实时在线桥梁模态参数自动识别∗
2021-03-03叶春生李琳国
梁 鹏, 贺 敏, 张 阳, 叶春生, 李琳国
(1.长安大学公路学院 西安,710064) (2.长安大学公路大型结构安全教育部工程研究中心 西安,710064)
引 言
模态参数是桥梁状态评估的基本参数,由于实时在线桥梁结构状态评估的需要[1-2],实时在线桥梁结构模态参数识别成为桥梁健康监测研究的重要内容。实时在线长期模态识别的基础是自动化,模态参数实时自动识别需要在理论分析和系统搭建2 个层面协同配合。
在模态参数自动识别理论分析方面,由于随机子空间法识别效果稳定,因此基于稳定图的模态参数自动识别被广泛研究[3-9],最多的是基于聚类算法的模态参数自动识别。按照聚类算法的不同,基于稳定图的模态参数自动识别可分为基于层次聚类[5-8]的稳定图自动识别和基于非层次聚类的稳定图自动识别[3-4,10-11]。基于层次聚类的稳定图自动识别首先计算不同数据点之间的距离,然后通过设定距离阈值,将小于阈值的数据点归为一类,最终达到识别稳定轴的目的。层次聚类的核心是确定合理的距离阈值指标,常用的有定值指标[8]和自动计算的指标[6-7]。非层次聚类的核心是确定准确的聚类个数[10],不合适的聚类个数会直接导致错误的聚类结果。然而,稳定图识别前聚类数目未知,因此非层次聚类的关键问题是如何自动得到准确的聚类数目。
在系统搭建方面,实时在线模态参数自动识别要实现数据采集、传输及分析一体化,涉及硬件、数据传输、软件系统和数据分析多个层面相互配合,缺一不可[12-13]。概括来讲,实现实时在线模态参数自动识别需要解决2 个问题:①数据获取自动化;②数据分析自动化。文献[14-17]设计了专门的桥梁健康监测系统,通过采集系统和数据分析系统,共同自动完成桥梁监测数据处理,但这些桥梁监测系统均没有详细论述模态参数自动识别系统。对于模态参数识别,目前能实现的在线分析大多为频谱分析,虽然文献[18]提到客户/服务器模式版的分析程序,但没有说明在线分析和自动分析的具体内涵。
为实现模态参数自动识别,笔者从理论分析与系统搭建2 个层面入手,首先,引入改进的模糊C 均值聚类算法,解决非层次聚类的聚类数目确定问题,实现稳定图自动识别;其次,提出基于数据解析、数据供给和数据分析的桥梁模态参数实时在线、自动识别体系,在系统层面实现模态参数实时在线连续识别;最后,通过拱桥模型试验验证算法和系统的可行性。
1 模态参数识别理论
1.1 模态参数识别方法
随机子空间法分为协方差驱动和数据驱动的随机子空间法2 种[19]。笔者采用基于参考点的协方差驱动的随机子空间法进行模态参数实时在线识别,步骤如下。
