高温气冷堆控制棒圆环链提升装置设计与分析
2021-03-02,,,
,,,
(1.华能山东石岛湾核电有限公司,山东 荣成 264312;2.中核武汉核电运行技术股份有限公司,湖北 武汉 430223)
0 引言
高温气冷堆是以石墨为慢化剂、氦气为冷却剂的高温反应堆,是一种固有安全性好、发电效率高的先进核反应堆[1-3]。在反应堆运行过程中,控制棒系统用以进行反应性控制,实现各种运行模式[4]。圆环链实现控制棒驱动机构与控制棒的连接,控制驱动机构带动圆环链上下运动,从而实现控制棒在堆芯内的上下运动。控制棒驱动机构位于压力容器顶盖上方,共有24组,每4组为1个单元,每个单元包括2组直通式控制棒驱动机构和2组外置式控制棒驱动机构。
在长期运行过程中,因控制棒驱动机构可能会出现故障,故存在对控制棒驱动机构解体维修的需求。在控制棒驱动机构拆卸过程中,由于操作空间狭小,结构干涉可能性较大,且控制棒悬挂长度较长,由此需有专用装置辅助快速处理圆环链,安全可靠地实现控制棒驱动机构与控制棒的快速拆卸分离。在此过程中,应保证控制棒、圆环链、驱动机构及专用装备均与周围结构不产生干涉,且圆环链提升控制棒过程中不能产生较大摆动。当故障严重,无法使用提升装置时,需要剪断圆环链,无法再回收,只能作为最后的处理措施。
本文针对高温气冷堆控制棒驱动系统解体维修处理需求,设计研发了一种圆环链提升装置,使其满足功能性、通用性、安全性和可操作性等各方面要求,并通过ADAMS多体动力学仿真软件,对环链提升过程中圆环链横向振动情况进行模拟。
1 控制棒检修提升装置设计要求
高温气冷堆控制棒驱动机构壳体是一回路压力边界的一部分,一旦拆除驱动机构,就破坏了一回路压力边界,导致原有的氦气气氛被破坏。故控制棒驱动系统解体维修时,首先需要建立气氛隔离系统,然后使用气氛隔离系统中的起吊装置拆除并提升驱动机构,在保证一回路内气氛不外泄的前提下,气氛隔离系统内部固定安装专用的圆环链提升装置,实现控制棒提升,最终进行控制棒与驱动机构之间快速拆卸,完成控制棒驱动机构的解体维修。
当直通式控制棒驱动机构需要检修时,可由环链提升装置配合气氛隔离装置直接将其竖直提升。当外置式控制棒驱动机构需要检修时,由于其上方存在直通式控制棒驱动机构的法兰结构,其竖直提升高度的极限为205 mm,圆环链处理装置需要能在高度为205 mm、宽度为390 mm的狭窄通道内完成所有操作辅助快速提升圆环链。
因此,圆环链处理装置主要用于控制棒驱动机构拆装过程中辅助快速提升圆环链,实现控制棒驱动机构与控制棒的快速拆卸分离,使控制棒驱动机构能够离线维修,避免维修人员长时间面对放射性风险。在有限的空间中,环链处理装置必须满足以下要求:
a.功能要求。在控制棒驱动系统无法正常工作并需解体维修时,圆环链提升装置需具备自主提升圆环链的功能,使控制棒升至高温气冷堆顶盖开孔处。
b.通用要求。圆环链提升装置需满足直通式控制棒驱动机构和外置式控制棒驱动机构2种控制棒解体维修需求,具备通用性。
c.空间要求。控制棒驱动机构布置极其紧凑,尤其是外置式控制棒驱动机构,由于其上方存在直通式控制棒驱动机构的法兰结构,其提升高度受限,故圆环链提升装置设计和操作边界值仅为205 mm,如图1所示。
d.安全要求。控制棒通过504节φ10×30圆环链与控制机构相连,圆环链与控制棒组件质量为262.5 kg,为防止控制棒提升过程中出现动力故障等安全事故,圆环链提升装置需考虑机械自锁。
2 环链提升装置结构组成
圆环链提升装置由运载单元、卷链单元和升降单元3个部分组成。圆环链提升装置整体宽度为380 mm,在工作过程中其长度可达1 107 mm,最大高度为201 mm,整体模型如图2所示。

