扫路机自主智能驾驶技术研究与应用
2021-03-04福建龙马环卫装备股份有限公司环境产业研究院黄秋芳
福建龙马环卫装备股份有限公司环境产业研究院 黄秋芳
随着经济社会不断发展,环卫行业经历了从人力化向机械化的变革,机械化清扫率逐年提升,但背后也一直伴随着若干个方面的行业难题和痛点。首先,劳动力短缺、人力老化问题。由于环卫工作环境恶劣,劳动强度较大,行业很难招到专业技术人才,从事人力清扫工作的普遍都是高龄人士,从事机械清扫工作的学历又普遍偏低。其次,人员设备安全问题十分突出。环卫工人作业环境恶劣,导致无法长期保持身体健康,而且工人在作业过程中交通事故也时有发生。再次,传统环卫运营模式因缺乏统一的智能管理平台手段,无法科学高效进行实时作业监管,作业效率低下。最后,从业人员人力成本、管理成本在逐年升高,导致整体环卫运营成本也在持续升高。针对这些行业难题,无人驾驶的自主机械化清扫是目前最有效的解决方案,根据环卫运营项目的运营成本测算得出,采用无人驾驶环卫清扫方案预计可以为环卫项目节省60%以上的人力成本,进而节约40%以上的总成本,同步解决环卫工人招聘难、管理难的问题。
无人驾驶作为当前的商业热点话题,有很多应用场景正在被开发,但环卫领域将作为最快实施落地的赛道之一。无人驾驶在乘用车和物流货运领域面临的是开放式环境,要应对很多极端环境,需要积累大量的经验和数据。而现阶段无人驾驶在环卫领域的应用场景更多是封闭式环境,不需要积累很多的数据和测试,就能够有效替换繁琐、辛苦的环卫工作,具有商业和社会双重价值。
在社会价值方面,无人驾驶可以有效地提升清洁车辆的利用率,全程人工智能控制,可以让清扫更加规范,也能够覆盖不适合人工操作的时间段和环境,提升清扫的效率。在经济方面,无人驾驶环卫车预计不到两年即可收回一辆车的软硬件成本。从趋势上看,人工成本必然持续提高,而无人驾驶的软硬件成本则将随着产业高速发展而大幅下降。在技术成熟度方面,无人驾驶环卫车工作速度很低,运营时间多为晚上、凌晨或者非高峰时段,因此更容易做到安全、可靠。有限且相对固定的路线,能够进一步降低作业过程意外出现的概率,如果采用集中运行的方式也更加方便集中监控、调度和异常处理。
因此,解决面向环卫行业清洁自动化、智能化的技术难题,研制开发适用于室内外复杂大环境清扫作业的新一代无人驾驶自主智能清洁车,实现智能化环保清扫作业车的示范应用和推广,是行业技术发展的重点战略方向。本文将面向交通行业和物流行业的智能化和自动化,研究自主智能驾驶汽车在环卫领域暨纯电动扫路机工作场景的应用。
扫路机自主智能驾驶框架
扫路机自主智能驾驶系统的硬件架构主要采用激光雷达作为主要感知传感器,同时结合摄像头、GPS/IMU、毫米波雷达、超声波雷达等[1],以NVIDIA Jetson TX2作为主要计算平台,在域控制工控机上运行各种算法模块,通过线控技术控制车辆行驶。软件架构主要涉及自动驾驶环境感知融合技术、自动导航定位技术以及智能路径规划等技术的研发。即通过多种车载传感器来识别扫路机所处的周边环境状态,并根据所获得的环境信息(包括道路信息、交通信息、车辆位置和障碍物信息等)自主做出分析和判断,从而自主地控制车辆运动,实现扫路机的自主智能驾驶清洁工作。扫路机自主

