基于信息熵加权的红外目标识别算法
2021-02-26李长春韩东宁
李长春 韩东宁
【摘要】 为了提高红外目标识别概率,设计了一种基于信息熵加权的目标识别算法。该算法利用红外光谱的特征,结合车辆目标的几何结构特点,将相应特征信息以加权的形式量化给出。实验针对红外汽车目标进行测试,实验结果显示,采用信息熵加权算法的目标识别概率得到了明显的提升,明显优于未使用优化的测试结果,从而验证了本算法的可行性。
【关键词】 目标识别 红外图像 信息熵 加权参数
引言:
红外目标识别是一种能够根据红外图像追踪分析红外热目标的技术,实时精确的红外目标识别算法广泛应用于兵器制导、军事侦察和实时监视等领域。红外目标识别结果往往受环境、识别目标及所处背景的红外辐射的干扰[1]。在实际运用中,常常因为识别目标远,致使在图像中表现为小圆点的形式,从而导致目标信号的强度较弱、形体信息弱、信噪比低,使目标识别难度增大。根据不同的应用场景及目的,将红外探测装置安装在固定位置(如地面等)或运动载体上(如汽车、轮船、飞机等),因此需要使用与之对应的识别算法才能充分发挥系统性能。红外目标身处的环境背景大致分为两类:静态与动态。在静态环境中,目标识别方法又可以分为两种:阈值分割与背景预测[2]。针对环境噪音影响严重的识别问题,设计出可预测背景环境并能实现目标追踪的识别算法,仿真实验结果显示该算法能大大降低天空环境的红外影响,分离出识别目标和强噪声,该算法还有运算简单的优点[3]。针对运动中的背景环境,提出了基于感兴趣区域的区域增强目标实时检测算法,其中在汽车的红外导航系统实验中表现出的结果较为理想[4]。为了对传感器实现全方位的运动补偿引入了伪透视运动模型,该模型可以在降低环境红外干扰从而增强图像信噪比,然而这种全局补偿法计算量较大并且对于补偿的帧间偏移十分有限[5]。
本文提出了一种基于信息熵加权的红外目标识别算法,获得帧间目标信息并对其进行初步的判断,该步骤能有效减少后续图像分区域搜寻目标时的计算量。通过综合判定待识别目标的其他信息,实现减少误报率的功能。
一、目标识别系统设计
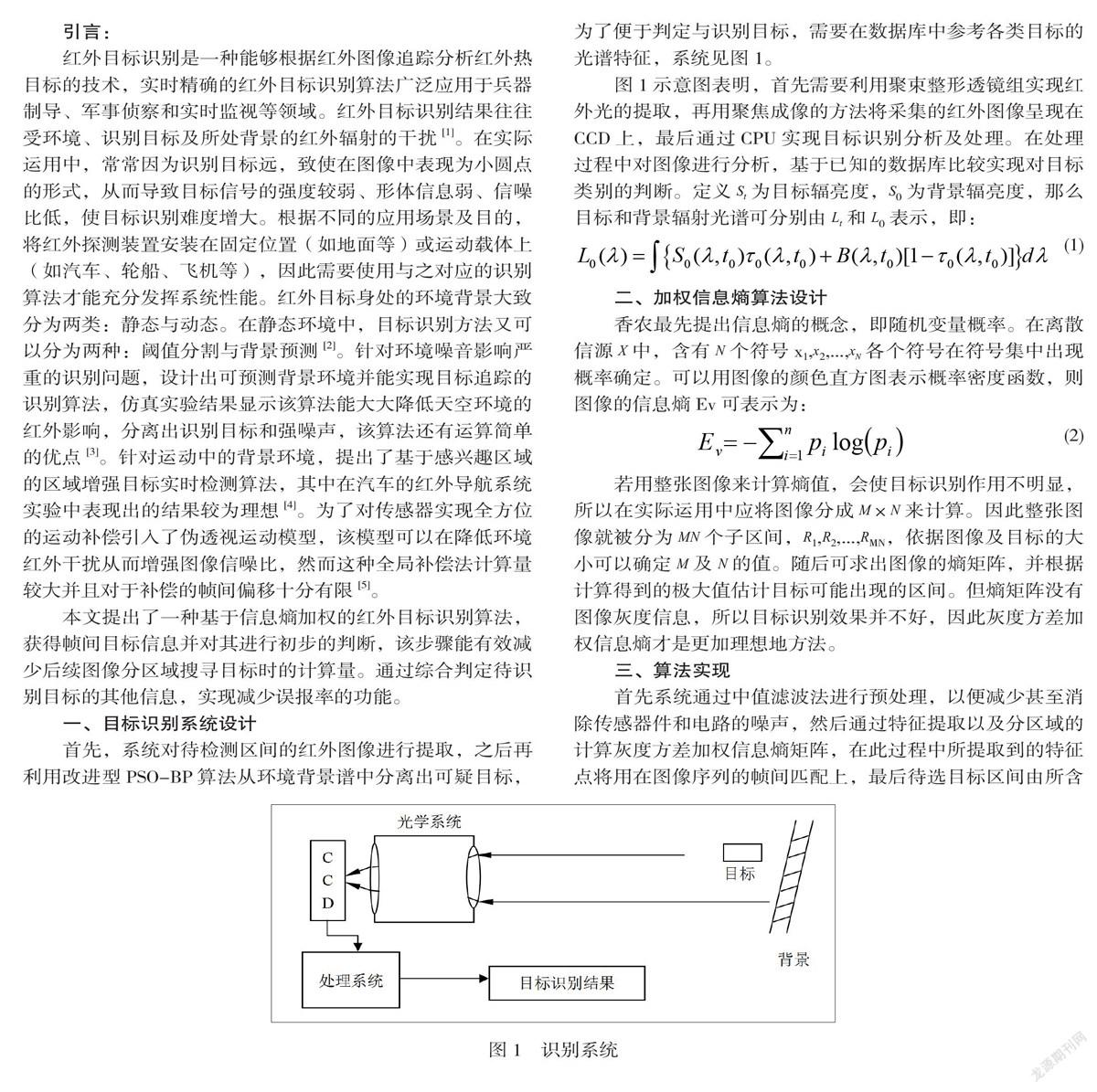
首先,系统对待检测区间的红外图像进行提取,之后再利用改进型PSO-BP算法从环境背景谱中分离出可疑目标,为了便于判定与识别目标,需要在数据库中参考各类目标的光谱特征,系统见图1。
图1示意图表明,首先需要利用聚束整形透镜组实现红外光的提取,再用聚焦成像的方法将采集的红外图像呈现在CCD上,最后通过CPU实现目标识别分析及处理。在处理过程中对图像进行分析,基于已知的数据库比较实现对目标类别的判断。定义St为目标辐亮度,S0为背景辐亮度,那么目标和背景辐射光谱可分别由Lt和L0表示,即:
