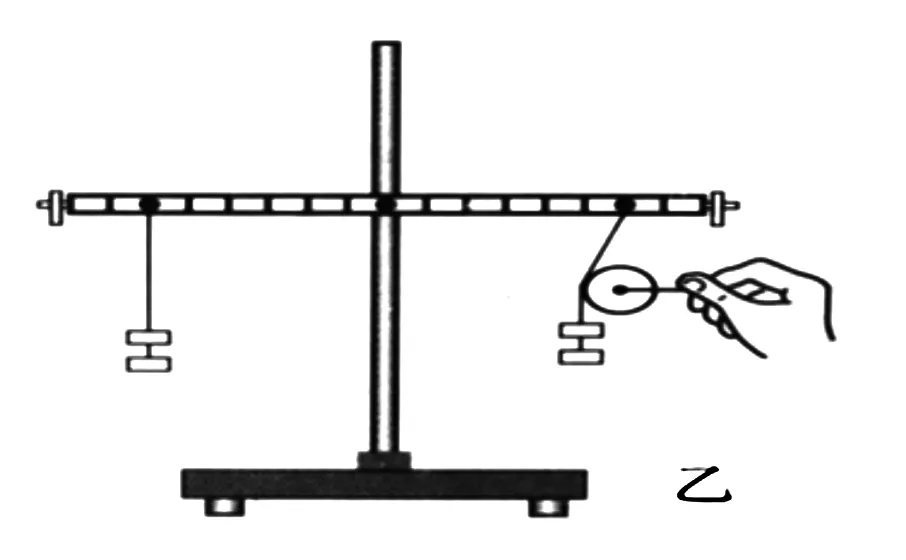
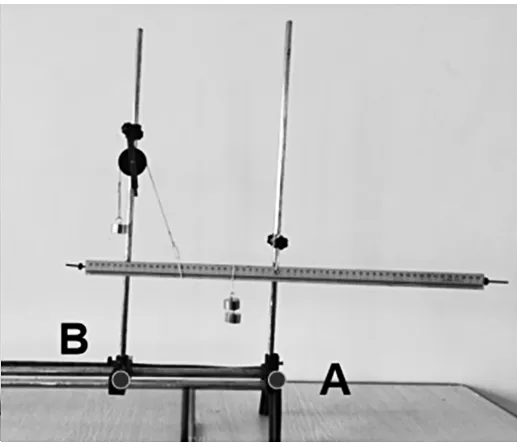
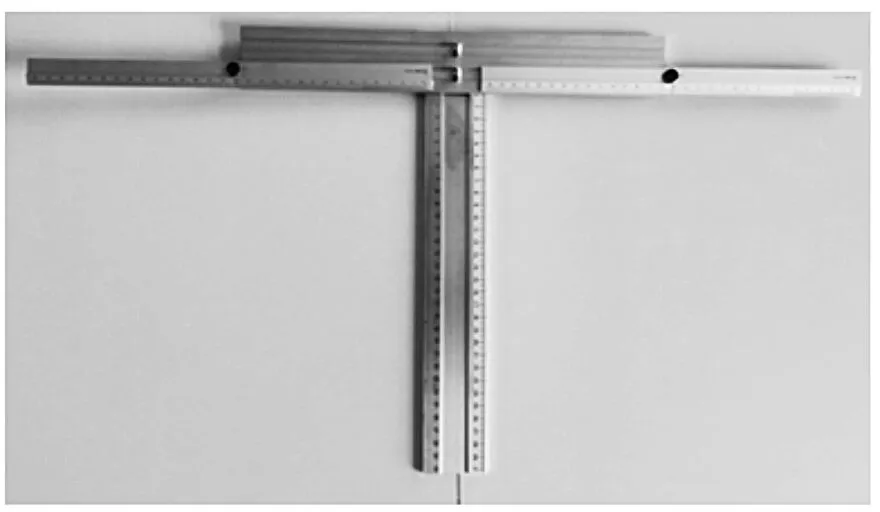
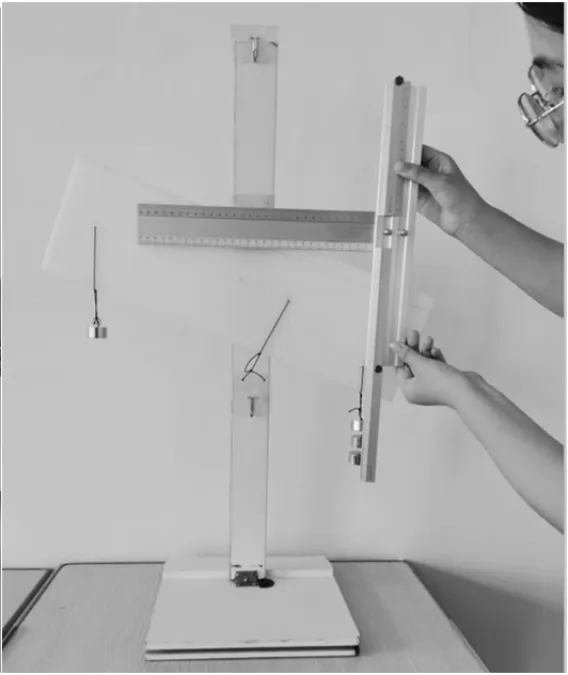
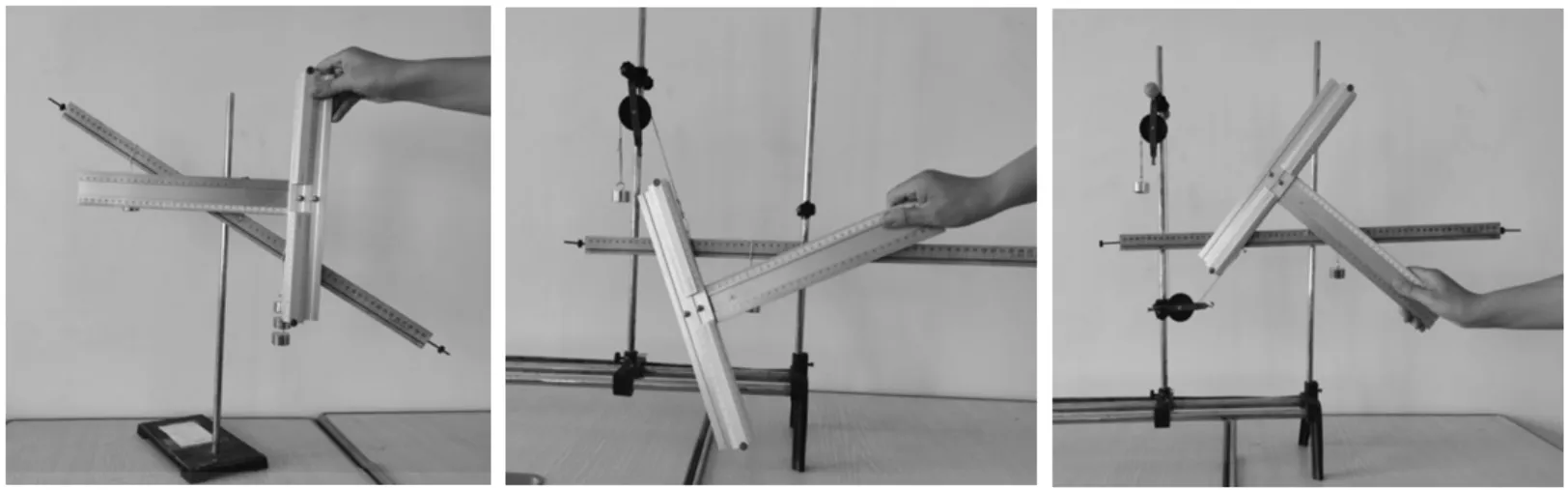
如图1所示,观察发现支点O到作用点(A′、B′、C′)的距离分别是OA′、OB′、OC′,且OA′ 图1 自制教具 通过自制宽杠杆,验证影响力的大小的距离不是支点到力的作用点的距离。找出A′、B′、C′点所用力的共同点,定义力的作用线,这样引入力臂概念,直观反映力臂和力的作用线之间位置关系,使力臂概念得出更具有逻辑性,符合学生认知规律。 鲁科版教材“杠杆”一节“探究杠杆平衡条件”实验中,调节杠杆在水平位置平衡,两侧分别悬挂钩码作为动力和阻力,调节钩码个数和悬挂位置,使杠杆在水平位置平衡。此时力的方向与杠杆垂直,方便读取力臂大小。实际上,这只是杠杆平衡的一种特殊情况,很多杠杆平衡时,力并不与杠杆垂直。笔者利用滑轮和杠杆组合,将铁架安装到光具座上,演示特殊情况下杠杆的平衡。 “杠杆”一节中有这样一个实验(见图2),通过手持定滑轮改变动力的方向,观察杠杆的平衡情况,探究力臂与力的大小的关系。学生实验时发现,装置不稳定,影响实验效果。学生手持定滑轮,不能完成其他实验操作,影响探究实验进度。笔者将滑轮、杠杆、光具座组装,既可以改变力的方向,也可以弥补上述的不足。 图2 教材中的实验 将两根铁架分别固定在光具座上A、B两底座上,(A、B可在光具座上左右移动)。第一种组合方式,在A铁架上悬挂杠杆,调节杠杆在水平位置平衡。