新一代运载火箭12点调平控制策略设计及优化
2021-03-01刘丽媛李道平郑国昆李静妍
刘丽媛,邢 然,李道平,郑国昆,李静妍
(北京航天发射技术研究所,北京,100076)
0 引 言
传统的发射平台一般采用4点支撑方式,进行垂直度调整,新一代运载火箭采用12点(以下简称多点)支撑的平台,对平台支撑物的垂直度调整控制提出了更高精度的要求。多点调平的动作状态较为复杂,主要包括:4点同升同降,12点同升同降,4点对角垂调,12点对角垂调。在调平过程中要满足支臂高度、支臂载荷和水平仪监测等多条件约束,增加了控制难度,由于无成熟技术借鉴,需对多点调平控制策略进行研究,寻求多条件的相互协调。
根据需求,调平时跟随精度和载荷控制要求在一定范围内,以保证系统总体的安全性。基于试验需要得到:非线性载荷的变化规律,进行支臂载荷调整时对其它支臂载荷的影响情况,掌握载荷调整控制方法,为研究多点调平的控制方法,进行控制流程的优化提供依据。
本文通过理论分析,并结合试验的具体情况,对多点调平影响因素与控制算法进行了探讨,以实现12点平面下的快速调平闭环控制。
1 理想的调平过程及条件
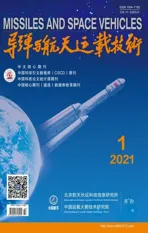
平台的12个支撑点分布示意如图1所示。
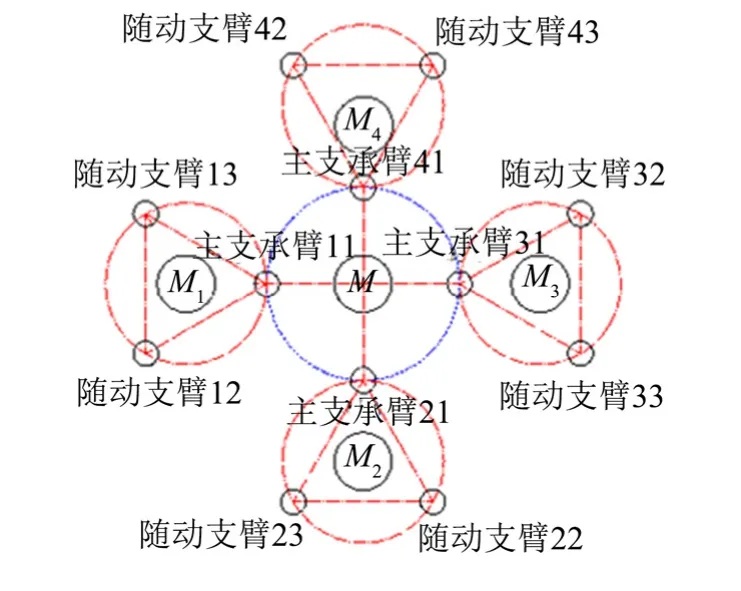
图1 12个支撑点分布示意Fig.1 Distribution Diagram of 12 Support Points
多点调平是希望通过程序的计算控制实现12点1个平面的理想状态。在M、M1、M2、M3、M45个位置分别安装1个水平测量仪,由5个测量数据计算加权平均值,根据加权平均值进行水平面的调整。
12点调平的主要动作包括:4个主支承臂同升同降;12个支臂同升同降;4个主支承臂4点对角升降调平(1个主支承臂上升,同时其对角主支承臂下降,即1升1降);12点支臂升降调平(1个象限内所有支臂上升,同时其对角象限所有支臂下降,即5升5降,各支臂动作过程中保持平台支撑物作平面翻转运动)。最终,希望通过各个动作的调整,使得12点处于同一平面,并在调整过程中满足以下条件:
a)4个主支承臂同升同降时:中间4个主支承臂以I象限主支承臂为基准,在同升过程中其它3个主支承臂与其高度差不超过±0.5 mm,受力接近极限值时暂停,进行载荷调整,载荷调整好后继续按上述要求同升,要求全过程4个主支承臂位移差小于±0.5 mm,否则报警停止。
b)12个支臂同升同降时:要求与4点情况相同。
c)4个主支承臂对角升降时(以Ⅰ、Ⅲ象限对角升降为例):各支臂动作过程中,主支承臂Ⅰ为动作基准,主支承臂Ⅲ与其位移偏差小于±0.5 mm。载荷出现偏差时暂停,进行调整后继续调平。要求全过程4个主支承臂位移差小于±0.5 mm,否则报警,程序停止。
d)12个支臂对角升降时(以Ⅰ、Ⅲ象限对角升降为例),各支臂的支臂速比关系理论位移,如图2所示。