图2 圆环链提升装置整体模型
2.1 运载单元
运载单元主要由运载平台、锁定机构和导轨组成,如图3所示。导轨固定在气氛隔离装置内部,为运载平台运动提供行走轨道并导向。锁定机构安装在运载平台上,当运载平台到达指定位置时,通过该机构可实现整个装置的固定支撑。运载平台主体呈平板状,其尾部装有2块推板,便于工作人员在气氛隔离装置外部推动小车,其头部装有2块竖板,用于安装直线导轨,使卷链单元可相对运载单元垂直运动。

图3 运载单元模型
2.2 卷链单元
卷链单元通过直线导轨与运载单元连接,由驱动电机+减速器+蜗轮蜗杆+链轮传动链路,实现环链的提升,其中蜗轮蜗杆传动可实现反向运动自锁。由于圆环链的提升是通过链轮与环链间的啮合实现,需保证链轮卷链时不发生跳链,并使圆环链在链轮上具有足够的啮合包角,因此卷链机构上还设有2个辅助压紧轮,如图4所示。

图4 辅助压紧轮示意
压紧轮主要由压紧轮轴及安装在压紧轮轴末端的2个轴承组成,两轴承之间有1个轴套。圆环链卷绕过程,始终与两轴承及轴套所形成的环槽面接触配合,从而防止圆环链横向摆动或跳链。卷链提升初期,由操作人员手动压入左侧压紧轮,该压紧轮设置1个插销锁定机构,可在链轮带动下转动90°,之后锁定机构在预紧弹簧作用下与链轮断开连接,左侧压紧轮不再随链轮转动,此后由操作人员再压入右侧压紧轮,从而保证圆环链在链轮上具有90°以上的转动包角。
2.3 升降单元
当环链提升达到指定长度时,为便于控制棒与圆环链之间拆卸分离后进行插销固定,必须使控制棒的插销孔从高温气冷堆顶盖开孔处露出足够的高度,因此需通过升降单元将卷链单元整体提升。
升降单元主要由丝杠螺母和2条直线导轨组成,其中丝杠螺母安装在卷链机构内部,直线导轨安装在运载单元和卷链单元之间,保证两者相互连接且卷链单元可相对运载单元上下运动。操作人员在气氛隔离装置外部可使用棘轮扳手驱动升降单元丝杠螺母机构,使卷链单元整体提升100 mm,以辅助完成控制棒的插销任务,如图5所示。