在B铁架上固定一个定滑轮,绕线方式如图3所示,此时动力和阻力在支点同侧,动力方向和阻力方向大致相反。第二种组合方式,在B铁架上固定两个定滑轮,两个定滑轮一上一下放置,绕线方式如图4所示,此时动力和阻力在支点的两侧。 图4 组合二 两种实验装置都可以通过左右移动底座B的位置,改变力的方向,进而改变力臂的大小。通过调节钩码个数和细线在杠杆上的位置,使杠杆在水平位置平衡。 组装后的杠杆装置更稳定了,而且可以通过移动底座B改变力的方向,更方便快速,节约实验时间。通过组装后的杠杆装置,能够演示力与杠杠不垂直、动力和阻力在支点同侧、两侧等许多情况下杠杆的平衡情况,有利于学生探究一般情况下杠杆平衡时的平衡条件。 在杠杆学习时,探究力臂与力的关系,教师总是定性的表述,力臂变小,对应的力的大小变大。没有定量的表述力臂与力之间的关系。这是因为力的方向与杠杆不垂直时普通刻度尺不方便测量力臂的大小。于是,笔者设计可折叠T形尺,准确方便测量各种情况下力臂大小。 T形尺采用两段不锈钢尺组成,在竖尺的两侧均有刻度。横尺由两个可折叠尺组成,如图5所示,我们利用两个直角进行力臂的测量。 图5 T形尺 用T形尺测量力臂时,将横尺与拉力方向重合,平行移动竖尺,让支点经过竖尺,通过竖尺刻度读取力臂。如图6所示情况下,要测量力臂需要做力的作用线,我们将可折叠部分打开,延长的T形尺横尺与拉力方向重合,延长的尺子与力的延长线重合,发挥出力的作用线的作用。 图6 折叠T形尺的使用 使用自制可折叠T形尺能方便快速测量各种杠杆平衡时力臂的大小。通过T形尺直观展现力臂和力的作用线的关系,对理解力臂、正确做出力臂有很大帮助。 在课本中,“探究杠杆的平衡条件”实验运用杠杆在水平位置平衡时力与杠杆垂直,通过读取杠杆上的刻度读取力臂,通过钩码的重力读取力的大小。