300Mvar空冷隐极调相机转子疲劳强度分析
2021-02-24李志强李桂芳朱志佳王应伦
李志强,周 成,兰 波,李 博,李桂芳,朱志佳,王应伦
300Mvar空冷隐极调相机转子疲劳强度分析
李志强1,周 成1,兰 波2,李 博2,李桂芳2,朱志佳2,王应伦2
(1. 中国电力科学研究院有限公司,北京 100192;2. 哈尔滨电机厂有限责任公司,哈尔滨 150040)
300Mvar空冷隐极调相机转子跨距长、重量大,在自身重力作用下转子挠度和弯曲应力已经达到疲劳设计极限,因此设计出安全可靠的转子结构具有很大难度。本文建立了300Mvar空冷隐极调相机转子疲劳损耗的三维有限元分析模型,分别对机组额定稳态运行工况及起停机过程的瞬态工况进行仿真计算,分析两种工况下转子的动态应力,并进一步对起停机工况的动态应力进行雨流法分析。最后,根据德国机械工程师委员会的FKM疲劳计算导则,对调相机转子进行寿命评估,保证了300Mvar空冷隐极调相机转子的安全可靠性。
300Mvar空冷隐极同步调相机;转子疲劳损耗;动态应力
0 前言
随着我国远距离直流输电工程的大规模应用,换流站对动态无功的需求也越来越大,在电力系统故障状态,瞬时大容量动态无功补偿对于支撑电网节点电压,确保电力系统的稳定性具有重要意义。而静止无功补偿装置受其自身工作特性限制,无法在电力系统故障瞬间提供足够大的动态无功。为保证电力系统安全稳定运行,加强系统电压支撑,国家电网公司开发了一批300Mvar新型调相机,投入到现有高压直流系统换流站,该类型调相机具备在电力系统故障状态快速提供大容量动态无功功率的能力[1,2]。
300Mvar全空冷隐极调相机在电磁性能、结构强度、通风冷却及绝缘方面的设计都面临很大挑战。其中,调相机细长的转子为柔性结构,跨距长、重量大,在自重作用下转子挠度和弯曲应力已经达到疲劳设计极限。对于卧式布置的转子而言,转子疲劳主要来源于旋转一周转子自重产生的交变应力,这种交变应力每循环一次就会对转子产生一次疲劳损耗[3]。除了自重产生的交变应力外,转子在制造过程中会不可避免地由于设计、结构、安装等原因而产生不平衡质量,该不平衡质量产生的离心力也会产生附加交变弯曲应力,尤其在起停机过程中,不平衡质量产生的离心力在转子通过临界转速时,会使动应力急剧增加。这种附加的交变弯曲应力也应该在转子疲劳强度计算中予以考虑[4]。因此,研究调相机转子额定运行和起停机过程中的疲劳对发电机全寿命期内的安全可靠性具有重要工程意义。
