三维实景精细建模在露天矿综合治理中的应用
2021-03-03任东风郝凌云
任东风,郝凌云
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
0 引言
新邱区露天矿位于辽宁西北部,开采始于1937年,过度开采使煤炭资源枯竭,留下长5 km、宽3 km、最深处100 m的矿坑,综合治理矿坑成为亟待解决的问题.根据《辽宁省矿山综合治理条例》,以“变废为宝”的设计理念,利用露天矿特殊地质条件,政企联合成立百年赛道小镇项目,将废弃矿坑改造成越野赛道,不仅解决了现有的地质灾害,并且解决了残余煤炭的燃烧、矿坑塌陷、沉陷等问题,提供探索破解露天煤矿综合治理的“新邱解决方案”.
采用传统测量手段进行地形测量更新慢、成本高,难以满足矿山大面积、高精度测量的需求[1-2].针对地势起伏大、地形复杂地区中采集地物点位置出错率高且危险系数大的劣势[3],以阜新市新邱区百年赛道小镇项目为切入点,从矿山综合治理的实际出发,利用飞马无人机搭载Sony a6000相机获取露天矿坑的地物信息数据,使用Context Capture软件进行特定矿区范围的三维实景建模和精度评定,结合SketchUp个体景观建模,以期通过Skyline软件提供可精确量测的实景模型,并进行空间规划及决策分析,为露天煤矿综合治理方案的概念性规划提供理论依据和数据支持,为“矿坑变赛场”的创意理念的全国推广提供展示平台.
1 倾斜摄影技术
1.1 测量技术介绍
倾斜摄影技术全称为机载多角度倾斜摄影测量技术,主要包括倾斜影像数据获取和倾斜影像数据处理技术[4-5].倾斜影像数据获取技术是通过在同一飞行平台上搭载多台传感器,获取多角度测区影像数据.倾斜影像数据处理技术是利用计算机视觉原理自动识别匹配同名点,生成三维密集点云,构建不规则TIN(TIN),结合POS数据以及地面控制点重构三维模型[6].倾斜影像重叠度高、偏角大、基高比小,这些问题给影像匹配、定向与空三等带来一系列挑战[7].目前主流的倾斜摄影实景建模软件包括美国Context Capture、法国Street Factory、瑞士Pix4d Mapper、以色列 Vision Map、俄罗斯 Photo Scan、Photo Mesh等[8].本文利用飞马无人机进行外业数据采集,获取高分辨率影像数据,再通过内业数据处理,生成高精度三维模型,并结合SketchUp个体景观,实现露天矿三维场景的搭建与规划,技术流程见图1.
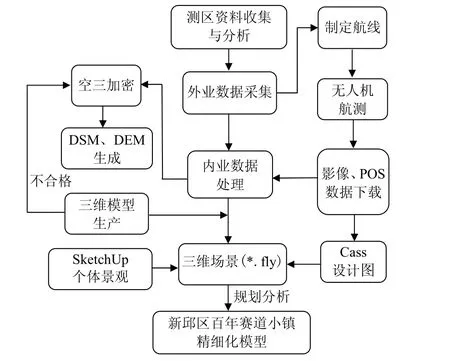
图1 无人机三维实景建模技术流程 Fig.1 production process of UAV scene 3D model
倾斜摄影的优势体现在:①无人机设备相较于传统有人航摄飞机更加便携、灵活、高效、经济,以无人机作为航摄平台能够快速便捷地获取影像;②侧方相机能够直接获取建筑物、树木等实体地物的纹理信息,无需人工逐个粘贴,从根本上丰富了原始影像数据信息,提高建模效率;③用其获取的数据生成的三维模型数据量较小,可直接进行测量和网络传输共享,且模型不仅是一个空间模型,其中还包含大量的地理数据和空间数据,扩展了倾斜摄影技术在行业中的应用.
1.2 测量几何原理
倾斜摄影几何原理见图2.

图2 倾斜摄影几何原理 Fig.2 geometrical principle of oblique photography
几何关系表示为

式中,a为相机倾斜角度,°;b为相机可视角度,°;h为无人机飞行高度,m;D为无人机与多视倾斜影像中对应地物水平距离最大值,m;d为无人机与多视倾斜影像中对应地物水平距离最小值,m.

式中,mmin和mmax分别为无人机倾斜摄影瞬间多视影像最小和最大摄影比例尺;f为镜头焦距,mm.

