薄壁4点接触球轴承保持架稳定性研究
2021-03-05张育玮姚廷强刘志明
张育玮, 姚廷强, 刘志明, 成 鑫
(昆明理工大学 机电工程学院, 云南 昆明 650500)
工业机器人已经成为现代化工厂和柔性加工系统中的重要装备,而薄壁轴承又作为工业机器人的关键元件,其性能对机器人有重要影响[1]。如今工业机器人逐步向轻型化发展,一般通用轴承无法满足需求,而采用薄壁轴承能够解决此问题。薄壁轴承质量约为普通同一系列轴承的5%,其横截面积约为普通同一系列轴承的20%,因此采用薄壁轴承可使工业机器人的质量和体积减小;同时依照轻型化要求轴承的安装轴也可采用空心轴[2]。
薄壁4点接触球轴承已经逐步用于工业机器人的肘、腕等部位。日本的NSK和美国的Koydon等公司,在20世纪就已经研制出不同系列且性能可靠的轴承[3]。Rodiguez[4],Eckhat[5]根据刚度、精度、间隙、安装和工况条件,介绍了薄壁轴承的设计方法。谢鹏飞等[6]基于ADAMS软件对双半内圈角接触球轴承的动态性能进行了分析。吉博文等[7]研究了圆柱滚子轴承保持架动力学性能。邓四二等[8]对角接触球轴承保持架动力学性能进行分析,为轴承工况和结构参数的选择提供了参考。洪吉超等[9]研究了滚动轴承的参数化建模及动力学分析。蔡素然等[10]和曾献智等[11]对轴承的结构及主参数进行了深入的研究分析。
课题组基于ADAMS建立薄壁4点接触球轴承的多刚体动力学模型,通过分析保持架类型对薄壁4点接触球轴承的力学性能影响,为参数设计、优化提供参考。
1 薄壁4点接触球轴承多刚体动力学模型
1.1 建立模型
课题组以工业机器人专用薄壁4点接触球轴承为对象,基于ADAMS宏程序建立多刚体模型,轴承结构特征如图1所示,多刚体模型如图2所示,主要的基本参数如表1所示。

图1 轴承结构Figure 1 Bearing structure
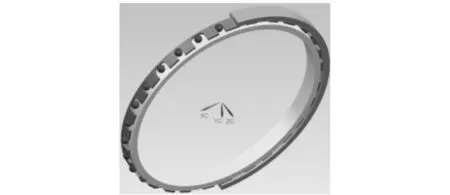
图2 薄壁4点接触球轴承模型图Figure 2 Model drawing of thin-walled four-point contact ball bearing

表1 薄壁4点接触球轴承主要结构参数
套圈选择GCr15轴承钢;滚珠选择GCr15轴承钢;保持架选择黄铜。
在轴承中,保持架起重要作用,使滚珠正常自转和公转。在国外,一些生产薄壁4点接触球轴承的公司,主要采用具备更好耐磨性和机械性能的保持架Ⅰ;在国内,一部分公司选择黄铜作为材料的保持架Ⅱ;而保持架Ⅲ在角接触轴承中应用最为广泛。保持架的结构如图3所示。课题组对以上3种保持架进行对比分析。
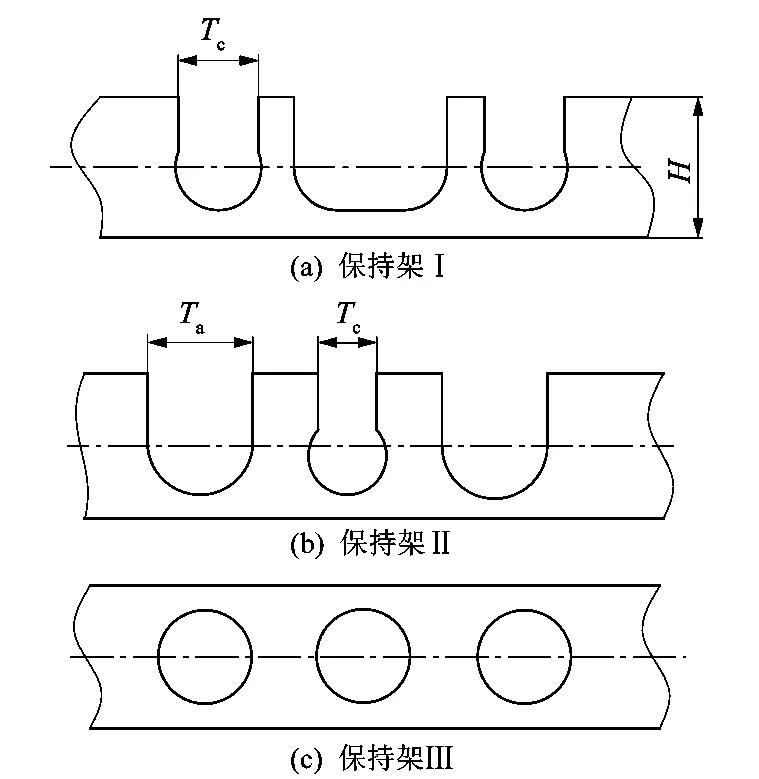
图3 保持架的结构Figure 3 Cage structure
为了便于分析,3种保持架内径、外径和宽度均采用相同参数,除此之外,兜孔的直径和卡口数值也相同。兜孔数目均为29个,但是在保持架Ⅰ中,大兜孔15个,小兜孔14个,具体参数如表2所示。
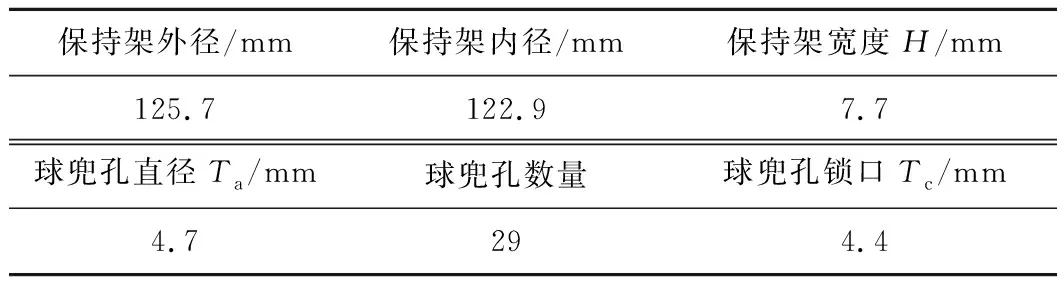
表2 保持架的参数
根据薄壁4点接触球轴承应用于工业机器人中的实际工况,其接触有:内、外套圈与滚珠;保持架和滚珠;保持架和引导套圈。对内、外套圈的2个滚道分别进行编号,外圈滚道分别为W1和W2,内圈滚道分别为N1和N2,如图4所示。对外圈滚道W1施加旋转副,绕轴承的中心线转动。各零部件的具体关系定义如表3所示。