本文建立了300Mvar全空冷隐极调相机转子三维有限元分析模型,分别计算额定运行和起停机两种工况下的转子应力分布,确定危险截面,并基于FKM疲劳计算导则,评估了调相机转子的全寿命[5]。
1 数学模型及疲劳评估标准
1.1 数学模型
转子的疲劳强度计算一般包含随起停机所引起的脉动循环应力[6],其幅值一般为额定运行状态应力的一半。在转子的齿部、槽楔和护环等高应力位置,疲劳主要表现为低周疲劳。本文主要研究由于旋转产生的弯曲疲劳,表现为材料的高周疲劳,其幅值为转子的弯曲应力,循环次数与转速相关,这种类型的旋转疲劳破坏是发电机转子高周疲劳的主要原因。额定工况的转子弯曲应力计算可以通过静强度分析得到。起动过程中不平衡质量所引起的弯曲应力需要通过瞬态计算得到,瞬态动力学运动方程如式(1)所示,载荷由起动过程不平衡质量产生的离心力和起动加速过程中的切向力两部分组成。
在旋转坐标系下转子的动力学方程为:

其中,[cor]为陀螺效应矩阵;[spin]为旋转软化效应刚度矩阵。
运动方程(1)有两种求解方法:模态叠加法和直接积分法。本文采用直接积分法,其特点是运动方程可以直接对时间积分,在每个时间点,求解一组联立的静态平衡方程(=),求解时使用完整结构矩阵,不进行缩减。积分时间步长必须足够小,以精确捕捉响应频率、载荷突变及接触频率数据。
1.2 FKM疲劳导则介绍
德国机械工程研究委员会(FKM)编制的《Analytical Strength Assessment of Components in Mechanical Engineering》导则对焊接件及非焊接件的强度和疲劳评估流程如图1所示。通过有限元分析方法、解析计算法或试验方法得到评估部位的疲劳应力幅a,根据材料特性、疲劳应力谱(平均应力、应力幅和循环次数)和结构设计参数计算部件局部的强度极限BK,然后根据安全因子erf获得部件的强度安全裕度BK[7, 8]。
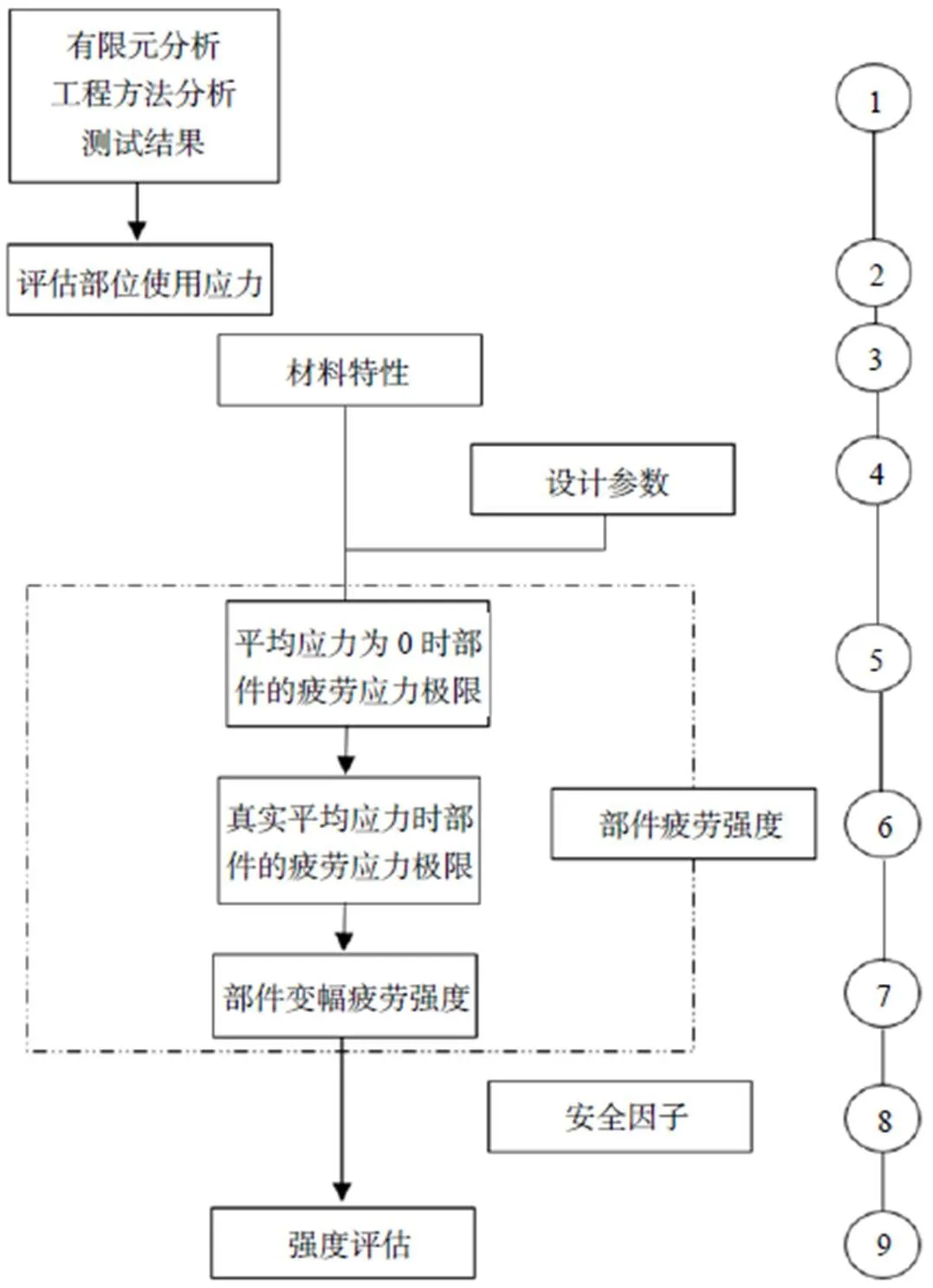
图1 FKM疲劳计算的一般步骤
2 转子动态响应及疲劳损耗分析
2.1 主要参数
额定转速:3000r/min
