洋流对海底钻机着底偏移影响分析
2021-02-19李兰香金永平刘德顺万步炎
李兰香,金永平,刘德顺,万步炎
(湖南科技大学海洋矿产资源探采装备与安全技术国家地方联合工程实验室,湘潭 411201)
0 引 言
海底钻机是进行海洋资源勘探与海底工程地质勘察的相当重要的技术装备[1-2]。海底钻机在着底偏移过程中会受到洋流、波浪等复杂的海洋环境的影响,导致着底的位置发生偏移,这对于海洋资源的勘探和开采会造成严重的影响。目前大多对于海上起吊作业的研究主要是在海面以上,通过对船体、起重机、吊物系统进行动力学建模,分析其波浪以及海风等海面因素对其动态特性的影响规律[3-5]。金永平等[6]在随机不规则波浪激励下建立海底钻机收放系统动力学系统,分析海底钻机在不同水深和海况条件下钻机的摆动情况,得出钻机着底过程的摆动角。与此同时,相关学者对拖曳系统中的拖缆的几何形态进行分析研究,如章浩燕等[7]考虑缆绳自身的受力情况以及海洋环境的作用,给出拖缆的二维几何形态解析法,得出拖缆内部张力的大小与水深之间的关系。但在研究过程中将流体作用力视为定值,没有考虑到洋流大小的变化以及方向的变化等实际海洋作业情况的影响。同时还有一些学者在考虑到海洋环境的复杂影响下,利用水动力分析软件OrcaFlex对海洋资源开采工具下放的情况进行分析研究[7],分析其工具在下放过程中由于其海洋环境所造成的偏移影响[8-11]。
为了深入了解海底钻机在不同洋流情况下的着底偏移变化,本文基于二维力学模型和水动力分析软件OrcaFlex,分别对海底钻机在洋流方向与洋流速度2种变化下的不同情况进行仿真分析。对比分析海底钻机在不同的洋流方向与洋流流速的变化下,力学模型以及软件仿真的着底偏移情况。
