盾构纠偏输出控制策略快速自学习方法*
2021-03-03杨宏燕
杨宏燕
(上海隧道工程有限公司,上海 200032)
0 引言
盾构纠偏控制是以隧道设计轴线(DTA)为目标,结合盾构纠偏设定值和盾构姿态测量反馈值,通过调整盾构掘进分区油压输出值,使盾构姿态朝设定值方向变化,从而达到实际隧道轴线尽可能接近DTA的目的。
结合“超大直径泥水平衡盾构施工轴线智能纠偏控制参数整定装置研制与应用”的技术攻关实践,以软土隧道工况、施工工艺和盾构机为背景,以盾构纠偏控制输出环节为重点,具体分析建立的盾构纠偏输出控制策略快速自学习方法和示范工程应用效果。
1 技术现状综述
1.1 人工控制盾构纠偏
目前盾构施工基本采用人工控制纠偏。在新一环掘进开始前,人工根据上一环盾构纠偏实际油压值、盾构姿态变化值和当前盾构姿态值,预估本环结束时盾构姿态目标值。在此基础上根据经验设置新一环的盾构掘进分区油压值。在推进过程中,根据盾构实际姿态和各分区实际油压适当调整个别分区的油压值。
由于盾构纠偏控制输出环节的控制因素复杂,人工凭经验决定当前环纠偏控制输出的策略中往往隐含了新的纠偏扰动因素。实际施工中,人工操作盾构纠偏输出的控制质量具有一定的离散性,掘进过程中的盾构实际姿态相对DTA的震荡周期和幅度取决于施工团队的技术管理水平和盾构司机的经验。
1.2 国内外研究现状
如今,盾构纠偏控制技术正逐步由人工经验朝智能控制技术方向发展。文献[1]结合华北某区间盾构施工实例,总结了人工纠偏经验。文献[2]运用模糊控制理论,结合盾构纠偏控制需求进行具体探索,并用仿真数据验证所述方法的可行性。但盾构纠偏控制因素复杂、纯模糊控制方法产生大量二维关系表,未必能反映盾构纠偏的实际规则。文献[3]在模糊控制理论基础上,根据历史数据推理土质与油压关系,但仿真数据验证方法难以证明其“推理“具有一般的规律性。文献[4]建立按盾构工艺划分的数据库,建立基于大数据分析的自学习功能模块,根据盾构姿态得出当前环纠偏策略,并结合液压执行机构特性和土体稳定综合因素实施盾构纠偏控制。文献[4]是目前盾构智能纠偏控制技术最新进展之一,但未见有关大数据方法适应土质工况特点的应用条件。
1.3 盾构纠偏输出的控制技术瓶颈
在上海北横通道东线盾构施工过程中,第413,414,419,420环的力矩方向变化与盾构方向变化互为相反的纠偏案例表明:盾构纠偏控制输出策略的实际纠偏效果与开挖面土质流动性密切相关。用同类盾构历史数据预估当前纠偏策略应该是有条件的(土质及分布相近)、相对的(条件成立时可能有效)。
隧道勘探测点一般相距十几米,开挖面土质及其分布信息是不连续的。大数据类比法缺少开挖面土质及分布的实际连续数据基础,很难建立纠偏方向与纠偏力矩定量关系。因此,盾构纠偏输出控制的技术瓶颈是开挖面土质及其分布的不确定性。