式中,Davg为角平分线与水平面交点至无人机水平距离,此距离为瞬时多视影像中心至无人机水平距离,m.

式中,mavg为拍照瞬间平均摄影比例尺.
2 原始数据获取与处理
新邱区露天矿是典型的半干旱丘陵区,矿坑面积约7.08 km2,地貌崎岖不平,采坑最大深度约 100 m,边坡角为60°~70°.项目利用无人机搭载多台相机获取倾斜影像数据共6 740张,通过多次航飞获取多期不同施工阶段的影像数据,便于后期进行对比分析.
2.1 像控点的布设与测量
无人机摄影测量可采用飞前布控或飞后布控.此次采用航飞前布控,可分组作业,航飞时影像上已有控制点,利于计算机自动识别影像[9].地面控制点为13个,选择固定地物布设,像控点布设间隔为150~200 m.要求像片中控制点的影像清晰,易判别,应位于航向及旁向至少重叠5张照片,特殊位置保证4张,控制点距像片边缘不小于1 cm.依据卫星定位测量综合服务系统(CORS网)测量地面控制点坐标,同时拍摄布设控制点时的局部照片和整体照片,像控点的布设见图3,为建模中刺像控点提供依据.

图3 像控点布设 Fig.3 layout of image control points
2.2 倾斜摄影数据获取
倾斜摄影采用一站式高精度单兵作业平台—飞马D2000多旋翼无人机,见图4.该无人机拥有GPS定位系统和IMU姿态测量系统,具有可定点悬停、自动避障、遥控可控范围大、续航久、体积小、信号好、抗风强等优点,配备高精度差分GNSS板卡、配和千寻FindCM及FindTrace服务器,结合PPK/RTK融合解算,实现无基站架设,可获取统一基准的高精度参考数据,提高数据采集稳定性.采用低空无人机倾斜建模,具有数据量大、影像倾角大、模型成果数据量大等特点[10],影像POS数据获取方式为高精度差分GNSS,参数见表1.

图4 飞马D2000多旋翼无人机 Fig.4 Feima D2000 multi rotor UAV
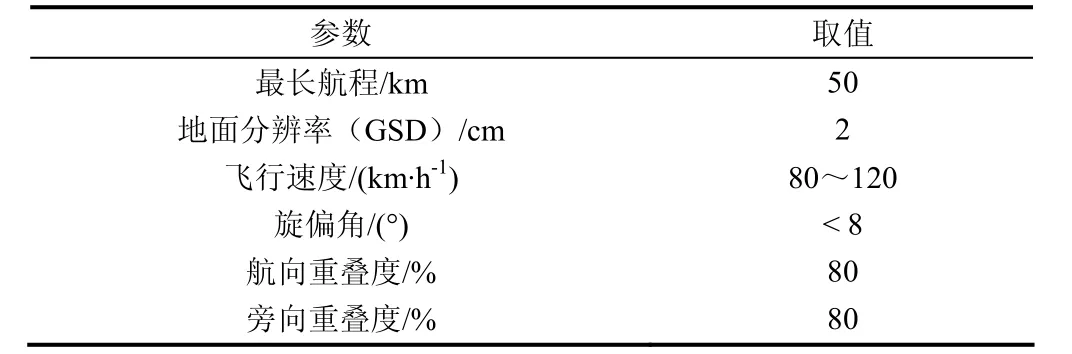
表1 倾斜摄影平台参数 Tab.1 parameters of platform
搭配五镜头倾斜云台,选用Sony a6000相机,型号为SonyILCE-5100,该相机体积小、质量轻,内方位元素和畸变参数标定精确,画质良好,测前相机检校出具单台相机独立检校报告,参数见表2.