图5 辅助压紧轮示意
3 操纵稳定性仿真分析及模拟实验
根据设计需要,为了增加提升链轮和圆环链的包角,环链链轮需抵靠垂直圆环链[5]。在环链链轮和圆环链接触的瞬间,环链链轮会对圆环链产生一定大小的瞬时冲击力,引起圆环链及其悬挂的控制棒横向振动。同时,在圆环链的提升过程中,由于链传动多边形效应,控制棒也会有一定的横向振动。为了避免圆环链及控制棒横向振动振幅过大,在堆芯中发生碰撞,保证控制棒的安全以及环链的顺利提升,需要对圆环链和控制棒的振幅大小和振动规律进行研究。因此,本文通过ADAMS多体动力学软件,对以下2个问题进行模拟研究:
a.圆环链提升装置的卷绕链轮在接触圆环链瞬间,圆环链及其悬挂的控制棒横向振动情况。
b.圆环链在链轮卷绕提升过程中,由于链传动多边形效应,圆环链及其悬挂的控制棒横向振动情况。
3.1 链轮接触瞬间对圆环链横向振动影响仿真
3.1.1 模型建立
分析对象由504节圆环链组成,为了保证仿真结果的可靠性,同时适当减小仿真计算量,本文选择40个圆环链组成的圆环链。在CATIA中建立圆环链仿真模型,并导入ADAMS仿真软件中,默认重力的存在。
3.1.2 参数和边界条件设置
选择ADAMS软件中已有的材料类型“steel”,对每个环链定义材料属性。选择创建圆柱体,其中圆柱体顶端在第40个圆环链的中心上,作为控制棒模型。计算控制棒的质量,以及控制棒相对于第40个圆环链的惯性矩,并将这些参数输入到控制棒的属性中。
圆环链之间的连接处建立空间铰,首先选择相邻2个圆环链实体,再输入相邻2个环链接触点的坐标,作为空间铰所在位置。依次对相邻的2个环链创建空间铰。
空间铰上添加摩擦力,根据钢与钢之间的常见摩擦系数,静摩擦系数设置为0.15,动摩擦系数设置为0.1。
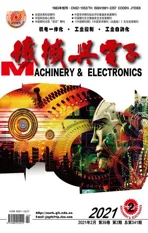
第1个圆环链和地面创建固定副,第40个圆环链和控制棒创建固定副,并对圆环链上端链轮与环链初始接触位置,施加如图6所示横向脉冲力,保守计算,该力大小为100 N。
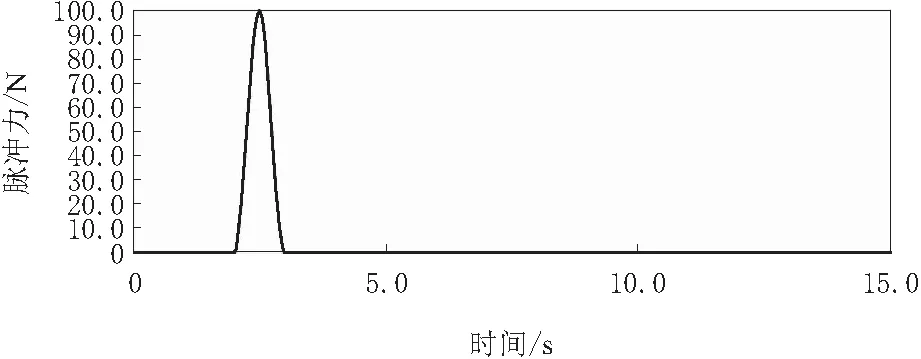
图6 横向脉冲力
3.1.3 计算结果
步长设置为0.01,仿真时间为150 s,进行仿真计算,得出计算结果,分别如图7~图9所示。

图7 控制棒振动位移

图8 圆环链20振动位移
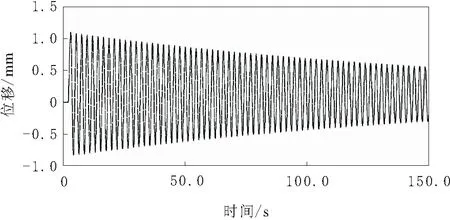
图9 圆环链30振动位移
由仿真结果可知:
a.振动幅度较小。由于控制棒以及总体环链的惯性较大,所以脉冲力引起的振幅较小,振幅在安全范围之内。
b.振动呈衰减趋势。由于摩擦等因素造成了能量的消耗,使控制棒的振动呈现衰减的趋势,与工程实际相符。
3.2 提升过程中环链横向振动仿真
3.2.1 模型建立
链轮卷链提升仿真需要较大的计算量,为了保证仿真结果的可靠性,同时适当减小仿真计算量,此处选择20个圆环链组成的链条。在CATIA中建立链条仿真模型,严格保证各个圆环链之间没有干涉,并导入ADAMS仿真软件中,默认重力的存在。
3.2.2 参数和边界条件设置
在ADAMS仿真软件中,选择ADAMS软件中已有的材料类型“steel”,对链轮和每个圆环链定义材料属性。选择创建圆柱体,其中圆柱体顶端在第20个圆环链的中心上,作为控制棒模型,并在第20个圆环链和控制棒之间创建固定副。将控制棒的质量以及控制棒相对于第20个圆环链的惯性矩输入到控制棒的属性中。
在圆环链同链轮之间创建接触力避免穿透。为了保证仿真计算能简化并稳步进行,只在平链与链轮之间设置接触[6-7],选择接触碰撞模型。在ADAMS软件中,利用step函数提供接触碰撞模型的计算公式为
(1)