2 盾构智能纠偏技术
2.1 纠偏控制技术的特点与难点
盾构纠偏控制是多输入多输出控制系统,输入接口包含4个姿态、6个千斤顶行程信息;输出接口包含6个油压信息。纠偏控制是长周期大过程控制系统,调整策略一般0.3环反馈趋势、几环后反馈效果。纠偏控制系统面临开挖面不确定土质分布技术瓶颈。因此,传统控制理论无法建立适用的纠偏控制模型。
2.2 智能纠偏控制系统构架
针对盾构纠偏难点、特点及技术瓶颈,研制的智能纠偏控制系统结构如图1所示。
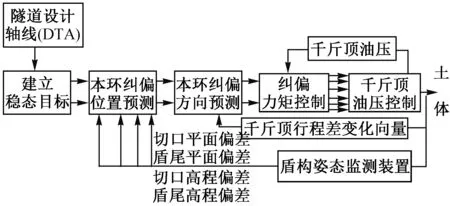
图1 智能纠偏控制系统功能结构
建立稳态目标、本环纠偏位置预测、本环纠偏方向预测是求解控制系统目标设定值环节。“建立稳态目标”模块以适应各类交通隧道设计轴线。“本环纠偏位置预测”模块是本环期望纠偏目标,“本环纠偏方向预测”模块不仅自动实现纠偏参考坐标系转换,而且便于输出控制环节的分步实施目标。纠偏控制输出环节由“纠偏力矩控制”和“千斤顶油压控制”模块组成。
3 纠偏方向与纠偏力矩关系的自学习方法
针对软土隧道盾构开挖面不确定土质及土质分布工况实际,建立纠偏方向与纠偏力矩关系快速自学习方法。
3.1 构建近似动态线性数据文件
以分段函数方法将纠偏方向与纠偏力矩的非线性关系转换为局部区域内近似线性关系。在一环推进过程中,设步数(n)=净行程/步长。步数(n)取整,当n=n+1上升为触发记录条件。设x是盾构方向变化实测值,xn= dζn- dζn-1表示单位控制周期盾构方向角的变化值,其中dζ为盾构方向角。y是控制步的纠偏力矩实测均值。
设计动态线性实测数据存储器,以实现自动跟踪最新纠偏方向与力矩实测数据。采用先进先出数据结构,用于采集和保存最近2环的盾构方向变化(xi)和纠偏力矩(yi)数据。设管片环宽2 000mm,控制步长190mm,则步数为n=1~10,2环数据共20组。一般邻近2环土质分布变化突变概率较小,可视小区域为线性区间,以文件形式读写保存数据。
3.2 建立纠偏方向与力矩快速自学习方法
以最近2环盾构实测数据为数据源:盾构方向变化量xi= dζi- dζi-1、纠偏力矩为yi=fm(fm为实测盾构掘进千斤顶合力距)。小区域动态自学习回归如图2所示。
以最小二乘法原理推导求解纠偏向量的一次系数a0和常数a1:
a1= [n∑(xiyi) -(∑xi∑yi)]/
(1)
a0=(∑yi)/n-a1(∑xi)/n
(2)
y=a0+a1x
(3)
式中:xi,yi是最近20个控制周期采集的盾构方向变化和纠偏力矩实测值(i=1~20,n=20)。式(1),(2)的解代入式(3),由下一控制周期纠偏方向变化值求得纠偏力矩输出值。
4 纠偏力矩与纠偏分区油压关系的自学习方法
