基于云模型和DSmT的风电机组状态评估方法
2021-03-06刘林刘沙刘亚陈俊生
刘林,刘沙,刘亚,陈俊生
(1.南方海上风电联合开发有限公司,广东 珠海 519080;2. 重庆大学 电气工程学院,重庆 400065; 3.重庆邮电大学 自动化学院,重庆 400000)
风电的快速发展对风电机组的安全运行提出了更高的要求。风电机组由于所处的位置特殊,维护成本较高,且常年运行于恶劣天气中,其发生事故的可能性大幅增加;因此,国内外许多学者对风电机组的健康运行状态进行研究[1-3]。
目前,风电机组的状态评估方法有基于人工神经网络理论[4]、模糊综合评判[5-7]、高斯混合模型[8]、物元分析[9]。风电机组评估指标偏离正常状态的程度用劣化度来表示,文献[5]对于劣化度的计算没有采用动态思维,实际上风电机组的劣化是一个动态的过程。文献[7]在建立模糊评估模型时,虽然用层次分析法对评估指标赋予了常权值,但是风电机组的运行状态在时刻改变,其运行状态并不能用常权值来准确反映。有学者在常权值的基础上推导变权公式来求得各个评估指标的权重,但是权重的分配在2项及以上指标发生严重偏离的时候就显得不合理[10]。隶属函数是联系隶属度和劣化度的函数,以往文献对于隶属函数的选取有一定的主观性,忽略了随机性。文献[10]针对这一问题,使用模态正态分布隶属函数来对隶属度进行求解。文献[11]提出了正态云,为评估指标劣化度求取隶属度提供了新思路。风电机组的评估结果可能会因为评估指标间发生冲突,得到的结果不准确[12]。考虑到各个评估指标的因素,文献[13]为多个评估指标融合的风电机组健康状态评估方法提供了新思路。目前,风电机组运行状态评估的监测数据多从风电机组监控与数据采集(supervisory control and data acquisition,SCADA)系统获得,数据类型单一[14]。证据理论由Dempster在1967年提出,后来由Shafer推广形成DS证据理论。风电机组的决策级融合大多采用DS证据理论[15],在处理高冲突性信息时,会出现融合后产生悖论或无法融合的情况。DSmT是一种新型且有效的证据冲突组合理论,是由Dezert和Smarandache提出的一种模糊矛盾推理理论,可以看作是DS证据理论的自然延伸[16]。风电机组状态之间的界限是不精确、模糊的,而DSmT能对界限模糊的证据进行融合。