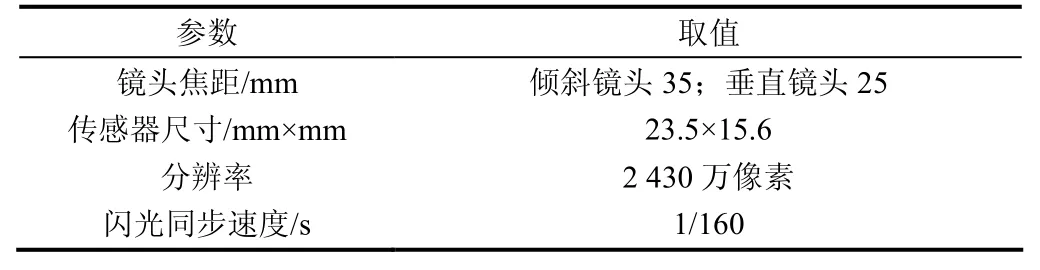
表2 相机参数 Tab.2 parameters of camera
2.3 数据预处理及航线规划
原始数据主要包括POS数据、航飞相片、外业控制点坐标.数据预处理包括改正畸变、按照瓦片格式存储TIFF文件、生成图像金字塔等[11],修改POS数据和格式,检查照片名称和品质,删除试拍照.
采用配套飞马GIS软件设置飞行高度、时间、航线,也可利用手柄手动控制无人机飞行航线.无人机组装完成后,设置起飞点和降落点,为确保将研究区全部覆盖,在软件中进行航线规划,见图5.由于部分矿坑深度达100多米,为尽可能提高地面分辨率,采用变高飞行设计航线,见图6.

图5 航线规划 Fig.5 flight route planning
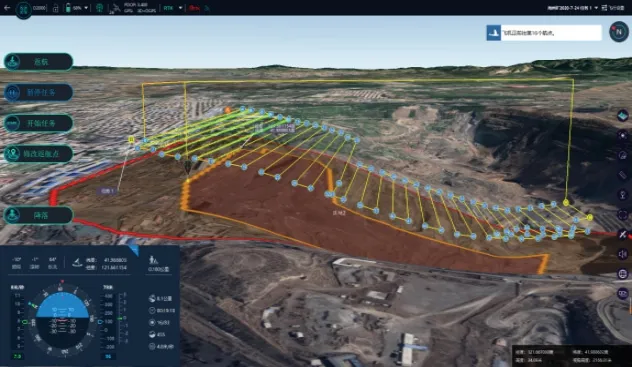
图6 变高航线规划 Fig. 6 variable altitude route planning
3 露天矿三维实景建模
利用Context Capture软件进行三维建模,将像片生成分辨率较高的实景三维模型、正射影像(DOM)和数字表面模型(DSM).此方法具有人工干涉少,数据处理效率高,数据成果多样、多种数据源兼容等优点,并支持局域网中多台电脑集群运算,极大提高运算效率.关键技术包括空中三角测量、倾斜影像密集匹配、DSM点云生成及三维实景建模等.重点是空中三角测量时自动生成三维模型和纹理映射,它为后续数据处理及三维建模奠定基础[12].技术路线见图7.
3.1 倾斜影像联合空中三角测量
空中三角测量以POS数据作为初始外方位元素,共线方程为基础,进行光束法区域网平差处理,提取倾斜影像的特征点,进行像对匹配和同名点的密集匹配,根据成像模型,可计算每个像元的物方坐标.空中三角测量关键步骤为提取照片特征点、匹配同名特征点、影像外方位元素反算.采用基于空间直角坐标系的优化模式,按照控制点的移动实现绝对定向.
影像路径用英文名称,导入像控点后先刺少许边缘控制点,第1次运行空三,查看空三效果.以软件在照片中预测出的控制点位置为参考,查看外业拍摄的局部照片进行准确刺点,每个航带刺点数量不少于9张,通过尽可能多的刺点提高模型精度.对处于照片边缘或位置模糊的控制点,至少刺3张照片.添加控制点的作用:① 有利于空三加密过程中影像匹配的速度和精度;② 对空中三角测量成果进行控制加密;③ 可以对建模成果起到坐标转换作用[10].刺点完成后再次运行空三,若空三排列有序,无明显的交叉和分层现象,处于大致水平面即可进行后续建模.
3.2 模型输出
由空三加密文件通过多视影像联合平差得到高密度数字点云.多视影像联合平差需结合外方位元素,提取同名特征点,在GCP、连接点、连接线之间建立区域网平差的误差方程,联合解算出像片的外方位元素和加密点的物方坐标[13],光束法区域网平差的数学模型为

式中,(u,v)为像点坐标;(u0,v0)为像主点坐标;f为焦距,cm;(X,Y,Z)为物体的物方空间坐标;(Xs,Ys,Zs)为影像外方位线元素;ai,bi,ci(i=1,2,3)为外方位角元素(φ,ω,κ)构成的方向余弦.