4.1 盾构油压分区状况
以示范应用工程上海北横通道盾构为例,推进19组千斤顶设置6个分区油压,6个分区油压范围内各配置1套千斤顶行程仪。其中,盾构底部的D区有4组千斤顶、其他各区3组千斤顶,符合盾构推进高程动态土压梯度工况需求。但是调整B,C,E,F分区油压会影响高程力矩,当人工调整平面力矩时产生的高程力矩耦合会形成新的操作制性扰动。
4.2 盾构实测推力矢量化分解
推进分区油压传感器反馈信息处理:
1) 总推力计算
F=∑nipiS
(4)
式中:ni为第i组千斤顶数量;pi为第i组千斤顶油压;S为千斤顶活塞面积。
2) 力矩计算
My=∑nipiSRcosφi
(5)
Mz=∑nipiSRsinφi
(6)
式中:R为千斤顶分布圆半径;φi为第i组千斤顶对应的圆心角(顺时针方向为正)。
4.3 盾构纠偏力矩与推进油压转换
盾构机第19组千斤顶中部位置为0°,顺时针旋转18.95°是第1组(A区)千斤顶位移传感器中心位置。盾构中心到千斤顶中心距离(半径)7 118mm,千斤顶活塞外径为360mm。
如图3所示,千斤顶分区纵轴位置的对称性,联立千斤顶推力合力和竖向合力矩方程(见图4):
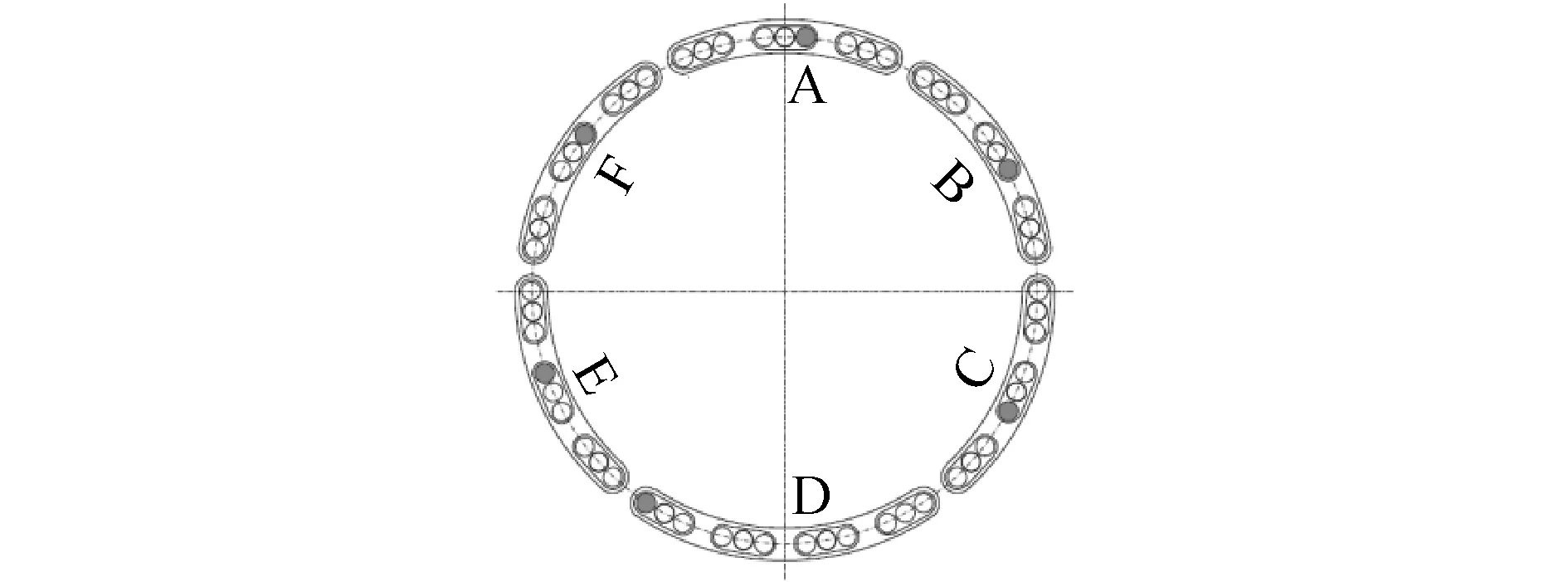
图3 北横盾构机千斤顶位置
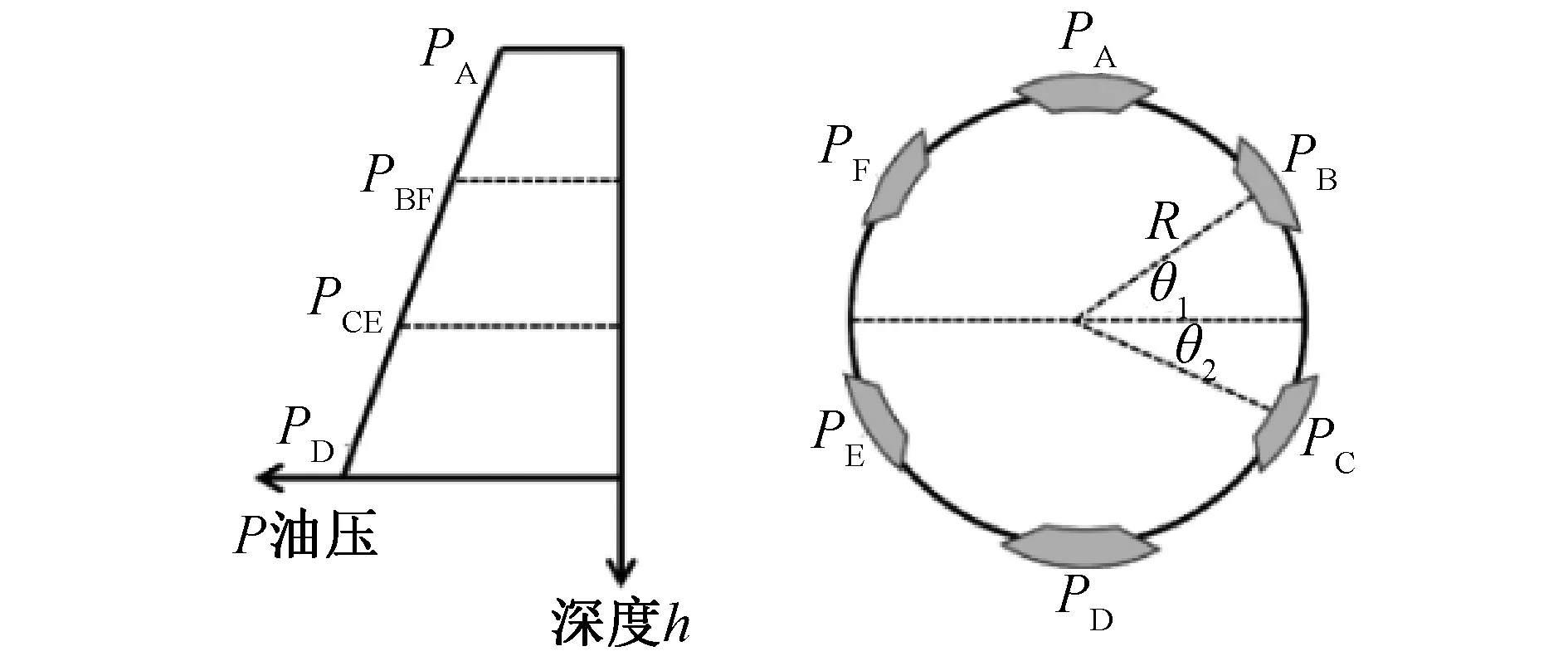
图4 合力及合力矩
合力:
(7)
合力矩:
2×(PBFsinθ1-PCEsinθ2)]RS×3
(8)
式中:PA~PF分别对应A区~F区千斤顶油压(kPa);PBF=(PB+PF)/2;PCE=(PC+PE)/2;S为每组千斤顶(3个)的面积(m2);R为盾构中心到千斤顶中心的距离(m);θ1,θ2分别为B区、C区中心与水平线的夹角(°)。由分区油压成等比关系得:
(9)
(10)
解联立方程(7)~(10),代入θ1=33.16°,θ2=23.68°,R=7.118m,S=0.305m2,即可求得千斤顶油压PA,PBF,PCE和PD的值。再由水平向合力矩列方程解得千斤顶油压PB,PF,PC和PE的值。代入方程可求得下一控制周期的PA~PF分区油压值。
5 工程应用
所建立的盾构纠偏输出控制策略自学习方法是盾构纠偏控制装置的关键技术之一,已在上海北横通道工程东线隧道施工中全程示范应用。
5.1 应用工况
上海北横通道东线全长3 665m,采用直径15 560mm泥水气压平衡盾构施工。隧道沿线为典型冲积层软土地质。381~480环开挖面主要是④层淤泥质黏土、⑤层黏土夹粉砂、⑥层粉质黏土、⑦层粉细砂层、⑧层灰色黏土,土质结构复杂多变。选取东线381~480环平面急转弯特征线形的实测数据分析盾构纠偏输出控制策略自学习方法的应用效果。