1)根据采集的数据构造Hankel 矩阵y+和y−,其中:y+为所有测点的加速度时程;y−为被选为参考点的加速度时程。
2)计算协方差矩阵H,并对协方差矩阵进行奇异值分解,得到可观测矩阵O。

3)通过观测矩阵形成系统状态矩阵A

其中:†表示矩阵的广义逆。
4)对系统矩阵进行特征值分解,得到结构模态参数

其中:Λ=diag(λi);=ln(λi)/τ,为相应的连续时间状态矩阵的特征值;τ为采样时间间隔。
5)频率ωi和阻尼比ξi通过式(4)计算得到
其中:ai,bi分别为的实部和虚部。
1.2 虚假模态参数辨别指标
由于系统阶次的过估计,识别得到的模态参数存在大量的虚假模态,准确剔除虚假模态参数是保证识别得到真实模态参数的基础。文献[7]对虚假模态参数辨别指标进行了系统论述,将辨别指标分为硬指标和软指标。文献[5-7]提出了基于聚类算法的虚假模态辨别方法,由于该方法对指标数量的选取要求较严格,不合适的指标选取会得到不合适的分析结果,人工干预较明显。相对于软指标,模态参数不确定度是衡量真实与虚假模态参数的有效度量。文献[20-22]证明了虚假模态参数的不确定度与真实模态参数有较大差异,其相较于传统方法具有更好的虚假模态辨别能力。因此,笔者采用模态参数不确定度作为虚假模态参数辨别指标。模态参数不确定度的计算过程可参考文献[20],在此不再赘述。
2 模态参数自动识别
模糊C 均值聚类算法在聚类算法中属于划分法。划分法得到最佳聚类结果的前提是合理的聚类数目,但稳定图合理的聚类数目在稳定图完成聚类之前未知,现有基于划分法的稳定图自动识别都存在最佳聚类数目的取值问题。
笔者引入图像识别领域改进的FCM 算法[23],借助迭代过程,计算不同聚类数目下的隶属度矩阵,构造邻接矩阵和累积邻接矩阵,再引入图像分割领域的迭代图切分算法解析累积邻接矩阵,自动获得最佳聚类数目,实现稳定轴自动识别,具体过程如下。
2.1 FCM 算法
FCM 算法通过数据对不同类的隶属度来衡量数据属于某类的程度。 假设数据集X={x1,x2,…,xn},FCM 的过程是通过最小化目标函数F,把数据集聚成C 类,常用聚类准则为类内加权误差平方和的极小值,即

每个样本属于不同类的隶属度可以写成矩阵的形式,称为隶属度矩阵

FCM 算法通过对聚类中心ci和隶属度矩阵U不断迭代更新,直到F达到收敛条件,完成聚类。