在对海底钻机着底偏移进行分析之前,做出以下几点假设:
(1)海底钻机和脐带缆处于同一垂直面,忽略脐带缆的扭转运动。
(2)洋流质点的运动是无旋的势流运动。
(3)在分析着底偏移的过程时只考虑二维平面内的运动。
1 海底钻机着底偏移力学分析与OrcaFlex仿真建模
1.1 力学平衡方程
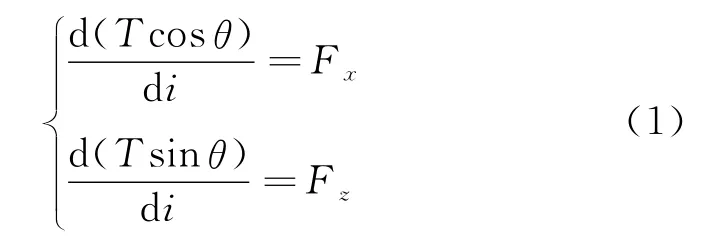
在海底钻机着底的过程中,将海底钻机视为脐带缆的末端。在钻机与脐带缆的接触点处取一节点i,di趋近于0,此节点处的张力Ti沿着脐带缆的切线方向,设该节点处的切线方向与平面内x方向的夹角为θ,该节点的受力包括节点的张力、洋流作用力、节点的自身重力以及节点的浮力。其中洋流阻力、节点的自身重力以及节点的浮力属于外力,在单位长度范围内所受外力可以分为x轴方向分量Fx和z轴方向分量Fz。通过节点的外力与节点的张力可以达到平衡,其平衡方程[7]为
1.1.1 洋流作用力
在海洋中,洋流的方向和流速不是一成不变的,洋流方向受多方面影响,其洋流速度会随着海洋的深度不断加深而逐渐减小。对于细长柱体或柔性圆柱状结构物,其上所受流体作用可以通过Morison公式[12]进行计算,由海底钻机着底运动示意图(见图1)可知,海底钻机与洋流流速的夹角为θ,洋流的方向为φ,则流体作用力可以分解成法向方向和切向方向2个受力[7],即