轴柄直径:640mm
调相机本体直径:1270mm
轴柄与转子本体倒角:60mm
轴柄处应力集中系数:1.86
转子材料:25Cr2Ni4MoV
转子材料屈服极限:690MPa
转子材料强度极限:825MPa
2.2 计算工况
分别对额定稳态运行工况及起停机过程的瞬态运行工况的转子应力进行计算。
机组额定运行工况按40年设计寿命进行考核,则设计寿命期内,额定运行工况要求保证的设计循环次数为:1=3000r/min×60min×24h×365d×40a=6.31×1010次。起停机工况按一天起停一次,则设计寿命期内循环次数为:2=2×365×40=29200次。
300Mvar调相机转子为柔性转子,转子本体一阶临界转速为668r/min,转子本体二阶临界转速为1963r/min,前两阶临界转速均低于额定转速。在一次起动过程中,转子会两次通过临界转速共振点,此时转子的动应力会增大,造成转子疲劳损伤的加剧。采用瞬态动力学方法,模拟转子起动过程,起动方式为匀加速起动,10min达到额定转速,额定转速为3000r/min。
为保证起动过程的计算精度,时间步长选为0.001s,即将最高转速对应周期的1/20作为一个时间步,总步数为600000步。
2.3 计算结果分析
(1)转子局部应力及应力幅计算
本文建立了调相机转子三维有限元求解模型。采用弹簧单元(Combin14)模拟轴承系统支撑刚度[9];梁单元(BEAM188)模拟转子轴段的长度和内、外径;质量单元(Mass21)模拟护环、风扇、转子线圈等部件的附加质量和附加转动惯量[10],如图2所示。

图2 整个转子三维有限元求解模型
额定运行工况转子最大应力位于轴柄位置,大小为51MPa,应力分布如图3所示,图中标出了最大应力截面的位置,局部应力放大图如图4所示。

图3 转子应力幅计算结果
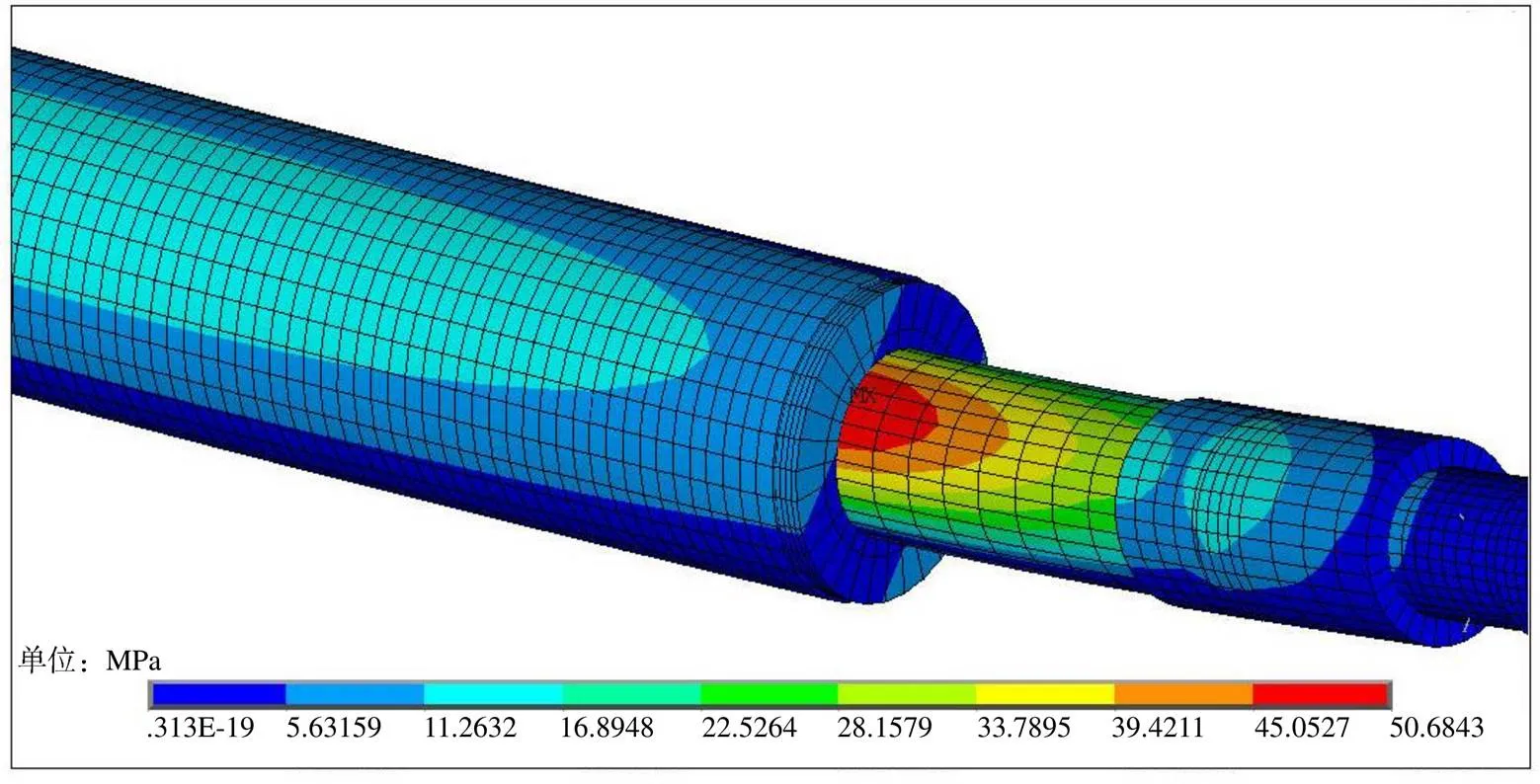
图4 转子最大应力局部
起动过程中转子的最大动应力为7.2MPa,也位于轴柄位置,出现的时刻为139.4s,对应转速为697r/min,由于惯性效应,最大动应力的数值对应的转速稍高于转子一阶临界转速(668r/min)。由于不平衡质量主要位于转子本体,二阶临界转速对轴柄的动应力影响较小,动态应力变化随时间变化的曲线如图5所示。起动过程中轴柄处应力幅、平均应力和循环次数通过雨流法计算后,其直方图如图6所示。由于起动过程中应力幅随转速变化不是恒定值,根据FKM准则中的疲劳累积损伤等效原理,需要将非对称变幅载荷转化为等效损伤应力幅进行评价,等效应力幅值的计算见式(2)[11],计算后的结果为4.3MPa。