综上所述,文中提出基于云模型和DSmT的风电机组状态评估方法。首先建立动态劣化度模型,求出评估指标的劣化度,由正态云模型求出评估指标隶属度,将其归一化得到概率质量(mass)函数;其次,对形成的mass函数进行DSmT融合,并引入mass函数的快速收敛算法以减小计算量,采用最大信任规则确定评估结果;最后,通过我国华东地区某风场SCADA系统和状态监测系统(condition monitoring system,CMS)的实际监测数据对所提评估方法进行验证分析。
1 风电机组状态评估指标
1.1 评估指标体系
为了能够对风电机组进行在线状态评估,本文融合SCADA系统采样得到的连续数据和CMS得到的传动系统振动数据,对风电机组进行状态评估,以解决SCADA系统数据的单一性问题。根据海上风电场中风电机组结构以及相应监测系统的配置情况,以及技术特点、功能和风险等级的不同,先确定机组的项目层指标,如齿轮箱、发电机、机舱、主轴承、交流部件、外界因素,再选择每个项目层下的主要特征状态参数作为指标层评估指标,构建风电机组的两级状态评价指标体系,如图1所示。
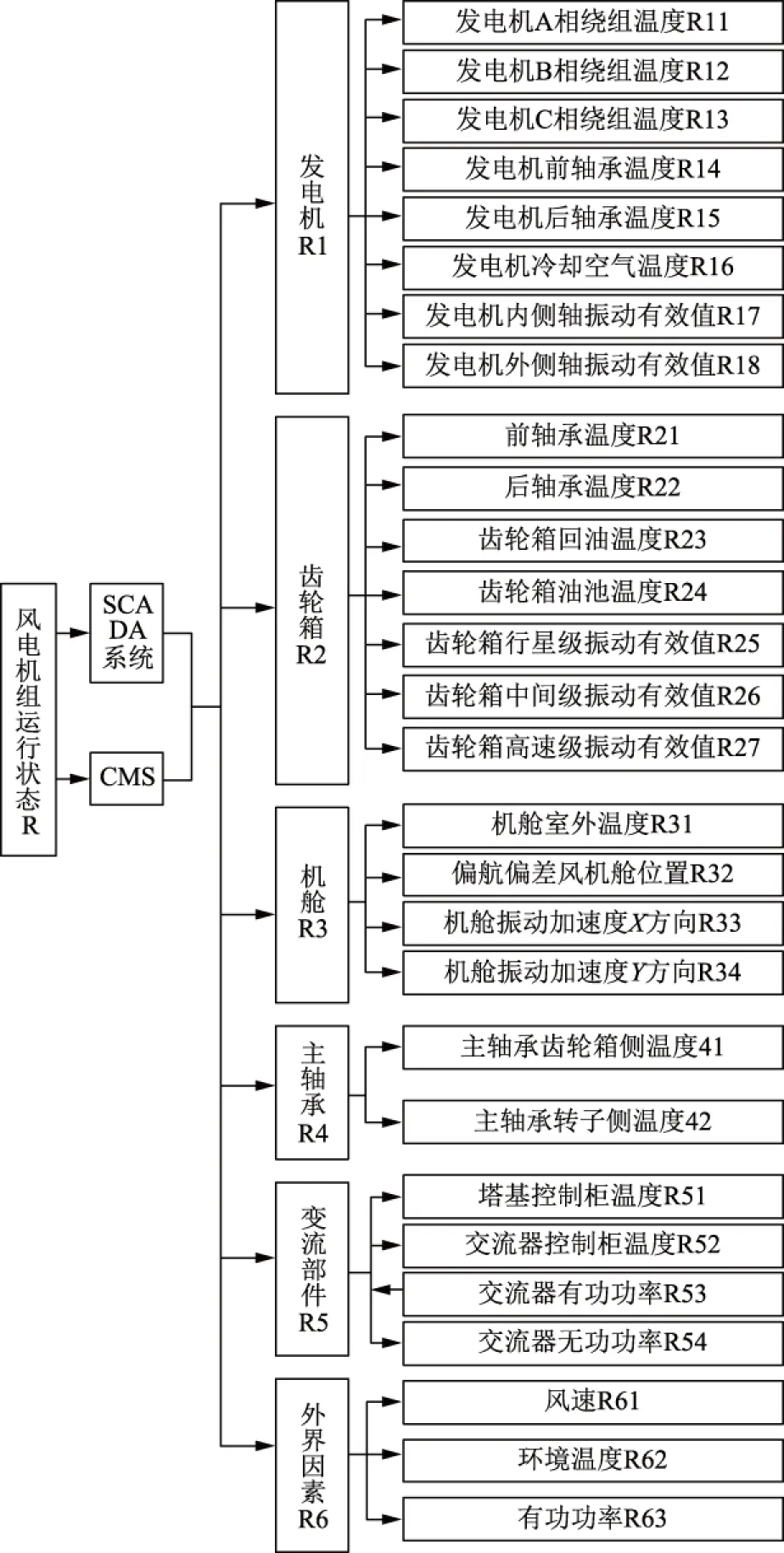
图1 风电机组两级状态评价指标体系Fig.1 Assessment index system for two-level condition of wind turbines
1.2 各指标动态劣化度的确定
风电机组结构复杂,指标参量多[17],引入动态劣化度对这些指标参量的量纲和数量级进行归一化处理[18]。文中根据文献[18]用动态劣化度代替传统劣化度,克服了传统劣化度作为输入所求得的云隶属度无法动态反映评估指标的参数趋势变化所产生的隶属度偏移。
(1)
式中:x为当前监测指标;xmin为监测指标的下限值;xmax为监测指标的上限值;xp为预测值。动态劣化度的确定需要3个参数,其中监测指标的上下限值根据三倍均方差原则进行确定。文中引入马尔科夫链模型的状态转移矩阵来预测下一时刻的值xp[19]。监测指标的参数预测值具体计算步骤如下:
a)将SCADA系统和CMS得到的风电机组历史监测数据进行保存。
b)对于每一个序列,用后一时刻点的值减去当前时刻点的值,从而得到对应评估指标参数变化量的序列。

