多点定位系统脉冲到达时间测量技术研究∗
2021-02-26
(四川九洲空管科技有限责任公司 绵阳 621000)
1 引言
机场场面多点定位系统是近年来随着民航业的发展新兴的一种机场场面监视系统,既能解决传统雷达监视系统覆盖范围有限的问题,又能弥补ADS-B(Automatic Dependent Surveillance-Broad⁃cast)系统定位失效的问题。与传统的二次雷达相比,多点定位技术具有以下优势:采购安装运行成本低、无盲区、数据更新率高、可靠性好、不需要旋转机械部件、能与ADS-B兼容、单个传感器失效不会给覆盖区域或系统精度带来很大影响、系统维护时仍能不间断提供定位服务[1]。
MLAT是一种基于脉冲到达时间差(TDOA)的定位系统,它由基站接收并且处理1090MHz的A/C模式和S模式应答信号,测量脉冲到达时间(TOA),并且将其送给目标处理单元,目标处理单元负责汇算几个基站的测量时间作差解算目标位置[2~3]。因此,TOA的测量直接影响到系统的定位精度,本文分析了固定门限TOA测量和自适应门限测量,根据最优估计提出了差分匹配滤波法测量TOA,并且在此基础上从提高信噪比角度对此方法做了进一步改进。
2 TOA测量原理
远端接收站主要完成A/C/S模式信号的接收、译码、TOA标记、组报功能,再将测得的带有时间标记的信号送给中心处理单元,接收站的译码、TOA标记等均在FPGA模块中完成。
下面均以S模式应答信号为例分析FPGA进行的TOA测量功能过程。
图1为S模式应答信号组成格式,其由应答报头和应答数据位两部分共同组成。其中,4个前导脉冲组成了应答信号的报头数据,其对应的位置和宽度如下图1所示,报头之后的数据位由112个数据信息位组成,这些信息均使用PPM编码格式。存在脉冲时由1表示,不存在脉冲时由0表示,每个数据信息位均由这些0和1组成,0和1长度为0.5±0.05μs[5],位总长度为1.0μs。

图1 S模式应答信号格式
TOA测量一般是测量信号的第一个脉冲到达时间,以模式S应答信号为例,即测量应答报头的第一个前导脉冲到达时间。FPGA处理原理图如图2所示。

图2 FPGA信号处理原理图
假设时间测量脉冲经过倍频器以后,其频率是f,那么时间测量脉冲的周期就是T=1/f,N=f则为时间计数器在1s内的计数值。假设收到脉冲应答信号时计数器的计数值为M,则TOA测量值为

根据以上描述可知,要想获得精确的TOA测量值,重要的就是测得准确的M值[6],获得M值可以通过下述方式实现。
3 固定门限法测量TOA
传统的检测脉冲信号到达时间的方式为固定门限的方式,它在脉冲的上升沿或者下降沿设定固定的门限,当信号上升沿幅度超过这个门限或下降沿幅度低于这个门限,此时的时间即为脉冲信号到达的时间。原理图如图3所示。

图3 固定门限法原理
3.1 误差因素分析
固定门限法测量TOA引入的误差主要有四方面:系统基站之间时间同步引入误差、FPGA量化时钟引入误差、系统引入噪声带来测量误差和测量信号幅度差异引起的测量误差[7~8]。同步过程产生的时钟误差由同步技术决定,在此不作考虑。
量化时钟引入的误差是指量化时钟对信号进行采样时,由于采样时钟的精度有限引入的测量误差。为减小量化时钟引入的误差,需要提高量化时钟频率,减小量化时钟周期T,一般采用差值法解决量化时钟精度限制。
采用固定门限法测量TOA,若是接收到的脉冲幅度不同,不可避免引入测量误差,如图4所示,由于接收到的两个脉冲幅度分别为A1和A2,引入的测量误差为∆t。

图4 脉冲幅度变化引入的测量误差
为了解决上述测量误差,提出了在信号幅度变化的拐点处测量的方式和根据信号幅度自适应调整门限进行测量的方式[9]。拐点测量方式即在信号幅度最大处进行时间测量,即通过一个时间锁存器和比较器将脉冲幅度最大的时间点作为TOA测量值。自适应门限测量即以脉冲幅度的固定比例(一般为1/2)为门限测量TOA,原理图如图5所示。
噪声引起的误差属于随机误差,是不可避免误差,下面讨论在只有噪声引起的随机误差情况下固定门限测量方式的测量精确度。

图5 自适应门限测量TOA原理
3.2 测量精度
如图3中设脉冲信号脉冲幅度是A,理论脉冲到达时间是T0,脉冲到达时间测量误差是∆T0,T0时刻噪声电压是n(T0),测量脉冲上升沿时间是tr。为分析方便,假定存在噪声时的脉冲上升沿与不存在噪声时的脉冲上升沿斜率一致[10]。