(1)
二、加權信息熵算法设计
香农最先提出信息熵的概念,即随机变量概率。在离散信源X中,含有N个符号x1,x2,...,xN各个符号在符号集中出现概率确定。可以用图像的颜色直方图表示概率密度函数,则图像的信息熵Ev可表示为:
(2)
若用整张图像来计算熵值,会使目标识别作用不明显,所以在实际运用中应将图像分成M×N来计算。因此整张图像就被分为MN个子区间,R1,R2,...,RMN,依据图像及目标的大小可以确定M及N的值。随后可求出图像的熵矩阵,并根据计算得到的极大值估计目标可能出现的区间。但熵矩阵没有图像灰度信息,所以目标识别效果并不好,因此灰度方差加权信息熵才是更加理想地方法。
三、算法实现
首先系统通过中值滤波法进行预处理,以便减少甚至消除传感器件和电路的噪声,然后通过特征提取以及分区域的计算灰度方差加权信息熵矩阵,在此过程中所提取到的特征点将用在图像序列的帧间匹配上,最后待选目标区间由所含的匹配特征点及熵极大值组成,并且需要对该区域实现目标分离。
首先,提取特征,通过变换不改变图像之间的大小、位置、仿射和方向,并且能够直接准确的对每一帧的图像实现特征匹配,这些点的集合为P1,P2,...,Pn。在此变换下,即便载体处于运动之中,乃至摄像机的焦距不断变动都能够稳定、准确的得到特征点。除此之外,也能直接去除随机运动的云层环境背景。但还是有几率匹配出边缘较强的云层,下面的步骤能将其去除。
其次,计算加权信息熵,将整张图像划分为各个区域块包含4*4的区域块。方便之后对每块区域进行计算,从而获得灰度方差加权信息熵矩阵。该值可以十分准确的评估图像各区域块的灰度及信息变化量,运用矩阵极大值可以识别出图像中的亮斑或者局部能量突变,极大值区域为r1,r2,...,rm。因为云层背景在局部区域上是逐渐变化的,即使云层的边缘对熵矩阵有干扰,但与目标点区域相比其干扰可忽略不计,这样便滤掉了云层的突变;所以后面就能够体现出目标位置灰度及其信息量变化,从而可以初步确定该极大值区域是目标区域。但还需要通过第2步的特征点帧间匹配结果判定在图像中偶然出现的由某些亮点或干扰产生的熵极大值。
然后,计算目标区域,确定目标区域的集合Q为包含匹配特征点的信息熵峰值子区域。也就是需要判别包含熵峰值的局部子区域中是否同时包含所匹配到的特征点。
最后,数字滤波,通过分析每帧的可疑目标,考虑可能是由摄像机抖动所引起,所以目标的运动速度及方向不能看作是向量中元素。在本研究中只需确定能和实时目标完成相关性判断即可,从而最后识别出目标。
四、实验测试