表3 各零部件的关系定义

图4 内、外套圈滚道示意图Figure 4 Schematic diagram of inner and outer ring raceways
1.2 定义接触
ADAMS中,接触力分为弹性力和阻尼力。前者由2物体互相切入产生,后者由2物体互相接触的相对速度产生。运用冲击函数法,由此可得基于罚函数法的迟滞接触力表达式为
Fn=Kδe+CV。
(1)
式中:Fn为法向接触力;K为赫兹接触刚度;δ为接触点的法向穿透深度,通常取0.1 mm;e为力的指数,通常取1.5;C为阻尼系数,取值大小为刚度值的0.1%~1.0%,通常取10~100 N·s/mm;V为接触点法向相对速度。
球轴承接触刚度公式为
k=2.15×105(∑ρ)-1/2nδ-3/2。
(2)
式中:nδ为接触弹性变形系数;∑ρ为主曲率和。
主曲率和为
∑ρ=ρ11+ρ12+ρ21+ρ22。
(3)
轴承无量纲γ为
(4)
对于内圈有
(5)
接触点主曲率差为
(6)
据文献[12]知nδ=0.618,由式(2)得到滚珠与内圈接触刚度为
ki=6.47×105N·mm-3/2。
(7)
对外圈有
(8)
接触点主曲率差为
(9)
据文献[12]知nδ=0.695,由式(2)得到滚珠与外圈接触刚度为
ke=5.55×105N·mm-3/2。
(10)
同理,由式(2)得到滚珠与保持架的接触刚度为
kj=5.95×105N·mm-3/2。
(11)
根据文献[13]中滑动速度与摩擦因数关系知,在ADAMS中,2个物体接触具有相对滑动速度,静、动摩擦之间可以相互转换。当静摩擦转变速度小于相对滑动速度时,ADAMS将使用动摩擦因数继续计算接触力。
本课题中轴承各部分接触取值,具体如表4所示。

表4 接触力参数的取值
2 保持架类型对薄壁4点接触球轴承的力学影响
由滚珠引导,外圈驱动,速度为STEP函数,表达式为STEP(time,0,0,0.01,40*pi)。为了避免初始冲击,设置仿真时间为0.4 s,步长为2 000步,在理想运转状态下分析保持架Ⅰ力学性能。
由图5知,在径向与轴向载荷共同作用下,滚珠与内圈N1接触力呈现周期性变化。因为轴向预紧的影响,所有滚珠都被预紧在主接触中,所以主接触时N1在非载荷区最小接触力不为0,载荷分布角也大于副接触时N2。而滚珠在与内圈N2接触中不预加载,因此滚珠与内圈N2接触力在非载荷区为0。除此之外,滚珠与内圈N1,N2接触力的载荷区分布角大于非载荷区分布角。
图6为径向与轴向载荷共同作用时保持架Ⅰ的角速度。因为滚珠与保持架接触力较小,所以保持架角速度在初始上升与匀速阶段均比较平稳,未见明显波动。