d)对于每一序列,建立转移概率矩阵
(2)
其中状态转移概率
pij=rij/ri,
(3)
式中:rij为由状态i转为状态j的次数;ri为状态i出现的次数。
e)由步骤c)得到的变化量序列所属的状态区间,得到其所属状态,下一时刻参数趋势变化量为
(4)
式中εmiddle表示所属区间的中间值。
f)由求得的参数变化量加上此时刻值,得到下一时刻的参数预测值为xp=x+Δxi+1。
将预测值代入式(1),求出各指标的动态劣化度。
1.3 运行状态等级划分及隶属度求取
1.3.1 运行状态等级划分
现有的风电机组评估模型中,对于机组运行状态等级划分没有统一的标准。文中将风电机组运行状态分成4个等级,即良好、合格、注意、严重,分别用l1、l2、l3、l4来表示,见表1。

表1 状态等级-劣化度对应表Tab.1 Correspondence table of status level and degradation
1.3.2 云隶属度的确定方法
对于传统的隶属函数确定的主观性,文中根据文献[20]的正态云模型来建立云隶属度。云理论是云模型的核心组成部分[21]。对于1.3.1节中风电机组运行状态的划分,定义4朵云Ck(k=1,2,3,4),用(Ex,En,He)来表示正态云的数字特征[22],其中:Ex表示期望,是最能够代表定性概念的点;熵En综合度量定性概念的模糊度和概率,反映定性概念的不确定性;超熵He反映在数域空间云滴的凝聚度,间接表示云的离散程度和厚度。建立4朵云的期望
(5)
式中:根据表1,取a=0.2,b=0.5,c=0.8。建立4朵云的熵
(6)
确定4朵云的超熵He1=He2=He3=He4=0.005[22],其数字特征计算结果见表2。

表2 数字特征表Tab.2 Digital feature table
由动态劣化度求隶属度
(7)
形成(gd(x),u),即为相对于论域的1个云滴,最终形成足够的云滴形成云。从得到的云模型计算出指标参数的云隶属度。
2 风电机组健康状态评估模型
2.1 DSmT理论简介
2.1.1 识别框架
根据风电机组健康状态等级,形成识别框架为Θ={l1,l2,l3,l4}。DSmT将识别框架的超幂集DΘ中的每个元素看成是1个识别目标,其中,超幂级为识别框架里的元素以及识别框架中元素通过∪或∩的运算组成的所有复合命题的集合。在识别框架下,m(A)为焦元A的广义基本信任赋值,且m(A)满足
(8)
2.1.2 基于云模型的mass函数确定方法
用云模型表示每个状态等级,通过计算每个评估指标劣化度的云滴,从而得到所对应的隶属度。针对评估指标Rij(见图1),根据上述模糊评判指标及评估指标已知动态劣化度,利用云发生器获取该因素对应状态等级的隶属度,当求得所有隶属度之后,可以构建关于该指标的隶属度矩阵,对获得的隶属度按照进行归一化处理,可以得到mass函数
(9)
式中uij(lk)为评估指标Rij在状态k的云隶属度。
2.1.3 DSmT融合规则
本文将各类评估指标看成不同证据体,假定识别框架上性质不同的2个证据体A和B的广义基本信任赋值分别为m1(Ai)、m2(Bj),经典DSmT融合规则为:
(10)
目前大多数文章为简化融合决策运算,采用比例冲突重新分配原则(proportional conflict redistribution,PCR)理论,按照此方法进行融合的计算量非常大,本文利用mass函数的收敛算法来减小计算量,具体步骤见2.1.4节。
2.1.4 mass函数的收敛算法
按照式(10)来进行多源证据体的融合时,计算量大,为了减小计算量,根据文献[23]提出的mass函数的快速收敛算法及本文所提出的识别框架,只需计算识别框架里面元素的广义基本信任赋值。首先将证据进行两两融合,在融合过程中,只计算辨识框架中单元素形成的广义基本信任赋值,假设融合后的广义基本信任赋值为m(lk)。对这些单元素形成的mass函数采用指数重构法对单元素广义基本信任赋值进行修正,即
(11)
式中:α为调节系数;Xi为识别框架各元素的期望数学特征,假设融合之前2个mass函数支持的评估指标值分别为x1、x2,那么所得的期望数学特征
Xi=m1(Ai)×x1+m2(Bi)×x2.
(12)
由于对识别框架内的元素进行修正后,不能满足mass函数之和为1的条件,将部分未知信息分配给识别框架外的子集,即
(13)
式中m′(lΘ)为总未知焦元的基本置信指派。将重构后的mass函数作为融合结果输出。
DSmT融合规则与mass函数的快速收敛算法的具体步骤如下:
a)根据2.1.2节mass函数的求法求出不同证据体的mass函数;令总未知焦元的基本置信指派为0,设子项目层Ri的指标个数为n,则Ri的mass矩阵MRi=
(14)