密集点云数据量大,先将数据分块后再进行不同层次细节度下的TIN模型构建[14].倾斜影像联合空三后解算出各影像的外方位元素,分析并选择最佳影像匹配单元进行特征匹配和逐像素级匹配,引入并行算法,提高计算效率.基于点云构建不同层次细节度(Levels of Detail)下的TIN模型,通过改变三角形大小匹配影像分辨率,进行TIN格优化[15].
最后对TIN模型进行配准和纹理映射.软件求解模型中每个三角面的法线方向,对比相应位置的照片姿态,模型中任一TIN有且只有一张目标影像与之对应,求解二者夹角,以此为依据判断该TIN模型的纹理贴图.根据二者夹角的数值,判断该三角面与航飞影像贴合程度.若夹角过大,表明匹配不佳,会导致模型纹理不清晰.
自动纹理映射基于瓦片技术,将测区分为多个面积固定的子区域(瓦片).以规则瓦片划分,建模时瓦片大小占用的内存(RAM)为电脑内存的三分之一.计算出相应目标影像后,还需求解具体对应位置.纹理贴图依据TIN中三角形和照片相应位置间的几何关系,寻找实际纹理区间,使纹理影像配准后,反投影到相应三角形表面.分瓦片处理后需建立一个S3C索引文件,用Acute3D Viewer查看同一坐标系下模型最终效果,检查模型是否存在局部缺失、纹理丢失、建筑轮廓模糊等问题.三维实景模型见图8.
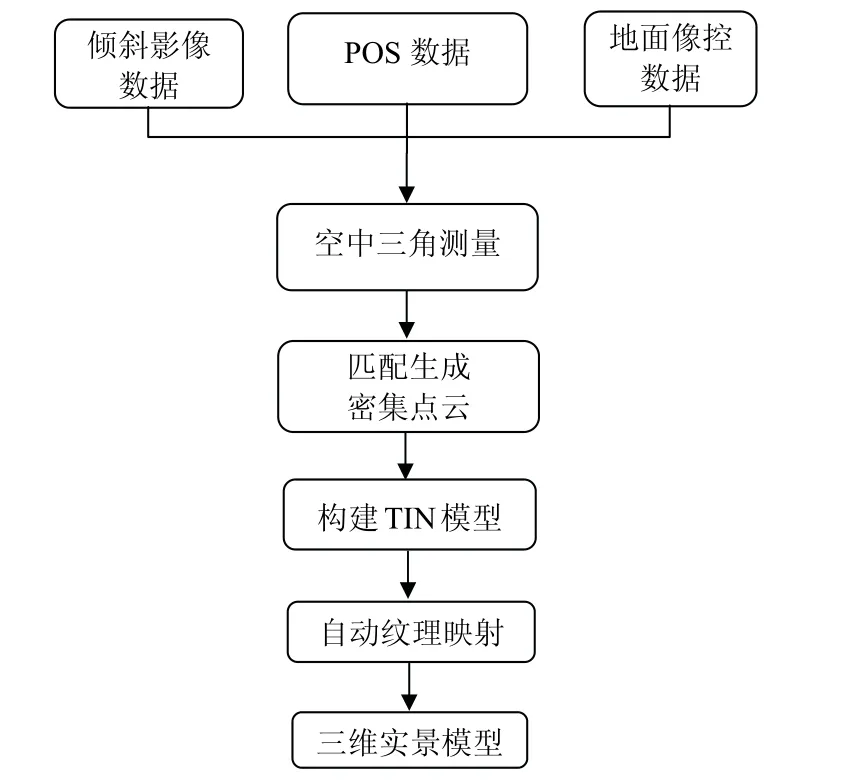
图7 技术路线 Fig.7 technical road
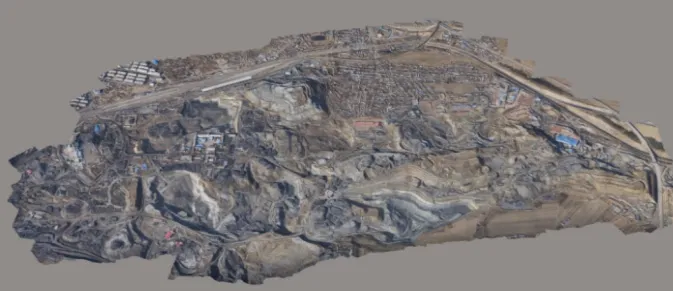
图8 矿山三维实景模型 Fig.8 three-dimensional real model of mine
3.3 模型精度分析
三维实景模型的精度受多种因素影响,例如外业控制点布设的方式和个数、照相机的参数、飞行条件、航飞高度等.精度分析需检查数据完整性、位置精度、表现质量、逻辑一致性等[16].
