基于小生境粒子群算法的永磁同步电机参数辨识
2021-02-28林荣文
陶 涛,林荣文
(福州大学 电气工程与自动化学院,福州 350108)
0 引 言
永磁同步电机(以下简称PMSM)具有结构简单、效率高、功率密度大、质量轻和调速范围宽等优点,被广泛应用于新能源汽车、工业机器人等新兴领域,对其控制系统的性能要求也越来越高。近年来,许多先进的控制技术被提出,使得PMSM获得了更好的动态响应和控制效果,但这些控制策略大多是建立在PMSM准确的参数基础上的,所以实时掌握电机参数变得尤为重要。
PMSM的参数会随着电机运行工况的变化而发生改变。例如,由于电机机械磨损、散热不佳等原因造成的电机温度上升,会引起电机定子电阻的变化,降低电机运行的效率,过高的温度还会使得转子磁链减小,甚至导致转子永久性失磁,造成电机永久性的损坏。同时,电机电感参数也会受到电机温升、磁路饱和的影响。为了实时获取电机运行时参数的变化情况,采用矢量控制、直接转矩控制、弱磁控制等能达到预期的效果,国内外学者提出了一些电机参数实时辨识方法,这些方法虽然正确可行,但仍然有各自的缺陷。文献[1-2]中,将电机电压方程和磁链方程设计成辨识模型,将最小二乘法作为其辨识方法,通过数据迭代,最终估计出电机参数,但最小二乘法随着数据的增加会出现饱和现象,为参数辨识带来误差。为了克服这一问题,文献[3]提出了一种带遗忘因子的最小二乘法,削弱了老数据的影响,增强了新数据对估计值的修正作用,避免了数据饱和,但数据的变化又给辨识系统带来了失稳的问题。文献[4]采用模型参考自适应法对电机参数进行估计,获得了较好的收敛效果,但模型参考自适应法的收敛速度较慢,并且估计参数变多时,自适应率的选取也变得十分复杂,不具备很好的通用性。文献[5-6]提出将扩展卡尔曼滤波器应用在电机参数辨识中,扩展卡尔曼滤波器是将电机非线性状态方程近似线性化处理后,用卡尔曼滤波器线性最优估计的理论来辨识电机参数的方法,可以同时获取电机的参数和运行状态,但扩展卡尔曼滤波器本身存在算法复杂、计算量大、易受噪声影响等问题。
针对以上参数辨识算法存在的缺陷,研究人员提出将智能算法运用到电机参数辨识中,取得了一些可观的成果。文献[7]提出一种基于遗传算法的参数辨识方法,利用遗传算法较好的全局寻优能力和鲁棒性,对电机参数进行了准确辨识。本文在这一思想指导下,将粒子群算法运用在电机参数辨识中,利用粒子群算法较快的收敛速度,克服了遗传算法收敛慢的问题;同时引入小生境技术和改进粒子群策略,克服了粒子群算法容易陷入局部最优的缺陷,获得了较好的辨识效果。
1 表面式PMSM数学模型
PMSM按结构可分为凸极式和隐极式两大类,其中隐极式PMSM也称为表面式PMSM(以下简称SPMSM),其因为结构设计简单,在中小功率场合广泛应用。图1为SPMSM的简化结构图。
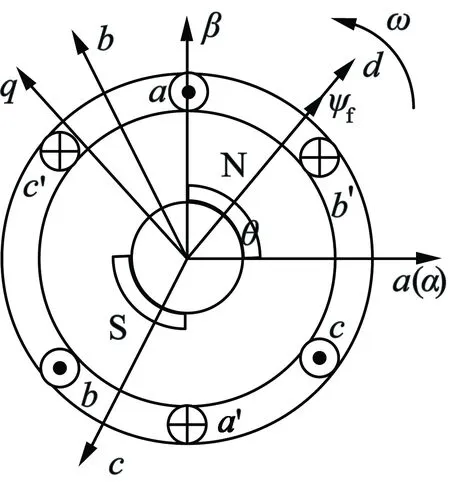
图1 SPMSM结构图
将d,q坐标轴固定在转子磁链上后,PMSM的电压平衡方程:
(1)
内部磁链方程:
(2)
式中:ud,uq为d,q坐标下定子电压分量;id,iq为d,q坐标下定子电流分量;Rs为定子绕组电阻;ψd,ψq为d,q坐标下定子磁链分量;ωr为转子电角速度;Ld,Lq为d,q轴等效电感;ψf为转子磁链。
SPMSM中Ld=Lq=L,由此将式(2)代入式(1)可得:
(3)
将式(3)进行帕德逼近并离散化[8]得:
id(k)=θ1id(k-1)+θ2[ωr(k)iq(k)+
ωr(k-1)iq(k-1)]+
θ3[ud(k)+ud(k-1)]
(4)
iq(k)=θ1iq(k-1)-θ2[ωr(k)id(k)+
ωr(k-1)id(k-1)]+
θ3[uq(k)+uq(k-1)]+
θ4[ωr(k)+ωr(k+1)]
(5)
式中:
(6)
式中:Ts为采样周期。至此,SPMSM定子电流离散状态方程已定。
2 小生境粒子群算法在参数辨识中的实现
2.1 粒子群算法[9]
标准粒子群算法(以下简称PSO)是由社会心理学博士Eberhart和电子工程学博士Kennedy在1995年提出的,是一种源自于鸟类捕食行为的群体智能算法。PSO是一种迭代寻优的随机进化算法,通过人为构造的适应度函数来评价粒子当前所携带信息的品质,并不断趋势粒子向着更高品质位置移动,最终达到最佳解。PSO相比遗传算法,没有复杂的变异交叉操作,算法简单,收敛速度快,在大多数领域得到了广泛运用。
在PSO的迭代过程中,总共的粒子数为m,每个粒子都是D维空间向量,代表需要寻优的D个参数。以粒子i为例,每一维又包含寻优参数的位置信息xid和速度信息vid,每个粒子迭代过程中还会产生个体极值Pbestid,代表着粒子i的历史飞行经验,所有粒子在每一代会产生一个群体极值Gbestd代表整个粒子群的共有飞行经验。在每次迭代更新时,粒子的各维信息都会受到粒子的当前位置、当前速度、个体极值和群体极值的影响,具体更新公式如下:

(7)
(8)
式中:w为惯性权重;c1,c2为加速常数;rand1,rand2为0到1之间的随机数。
个体极值与群体极值随着迭代的进行也会发生改变,其更新公式如下:
(9)
(10)
式中:fit为适应度函数。
2.2 PSO初始种群的改进策略
标准PSO算法的初始种群是随机选取的,常常存在分布不均匀的问题,使得算法可能在小山峰上收敛,完全避开了全局最优值所在山峰。本文初始种群采用拉丁超立方体采样(以下简称LHS)[10]产生,使得粒子在寻优范围内充分填充,LHS的操作步骤如下:
a) 确定粒子所带信息的维度D;
b) 确定种群的规模m;
c) 将粒子每一维参数所在区间平均划分为m等分,产生m个小超立方体;
d) 结合粒子维度可以产生一个D×m的矩阵,将矩阵每一行数据按行方向随机排列,获得一个新的矩阵;
e) 将新矩阵每一列数据赋值给粒子,得到一个规模为m的粒子群。
通过LHS采样产生的初始种群,在多维空间中分布均匀,可以避免算法早熟。
2.3 惯性权重的改进[10]
惯性权重w是PSO的重要参数,合理的惯性权重可以有效地平衡算法的全局搜索能力和局部搜索能力。为了获得更好地寻优效果,通常设计的w是动态变化的。目前,大多数的w动态变化策略是线性的,这种方法面对复杂寻优问题时有较大的局限性。本文将逻辑斯谛函数(sigmoid函数)的变化曲线设计成w变化函数的基函数,可以较好地满足w的动态变化要求。sigmoid函数如下:
(11)
函数图象如图2所示。
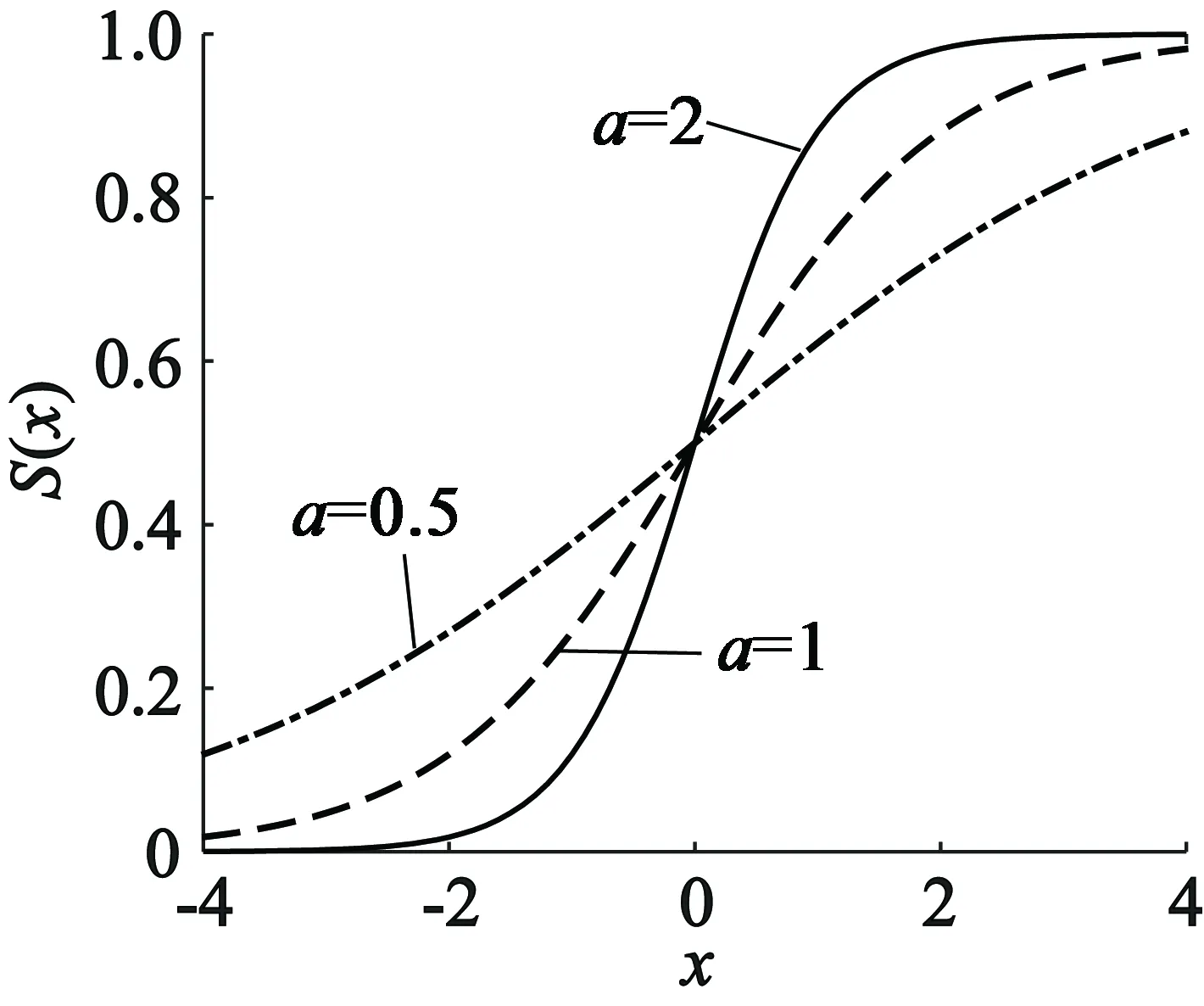
图2 sigmoid函数图
由图2可知,通过改变a的值,可以改变函数前后两端值的变化速度,且函数在前端和后端的曲线斜率要比中间小.通过这种形状设计的w可以满足算法在初期有较强的全局搜索能力和在后期有较强的局部搜索能力的要求。由此将w的变化曲线设为如下:
(12)
