基于互联网的自动网球收集机器人的设计
2021-03-04陈炳炘陈鑫甘新龙刘顺孟源
陈炳炘 陈鑫 甘新龙 刘顺 孟源



关键词:网球收集;互联网;APP功能设计
引言
随着我国经济的飞速发展,人们越来越注重运动,同时运动方式也更加多样化。近年来,网球运动在我国发展迅猛,场馆建设的规模和数量较往年有着显著增长,再加上我国多名网球选手在国际赛事的出色表现,使得网球运动逐渐进入寻常百姓家,国人对网球的热情空前高涨。我国著名网球选手李娜法网封后,WTA官网预测将为中国增加3000万网球人口。近年来,国家为推动服务机器人产业健康发展,提高国际竞争力,出台了一系列的政策。通过不断的构思描摹出其基本框架,分析市场的现有状况,增加了一些新的服务功能。使用SolidWorks等软件进行整体框架设计,使用C语言和Android技术进行软件设计,为该机器人的进一步改进提供理论基础和设计方案]。
1.1设计背景
对于网球爱好者来说,在进行网球训练时,捡网球是一件苦差事。网球场地大且宽阔,打出去的多颗网球要一个个的捡,对于已训练疲惫的练习者来说,无疑是一件枯燥而繁重的工作。在室内网球场中多颗网球堆积在角落,不仅不便于收集,对运动员们的身体也造成了安全隐患。如何才能进行高效且省力的捡球呢,近几年来,智能机械产品层出不穷,结合我们专业的特色,我们想到了制作一款网球智能收集机器人。用户利用手机APP或微信小程序即可远程操控机器人进行捡拾,同时终端可以实时发送驱动指令,使得网球收集机器人能够根据网球场地的实际情况灵活调整行驶路径进行捡拾。让我们在一场酣畅淋漓的训练后,空出双手,好好休整。
1.2设计结构
机器人主体结构部分有:主框架结构、运载系统、升降机构、控制系统、传感系统等。整体以铝和硬塑料为框架,质地轻盈坚固,采用电机驱动车身运行至目标点,然后经过两个前棍子收集网球到小车内第一层,再通过螺旋升降器将第一层内网球运送到第二层,从而实现取球。
用户可通过手机端APP来操控网球智能收集机器人。打开APP,选择机器人总开关,点击启动,机器人便开始运作。进入模式选择,一共有三种模式:
①自动模式:此时机器人会走弓字型路径,不乱跑,不漏球,一行一行覆盖全场,包括边角区域。此外,机器人还有回归功能:当机器人内部感应器感知体内已装至50%时,会向手机发出信号,APP会出现界面和声音提醒,界面会显示已收集多少网球,可选择是否返回。
②定点模式:把一个点作为原点,沿这个点呈螺旋状向外绕圈收集,适合于网球聚集在小区域内的收集工作,减少了时间的损耗。
③沿边模式:这时机器人会沿着网球场边界移动,整体上呈回字型进行收集工作,减少了对球场上运动的干扰,可在运动员进行运动时展开工作,有效地提高了工作效率。
这三种模式使用者可根据实际情况来进行针对性选择。
1)若点击“Yes”。则机器人会停止收集网球,根据手机发出的信号,确定使用者所在的位置,通过路径优化,选择L字型路线回归。
2)若点击“No”。则机器人会继续进行收集工作,直到收集状态为100%,会再次进行提醒。在机器人任意工作时间段,可直接点击回归功能,使机器人直接返回。
机器人整体运行介绍如图3所示:
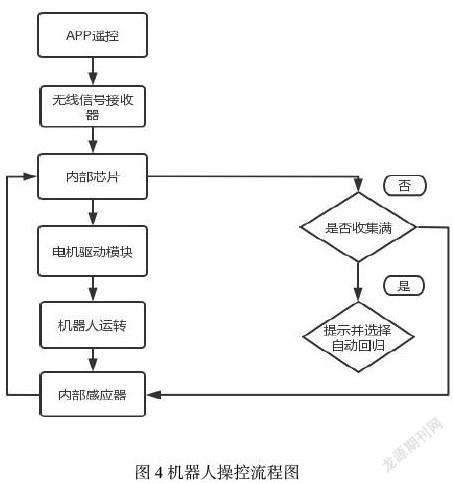
当收集网球到达一定量后,触发机器人内部的感应器,给予反馈信息,并最终将已收集的网球数量呈现到手机屏幕上。伴随着提示音,人们即可做出选择是否让机器人停止运行。选择Yes,机器人将自动回归到释放它时的位置;选择NO,机器人将继续工作,人们也可随时切换机器人工作的模式。
机器人操控流程如图4所示:
3.1产品特点
(1)智能APP端控制
与传统的网球收集器不同,我们的网球收集机器人进行的所有运动与过程都全程由手机端APP操控,大幅减少人工操作机器捡球的工作量,提供智能化的管理。
(2)传感器的应用
我们的网球收集机器人应用了颜色识别传感器,防撞传感器以及光电传感器。可准确识别网球,并在收集途中避开障碍物,减少机器人的损伤。同时还可将网球数量的多少反馈到手机APP。
(3)高能锂电池
在21世纪新能源的发展愈发重要,我们的网球收集机器人也顺应时代潮流和国家号召,追求节能环保的新理念,从而采用高能锂电池。该电池可重复使用,减少了资源的损耗,对环境污染少。
(4)轻薄机身
传统的网球收集器很大且很笨重,因此为减少自身重量对电能的损耗,我们的机器人采用铝和硬塑料作为机身,使其重量减轻且坚固耐用,节约成本。
(5)模式多样