图1 扫路机自主智能驾驶框架
扫路机自主智能驾驶技术路线
自主智能驾驶扫路机集成激光雷达、GNSS定位系统、惯性导航系统、摄像头、毫米波雷达、超声波雷达、工控机等,通过上下位机及云端控制系统实现扫路机的自主智能驾驶,主要技术路线如图2所示。涉及多传感器信息融合技术、地图创建与实时定位技术、不确定环境下的智能路径规划技术、智能垃圾识别控制技术等自动驾驶技术[2]。
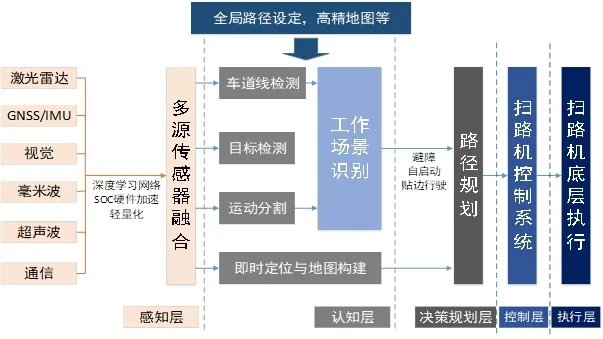
图2 扫路机自主智能驾驶系统技术路线
1.自动环境感知融合技术
自动驾驶扫路机在非结构化动态环境中,通过多源传感器,如摄像头、激光雷达、超声波雷达、毫米波雷达、GPS等不断采集海量多模态数据,这些数据在特征分布、拓扑结构、动态特性等方面均存在较大差异。以胶囊式循环深度学习网络为基础,整合多模态车辆环境信息,采用集成式模型提升目标检测和道路分割的实时性和准确性。在利用视觉算法对多模态、多视角、多任务、三维复杂驾驶场景下的车辆、车道线、行人、交通标示的检测、分割、识别以及道路跟踪基础上[2-3],采用SOC硬件加速的轻量化深度学习网络实现海量视觉影像、点云等多模态异构数据的特征综合提取;同时,利用几何对抗生成网络实现多模态特征的实时融合,设计并实现信息融合的嵌入式智能硬件,实现对未知环境的精确感知。总之,通过自动环境感知融合技术为扫路机工况环境的精确感知及绕避障等功能奠定了技术实现与升级基础。多模态数据时融合技术结构模型图3所示。

图3 多模态数据实时融合技术架构模型
2.自动导航定位技术
结合激光点云和视觉点云的优点[4-5],SLAM(simultaneous localization and mapping,即时定位与地图构建)技术,对未知复杂环境进行精确三维地图构建,结合动态路径规划技术,解决了定位过程中对卫星信号和惯性器件性能的过度依赖问题,提升了自主智能扫路机的定位精度和可靠性,实现对自主智能扫路机的自主定位导航。多传感器融合自动导航定位示意图如图4所示。

图4 多传感器融合自动导航定位技术
面向复杂应用场景下建图与自主定位导航要求,在GPS定位的基础上,通过融合多传感器不同维度的状态向量,根据卡尔曼滤波算法原理,基于贝叶斯概率,进一步优化更新目标的姿态位置等信息。一方面,基于无迹卡尔曼滤波的激光点云定位技术,通过研究点云配准算法,将地图分割成块区域,计算匹配概率,采用局部搜索实现定位,通过研究航向角优化算法,结合光流等信息,进一步矫正自主智能扫路机的位姿,通过研究点云定位中反射值与高度值自适应融合技术根据得到的融合分布计算相应权重,实现反射值与高度值的自适应融合,实现GPS信号波动较大情况下的辅助定位;另一方面,基于视觉的全局定位算法,结合IMU和轮速计信息估计车辆运动,实现GPS、视觉定位和IMU数据整合方法,优化定位结果。提出3D到2D图像的特征匹配定位方法,结合相关粒子滤波算法,实现三维世界到二维图像的匹配定位。
3.智能路径规划技术
利用4G无线通信技术,将自主智能扫路机的整车状态(比如GPS坐标信息,扫路机运行状况,多传感器融合信息等)上传到云端,结合大数据和人工智能加强扫路机对交通态势的理解,实现自主智能驾驶系统的智能路径规划。
根据构建的拓扑级地图,采用启发式搜索算法——A*算法进行动态路径规划,结合实时的交通信息对预先规划好的最优清扫路线进行适时的调整,做出合理的决策和控制。A*算法通过引入估价函数,加快了搜索速度,提高了局部择优算法搜索的精度,是当前较为主流的路径搜索算法。另外,针对特定场景下自主智能扫路机的路径规划,除了结合当天的清扫最佳路线和实时位置,自主地做出最合理的决策和控制外,可利用云端控制系统进行任务调度、车辆管理。智能路径规划框架如图5所示。
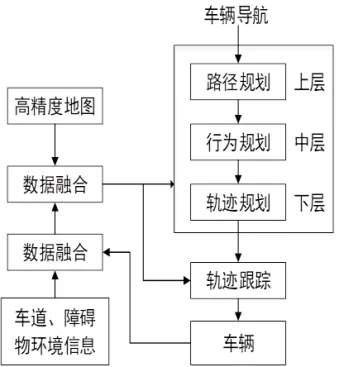
图5 智能路径规划框架
应用前沿AI智能算法及计算机视觉检测技术,在实时系统与路面洁净度定义间建立一种映射机制,使实时视频传感器等测出的垃圾量直接与所检测路面的面积形成比值,从而计算出路面垃圾覆盖率。系统综合垃圾面积覆盖率及种类权重计算出对应路面清扫前的实时洁净度指标,不同的垃圾种类在算法中采用不同权重占比。经过实际的道路测试验证,模型总数据量约236万,模型的实际检测指标如表1所示,扫路机进而可根据实时洁净度指标及作业车速实时自动匹配其风机转速、功率等。