其中,;为疲劳载荷总循环次数;nj为第j级载荷对应的载荷循环次数;σa,1为第一级载荷(最大载荷)各方向应力幅值;σa, j为第j级载荷各方向应力幅值;kσ为S-N曲线斜率,根据FKM准则,取值为5;ND,σ为S-N曲线拐点处的循环次数,取值为106;vσ为等效损伤[12, 13]。

图6 雨流法计算的循环次数
(2)转子疲劳强度计算
在静应力和动应力的分析基础上,采用FKM准则对转子轴柄位置进行疲劳强度评估。
正应力和剪应力疲劳极限(对应的循环次数为106)的计算公式如下:



(3)设计参数
对于部件的设计参数,FKM准则涵盖了疲劳缺口系数、粗糙度系数、温度系数、参考点局部应力梯度、表面处理系数、缺口半径及零件壁厚等因素。平面非焊接结构正应力和切应力的设计参数表达式如下:




无表面处理时,表面处理系数V=1;对于钢材料,覆盖层系数S=1;对于除灰口铸铁材料,灰口铸铁常数NL.E=1。
(4)部件疲劳损伤计算
转子疲劳损伤可靠度计算见表1。

表1 损伤可靠度计算表
3 结论
分别对300Mvar空冷调相机转子额定稳态工况和起停机瞬态工况的动态应力进行了仿真分析,并根据FKM疲劳计算导则对转子的疲劳损伤度进行了计算。在设计寿命期内考虑额定工况和起停机工况下,转子总强度安全裕度为83%,满足FKM标准安全裕度不超过100%的要求,但转子结构疲劳安全裕度接近100%,设计余量偏小。根据起停机瞬态计算结果,调相机转子在通过一阶临界转速时,不平衡质量产生的附加应力较大,因此在机组起动过程中应以较快的角加速度冲过该临界转速区间,减少因共振产生的动应力对转子疲劳损伤的影响[14, 15]。
哈尔滨电机厂有限责任公司对300Mvar空冷隐极调相机开展了一系列的深入研究。相关的成果已经成功应用于所生产的调相机中,为机组安全可靠运行提供了有力的保障。
[1] 王梦玲, 陈刚, 张超峰. 新一代大容量调相机在电网中的应用[J]. 电工技术, 2020(8):52-53.