矩阵中的每一列元素表示同一数据属于不同类的隶属度,隶属度越大,表明该数据属于该类的可能性越大。如果某两个列向量在同一行出现最大值,则表明对应的两个数具有较强的相似性,归为一类的可能性较大。FCM 算法的核心是确定聚类数目,因此自动识别的核心是自动获得准确的聚类数目。为解决该问题,笔者引入改进的图像分割算法。首先,采用迭代方法计算不同聚类数目下的隶属度矩阵;其次,构造邻接矩阵和累积邻接矩阵;最后,借助图切分算法实现最佳聚类数目自动确定和稳定图自动识别。
2.2 邻接矩阵和累积邻接矩阵
首先,通过分析隶属度矩阵的列元素大小,将样本点划分到隶属度最大(元素值)的一类,构造n个样本的所属聚类编号组成的一维向量Lc=[l1,l2,…,ln],其中,li代表元素最大值所在行。根据 向 量 构 造 邻 接 矩 阵[23]Oc,其 中,Oc为n×n的 方阵,矩阵元素采用式(7)计算很明显,此过程构造的邻接矩阵为对称矩阵。

然后,设置不同的聚类数目,计算不同聚类数目下的邻接矩阵,并将所有邻接矩阵叠加,形成累积邻接矩阵J

累积邻接矩阵是数据相似性的集中体现。由于具有相似性的数据会在同一个位置出现非零元素,因此当很多不同聚类结果的邻接矩阵合并时,累积邻接矩阵中的对应元素会呈现较大值;相反,当两数据之间的相似性较小时,对应元素值较小。因此,只要能自动准确解析累积邻接矩阵,就能自动获得最佳聚类数目和最佳聚类结果。
2.3 图切分过程
从“图”的角度看,累积邻接矩阵具有图的性质,累积邻接矩阵是一个带权的无向图。因此,采用图论算法中的深度优先搜索算法结合迭代的图切分算法对累积邻接矩阵进行解析,以便获得最佳聚类数目。累积邻接矩阵的切分过程[23]如下。
1)采用深度优先搜索算法查找累积邻接矩阵J中的邻接子图并统计子图个数。
2)迭代切分过程为

3)判断累积邻接矩阵Jt+1是否为零矩阵,如果是,则停止图切分过程;否则,继续进行图切分过程,t=t+1。
4)统计出现次数最多的聚类个数,得到最佳聚类数目。
2.4 基于改进FCM 算法的稳定图自动识别
改进的两阶段稳定图自动识别过程如下:
1)对监测数据进行滤波预处理,选择合适的频带范围提高信号的可识别性,一般采用低通或高通滤波器剔除结构响应数据中的噪声成分;
2)设定参考点数量、Hankel 矩阵分组等基本信息,采用基于参考点的协方差驱动的随机子空间法计算模态参数及其对应的不确定度;
3)设定指标阈值,滤除虚假模态进行稳定图清洗;
4)设置默认最大聚类数目,采用FCM 算法迭代计算不同聚类数目下的隶属度矩阵和邻接矩阵;
5)计算累积邻接矩阵;
6)基于深度优先搜索算法确定最佳聚类数目;
7)根据确定的最佳聚类数目获得稳定图聚类结果;
8)统计每种聚类中稳定点的数量,按类内稳定点数量对识别结果进行排序,选取大于设定值的聚类作为最终需要的真实模态参数。