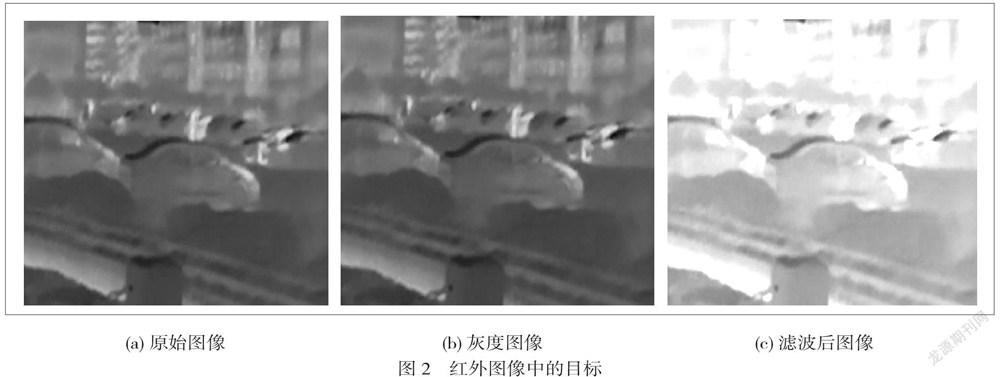
通过将暴露目标a和隐藏目标b放在同一红外成像光谱仪中同时进行检测识别实验。在此实验中,暴露目标a为停放在近处无遮挡、暴露在空旷视野中的汽车,隐藏目标b则为停放在位移较远的由少量杂草遮藏、隐蔽的汽车。在试验过程中,首先应提前使汽车处于熄火状态并长达2小时以上,让其和背景环境中的温度一致,降低因发动机高温出现的红外辐射的干扰,主要是通过对目标在不同的反射界面实现红外特性研究,将得到结果再进行二值化处理从而得到图2。
结合特征波长的数量和位置点计算得出最优解,经过不断的收敛训练,进而优化并改善系统的识别效率。根据上述步骤对光谱数据进行反复多次的改进优化,从而能够预先得到出输入层的数据。当特征波长数值不断增大时,所要识别的目标信息也就愈加明显。综合实际运用中的识别结果,本研究系统不仅优化了原有识别算法,而且能稳定、合理地实现目标分割。因此可知,当此算法出现目标复现时,不仅极其依赖特征波长数,而且无规律地选取波长位置会导致目标复现的效果变差,也会致使其运算时间变长,从而有效改善了目标识别算法的鲁棒性和速率。
五、结束语
提出了一种加权信息熵的红外目标检测算法。通过红外光谱特征与目标几何特征进行加权的方式提高红外图像中的目标识别概率。并且通过实验验证了不同测试条件下的实验结果,结果显示,该方法能够快速可靠地检测出载体运动条件下复杂背景中的红外目标,具有良好的应用前景。
参 考 文 献
[1]苏峰,凌清,高梅国.红外小目标实时检测系统实现[J].激光与红外,2008,38(8):826-829
[2] Chavez-Garcia R O, Aycard O. Multiple sensor fusion and classification for moving object detection and tracking [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 525-534
[3]李晓琼,史彩成,毛二可. 基于高阶累积量的单帧复杂云背景下红外小目标检测 [J]. 光学技术,2008,34(5):696-698.
[4]Tzannes A P,Brooks D H. Detection Small Moving Objects Using Temporal Hypothesis Testing [J]. IEEE Trans on AES(S0018-9251),2002,38(2):570-585
[5]毛曉楠,周越.基于序贯蒙特卡罗方法的自适应红外目标提取算法[J].微型电脑应用,2008,24(4):55-59