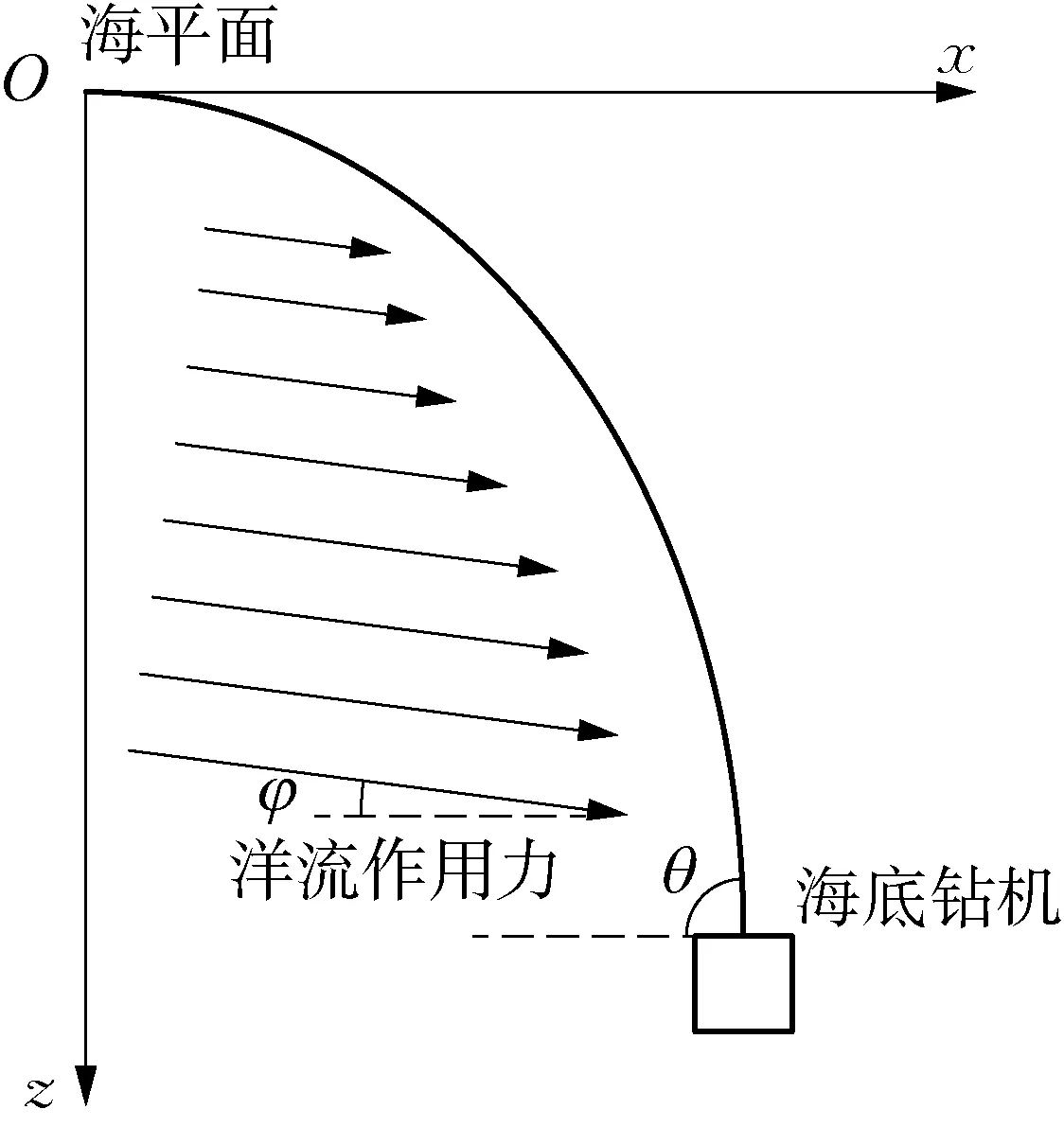
图1 海底钻机着底运动示意图Fig.1 Schematic diagram of the bottom movement of a seafloor drilling rig
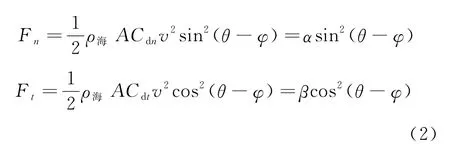
式中:Cdn、Cdt分别为法向阻力系数和切向阻力系数;A为节点i的横截面积;v为洋流速度;α、β为变量。
1.1.2 节点水中重力

式中:B为节点在水中的重力;g为重力加速度;γ为常数。
1.1.3 平衡方程求解
将洋流作用力在x轴和z轴方向上各自分解[7],得
由于节点切向方向的摩擦系数可以忽略不计,即β=0。
根据平衡方程式(1),将式(3)、式(4)代入其中,进行方程式简化,得[7]

式中:T0表示钻机未入水时节点i的张力。式(6)表示节点张力的大小与海底钻机着底的深度存在线性关系。
由式(5)可得[7]

令λ=γ/α,代入式(7),得

对式(8)进行积分求解[7],得

将式(6)代入式(9),整理可得[7]
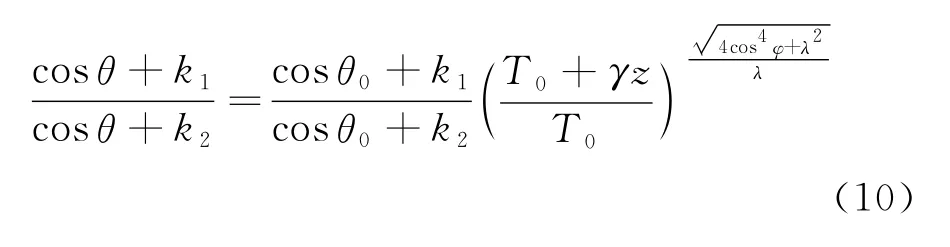
由式(10)可知,cosθ是关于z的变化的函数,故令


1.2 OrcaFlex仿真建模
采用OrcaFlex软件对海底钻机着底偏移过程进行仿真建模。其工具船、绞车、脐带缆等在软件中有相应的简化模型,根据具体情况设定相关数据,在OrcaFlex的软件中,根据“海大号”船体的相关数据,选择软件中接近的船体模型,并在船体上添加绞车模型,根据实际海底钻机收放系统中的绞车数值,设置绞车的高度。