3 实时在线模态参数自动识别
为了实现模态参数自动识别,提出集成数据解析层、数据供给层和数据分析层的3 层架构体系。模态实时在线自动识别的3 层架构体系如图1 所示。数据解析层解决实时在线模态识别的数据来源问题。数据供给层一方面解决模态识别过程中数据的实时供给问题,另一方面保证模态识别的实时性。数据分析层是实时在线模态参数自动识别的核心算法层,通过模态自动识别算法,实时分析数据供给层提供的监测数据,并输出识别结果。
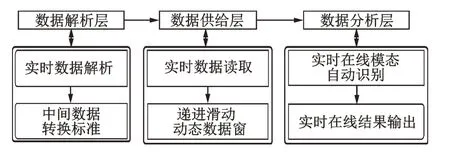
图1 模态实时在线自动识别的3 层架构体系Fig.1 Framework of online automatic modal identification
3.1 实时在线数据传输与解析
数据解析层的功能是实时为数据分析层提供监测数据。数据采集系统采集的监测数据除了要进行离线存储,还要满足分析系统、门户网站等的实时调用需求。数据交互方式的设计应符合在满足实时调用功能的基础上尽可能简单的原则。文献[12-13]提出采用中心数据库的方式作为数据交换媒介。由于用于实时分析的数据不需要存储,还要实时进行历史数据清理,故笔者提出采用更简单的文本格式(txt)的中间数据转换格式实现数据实时交互,将每秒钟解析的监测数据存储在一个txt 文件中,不同传感器的监测数据按不同列存储。
笔者提出的数据存储步骤如下:①根据传感器位置按顺序进行编号;②将解析的每个传感器每秒的监测数据按编号顺序组成数据矩阵,数据矩阵的每一列表示每个传感器采集的结构响应;③将数据矩阵存入txt 文件,形成标准形式的数据转换文本,供模态识别程序读取;④重复步骤2~3,将每秒解析的监测数据不断存入新的文件。
模态自动识别系统实时调用保存的标准格式的txt 文件进行实时在线模态识别。
笔者提出集数据采集、传输和解析为一体的数据采集与转换框架。基于TCP/IP 协议,通过交换机将采集的监测数据直接转换成可供读取的数据格式,供模态识别系统实时调用。实时在线数据解析与传输框架如图2 所示。

图2 实时在线数据解析与传输框架Fig.2 Framework of online data interpretation and transmission
3.2 实时在线模态参数自动识别
实时在线模态参数自动识别通过数据供给层和数据分析层配合完成。通过设计实时在线数据检测、读取、递进的动态可变滑动数据窗和基于改进的FCM 算法的稳定图自动识别,分别解决数据获取、实时性和自动识别的问题。
3.2.1 实时在线数据检测和读取
