基于MSC的五相感应电机缺两相容错控制
2021-02-28周银萍赵镜红程海军马远征
周银萍,赵镜红,程海军,马远征
(海军工程大学 电气工程学院,武汉 430033)
0 引 言
大容量感应电机因其结构简单,维护方便,易于控制等优点得到了广泛的应用[1-2],作为舰船动力系统重要一环,对其稳定性要求很高[3]。在舰船正常行驶过程中一旦发生不可逆转的重大故障,要能够自我修复或调节,以保证系统正常运行,保障舰船能够在海上正常行驶和保护航海人员的安全。为此,多相感应电机的高可靠性、高容错率已成为国内外研究的热点课题。目前,多相感应电机最常见的故障方式就是功率变换电路故障[4-7],即功率管断路故障或功率管直通故障,断路故障又分为一相断路和两相断路故障[8]。国内外关于功率管一相断路的研究已经很成熟了,但是功率管断两相的研究还有待加强[9-11]。
文献[12]在五相永磁同步电机发生两相开路故障时,提出一种矢量脉宽调制技术来保证电机在开路故障下高品质运行,但是此方法用于感应电机容错控制,计算量较大,不易实现;文献[13-14]基于电机正常运行时磁势为恒定圆形的容错控制调节,以多相感应电机缺相后磁动势平衡为容错控制策略,对集中整距绕组的五相电机进行容错控制,约束磁动势不变,使五相感应电机能够保证在缺相状态下保持正常运行,但磁动势不变时电机转矩就得不到相应保证,对于有高工作需求的电机来说无法实现;文献[15-17]将多相感应电机等效为多相等效电路,基于该等效电路对缺相系统进行容错控制,但是未考虑电机缺多相运行的情况;文献[18]以效率优化和铜损最小化为前提,提出一种全转矩范围效率优化容错控制策略,但该方法在控制效率和铜耗方面有一定的局限性;文献[19]提出一种双平面同步旋转变换的间接矢量控制方法,通过控制五相感应电机的气隙磁场来达到容错目的,但是该方法采用的电流滞环控制会产生开关频率不稳定,电流波动大等问题。
本文以五相感应电机为主要研究对象,提出了一种以转矩脉动最小为前提,应用对称分量法(以下简称MSC)对五相感应电机缺两相运行系统进行容错控制的方法,以提高五相感应电机在断路故障时的稳定性。通过约束转矩脉动最小,控制剩余各相电流的幅值和相位来实现控制五相感应电机正常运行,并在容错控制时采用空间矢量脉宽调制(SVPWM)技术,减少原始电流滞环控制所带来的问题。对该容错方法进行仿真分析,得到了容错控制后各相电流合成磁势为圆形,且转矩脉动最小化,验证MSC应用于五相感应电机容错控制的可靠性。
1 基于MSC的五相感应电机缺相分析
1.1 基于MSC的五相感应电机缺相模型
电力系统的正常运行一般是对称的,对于健康的情况,五相电机可以象三相电机一样处理,其中基本序列是唯一的功能序列。为此,五相系统通常基于具有多个子空间的传统d,q模型来建模。对于这种建模技术,通常假设只考虑两个子空间(基波和三次谐波磁通分量)的主空间谐波,且这两个子空间相互正交,相绕组沿定子周边对称分布(饱和度、滞后和趋肤效应被忽略)。根据MSC原理和五相感应电机等效电路图,五相系统在基波条件下的电流可变换出五个对称分量。因此,通过求解一组同步电流方程来确定相应的绕组电流,然后计算其他电机变量是本文研究的主要问题。此时,利用MSC将发生缺相故障的五相电机系统分解为4个序分量和1个零序分量并进行各对称序分量之间的电路计算。