脐带缆用一般缆绳模型,根据铠装脐带缆的参数,设置缆绳的直径为0.032 m,选取其安全工作载荷为195 kN,最大破断力为630 kN。海底钻机忽略其自由度相关因素,将其简化成一个方体。对其采用6D Buoy模型建模,其长、宽、高的数值根据“海牛Ⅱ号”的实际数值进行模拟设置。高度设置为6.5 m,宽度和长度设置为6 m。其质量设置为12 t,水中质量为10 t。图2所示为海底钻机着底系统3D仿真模型。
图2 海底钻机着底系统3D仿真模型Fig.2 3D simulation model of the bottoming system of a seafloor drill rig
2 海底钻机着底偏移仿真结果及分析
本文以“海牛号”海底钻机为对象进行着底过程分析,根据各类环境的影响,海底钻机在着底过程中的偏移量是一直在变化的,当海底钻机完成着底时,偏移量达到最大值。本文主要研究洋流方向以及洋流流速的大小对着底偏移的影响。根据式(1)~式(12),建立海底钻机着底偏移力学模型,在MATLAB中根据洋流、波浪以及海况等参数利用龙格-库塔法对数据进行仿真分析。并利用水动力分析软件OrcaFlex对海底钻机着底偏移的过程进行仿真模拟,并分析其洋流方向与洋流流速对其的影响。由于OrcaFlex软件对海洋环境的模拟比较全面,所以在仿真过程中将作业母船在x方向的前进速度设为0,波浪的浪向角选择为45°,海况选取4级(和风),有义波高为0.88 m。将海底钻机的模型简化成柱体。洋流的方向角φ选取0°、30°、45°、90°。洋流流速从4个时期进行分析,洋流参数如表1所示。