(15)

(16)
d)重复步骤b)、c)直至完成所有证据体的融合,最终式(14)变成
M′Ri=[m′Ri(l1)m′Ri(l2)m′Ri(l3)
m′Ri(l4)m′Ri(lΘ)].
(17)
e)子项目层融合完成后,将步骤d)得到的子项目层矩阵拼接,形成一个6×5的风电机组整机mass函数,即
M′R=[M′R1M′R2M′R3M′R4M′R5M′R6]T.
(18)
f)重复步骤b)、c)直至完成所有子项目层的融合,式(18)变成


(19)
2.1.5 评估规则确定
对于评估结果的确定,本文采用最大信任规则,对于建立的两级状态评估模型均采用最大信任规则确定评估结果。先确定项目层的评估结果,然后融合项目层的评估结果作为风电机组整机的状态评估结果。
2.2 风电机组状态评估流程
风电机组的状态评估流程如图2所示,具体步骤如下:
a)根据风电机组状态评估指标,建立两级状态评价指标体系;
b)获取SCADA系统和CMS的风电机组运行状态评估指标参数,用后一时刻的值减去当前时刻的值,得到历史数据变化量序列;
c)建立状态转移矩阵,用马尔可夫链模型预测下一时刻的值,求得动态劣化度;
d)建立云模型,求出相应指标的隶属度;
e)用DSmT进行多源证据融合;
f)用指数法重构mass函数,采用最大信任规则来评判风电机组的运行状态。