用人工实测的方式检验精度,选取10个检查点,均匀分布在测区范围内,采用莱卡RTK和相对定位原理,实时解算检查点的三维坐标,检测点分布见图9.在全数字摄影测量系统中加载三维模型,尽可能多次测量检查点平面坐标,取平均值,减少人为误差.以检查点外业测量结果为真值,误差统计见表3.

图9 检测点分布 Fig.9 distribution of detection points
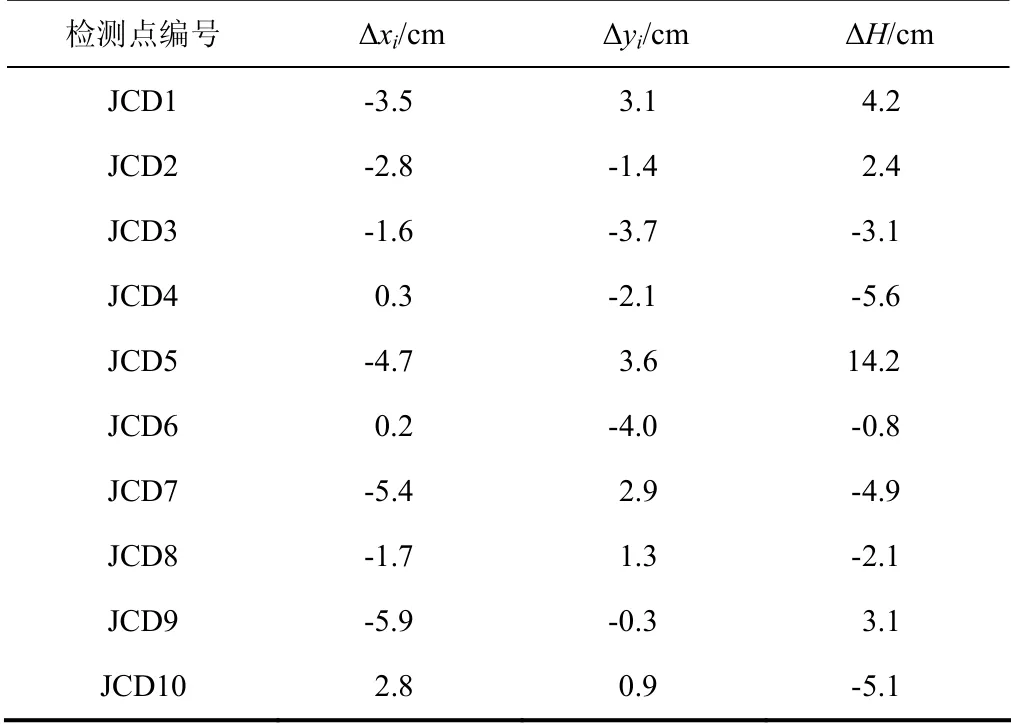
表3 检查点精度误差统计 Tab.3 accuracy statistics of check point
根据中误差公式计算检测点精度.
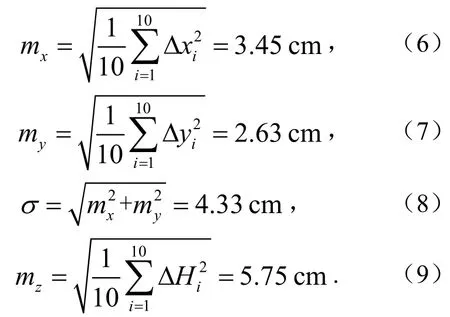
由结果可知,检查点x方向误差mx为3.45 cm,y方向误差my为2.63 cm,点位误差σ为4.33 cm,高程误差mz为5.75 cm.依据《三维地理信息模型数据产品规范》(CH/T 9015-2012)中对平面精度和地形精度的要求,满足1:1 000比例尺下模型平面精度0.8 m,高程精度为1 m的精度要求.