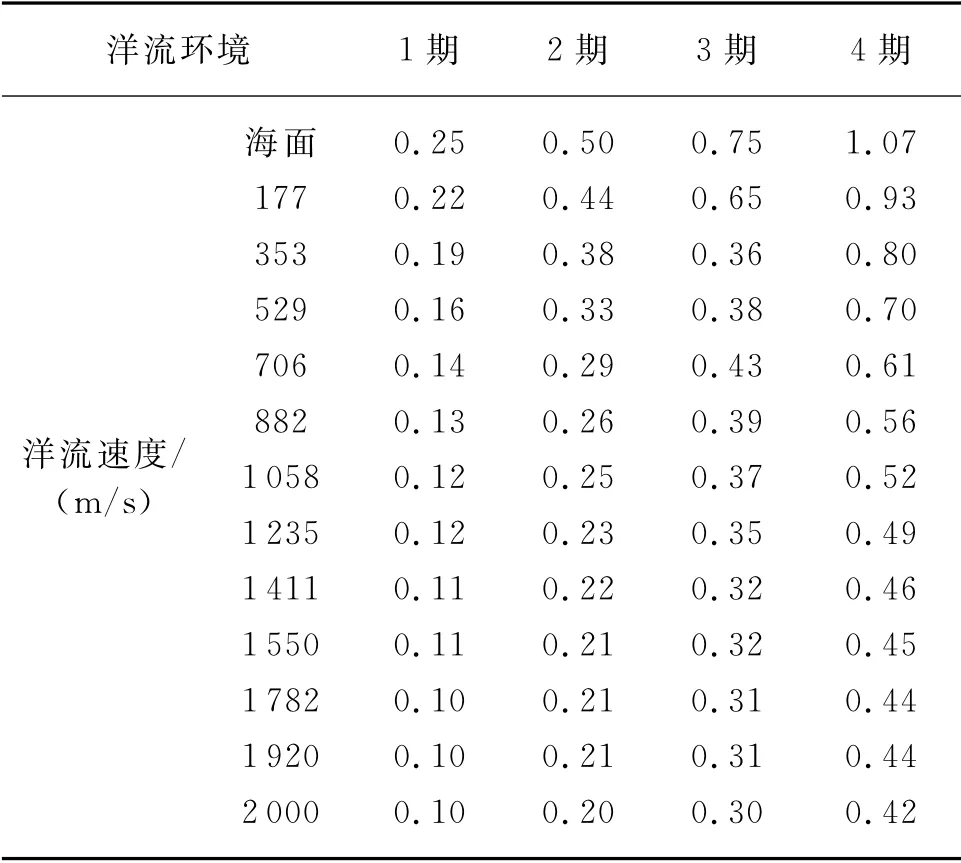
表1 洋流参数[13]Tab.1 Parameters of ocean current
2.1 洋流方向对海底钻机着底偏移的影响
图3所示为不同洋流方向角的情况下海底钻机在着底过程中随着着底深度的增加在x方向所产生的偏移的变化。其中,图3(a)为不同洋流方向下力学模型的仿真曲线图,图3(b)为OrcaFlex软件在不同洋流方向下对海底钻机着底偏移的仿真曲线图。
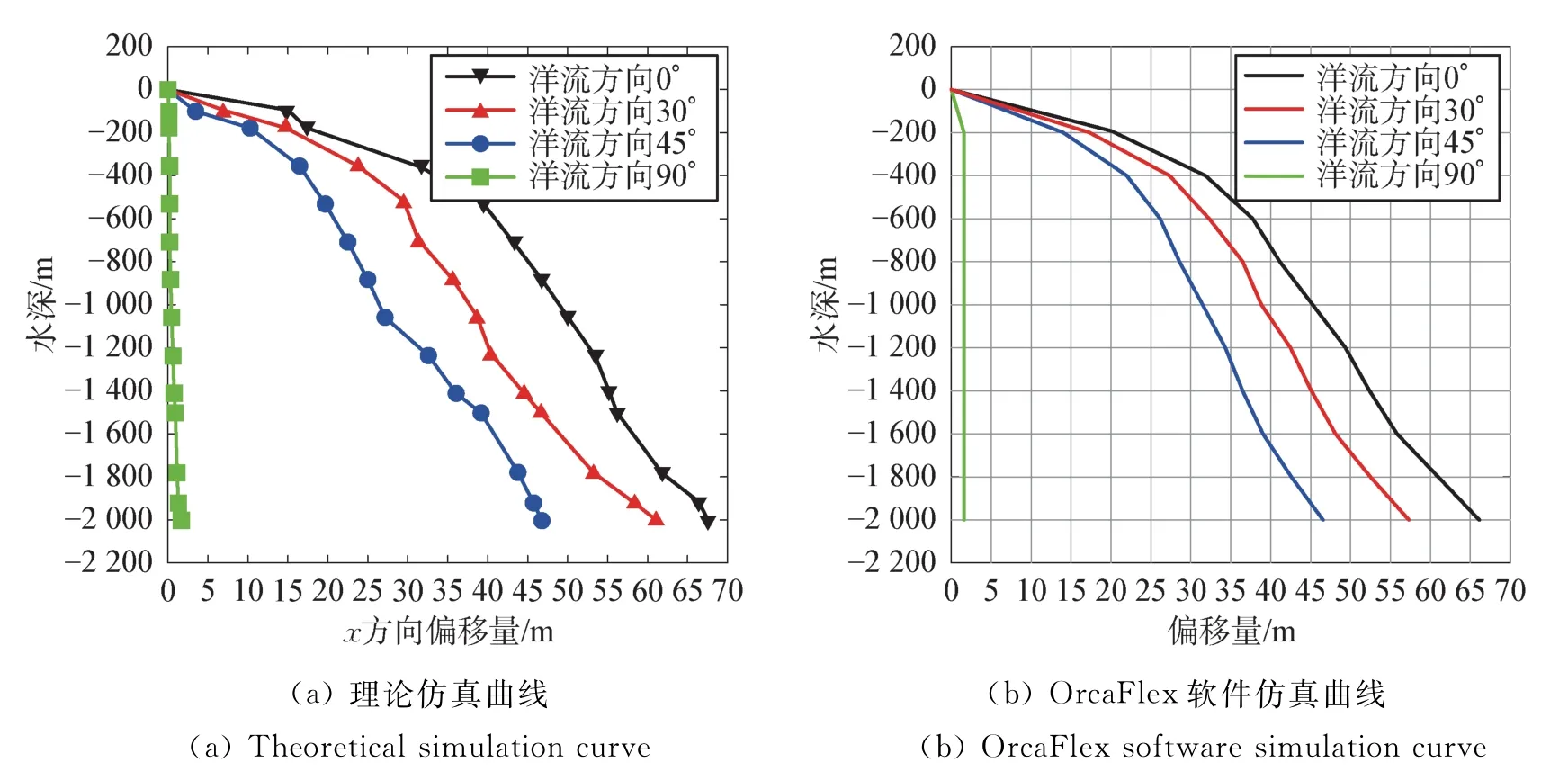
图3 不同洋流方向角的仿真曲线Fig.3 Simulation curves of different ocean current direction angles
表2所示结果表明,在保证其他海洋环境不变的情况下,洋流的方向对于海底钻机的着底偏移产生的影响比较明显,当洋流方向角为90°时,钻机着底的偏移量为1.59 m左右,随着洋流方向角的减小,其海底钻机的偏移量逐渐增大,当方向角为0°时,海底钻机的偏移量达到最大,其大小为67.98 m。从图3(b)仿真结果可以看出,海底钻机的着底偏移量随洋流方向角的变化趋势与图3(a)基本一致。并通过表2的数据分析可以得出力学模型的仿真结果与水动力分析软件的仿真结果比较接近,其误差比较小,尤其是在洋流方向为45°时,其误差大小为1.6%。因此其力学模型对于不同洋流方向的分析是可靠的。