模态识别数据量应满足最低分析要求,采用实时数据量检测的方法判断是否开始模态识别。设计了数据量实时检测模块,模块可以实时检测保存的标准数据文件量,当满足分析用数据量时,读取数据并传递给模态识别模块。实时检测模块还具有对历史标准数据文件进行删除操作的功能,可以避免历史数据累积引起的存储空间问题。
3.2.2 递进的动态可变滑动数据窗
健康监测系统在实际运营过程中,由于网络、计算机性能等原因造成数据传输和分析不稳定,会严重影响模态自动识别系统的实时性和稳定性。为了适应实际运营状况,满足实时在线分析需求,提出了递进的动态可变滑动数据窗。
定义基于参考点的协方差驱动的随机子空间法,每次分析的数据长度为分析时长,用T表示;第i次与第i+1 次分析的间隔时间称为间隔时长,用t表示;每次分析的耗时称为分析时间,用h表示。间隔时长的衡量标准为数据量,公式为t=ns,其中:n为标准格式数据文件的个数;s为每个标准格式数据文件代表的数据采集时间。通过实时检测标准格式的数据文件量和分析时间,动态调整每次分析的分析时长,形成动态可变数据窗,以适应实际运营环境,保证模态识别的实时在线。递进的动态可变滑动数据窗具体步骤如下。
1)在采样频率固定的条件下,设定每次识别的分析时长和间隔时长。
2)实时检测标准数据文件的数量,判断数据量是否满足分析时长的要求,如果满足,则开始读入监测数据并传递给模态识别模块;否则,继续检测。
3)调用模态参数自动识别模块,自动识别结构模态参数,并记录分析时间。
4)如果分析时间大于间隔时长,则下一次识别过程增加分析时长;否则,按照第i次设定的参数继续计算。
5)删除间隔时长长度的历史数据,重复步骤2~4 进行下一次分析。
分析时长、间隔时长和动态可变滑动数据窗如图3 所示。
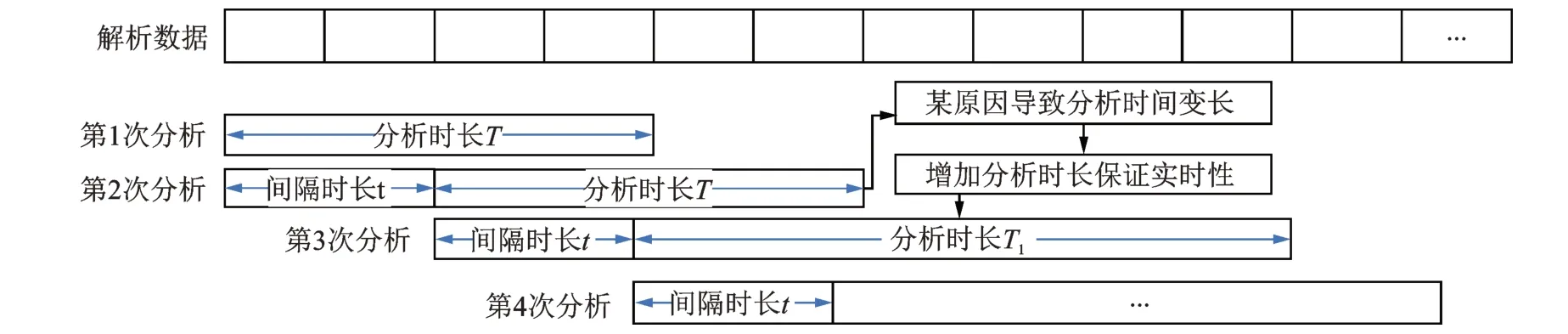
图3 动态可变滑动数据窗Fig.3 Interpretation of stretchable data window
实际结构受温度等环境干扰影响较大,结构模态参数也会发生变化。为保证分析结果的准确性,每次分析时长不应太大,避免因结构属性发生变化而引起的分析结果偏差。
如果对连续性要求不高,间隔时长可以设定为较大值。在实际应用过程中,分析时间会在很小的范围内波动,如果间隔时长大于最大可能产生的分析时间,那么实际分析过程中将不会产生分析时长的调整过程,分析过程可以自动持续进行。当间隔时长设置过大时,可能引起下次分析的数据量不足,在下次分析开始时,系统首先将进行数据量检测,直至数据量足够,再开始分析。