4 实景模型应用于煤矿综合治理
阜新百年赛道小镇项目,基于Context Capture软件生成的三维实景模型,结合科学设计理念,在Skyline平台下利用煤矿废弃矿坑有利的地形条件建设多功能赛道.项目主要服务于百年赛道小镇的前期概念性设计和后期赛场变更规划,同时具有可量测与易规划的显著优势.以5号矿坑为例,进行三维实景模型的规划设计.
4.1 在露天矿综合治理中的应用优势分析
目前该技术在露天矿综合治理中的应用主要体现在以下方面.
(1)避免繁重且危险的实地考察工作.通过三维实景建模技术能够将新邱矿山的地形地貌情况、建筑物和采场情况以及赛道建设情况等信息进行采集,并生成三维实景模型,达到直观设计三维立体的效果,便于施工阶段中数据的测量、分析与浏览,如填挖方量计算、距离或面积的量测、周边拆迁房屋的查看与统计等,为矿山综合治理的精细化管理提供帮助.
(2)依据露天矿实景模型构建的三维空间信息服务平台,可用于周边城市规划建设项目,道路变更,科学地分析和判断现状与治理情况,更好地保障露天矿综合治理的建设,并对后续赛道周边推进环境治理和生态修复提供支撑.
(3)利用无人机航测生成高质量的数字正射影像,进行叠加对比分析,可判断现有实测地形图存在的质量问题,减少外业实地勘察.
4.2 赛道小镇三维实景模型
从BigeMap软件上下载栅格影像,原始坐标需通过地理配准以减少误差.用ArcMap对栅格影像图进行配准,再通过剪裁多余影像部分得到需要的栅格数据.DEM高程数据利用Context Capture软件生成三维实景模型.使用TerraBuilder软件新建一个工程,选球面工程模式并自带高程数据,加载配准完成的影像数据和DEM高程数据,创建MPT文件.此外,Cass设计图通过Arcgis软件进行格式转换.选用TerraExplorer Pro软件创建Fly工程,设置之前在TerraBuilder创建好的MPT文件路径,并加载三维实景模型3DML数据和处理后的设计文件,初步建立了三维场景模型.对特殊要求的个体景观模型需要在SketchUp软件中手动建模,如VIP看台等.部分小型模型可以在Skyline中的SketchUp Warehouse中下载,如小汽车、建筑物里的桌椅等.依据Cass设计图,将个体模型与3DML数据在Skyline平台下通过合理调整大小、位置、角度等属性进行融合.对于赛道的三维规划,可用软件中“Urban Design”模块进行道路设计.根据实际生产需要,选择合理的路面贴图、行道树、路灯等附属设施.虚拟规划成果支持多种类型的空间分析.将模型融合精修后,可进行测量与分析功能,如面积测量、距离测量、阴影分析、剖面分析、空间分析等.技术路线见图10.

图10 技术路线 Fig.10 technical road
由于TerraExplorer Pro软件建模的局限性,结合SketchUp软件进行个体景观单独建模.建模方式一利用现有模型改造,避免重复劳动;二根据实际赛车场地设计需要,按照实际比例构建新模型.图11为建造的VIP看台模型.
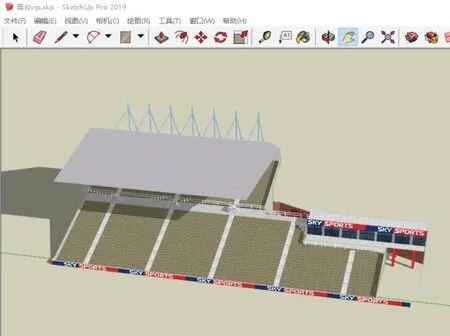
图11 VIP看台模型 Fig.11 model of VIP grandstand
施工阶段中将三维实景模型和道路及看台等设计模型相结合,对比分析得出最佳设计方案.确定赛道选址后,导入看台设计模型,依据现有道路,分析看台安全出口,并设计看台的绿化带.建设过程中,依据建设进度进行多次航飞,实时更新实景模型.规划难点在于道路的坡度、宽度变化及拐弯处模型的圆滑处理.以5号坑为例,治理前后的对比见图12,规划前后的对比见图13.