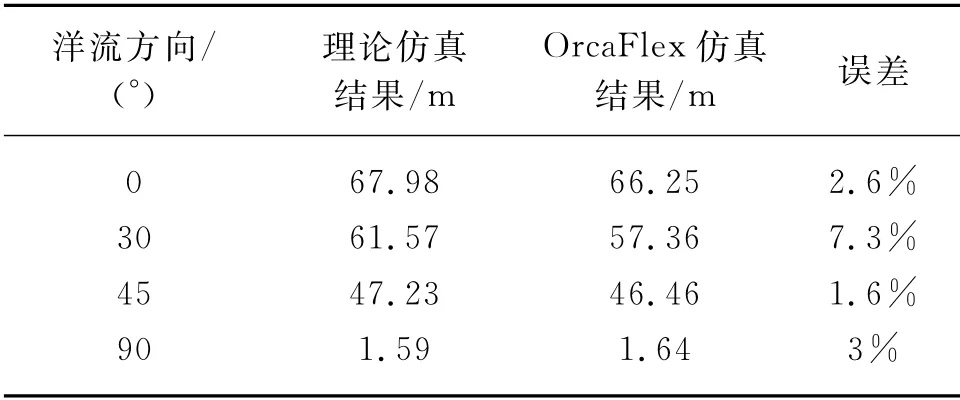
表2 不同洋流方向下海底钻机偏移结果Tab.2 Offsets of a seafloor drilling rig in different ocean current directions
2.2 洋流流速对海底钻机着底偏移的影响
图4所示为不同洋流流速的情况下海底钻机在着底过程中随着着底深度的增加在x方向所产生的偏移的变化。其中,图4(a)所示为不同洋流流速下力学模型的仿真曲线,图4(b)所示为OrcaFlex软件在不同洋流流速下对海底钻机着底偏移的仿真曲线。
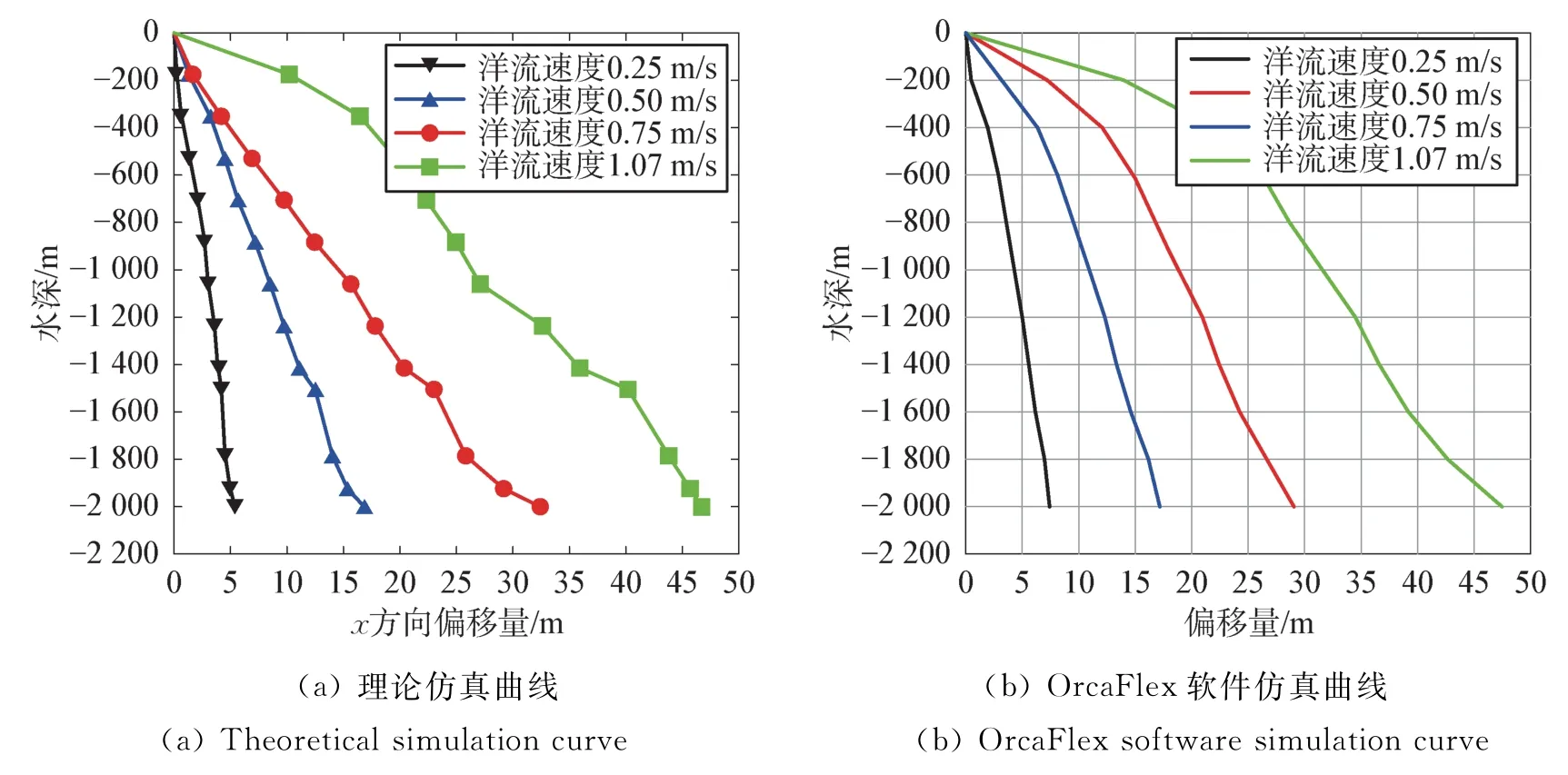
图4 不同洋流流速的仿真曲线Fig.4 Simulation curves of different ocean current velocities
由图4(a)所示结果可以看出,在保证其他海洋环境不变的情况下,洋流流速的大小对于海底钻机的着底偏移产生的影响相对比较明显,当洋流的流速为0.25 m/s时,海底钻机的着底偏移量大约为5.56 m,随着洋流速度的增大,海底钻机着底的偏移量越来越大,当洋流速度为1.07 m/s时,海底钻机的偏移量大约为46.93 m。图4(b)所示是在OrcaFlex中对海底钻机着底运动过程的模拟仿真结果分析,从图4(b)中可以看出,海底钻机的着底偏移量随洋流流速大小的变化趋势与图4(a)基本一致。