当对分析的连续性要求较高时,最佳间隔时长设定的原则是间隔时长等于或稍大于分析时间。在环境激励的桥梁模态参数自动识别中,为了得到较准确的桥梁模态参数,需要对监测数据进行滤波等处理,因此间隔时间一般会设置的较大。对于试验环境下的桥梁模态参数自动识别,由于采集的结构响应信号信噪比较高,即使采用较少的数据量且不采用滤波算法,也能得到较好的识别结果,因此在试验环境中间隔时长一般较小。
间隔时长一般不建议小于分析时间,因为当每次分析被剔除的数据量小于新存储的标准格式数据量时,数据量就会产生累积。即使分析过程能够自动增加分析时长,减少数据累积程度,仍然不能完全避免数据持续累积的风险。
一般建议稍微降低识别连续性要求,将间隔时长设置稍微大于分析时间,这样即使分析过程中出现少量波动,使得分析时间产生波动,只需少数几次调整分析时长就能保证连续识别的稳健性,同时也能保证系统的稳定性。
3.2.3 实时在线模态参数自动识别
模态识别模块基于改进的FCM 算法完成稳定图自动识别,得到准确的模态参数识别结果。模态识别过程不需要任何人工干预或参数调整,在默认参数下就可以得到最佳聚类结果,完全实现自动化。实时在线模态参数识别整体流程如图4 所示。转换为标准格式的监测数据不断被存入硬盘,并实时进行读取分析。为了不使数据累积、占用较大的存储空间,在下一次分析前应对已经分析过的数据自动删除,然后继续调用分析程序,开始下一次分析。

图4 实时在线模态参数自动识别流程图Fig.4 Flow Chart of online automatic modal identification
4 模型验证
4.1 拱桥模型概况
为了验证提出算法和系统的可行性,搭建Benchmark 力学模型验证平台。为了简化设计,参照实际拱桥进行模型尺寸设计。
实际拱桥为中承式钢管混凝土桁架拱桥结构,计算跨径为248 m,计算矢高为62 m,拱轴线是拱轴系数为1.5 的悬链线。采用1/50 的比例进行缩尺设计,模型全部采用铝合金制作,拱肋等效为矩形截面,拱肋节段首先按缩尺比进行加工,然后通过法兰进行铆接。拱脚采用刚接的方式通过铆钉固定在2个钢箱底座上,钢箱底座通过锚栓固定在地板上避免纵向滑移。模型加速度传感器采用对称布置方案,单侧拱肋5 个,以拱顶为中心,每个传感器间隔为0.8 m,拱桥模型和传感器布置如图5 所示。试验完全模拟了实际健康监测采集传输系统,采用美国国家仪器公司的Crio-9036 采集主机配合9234 加速度采集板卡采集加速度信号,并基于LabVIEW 开发了上位机数据采集软件。在主梁的左、中、右3 个部位分别安装一个激振器对模型进行激振。

图5 拱桥模型和传感器布置图(单位:mm)Fig.5 Bridge model and sensor layout (unit:mm)