[2] 李志强. 大容量新型调相机关键技术参数及其优化设计[J]. 大电机技术, 2017(4):15-22.
[3] 周新建, 李广兴, 李志强. 兆瓦级风力发电机主轴结构强度及可靠性分析[J]. 机械强度, 2019, 4(2):349-355.
[4] 荆建平, 武新华, 夏松波. 冷启动工况下汽轮机转子的疲劳损伤[J]. 热能动力工程, 2000(11): 598-600.
[5] 陈晓云. 两相短路故障下汽轮发电机组轴系扭振疲劳寿命损耗分析[J]. 电力科学与工程, 2014(3):68-72.
[6] 蒲太平. 基于ASME设计规范的汽轮发电机转子齿疲劳强度分析[J]. 大电机技术, 2018(4):27-30.
[7] 郭晓军, 卜继玲, 曾晶晶. 基于FKM准则的抗侧滚扭杆疲劳强度分析[J]. 机车电传动, 2016(6):39-42.
[8] 孟金凤, 陆正刚, 章焕章. 基于FKM标准的转向架构架疲劳损伤研究[J]. 机车电传动, 2011(1):28-31.
[9] 张直明. 滑动轴承的流体动力润滑理论[M]. 北京:高等教育出版社, 1986
[10] 于佳文. 机电耦合下大型汽轮发电机组轴系动力学特性分析[D]. 北京:华北电力大学, 2019:13-23.
[11] FKM Guideline: Analytical Strength Assessment of Components in Mechanical Engineering(5th edition)[S].
[12] 尚德广, 王德俊. 多轴疲劳强度[M]. 科学出版社, 2007.
[13] 徐灏. 疲劳强度设计[M]. 机械工业出版社, 1981.
[14] 曹仲勋. 汽轮发电机组不平衡响应特性及其影响因素研究[D]. 东南大学, 2018:21-24
[15] 刘树鹏, 葛祥. 某电厂发电机振动故障诊断及处理[J]. 大电机技术, 2016(3):15-18.
Fatigue Strength Analysis of Rotation Shaft for 300Mvar Air-cooled Cylindrical Synchronous Condenser
LI Zhiqiang1, ZHOU Cheng1, LAN Bo2, LI Bo2, LI Guifang2, ZHU Zhijia2, WANG Yinglun2
(1. China Electric Power Research Institute, Beijing 100192, China;2. Harbin Electric Machinery Company Limited, Harbin 150040, China)
The rotor span of the 300Mvar air-cooled cylindrical synchronous condenser is long and heavy, its rotation shaft deformation and bending stress has already reached the fatigue design limitation under its own gravity. Therefore, it is very difficult to design a safe and reliable rotor structure. In this paper, a three-dimensional finite element analysis model of the rotor fatigue loss of a 300Mvar air-cooled cylindrical synchronous condenser was established. The rated steady-state operating condition and the transient operating condition of the start-stop process of the unit were simulated and calculated respectively, and the dynamic stress of the rotor under the two operating conditions was analyzed. The rain flow method was used to analyze the dynamic stress in the start-stop condition. Finally, according to the FKM fatigue calculation guidelines of the German Council of Mechanical Engineers, the life of the adjustable rotor was evaluated to ensure the safety and reliability of the 300Mvar air-cooled cylindrical synchronous condenser.
300Mvar air-cooled cylindrical synchronous condenser; rotor fatigue loss; dynamic stress
TM342
A
1000-3983(2021)01-0054-05
2020-5-10
李志强(1978-),2009年7月毕业于华北电力大学电机与电器专业,取得工学博士学位,从事电力系统实测建模、参数辨识及电磁场数值计算等方面的研究,教授级高级工程师。