图2 风电机组状态评估流程Fig.2 State assessment process of wind turbine
3 实例分析
3.1 数据预处理
本文的实验数据来自华东地区某风电场的SCADA系统和CMS,由于SCADA系统的采样频率为1次/min,而CMS 的采样频率为10次/min,二者采样率不同,需要对数据进行预处理,用基于最小二乘法的样条拟合算法使得时间同步[24]。为了保证所使用的数据能够精确地反映风电机组的运行状态,需对得到的监测数据进行清洗,去除弃风、停机、惰走等情况的数据。将随风速变化的温度、振动指标设定为第1类评估指标,劣化度与自身运行或者外界电网参数密切相关的指标设定为第2类评估指标。指标分类见表3。
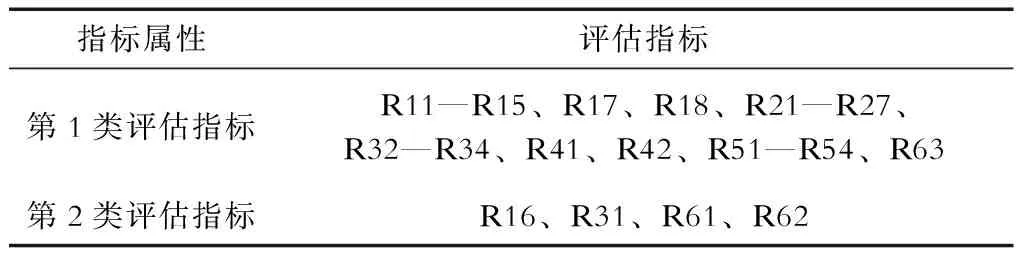
表3 指标分类Tab.3 Index classification
对于第1类评估指标,由于其运行数据常受到风速的影响,建立风速和第1类评估指标的映射关系,将风速区间按照0.5 m/s平均划分,对落在相应区间的评估指标分别进行横向四分位和纵向四分位剔除分散性的数据,再用三倍均差值求出每个评估指标的上下限值。第2类评估指标的上下限值满足风电机组的工程设计。
3.2 实例
2014年5月28日9时42分,华东地区某风电场13号机组由于塔基控制柜温度过高而停机,取该机组停机前48 h、前24 h、前10 h、前8 h、前2 h、前10 min,以及故障时刻7个时刻的监测数据,记录的监测数据见表4,用本文所提出的方法对这7个时刻的风电机组状态进行评估,并与传统DS证据理论融合进行比较。
为了详述本文评估方法的计算过程,以表4中2014-05-28T01:48的监测数据为例,具体计算过程如下。
a)mass函数的确定。根据1.3.2节云隶属度的确定方法求得对应劣化度的隶属度;根据2.1.2节形成mass函数,共有发电机组、齿轮箱、机舱、主轴承、交流部件、外界因素6个子项目层,每个子项目层组成1个mass矩阵,先令识别框架外的未知焦元m′(lΘ)=0,形成6个mass函数矩阵如下:
b)子项目层mass矩阵融合。将各个子项目层的mass函数矩阵用2.1.4节提出的方法进行融合,得到每个子项目层的融合结果如下:
c)项目层mass矩阵融合。根据子项目层融合的mass函数矩阵,最后确定项目层的mass函数。
同理,对M′R进行融合,得到此时风电机组的mass函数M″R=[0 0.088 0.870 0.001 0.041],按照最大信任原则,此时风电机组的运行状态评估为“注意”。
本实例以表4中的数据,对所提出的评估方法和传统证据评估方法进行对比分析。从评估结果可以看出,在机组停机前48 h和前24 h时刻运用本文的评估方法得到的机组的运行状态都为“良好”,在机组停机前8 h时刻运用文中的评估方法得到的机组的运行状态为“合格”,此时计算发电机A相绕组温度的劣化度gd=0.327,由于没有及时发现发电机绕组发热,机组运行8 h后,采用文中所提评估方法得到其运行状态为“注意”,在停机前10 min其运行状态为“严重”,与该机组实际的运行情况相符合。采用传统的DS证据理论来对此机组进行评估时,停机前48 h和前24 h能正确评估风电机组状态,后面的时刻具有延迟性,不能正确评估风电机组状态;本文的方法能提早预测风电机组的状态,更具优越性。

表4 我国华东地区某风电场13号机组的监测数据Tab.4 Monitoring data of No.13 unit in a wind farm in East China

表5 我国华东地区某风电场13号机组的评估结果Tab.5 Assessment results of No.13 unit in a wind farm in East China
4 结束语
本文提出一种基于云模型和证据理论的风电机组状态评估方法,针对隶属函数确定的主观性问题,采用云模型来计算隶属度,再采用DSmT来融合多源信息,同时针对DSmT来融合多源信息时速度慢的问题,结合mass函数的快速算法来对信息进行融合,实现对风电机组状态的评估。以我国华东地区某风场的监测数据为例,证明了文中提出的风电机组健康状态评估方法的有效性。相对于常规算法,本文提出的评估方法更能精准评估风电机组的运行状态,为风电场的状态评估提供了技术参考。