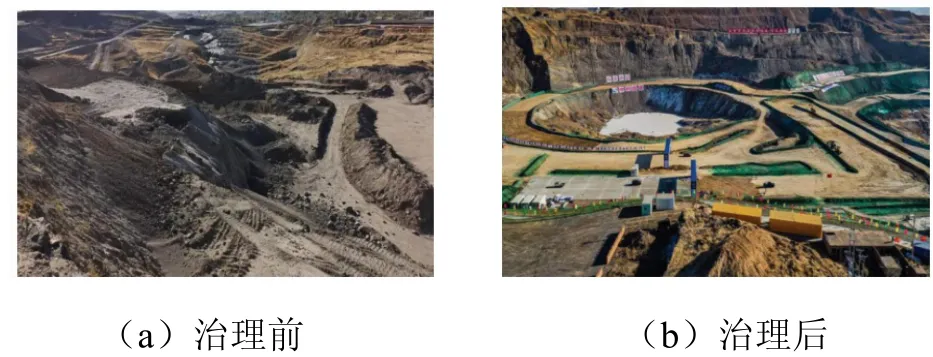
图12 治理前后对比 Fig.12 comparison before and after treatmen
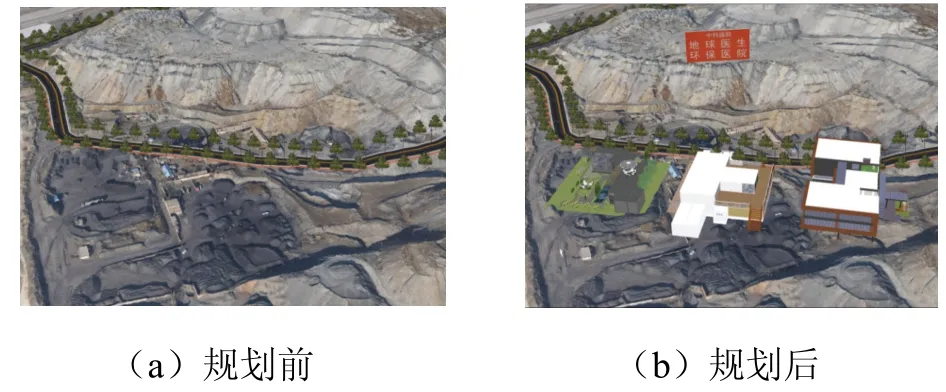
图13 虚拟规划对比 Fig.13 virtual plan comparison
4.3 应用
通过对国内外三维实景模型可视化应用的分析,基于上述生成的露天矿三维可视化实景模型,进行露天矿三维全景浏览、虚拟规划应用、分析,以及大比例尺地形图质量检查.从测绘建模到设计规划再到后期运维,对赛道小镇项目设计、实施、管理有重要意义,为矿坑综合治理高效高质完成提供保障.
(1)虚拟规划成果支持多种类型的空间分析.将模型融合精修后,可以使用系统提供的测量和分析功能,如面积测量、距离测量、土方量计算、阴影分析、剖面分析、空间分析等.
① 土方计算见图14.通过自定义范围可以精确计算出需要添加或移除的土方量.

图14 土方计算 Fig.14 distance measurement
② 阴影分析可以调节x、y方向不同大小的阴影,用来模拟不同时间段、不同季节的日照情况,考察建筑物的室内采光以及相互之间是否存在遮挡阳光等问题,阴影分析见图15.

图15 阴影分析 Fig.15 shadow analysis
③ 通视分析见图16.绿色区域表示通视,红色区域表示不通视,呈现出了在某个地点人眼的可视范围,在空间中选取一点确定为人眼所在位置,然后移动鼠标点击另一位置,这两点之间的距离即检测的可视半径大小,在以人眼位置为中心、所选两点距离长度为半径的范围内的通视情况就由红绿颜色显示.
(2)大比例尺地形图质量检查主要包括数学精度、属性精度、数据正确性及要素完备性、整饰质量及附件质量检查[17].利用正射影像图(DOM)与实测地形图叠加、对比、分析,发现以下几点问题.
① 实测遗漏.图17中DOM有一处简易棚房、路灯及电线杆,而实测地形图中没有,分析发现实测地形图存在漏测.