最后在环链链轮和地面之间创建转动副,并对链轮添加驱动使其匀速转动。
3.2.3 计算结果
步长设置为0.001,仿真时间为8 s,进行仿真计算,得出计算结果,分别如图10和图11所示。
图10 控制棒振动位移

图11 圆环链12振动位移
由图10和图11可知,由于多边形效应,控制棒和圆环链会产生一定的横向振动,但由于控制棒惯性较大,振动幅度较小,故满足工程要求。
3.3 模拟实验
制造样机进行模拟实验,样机及实验布置如图12所示。实验样机布置在距地面6.0 m高处,通过圆环链对50 kg的重物进行提升,将重物从距提升装置5.5 m处提升4.0 m,提升过程中使用激光测距仪对重物的横向位移进行测量。
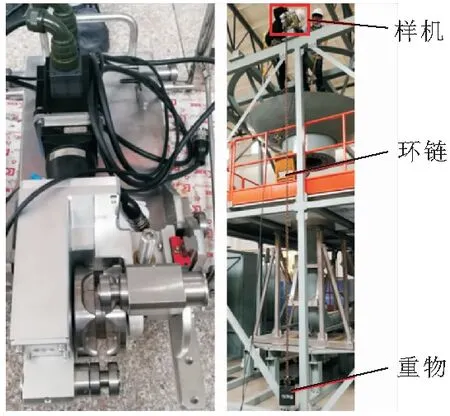
图12 样机及实验布置
实验过程如图13所示。通过激光测距仪测量发现,随着提升装置与重物的距离拉近,重物的横向位移逐渐增大,横向位移的最大值为10 mm。产生该现象的原因主要是随着重物的提升,悬挂部分环链及重物的重心越来越靠近提升装置,受到链轮多边形效应的影响越来越大。通过实验数据与仿真结果对比,发现提升过程中重物横向摆动的规律一致,说明仿真结果的准确性,同时说明提升装置能够安全完成圆环链提升,满足工程实际要求。
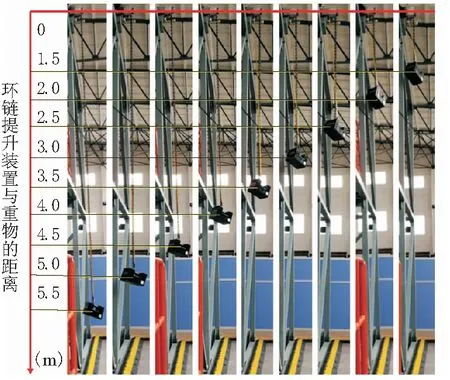
图13 实验过程
4 结束语
对高温气冷堆核电站示范工程的控制棒系统进行了研究,设计了快速处理圆环链的专用装置。圆环链处理装置由运载单元、卷链单元和升降单元3个部分组成,能够安全可靠地实现堆芯内剩余圆环链的提升,无需人员进入氦气氛围,即可快速拆除控制棒驱动机构。
在圆环链的提升过程中,由于环链链轮和圆环链接触以及链传动多边形效应,控制棒也会产生横向振动。对圆环链、控制棒的提升过程做了动力学仿真,对圆环链和控制棒的振幅大小和振动规律进行研究。物理实验和仿真结果表明,控制棒和圆环链的振动幅度较小,满足提升过程中的安全性要求。