5.2 纠偏方向与纠偏力矩转换应用效果
381~407环是R=500mm左曲线形,408~430是左缓和曲线线形,431~456环是右缓和曲线线形,457~480环是R=500mm右曲线形。
根据缓和曲线中的10环(411~420环)实测数据,可以具体反映纠偏方向与纠偏力矩的实际值、设定值的具体应用效果。根据实测数据,盾构方向变量的显示增益为8 000,力矩显示增益为0.008。
定义盾构向右方向的角度增量为正,定义左臂长×推力的力矩为正。每环结束的盾构方向变化实测值(锯齿波)、每环开始时期望的盾构方向变化设定值(方波),总体上呈收敛状态,反映了DTA左缓和曲线的特征。第415环的设定值小于该环结束时的实测值,反映了第415环动态土压的实际工况。第411~412环、第416~420环力矩递增速率大于盾构方向变化递增速率的特点。尤其是第413,414,419,420环的力矩方向变化与盾构方向变化变化互为相反的。上述动态土压突变反馈信息状态,由系统自学习功能自动调节为继承优先、增益为辅的加速算法:yi=ai-1×(xi-1-xi-2)+yi-1。yi-1是上一控制周期的纠偏力矩、(xi-1-xi-2)是上一控制周期盾构方向增量,ai-1是上一控制周期的转换系数,yi是新控制周期的纠偏力矩。
示范应用效果反映所建立的纠偏方向与力矩转换自学习方法能及时响应隧道开挖面土质分布变化的实际工况。
5.3 盾构纠偏力矩与推进油压转换应用效果
根据上海北横通道东线412~420环纠偏力矩与推进油压转换数据记录,平面纠偏以左侧(2区在3区上方)和右侧(6区在5区上方)为主。其基本特征:上部油压小于下方油压。有一侧的油压与力矩变化趋势呈同方向变化,但另一侧的变化趋势与力矩变化趋势呈反方向变化。上下2层之间变化的幅度与高程力矩变化幅度相关。高程纠偏以上部(1区)和下部(4区)为主,高程纠偏底部油压大于上部油压。
由于埋深与压力梯度关系,盾构底部分区的千斤顶个数大于其他分区的千斤顶个数。人工调节平面油压会影响高程力矩。采用盾构纠偏力矩与推进油压自动转换方法可避免人工操作可能产生耦合扰动,具有自动解耦应用效果。
6 结语
盾构纠偏输出控制策略快速自学习方法在上海北横通道中得到了应用,其获得以下成果。
1)突破了盾构开挖面不确定土质分布的共性技术难题 动态数据库为式(1)~(3) 提供分段线性数据的应用条件,可在2环范围内自动适应土质分布变化,具有快速自学习技术性能。
2)抑制了盾构纠偏控制主要扰动因素 式(7)根据当前实际油压计算的总推力作为纠偏新策略的自变量常数,使各分区油压调整前后的总推力保持不变,具有不干涉土压平衡控制系统的技术性能。
3)具有较高的技术创新质量 北横通道东线全程示范应用数据反映:纠偏输出控制策略技术创新点具有明显的实用性和通用性。