表1 洁净度检测模型指标
当路面洁净度指标大于等于设定阈值时,采用较高转速清扫路面,当路面的垃圾覆盖率小于设定阈值时,采用较低转速清扫路面,且当垃圾量大于设定阈值时系统自动抓拍路面图片上传至云平台作为环卫考核依据,实际道路垃圾检测情况如图6所示。这样,系统在保证清扫效果的同时能够节约能耗,在综合清扫路况下提升节能效率10%~20%,并会适当降低扫路机作业噪声,产生较高的社会经济效

图6 道路垃圾实际检测示例图
扫路机自主智能驾驶技术实现与示范应用
自主智能扫路机通过线控转向系统、制动系统、油门系统及其执行机构的整体设计,利用车载中控的屏幕显示路径规划结果和当前扫路机的运行情况。同时,为了保障编程的便捷性,采用成熟的消息通信机制LCM,实现OBU内的组播通信机制。具体OBU单元的安装位置如表2所示。

表2 OBU单元的组成零部件列表
自主智能驾驶扫路机通过持续地融合应用、优化相关自动驾驶技术与算法,带有自动循迹、 路沿石边缘检测并贴边清扫、遇障碍物停车或绕行、遥控作业、智能语音交互等功能,充分考虑环境感知融合技术的实时性,可实现采样时间(以30张图片和30组点云数据为参考)和融合时间<0.1 s,准确性方面数据融合正确率>96.00%。针对复杂应用场景下的自主导航定位,可实现环境定位精度优于±10 cm。
针对特定园区,自主智能扫路机可根据实际需求提供智能辅助驾驶模式、智能跟随模式、无人驾驶模式、特殊场景远程驾驶仓接管驾驶控制模式。如某园区可将运营时间设定为晚上、凌晨或者非高峰时段(如下午3~4点),并且可根据设置的清扫垃圾回收点、充电站点、停放点采用自动垃圾倾倒系统、智能充电系统及自动泊车系统等自启动方式执行闭环完整的道路清扫保洁工作。自主智能驾驶扫路机园区运营主要特点及主要功能如表3所示。

表3 自主智能驾驶扫路机园区运营主要特点及主要功能
结语
自主智能驾驶纯电动扫路机集激光雷达、摄像头、毫米波雷达等多种车载传感器,可依据路面工况,自动调整清扫保洁模式,高度适应环卫作业环境,实现了自主智能驾驶功能,让清扫车脱离了人工操作,自主在路面上完成清扫、洒水、垃圾收集等工作,有效解决了环卫行业脏、难、效率低等问题,极大地降低了人工成本,同时让清洁更智能、规范、高效。无人驾驶技术在环卫领域率先“跑起来”,将极大地惠及社会服务型工作者,改善环卫工人工作环境,能极大地提升资源运用效率、优化社会管理和服务以及改善居民生活质量。深入研发适用于室内外复杂大环境清扫作业的全新一代无人驾驶环卫清洁车,实现智能化环保清扫作业车的示范应用和推广,其意义不仅在于环卫产品与技术的升级,更有可能带来环卫产业的全新业态和价值链体系的重塑。