网球场地过大,为了能高效地收集网球,我们给机器人设置四种模式,即自动模式,定点模式,沿边模式,回归模式。
自动模式:适用于球散落得很杂乱,且没有区域板块式得分布状况。
定点模式:设定一个中心点,机器人将围绕着这个点做圆周运动去收集散落在地方这个区域内的网球,实现高效,节能化。
沿边模式:若球大多都掉落在球场的边界区,即可设定一个区域,让机器人沿着场地进行收集工作,大幅提高了机器人运作的效率。
回归模式:机器人收集完网球后,只需人们在小程序或者APP上按动一下按钮即可让机器人回到我们的身旁。
3.2产品优势
经过我们的广泛调查,发现市面上已经存在部分网球捡拾工具,但其中大部分工具的自动化程度不高,仍需人工来进行辅助。这让本已经运动疲劳的人们更加力不从心,产生厌烦的心理。相比之下,我们这款网球收集机器人自动化程度更高,设备还配备有多种传感器,不但能防止收集到其他杂物,还可以辨别障碍物,减少对机体的损伤,延长使用寿命。同时为了提高用户的体验感,该款机器人全程低分贝运行,减少噪音污染,再搭配环保节能的高能锂电池,即可有效提高工作時间,也具有超强的续航能力。在外观上也推出了多种配色,还可根据用户的喜好对外观进行自定义设置,让用户拥有完美的体验。综合市场的具体情况来看,该款网球收集机器人具有很高的市场竞争力。
4产品前景
根据市场调查,目前网球场约85475所,网球运动人数约为864万,并且每年网球运动的人口会以10%-12%以上的速度增长,可以说是市场潜力很大。同时目前市场上并没有多少人专门从事网球捡球这一份工作,即便会有捡球的工作,也会耗费巨大的人力资源成本。
据了解,目前负责捡网球的工作人员工资为7元/每小时,平均年收入约为6120元,反而使用网球智能收集机器人会大大降低人力资源成本。同时对于这种复杂,繁琐及其枯燥的重复机械性运动,我们自主研发用于收集网球的机器人是不二之选,也可节省开支,也满足了网球爱好者们对时尚的追求。
市场竞争日趋激烈,产品现阶段不足之处是缺乏实际的商业运行,因此我们做好了的准备来保障产品的运作流畅性,同时在产品成功发行以后我们会定期回访,获得相应的情况反馈,从而获得改进方向。我们也会根据实际情况中的不足以及大众客户的反馈对产品进行更新换代,去满足大众的需求。
5总结
本文设计的网球收集机器人基于互联网APP工作,利用识别传感系统配合以上设定的三种搜寻模式能够高效率完成作业。随着服务型机器人产业不断发展,以后若用户还有其他额外的需求,我们也会根据客户的反馈建议作出功能上的改善以及技术上的革新。让我们的这款智能机器人的市场价值和使用价值不断提高。
参考文献:
[1]丁正龙,李标,许勇.全方位运动捡球机设计与分析[J].九江学院学报(自然科学版),2019,34(01):43-46.
[2]罗水亮,王磊. 智能网球捡球机系统设计[A]. 北京力学会.北京力学会第二十五届学术年会会议论文集[C].北京力学会:北京力学会,2019:2.
[3]马飞.一种多传感器数据融合的智能捡球机器人结构设计[J].内蒙古师范大学学报(自然科学汉文版),2017,46(04):517-519+523.
[4]孙正阳,王雨欣,万宏强,赵思琪,杨乐.自主运动捡球机设计[J].电子测试,2020(15):8-10.
[5][智惠.网球捡发球机设计[J].工业设计,2017(04):148+150.
[6]张文勇,张儒良,李云松.基于视觉分析的智能拾网球机器人研究[J].电子测试,2020(02):54-55+14.
作者简介:
1.陈炳炘(2000-),男,重庆人,本科,武汉商学院机器人工程专业;主要兴趣和研究方向有机器人的集成设计,智能机器人编程,机器人教育;
2.甘新龙(2000-)男,湖北荆州人,本科,武汉商学院机器人工程专业;主要兴趣和研究方向有机器人的集成设计,智能机器人编程,机器人教育;
3.刘顺(2000-)男,湖北武汉人,本科,武汉商学院机器人工程专业;主要兴趣和研究方向有机器人的集成设计,智能机器人编程,机器人教育;
4.孟源(2001-)男,河南郑州人,本科,武汉商学院机器人工程专业;主要兴趣和研究方向有机器人的集成设计,智能机器人编程,机器人教育;
通讯作者: 陈鑫(1988-),男,湖北武汉人,硕士,武汉商学院教师,工程师;主要研究方向:工业机器人系统仿真,视觉识别。
基金项目:大学生创新创业项目,项目号202111654035, 名称:基于互联网端APP的全自动网球收集机器人