我们用TOA测量误差的均方根表示TOA的测量精度,即

式(3)中,S/N是接收机中频部分正弦脉冲信号与噪声噪的比值,并且受到接收机中频带宽限制,所测量的脉冲信号的上升沿时间近似有tr≈1/B,令S=E/τ和N=N0B,则有

式(4)中,τ代表的是测量到达脉冲信号的宽度,E代表的是接收信号的能量值,N0代表单位带宽的噪声功率。
固定门限法测量TOA,以及为消除误差采用的拐点测量法和自适应门限测量法均是从几何形态上考虑测量脉冲到达时间,接下来从最大似然估计的角度,提出一种差分匹配滤波法测量TOA。
4 差分匹配滤波法
方法原理:用一个数字滤波器(可采用FIR)来匹配SSR信号的脉冲波形,通过滤波器的最大输出来估计每个脉冲的中心位置。在滤波器后面加一个差分器即将最大值点转化为过零点即可以得到输出最大值的点,但是要注意的一点是A/D采样点数大于12。
假定噪声为热噪声,采样点统计独立,g(t)为传输的信号,A代表归一化处理后的幅度,vi'i=1'2...表示在时刻Ti对信号采样点的值,那么信噪比的时间函数可以表示为

式(12)此结果相当于将接收到的信号送到一个脉冲响应和期望信号相同的滤波器;然后经过微分器输出过零值的点[11~12]。
利用Matlab模拟信号源,加入高斯白噪声以后的S模式信号如图6所示,上图为整个S模式应答信号加入高斯白噪声以后的图形,下图为放大四个报头脉冲的示意图,采样率为60MHz。

图6 加入高斯噪声的S模式信号
当用单个到达脉冲信号经过差分匹配滤波后,输出的匹配结果如图7所示。

图7 单脉冲差分匹配滤波器输出图
图7为用S模式应答信号报头一个脉冲经过差分匹配滤波器后输出的结果,我们一般采用报头的第一个前导脉冲。图中所示的过零点对应的采样点即是要求的M值,进而可以求得采用差分匹配滤波法测量得到的脉冲到达时间。
采用最大似然估计等方法得到的脉冲匹配滤波法的时差测量均方根误差为[13]

其中,2E/N0代表的是采用的匹配滤波器的峰值信噪比,β代表的是信号有效带宽,对余矩形脉冲来说,在Bτ>>1时有

将其带入式(13),得到

差分匹配滤波是通过提高了信噪的方式改善了测量精度,由于S模式的不同脉冲的噪声不相关,则若对整个S模式脉冲串匹配滤波,则可实现噪声抵消而能量叠加,理论上可进一步提升信噪比。若M个噪声独立同分布,将积累后的信噪比带入式(13)或者式(15)可得精度:

或者
我们换个角度理解对整个S模式信号脉冲串的匹配滤波,即将脉冲串的匹配滤波拆分成各子脉冲的匹配滤波,测量出各个脉冲到达时间,再减去首脉冲测量得到的脉冲到达时间,再对结果平均:

由于数据位较长,在实际情况下,被干扰的概率较大,而四个报头被干扰的概率为4/120,因此采用报头的四个脉冲做匹配滤波,多脉冲匹配滤波的结果如图8所示,四个波形的过零点对应的采样点即是要求的M值。

图8 报头四脉冲差分匹配滤波示意图
根据式(4)、(15)、(17)做TOA理论精度分析,如图9所示,蓝线代表的RE表示使用单脉冲固定门限法获得的TOA理论精确度,绿线代表的BE表示使用单脉冲差分匹配滤波法法获得的理论精确度,红线代表的SBE表示采用报头四脉冲差分匹配滤波法获得理论精确度。从图9中可以看出,在信噪比为10dB时,脉冲测量到达时间的理论精度分别为 3.35ns、4.74ns、6.71ns。当信噪比为 20dB 时(接收机接收到实际信号的信噪比一般为20dB),SBE的理论精度为2.37,对应的定位精度为0.71m,满足理论要求。
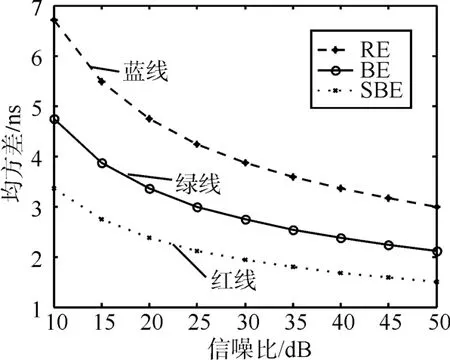
图9 TOA测量理论精度值
5 结语
本文研究了机场场面多点定位系统的时间测量技术。分析了传统固定门限法测量TOA的方法,研究了其误差引入的因素,并且提出相应的消除误差的方法,提出了单脉冲差分匹配法及多脉冲差分匹配滤波法,在此基础上优化了多脉冲差分匹配滤波法。最后,分析比较了固定门限法测量TOA,单脉冲差分匹配滤波法和优化的多脉冲差分匹配滤波法测量TOA的理论精度。