本文只研究了MSC下五相感应电机基波状态下缺两相的情况,此时令a=e-2πj/5,可得五相感应电机基波下的MSC变换模型:
(1)
式中:I11~I14为基本子空间的四个电流序分量;I10为零序分量。
根据瞬态对称分量法[17],可以列出非正弦供电时的五相电机缺相后不对称系统的基本子空间瞬时转矩:
Te(t)=Tem(t)+ΔTe14(t)+ΔTe32(t)
(2)
式中:
(3)
式中:Tem(t)为基波子空间平均转矩; ΔTe14(t)和ΔTe32(t)为基波子空间转矩脉动。
因为两个子空间的电流分量具有相同的频率,所以基波下由两个子空间引起的总转矩脉动幅度:
(4)
1.2 基于MSC的容错控制约束条件
五相感应电机有5个对称分量,其中包括有4个电流序分量和1个零序电流分量。在没有谐波电流注入的情况下,星型连接的五相感应电机中性点隔离,零序电流分量为零。由于定子绕组开路后,基波电流产生的磁动势不再为零,使得无效磁动势大量增加,所以本文以容错电流为主要研究对象,设定各相容错电流不能超过额定值,总铜损最小原则以及转矩脉动最小原则为约束条件,同时求出最优解。即需要满足如下条件1:
Intol≤Inrated
(5)
式中:Intol为容错电流;Inrated为额定电流。
电机在基波供电状态下除零序电流分量外的4个电流序分量分别为I11~I14,当电机正常运行时只有基波磁动势I11不为零,但是当五相感应电机发生缺相故障时,I11~I14均不为零,而为了方便分析,且使电机能够在缺相状态下也能达到最佳状态,一般令转矩脉动最小,基于MSC下的电机转矩由4个电流序分量组成,其中脉动转矩由两部分构成ΔTe14和ΔTe32,而转矩脉动ΔTe14的系数是ΔTe32系数的3倍,所以要使转矩脉动最小,就要令ΔTe14=0。为了方便分析五相电机缺相故障时的容错电流,使得转矩脉动最小,磁动势不变,可得各相电流序分量约束条件2:
(6)
2 基于MSC的五相感应电机容错控制
2.1 基于MSC的五相感应电机缺A,B相容错控制
五相感应电机缺两相运行可以有两种情况:一种是相邻两相断路;另一种是不相邻两相断路。首先分析相邻两相断路的情况,假设A,B两相断路,那么A,B两相相电流就为零,即IA=IB=0。根据MSC确定各序分量之间的关系,可知缺A,B相时五相感应电机的各相电流脉动转矩分量表达式:
(7)
进行容错控制时,在磁动势不变的情况下,当转矩脉动最小时,就有I14=0,I11依旧保持不变,根据反变换原则,可以得到容错控制时各序分量关系:
(8)
(9)
计算得到的五相感应电机缺A,B两相运行的容错电流如下:
(10)
2.2基于MSC的五相感应电机缺A,C相容错控制
当五相系统缺A,C两相时,有IA=IC=0,就有反变换约束条件如下:
(11)
同理,I11保持不变,I14=0,得到:
(12)
(13)