图5 滚珠与内圈接触力Figure 5 Ball and inner ring contact force

图6 保持架Ⅰ角速度Figure 6 Angular velocity of cage Ⅰ
根据球轴承滚道控制理论,把滚珠与套圈简化为纯滚动,得到保持架的理论角速度:
(13)
式中:内圈角速度Ωi=0;外圈角速度Ωe=120 rad/s。
由此得到
ωm=61.92 rad/s。
(14)
保持架角速度理论值为61.92 rad/s,由图6知仿真值为63.93 rad/s,相对误差为3.1%。
滚珠公转速度即为保持架角速度,图7为自转角速度仿真结果。小兜孔滚珠1与大兜孔滚珠2的自转角速度规律相似。滚珠在非载荷区发生摩擦、打滑等现象,速度下降,经过载荷区发生碰撞后速度上升,所以非载荷区与载荷区的速度不同。

图7 滚珠自转角速度Figure 7 Ball rotation speed
根据球轴承滚道控制理论,把滚珠与套圈简化为纯滚动得到滚珠自转理论角速度为
(15)
由式(4)知γ=0.032,内圈角速度Ωi=0,外圈角速度Ωe=120 rad/s,可以得到
ωr=1 622.13 rad/s。
(16)
滚珠自转角速度理论值为1 622.13 rad/s,由图7知仿真有效值为1 903.78 rad/s,相对误差为14.70%。因为把滚珠与套圈简化为纯滚动后计算得出理论值,而仿真过程中滚珠将受到摩擦、碰撞等影响形成变加速运动,所以结果与理论值有一定差异。
图8和图9为外圈质心运动轨迹。由于滚珠刚进入载荷区会发生碰撞,所以每间隔一个非载荷分布角,Z方向振动位移会有轻微波动。而外圈X,Y方向质心位移小,轨迹趋近于一个点,运动稳定。以上所述较为真实模拟了轴承的运动特性。

图8 外圈质心振动位移Figure 8 Vibration displacement of outer ring centroid

图9 外圈质心径向位移Figure 9 Radial displacement of outer ring centroid
在此工况下对3种保持架进行仿真。通过探究滚珠与保持架的接触力、保持架轴向振动位移、保持架径向质心轨迹和滚珠与内圈接触力,讨论不同类型保持架对轴承的力学性能影响。
图10为滚珠1与保持架的接触力随时间变化的时域图。其中保持架Ⅰ与保持架Ⅱ的接触力相差不大,但二者曲线峰值比保持架Ⅲ曲线峰值要大,即保持架Ⅰ、Ⅱ比保持架Ⅲ与滚珠的接触力大。

图10 不同保持架与滚珠接触力Figure 10 Different cage and ball contact force
由图11可以看出,保持架Ⅱ在Z方向上的振动位移最大,保持架Ⅰ比保持架Ⅱ的振动位移小。反观保持架Ⅲ在Z方向上的振动位移,其波浪密集平缓,维持在0刻度线附近,即振动幅度最小,振动频率最大,说明保持架Ⅲ轴向振动位移最小。

图11 不同保持架质心轴向振动位移Figure 11 Axial vibration displacement of different cage centroids
图12中保持架Ⅰ的质心涡动范围最大,虽然整体轨迹呈现较为规则的圆形,但部分轨迹稍紊乱,运动不完全平稳。保持架Ⅱ在X,Y方向上质心轨迹涡动不规则,轨迹异常紊乱,前期处于极其不稳定状态,且此状态维持时间较长。保持架Ⅲ前期涡动轨迹不规则,但平稳后涡动轨迹为范围越来越小的圆形,轨迹差值整体偏小。
通过分析发现,3种保持架的滚珠与内圈接触力皆为周期性变化,并无明显差别,所以这里不再单独讨论。

图12 不同保持架在X,Y方向质心轨迹Figure 12 Centroid track of different cages in X and Y directions
3 结语
课题组依据多体动力学理论,赫兹接触理论,基于ADAMS建立了薄壁4点接触球轴承多刚体动力学模型。通过对保持架仿真分析发现:
1) 保持架Ⅰ和保持架Ⅱ与滚珠的接触力比保持架Ⅲ与滚珠的接触力要大。
2) 保持架Ⅱ在Z方向振动位移最大。而保持架Ⅲ在Z方向上振动位移曲线平缓密集且维持在0附近,振幅最小,即Z方向质心振动位移小,运动稳定。
3) 3种保持架在X,Y方向上质心轨迹差异明显,保持架Ⅰ的质心轨迹涡动范围最大;而保持架Ⅲ的质心轨迹涡动范围小且呈现规则的圆形,涡动范围越小运动越平稳;保持架Ⅱ质心涡动轨迹相比较紊乱,呈现出不规则圆形。综上,保持架Ⅲ运动比较平稳。