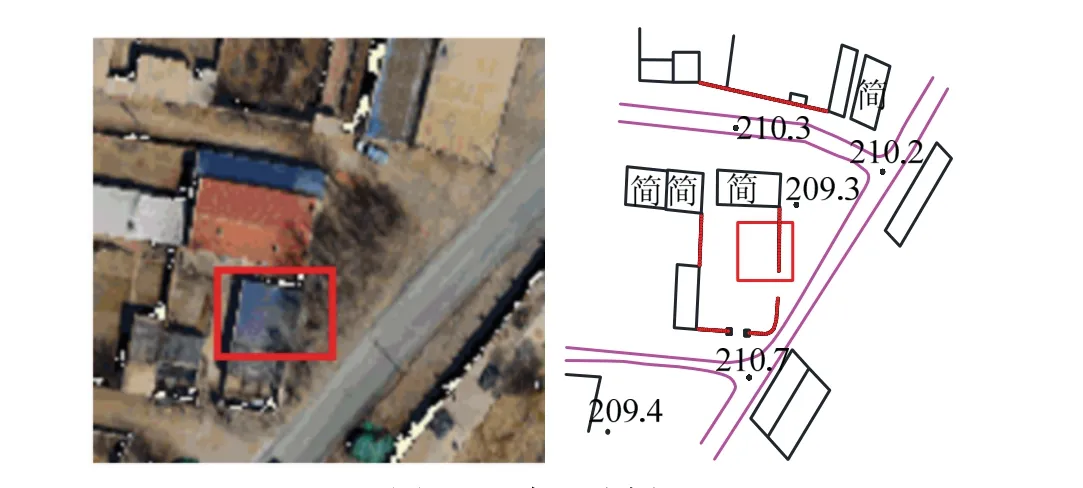
图17 遗漏分析 Fig.17 omission analysis
② 测图错误.图18中存在旱地与林地之间地类表示错误、范围边界错误.根据制图规范不同地物用特殊符号单独表示.
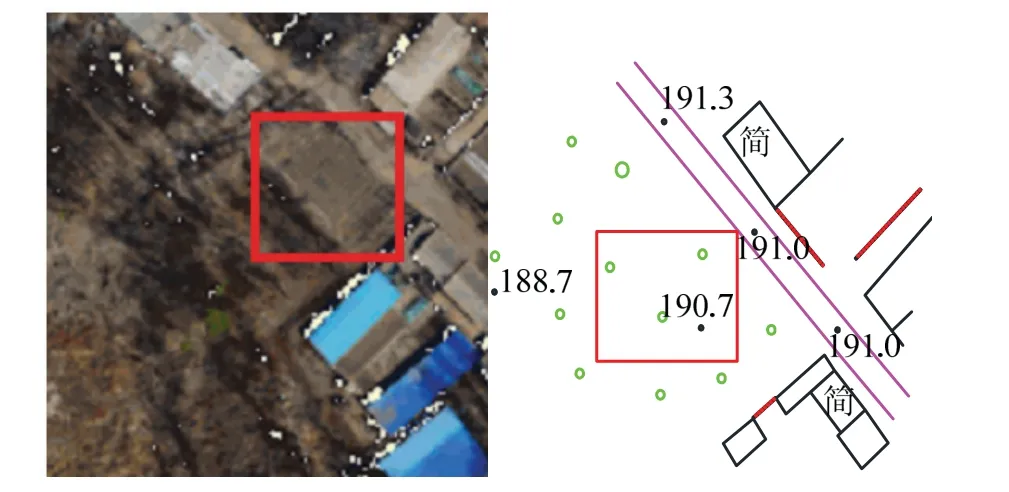
图18 测图错误分析 Fig.18 analysis of mapping errors
③ 地形图不合理.图19中DOM与地形图比对后,表达陡坎不合理,陡坎应用等高线来表示,不应采用斜坡符号,树木要单独表示.

图19 测图不合理分析 Fig.19 analysis of unreasonable mapping
5 结论
在数字化矿山快速发展背景下,结合倾斜摄影测量技术与实景三维建模方法,以新邱区百年赛道小镇项目为契机,使用无人机采集多视影像,获取实时影像数据.利用Context Capture软件进行三维实景建模,结合SketchUp个体景观模型构建矿区三维大场景.
(1)对于面积广阔,地形复杂并存在危险性的露天矿实现了赛道小镇整体空间规划及决策分析等功能.
(2)对于建设中地形图的检核,土方计算等问题提供快捷高效的解决方案.
采用三维实景模型构建的三维大场景自动化程度高,生产成本低,能多维度空间分析,为无人机实景三维精细建模在露天矿综合治理中的规划管理提供新思路.