解得二、三序分量容错后电流方程如下:
(14)
2.3 容错控制实现方式
电机缺相运行时,与正常运行时的方程基本相同,控制方式也与正常运行时保持一致,只是在正常运行的基础上加入容错环节,使原本矢量控制的5/2变换变为3/2变换。为了减少开关频率大、电流不稳定等问题,本文将原始的电流滞环控制改为SVPWM控制,并重新计算相关电感参数即可。容错控制框图如图1所示。
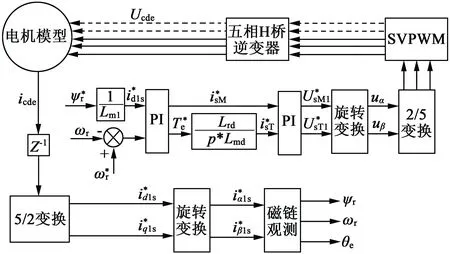
图1 基于MSC的五相感应电机容错控制框图
3 仿真及分析
根据图1的容错控制框图,下面验证理论分析的正确性,电机模型的参数如表1所示。

表1 五相感应电机参数
为了验证理论分析,将计算得出的容错电流代入仿真进行验证,得到五相感应电机缺A,B相运行时的缺相电流和容错电流以及缺相时的电流合成磁势对比图如图2~图4所示。

图2 五相感应电机缺A,B相电流
从图4可以看出,五相感应电机缺A,B两相未进行容错时,定子相电流不对称,且各相电流均明显增大,d,q轴电流合成磁势轨迹畸变为向左倾斜的椭圆形。而从图3容错后的电流波形可以看出,采用MSC计算得到的电机缺A,B相运行时容错电流对系统重新进行控制,容错电流将缺相后变换到d,q轴的电流合成磁势轨迹由椭圆重新调整为圆形,产生基波正转圆形磁场,有效地抑制了转矩脉动,使电机缺相时不产生振动和过大的噪声,按照原工作内容继续平稳运行。
五相感应电机缺A,C相运行时的缺相电流和容错电流以及缺相前后电流合成磁势对比图如图5~图7所示。
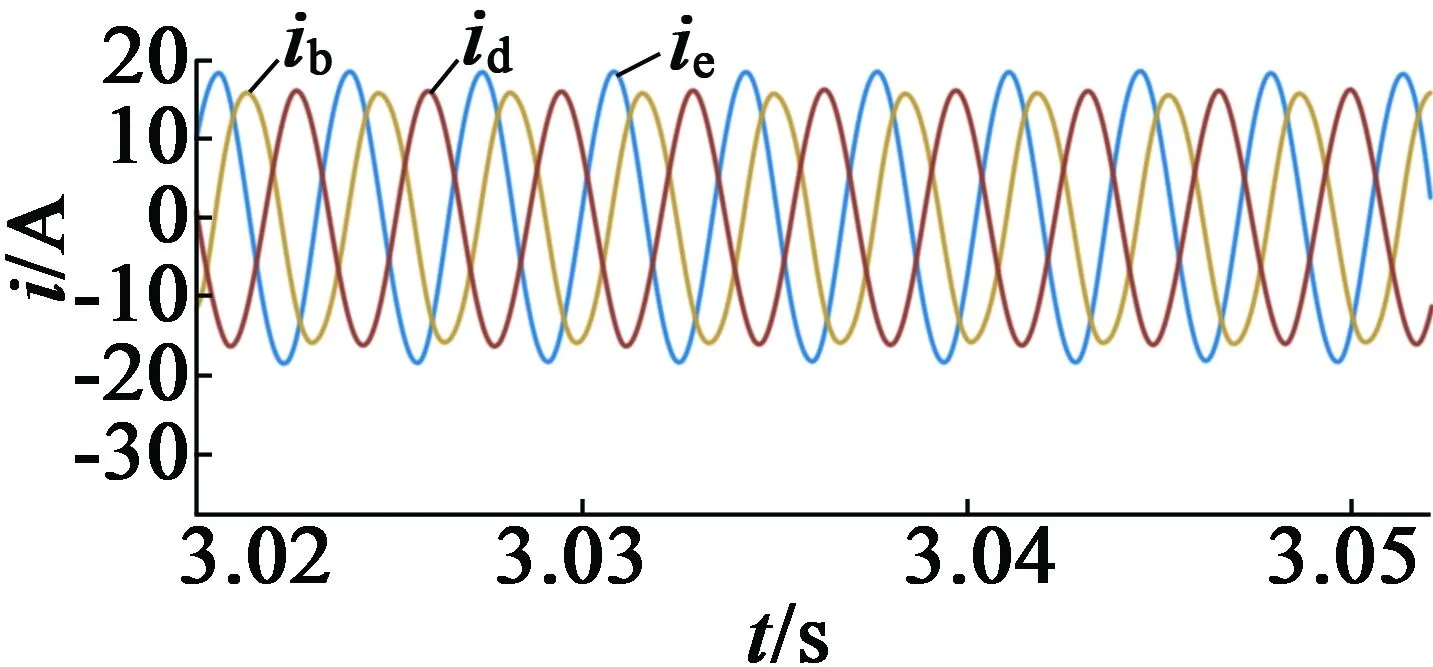
图5 五相感应电机缺AC相电流
电机缺A,C相容错运行时,各相电流畸变严重,电流谐波含量很高,电流合成磁势也畸变为向右倾斜的椭圆。图5和图6是对其进行容错调节前后的波形,从图6中可以看出,电流畸变明显减少。而从图7各相电流合成磁势对比图也可以看出,电机合成磁势恢复为正常运行时的圆形,以维持电机正常运行。
电机缺相运行时的转矩脉动和容错后的转矩如图8和图9所示。
从图8中的电机缺相运行时的转矩脉动可以看出,此时电机运行不稳,会产生很大的噪声和振动,而采用容错控制后,可使得输出转矩脉动明显减小,电机平稳运行。

图8 五相感应电机缺两相运行时的转矩脉动
该仿真结果与本文理论分析结果一致,对比五相感应电机缺两相运行的两种情况可知,在转矩脉动最小的情况下,利用MSC法可以得到最优的容错控制方法,使电机继续平稳运行。
4 结 语
本文对五相感应电机缺相邻两相和不相邻两相运行的容错控制策略进行了分析,结论如下:
1) 通过MSC来分析出各序分量电流、电压和转矩之间的关系,得到在约束条件下五相系统缺两相运行应满足的条件,并以此为前提进行推导计算;
2) 提出了基于MSC下的五相系统在基波情况下分解为电流序分量,并对五相系统缺相邻两相或不相邻两相两种情况的缺相运行进行容错控制,并以转矩脉动最小为前提,得到最优控制电流的方法。仿真结果表明,采用本文的容错控制方法,大大减少了五相系统缺两相后的转矩脉动,使电机仍能继续平稳运行。