4.2 实时在线模态参数自动识别
进行数据分析的电脑通过交换机与采集主机连接,数据解析模块基于TCP/IP 协议实时获取监测数据并进行解析,解析的监测数据按标准文本格式保存。
传感器编号从左向右依次编号为1~5,另一侧拱肋的传感器也从左向右依次编号为6~10,因此,标准格式的txt 转换文件中共有10 列数据,每列存储每个传感器1s 的监测数据量。加速度传感器采用中国地震局工程力学研究所研发的991B 型拾振器。采样频率应满足奈奎斯特采样定理,建议采样时尽量取较大的采样频率,可以在分析时对数据进行重采样处理。Benchmark 模型结构刚度较大,为获得100 Hz 前的模态识别结果,采用软件默认的1652 Hz 采样频率进行结构加速度响应信号采集。
为确定合理的分析时长和间隔时长,需要对监测数据进行初步分析。图6 为不同分析时长的稳定图分析结果。可以看到,3 种分析工况都可以得到清晰的稳定轴。采用Intel Xeon Gold 6126T 双核48 线程处理器的工作站,3 种工况的分析时间随着数据量的减少逐渐减少,分析时间依次为72,63 和57 s。
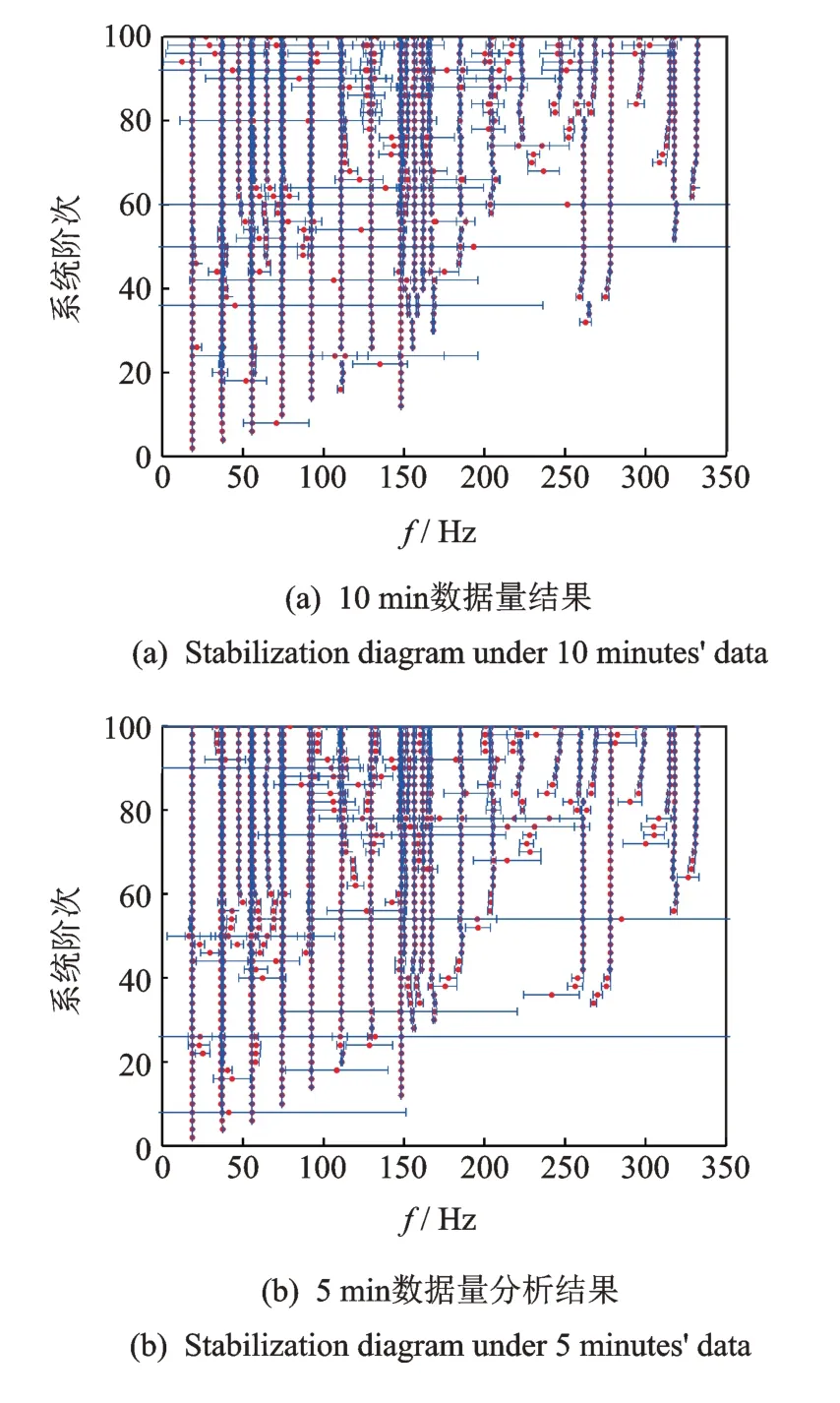
实验室采集的结构响应数据信噪比较高,上述分析过程均没有对数据进行重采样和滤波处理。理论上,采用10,5 和2 min 的分析时长均可以得到较好的识别结果,但较小的分析时长伴随着较小的分析时间和间隔时长,从而可以保证模态识别具有较高的连续性。因此,笔者采用2 min 未滤波的监测数据(即分析时长为2 min),间隔时长取稍大于分析时间的1 min,然后进行实时在线模态参数自动识别。

图6 不同分析时长稳定图分析结果Fig.6 Stabilization diagram under different amount of data
数据解析模块将每秒解析的数据存入到一个文件中。开始分析后,数据读取程序实时检测保存的文件数量,每进行一次检测就返回当前数据量,当数据量达到分析时长要求时开始模态识别。
图7 为基于硬指标剔除虚假模态参数后的剩余识别结果及不确定度。虚假模态参数具有较大的不确定度,滤除不确定度占模态参数均值比例在1.5 %以上的识别结果,剔除虚假结果后剩余结果得到的稳定图如图8 所示。可以看到,模态参数不确定度能够很好地辨别真实和虚假模态,剔除虚假模态参数。
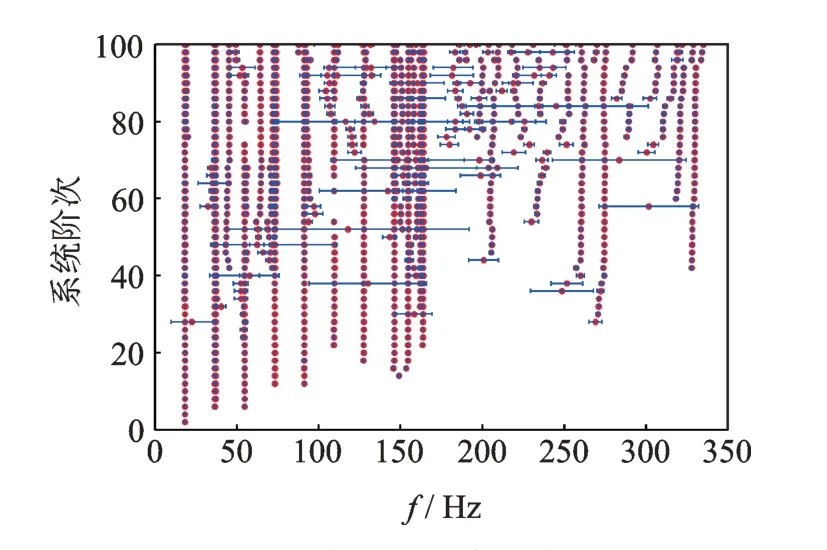