图2 支臂运动理论位移示意Fig.2 Theoretical Displacement Diagram of Arm Motion
以Ⅰ象限主支承臂为基准,Ⅲ象限主支承臂与其进行反向动作。动作规律是远端辅助支承臂速度∶主支承臂速度∶近端辅助支承臂速度=1507.6∶850∶443.2,转换为相应位移比率是远端辅助支承臂位移(h2)∶主支承臂位移(h)∶近端辅助支承臂位移(h1)=1.77∶1∶0.52。过程中,所有随动支承臂位移与基准支承臂位移差不超过±0.5 mm,受力接近极限值时进行载荷调整,载荷调整好后继续运行。要求全过程4个主支承臂位移差小于±0.5 mm,否则报警,程序停止。
外围8个辅助支承臂随动控制要求:Ⅰ象限4个支承臂以各自初始设定的速度进行同降,Ⅲ象限4个支承臂以各自初始设定的速度进行同升。其位移与基准支承臂位移(按比例折算值)差不超过±0.5 mm。升降过程中保证支承臂受力在要求范围内。受力接近极限值时进行载荷调整。
在满足以上控制要求的同时,以水平仪综合水平度显示作为评价标准。可以看出,调平过程状态多样,情况复杂,需要考虑协调多种影响因素,并反馈到控制策略中,实时检测调整控制结果。
2 模型分析
可将图1的12点支撑简化为如图3所示模型。1、2、3、4四点确定的平面中心点为O,实际中的芯级水平仪位置。在调平过程中,如若1、2、3、4四点确定的平面为水平面时,Ⅰ、Ⅱ、Ⅲ、Ⅳ象限的三点平面也为水平面,则12点共处于同一水平面中。

图3 12点支撑简化模型Fig.3 The Simplified Model Diagram of 12 Points Support
这样模型可以拆分为2种简单共面模型:四点支撑调平和三点支撑调平。
a)四点支撑调平。
将由4个独立象限中1、2、3、4四点,也就是各象限主支承臂所在点位确定的平面记为芯级平面,如图4所示。
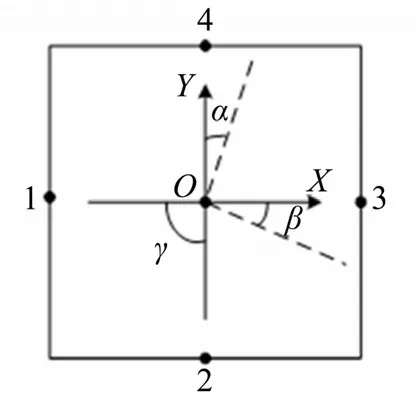
图4 芯级平面模型Fig.4 Core Level Plane Model Diagram
水平传感器沿X、Y方向布置,X、Y两个方向的水平倾角为α和β,两传感器间的夹角为γ,则平台的倾斜角度θ可由α和β合成为[1]

在实际动作中,γ为90°,则公式可简化为
b)三点支撑调平。
将各独立象限中三点确定的平面记为跟随平面,如图5所示。

图5 跟随平面模型Fig.5 The Follow Plane Model Diagram
O点为象限的主支承臂,默认其为基准已根据式(1)模型调整水平,所以在三点支撑模型中无动作。水平面为过O点的调平平面。A、B两点为象限内辅助支承臂,A′、B′为A、B两点在水平面的映射。γ、θ为水平仪所测OAB平面与水平面两垂直方向上的夹角。α、β为∠AOA'、 ∠BOB'。只需得到AA'和BB'的距离,便可得到各支臂的调整位移[2]。
设OA=OB=a,AC=BC=b,如图5所示,则存在如下关系式:

可得:

3 方案分析
对理想的调平过程与要求进行分析可知,在实际的调平过程中,高度值需要实时监测并将情况进行反馈,才能进行下一步动作,力和水平仪作为检测和判别的标准,其规律是需要通过反复试验进行摸索的,将得到的规律加入到控制中有助于进一步的优化,所以提出的方案是以高度作为主要的调平控制对象。
在高度的控制过程中,主要通过对流量的调控,实现对支承臂升降的控制,从而达到对高度的实时监控。在这过程中,主要依据比例积分微分控制(Proportional Integral Derivative,PID)调节原理。
连续时间PID控制系统如图6所示。图中,D(s)为控制器。在PID控制系统中,D(s)完成PID控制规律,称为PID控制器。PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差的时间函数。e(t)=r(t)-y(t)的比例,积分,微分的线性组合,构成控制量u(t),称为PID[3]。

图6 连续时间PID控制系统Fig.6 Continuous time PID Control System
PID整定的理论方法:通过调整PID的3个参数KP、TI、TD,将系统的闭环特征根分布在s域的左半平面的某一特定域内,以保证系统具有足够的稳定裕度并满足给定的性能指标[4]。KP增大,系统响应加快,静差减小,但系统振荡增强,稳定性下降;TI增大,系统超调减小,振荡减弱,但系统静差的消除也随之减慢;TD增大,调节时间减小,快速性增强,系统振荡减弱,稳定性增强,但系统对扰动的抑制能力减弱。常见被控量的PID参数经验选择范围如表1所示。

表1 常见被控制量PID参数经验选择范围Tab.1 Empirical Selection Rang Table for PID Parameters of Common Controlled Quantities
本方案主要对液压的输出流量进行控制。采用试凑法确定PID调节参数:根据经验范围,设定基本的初值,通过模拟或闭环运行观察系统的响应曲线,然后根据各环节参数对系统响应的大致影响,反复凑试参数,以达到满意的响应,从而确定PID参数。反馈误差参量为位移。建立公式模型如下:
标准腿作为基准,将其动作曲线认为是理想曲线;随动腿作为跟随,按照理想曲线调整。计算随动腿和标准腿的变换高度误差,将误差δΔ反馈到随动腿的流量控制中,反复调整得到最佳的输出曲线。
4 试验数据分析
根据第3节的方案分析,结合多点调平样机试验台架进行了模拟试验,试验台架实物分布如图7所示。通过试验来验证方案的正确性,摸索多点调平的综合控制策略,因此,下面对主要的3个影响因素(高度、载荷和水平度)。分别进行分析,综合各个因素的影响程度,得到最终的综合控制原则。

图7 多点调平样机台架试验实物Fig.7 Physical Drawing of Multi-point Leveling Prototype Bench Test
4.1 控制精度
试验中,分别对4点同升同降、4点对角升降、12点同升同降、12点对角升降4种工作状态进行模拟试验。考虑到控制的输出量,将KP初步设定为2,TI结合试验中其对控制效果影响较小的实际情况,将其取为0。KP根据各随动腿的距离比例分别进行设定。依照阀件特性,以输出电流12 mA为中心零位,即液压系统为0 L/min,动作死区范围为[11mA,13mA],默认无动作。电流值大于13 mA时支臂升;电流值小于11 mA时支臂降。
下面以加载10 t时12支臂对角2降4升试验数据为例,进行分析讨论。在该种工况下,载荷的均匀分布情况为主支承臂1176 N,辅助支承臂735 N。载荷超差范围控制在各支承臂均匀承载情况下的50%。
a)方案初期,根据经验值范围选定系数KP为2,高度偏差、输出流量变化曲线如图8、图9所示。