式中:wmin为w的最小值;wmax为w的最大值;s为sigmoid函数区间长度;n为迭代总次数。
在算法后期,由于全局搜索能力被弱化,数据出现聚拢现象,容易陷入局部最优解,为了使PSO保持一定的全局搜索能力,可将小生境技术引入PSO中。
2.4 小生境PSO
在进化论中,小生境概念主要指生物生存的周边环境,不同种生物的生存环境和领地大小都是不同的,这体现了物以类聚、人以群分的思想。在面对多模优化问题时,小生境技术可以维持种群的差异程度,获得较好的群体分布特性。
小生境PSO主要分为两个过程。第一步是粒子小生境群体的划分和PSO的运作,小生境技术通过粒子间的距离来划分每个粒子所处的小生境群体,然后在每个群体内使用PSO更新粒子的速度位置信息,其中,每个群体都有自己的最优粒子,并且只在本群体内起作用。第二步是每个粒子适应度值的更新,区别于传统粒子群只决定于目标函数的适应度值,小生境群体中的粒子适应度值会根据粒子间的距离和共享函数进行更新,并通过更新后的适应度确定个体极值和群体极值。
1) 小生境的划分
小生境技术通过粒子间的海明距离划分小生境群体,划分规则如下:
(13)
i=1,2,…,H-1;j=i,i+1,…,H
对于给定的常数σ,如果粒子间距离dij<σ,则将该粒子划入该小生境范围内。
2) 适应度共享函数机制
共享函数是小生境群体中粒子间联系密切程度的反映,粒子间的联系越密切,共享度越大;群体中的粒子个数越多,粒子的共享度也越大,较大的共享函数会降低粒子的适应度,由此鼓励粒子分布在多模问题的多个峰值上,避免局部最优。共享函数如下:
(14)
根据共享机制更新粒子适应度函数,规则如下:
(15)
式中:fiti为粒子的原始适应度;p为小生境内粒子个数。
2.5 参数辨识的实现
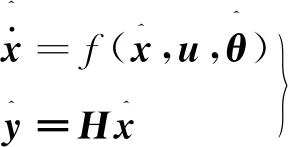
非线性系统的数学模型可以写成如下状态方程的形式:

(16)
式中:x为状态矢量;u为输入矢量;θ为参数矢量;H为常数矩阵;y为输出矢量。若令θ等于估计值 ,则式(16)的可调模型:
(17)


(18)
若式(18)在系统每一个时刻等于0,则系统可调模型就等于参考模型,那么系统参数辨识问题就可以转化为通过算法求取使得误差函数取得最小值的参数寻优问题。
按照这一思想,可将式(4)、式(5)SPMSM的离散状态方程设计成电机参考模型,则SPMSM的可调模型如下:
ωr(k-1)iq(k-1)]+
(19)
ωr(k-1)id(k-1)]+
(20)

由于电机模型是离散的,所以考虑将输出状态矢量各个采样点上的误差绝对值的和作为参考模型和可调模型匹配度的标准,则适应度函数设计成如下:
(21)
式中:N为采样点数。
采用小生境PSO(以下简称NPSO)辨识电机参数的过程可概述如下:首先运行SPMSM伺服控制系统,并对电机d轴定子电压、d轴定子电流、q轴定子电压、q轴定子电流、电机转速这5个参数进行采样,采样数为N;然后在每一个采样点上,通过式(19)、式(20)对定子d轴和q轴电流进行估计,并计算定子电流估算值与真实值的误差绝对值之和;最后通过NPSO算法不断搜索改变Rs,L,ψf值,若使得误差和最小,则认为对3个参数进行了正确估计,辨识原理图如图3所示。

图3 辨识原理图
3 仿真分析
在MATLAB/Simulink环境中搭建SPMSM双闭环矢量控制系统,其结构如图4所示。
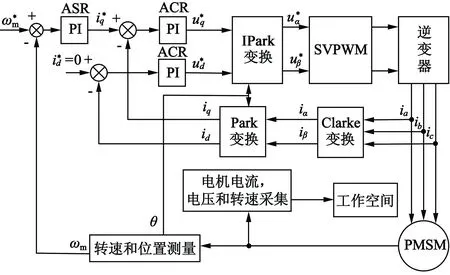
图4 SPMSM矢量控制结构
矢量控制采用id=0的控制策略[11],id=0使得直轴上不存在增磁或消磁作用,采用这种控制策略的PMSM有较宽的调速区间和稳定的转矩,被广泛应用于各种高精度控制场合。电机运行工况:参考转速1 500 r/min,负载转矩4 N·m,电机定子电阻0.958 5 Ω,定子电感0.005 25 H,转子磁链0.182 7 Wb,极对数4,转动惯量0.000 632 9 kg·m2。
在系统运行过程中,以固定的频率对电机的交直轴定子电压、定子电流和电机转速进行采样,并将数据保存在MATLAB的工作空间中,在MATLAB中根据采集到的数据通过NPSO对参数迭代估计,最终确定参数辨识值,算法参数如表1所示。

表1 NPSO参数
每次迭代全局最优粒子的适应度函数及对应的电阻、电感和磁链值的变化情况分别如图5~图8所示。由图5~图8可知,PSO辨识在22代左右才收敛稳定,而NPSO在12代附近已经收敛到稳定值,相比之下,NPSO有更快的收敛速度,且NPSO的适应度函数稳定值小于PSO,说明NPSO找到的解优于PSO。

图5 适应度函数变化
表2为3个待辨识参数的真实值和通过两种算法辨识得到的值的比较。由表2可知,NPSO的辨识误差普遍较小,说明了算法有跳出局部最优的能力,有更高的辨识精度。

表2 辨识结果比较
4 结 语
本文在分析PMSM的离散电流方程后,采用一种基于PSO的电机参数辨识方法,可以同时对电机电阻、电感和磁链进行辨识。又引入粒子群改进策略和小生境技术,获得了更快的辨识速度和更高的辨识精度。仿真结果验证了该策略的可行性和准确性。