图7 识别结果及其不确定度Fig.7 All identified results and their uncertainties
设定改进的FCM 算法的默认参数为30,进行稳定轴自动识别,剔除稳定点数量少于20 的稳定轴,前170 Hz 的稳定轴自动聚类结果如图9所示。
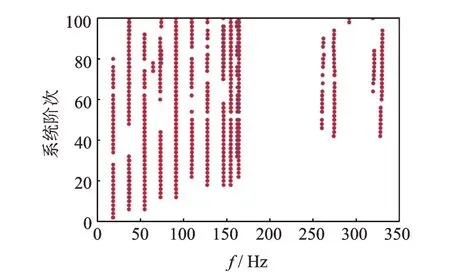
图8 剔除虚假结果后剩余结果Fig.8 Remained results after elimination the false modes
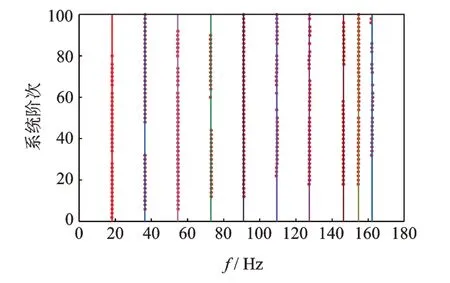
图9 稳定轴自动聚类结果Fig.9 Automatic clustering results
识别得到的前5 阶自动识别结果与有限元结果对比如表1 所示。本次试验只采集了竖向加速度信号,故只识别得到竖向振型。图10 为3 次样条插值后识别的前5 阶模态识别振型。识别结果与有限元结果基本匹配,实测振型两拱肋有些许差别,这可能是由传感器安装不完全对称或者模型本身的差异造成。

表1 自动识别结果与有限元结果对比Tab.1 Comparison of Identified Frequencies with FEMHz
识别过程表明:改进的FCM 算法在不需要任何人工干预的条件下就能自动识别稳定图,得到真实模态参数;提出的实时在线模态识别系统框架可以满足实时在线分析需求,数据解析转换过程和文件形式的数据交互方式能够实时为模态识别系统提供监测数据。可见,笔者引入的模态参数自动识别方法和建立的识别系统能够用于桥梁健康监测系统,系统级实现实时在线桥梁模态参数自动识别。
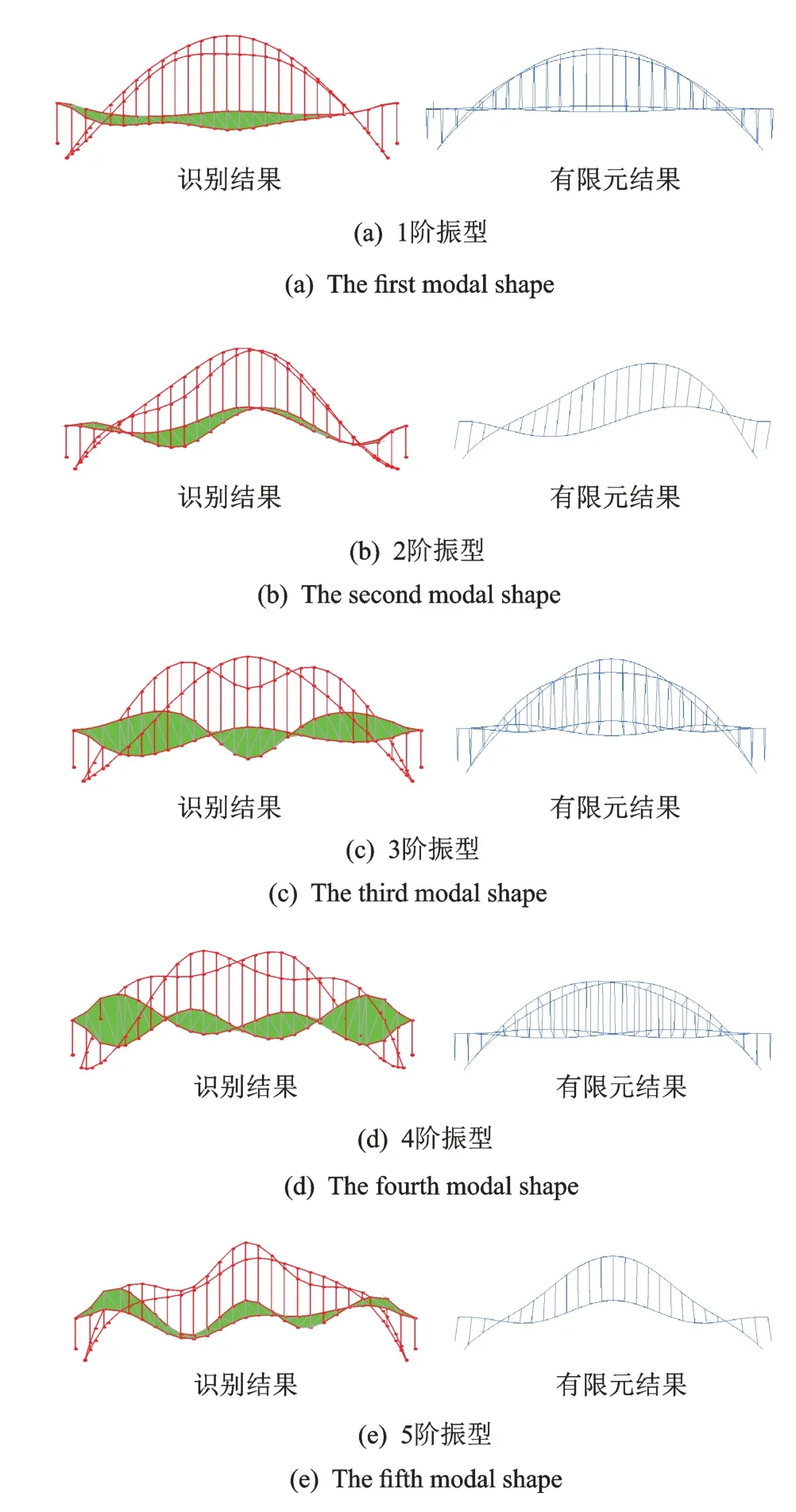
图10 模型识别振型Fig.10 Identified bridge modal shapes
4 结 论
1)改进的FCM 算法不需要任何人工干预,在默认参数下就能自动获得最佳聚类数目,并准确自动识别稳定轴,得到结构模态参数,能够用于桥梁结构模态参数自动识别。
2)提出的数据解析、数据供给和数据分析3 层架构体系可以系统级实现模态参数自动识别。拱桥模型试验分析结果证明,提出的分析架构可以解决实时在线模态参数自动识别的数据实时获取和数据分析等问题,可用于桥梁实时在线桥梁模态参数自动识别。
3)提出的动态可变的滑动数据窗能够保证实时在线模态识别程序稳定运行和识别过程的实时性。动态滑窗的间隔时长应由分析时长和分析时间综合确定,在能得到准确的模态参数的前提下,推荐采用较小的分析时长以实现模态识别较高的连续性,间隔时长设定建议稍大于分析时间。