图8 高度偏差Fig.8 Height Deviation Chart

图9 输出流量Fig.9 Output Flow Curve
b)当内圈四主支承臂KP为1,外圈的四辅助支承臂KP为2时,根据前期的试验数据结果,调整参数KP的大小。高度偏差、输出流量变化如图10、11所示。
对比图8、图9与图10、图11两组数据曲线可以看出,试验前期将所有支臂的KP系数均设定为2时,PID的调节幅度较大,调节频率较频繁,并伴有某些支臂出现了反向穿越的情况;根据前期的数据结果,将在不同工况下的相对内侧4个主支承臂的系数KP减小时,PID的调节幅度减小,频度适中,消除了大部分的反向穿越现象,使得PID的调整效果更佳。
4.2 载荷规律
对单个支臂进行升降动作,以观察分析单支臂动作对其他支臂的载荷产生的影响规律。
a)主支臂动作时(主支臂动作先后顺序:3、4、2、1),载荷变化如图12、图13所示。
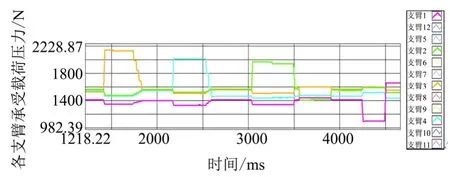
图12 各主支臂载荷变化Fig.12 Load Variation Curve of Each Arm

图13 各随动支臂载荷变化Fig.13 Load Variation Curve of Each Arm
b)随动支臂动作时(动作支臂与先后动作顺序:5、7、9、11),载荷变化如图14所示。
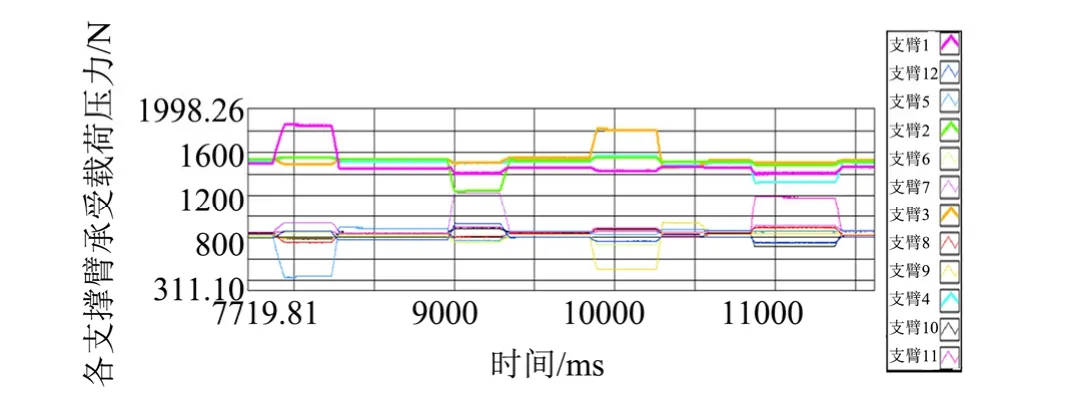
图14 各支臂载荷变化Fig.14 Load Variation Curve of Each Arm
通过数据曲线图,不难发现,单个支臂动作调整载荷时,有以下规律:
a)当动作支臂为主支承臂时,主要影响的首先是本象限内的2个辅助支承臂,其次是两侧象限的辅助支承臂,然后是对角象限的主支承臂,且这些受到影响的支臂载荷变化是与动作支臂呈现相反的趋势。
b)当动作支臂为辅助支承臂时,其主要影响的是本象限内的主支承臂,且这些受到影响的支臂载荷变化是与动作支臂呈现相反的趋势。
4.3 水平度
试验过程中,当将平台依据水平仪显示调平后,再对单支臂做微小的载荷调整时,对综合水平度的影响较小,在5″范围之内。
4.4 控制策略总结
综合上述分析,可以得到多点支撑下,垂直度调整的控制策略如下:
考虑到水平度在调平后,单支臂微小动作对其影响较小,在控制中以高度误差值作为基本的控制反馈参数,兼顾载荷情况。在调平动作过程中,检测载荷情况,设置报警程序,当载荷出现超差时,发出报警信号并暂停动作进行载荷调整;在调平过程中若载荷未出现超差报警,则直到动作结束后,再进行单支臂的载荷调整。但根据试验显示,在动作过程中,载荷基本在控制范围内变化,满足控制要求。
5 结束语
本文依据需求以高度作为调整控制对象,提出调平控制算法,试验证明该算法能实时的调整控制支承臂动作速度,将误差控制在要求范围之内。方案能满足设计要求,实现高精度闭环调平控制功能。本文基于设计方案的试验结果,对多点调平下的多影响因素间相互协调,做了初步探讨,总结了多影响因素下的控制策略及优先程度。本试验是基于模拟台架进行的,较于实际工程应用钢性较强,在实际产品应用中效果会较试验有所提高,试验结果具有较强的工程应用性。