记录数据研究力臂和力之间的关系。运用了由特殊到一般的实验方法。当杠杆不在水平位置平衡或者力与杠杆不垂直时,杠杆的平衡条件是否适用,并没有做出验证。笔者通过将滑轮和杠杆组装装置与可折叠T形尺一起使用,设计实验,探究杠杆的平衡条件。 图7(a)为杠杆不在水平位置平衡,利用钩码重力读取动力和阻力的大小,利用可折叠T形尺测量动力臂和阻力臂的大小。图7(b)为动力和阻力分别在支点两侧。图7(c)为动力和阻力在支点同侧,移动光具座,改变力的方向,调节钩码个数和细线位置,使杠杆平衡,可多次测量动力、动力臂、阻力、阻力臂的值。对多组数据分析,得出杠杆的平衡条件。 (a) (b) (c)图7 实验过程 实验中涵盖了多种情况下杠杆平衡时的数据,既能得出杠杆的平衡条件也能验证教材中杠杆平衡条件的正确性,体现物理规律普遍适用的原则。教材中“探究杠杆平衡条件”研究的是特殊情况下杠杆的平衡,笔者实验设计研究一般情况杠杆平衡时“杠杆的平衡条件”,体现从特殊到一般的物理研究思路,有利于学生形成科学的思维方式。 通过自制教具,突破了力臂定义的得出和探究杠杆平衡条件两个重难点。课堂通过演示实验,使学生理解力臂,对杠杆有了更深刻的认识。不同的情况下“杠杆平衡条件”的得出渗透物理学中解决问题的思想,培养学生科学的思维方式。笔者在细节上,选择不同颜色的线,选取宽杠杆的材料,减小误差,使实验效果更明显。学生进行分组实验,优化实验步骤,使实验简单、高效,提高了课堂教学效率。
2 运用滑轮、杠杆、光具座组合,改变杠杆中力的方向
2.1 实验导入
2.2 教具介绍
2.3 教具优点
3 自制可折叠T形尺测量力臂
3.1 可折叠T形尺介绍
3.2 可折叠T形尺使用
3.3 可折叠T形尺优点
4 探究杠杆的平衡条件
4.1 实验过程
4.2 实验优点
5 教学反思