并通过表3的数据分析可以得出力学模型的仿真结果与水动力分析软件的仿真结果比较接近,但由于一些其他因素的影响,例如当洋流速度为0.25 m/s和0.75 m/s时,力学模型的仿真结果和水动力分析软件的分析结果误差相对比较大,但从整体的仿真结果分析可以看出其力学模型还是存在参考性的,对于海底钻机着底作业具有指导意义。

表3 不同洋流速度下海底钻机偏移结果Tab.3 Offsets of seafloor drill at different ocean current velocities
3 结 语
以深海海底钻机为研究对象,对海底钻机着底运动过程进行二维形态分析,采用Morison公式建立钻机着底偏移的力学模型。研究不同的洋流方向角与不同洋流流速对海底钻机着底偏移的影响,得到以下结论:
(1)通过对力学模型的仿真计算得到不同洋流方向角与洋流流速对钻机着底偏移结果的影响仿真结果,将其与OrcaFlex软件中的仿真结果进行比较,发现钻机着底偏移结果基本一致。因此在实际海洋环境中可以利用OrcaFlex软件对海底钻机着底进行计算与分析。
(2)在保证其他海洋环境不变的情况下,当洋流方向角为90°时,即洋流方向垂直于脐带缆与钻机时,钻机着底偏移量最小,为1.59 m。当洋流流速为0.25 m/s时,钻机着底偏移量大约是5.56 m。因此,在对海底钻机进行着底工作时,最好让海底钻机的工具船垂直于洋流方向,同时在洋流流速较小的情况下进行操作。
(3)根据力学模型可以得出,在海底钻机着底过程中,在选取的二维海洋环境中,海洋环境因素对脐带缆所受到的张力几乎不产生影响。